基于CSS技術的軌道交通機車車輛設備自動調試方法
2021-02-24 10:13:40邱國仙黃偉福
制造業自動化 2021年12期
邱國仙,黃偉福
(常州工程職業技術學院,常州 213164)
0 引言
隨著國際影響力與綜合國力的逐步提升,我國的軌道交通事業越來越發達,開通了更多軌道交通線路,使軌道交通機車車輛的需求量大增,對機車廠的調試技術提出了更高的要求[1]。機車車輛的設計制造工藝包括調試、總裝、車體制造等,各個工藝相輔相成,每種工藝都很重要。其中調試工藝是機車車輛交付之前的最后一道環節,同時也是最嚴謹的環節。為保障軌道交通機車車輛能夠通暢地編組運行,每列機車車輛在交付前都需要實施各系統間的調整和驗證,確保各系統之間能夠流暢地銜接與通訊。由于機車車輛的輔助、網絡、牽引等系統的控制技術含量很高,車輛的調試工作一直有很高的技術難度。據調查,當前國內軌道交通機車車輛生產企業使用的調試設備往往兼容性差、工序繁瑣、自動化程度較低,且無法自動提取關鍵測試數據,因此對軌道交通機車車輛設備的自動調試方法進行研究。
各國都很重視該問題的研究,開展了大量相關研究工作,并進行了多樣化的實踐。但當前的研究成果存在車輛定位不精準、調試耗時長的問題,因此在該問題的研究中應用CSS技術,設計一種基于CSS技術的軌道交通機車車輛設備自動調試方法。CSS技術是指線性調頻擴頻技術,能夠以到達時間為依據對距離進行測量,理論上其測距精度能夠達到米級,并且時間相對誤差越小、距離越遠,其測距精度越高。在軌道交通機車車輛設備自動調試方法的研究中,通過應用CSS技術,實現了列車的精準定位。
1 基于CSS技術的軌道交通機車車輛設備自動調試方法設計
1.1 列車定位模塊設計
設計一種軌道交通機車車輛設備自動調試平臺,其中列車定位模塊的設計具體如下:
基于CSS技術設計列車定位模塊的構成具體如下:定位引擎中心、定位網關、定位錨節點、移動標簽、寄存器以及CSS通信協議。
模塊主要在CSS通信協議下,通過定位引擎中心與定位網關對移動標簽間的同步進行控制,接著在被指定的時隙下利用移動標簽和寄存器對定位錨節點進行依次掃描,通過測距算法計算定位錨節點與移動標簽之間的距離,實現列車的定位。
其中定位錨節點安裝于各機車車輛上,整個定位過程的通訊主要依賴CSS通信協議實現,該協議的設計具體如下:
向上位機上傳的數據格式設計具體如下:每個數據包中都含有一個移動標簽至多個固定節點之間的距離以及對固定節點和標簽進行區分的ID號[2]。各數據包具體構造包括結束符、固定節點號以及該節點距離的具體數據、標簽號、起始符。各數據包能夠發送定位錨節點到移動標簽的距離、至少六個定位錨節點ID號、一個移動標簽。
向下位機上傳的數據格式設計具體如表1所示。
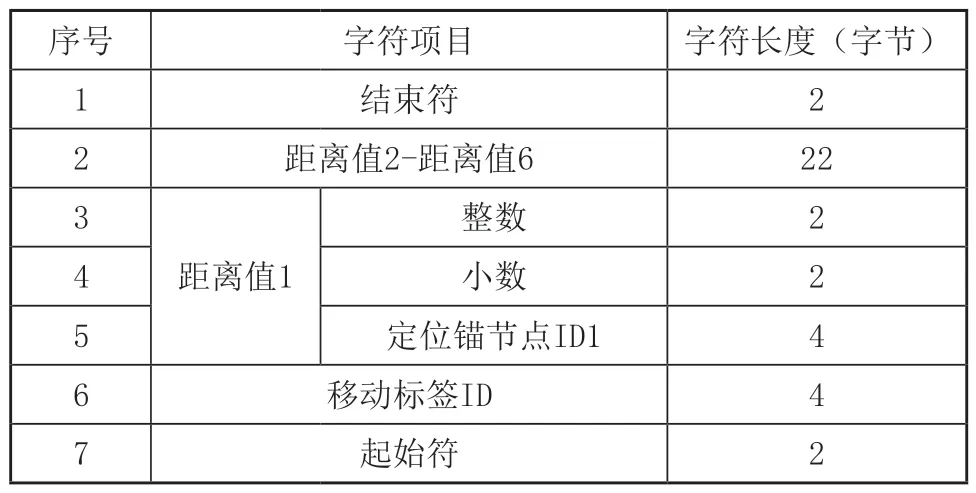
表1 向下位機上傳的數據格式設計
寄存器的空間共有128字節,地址范圍為0x00到OxFF。
選用的測距算法為雙邊雙路測距法,需要進行兩次完整的對稱測量,第一次測量由節點1發起,第二次測量由節點2發起,兩個節點分別為定位錨節點與移動標簽。
具體計算公式如下:

式(1)中Te指的是兩個節點間信號的傳輸時間;Ta是指第一次測量時節點1測量的累加時間;Tb是指第一次測量時節點2測量的累加時間;Tc指的是第二次測量時節點2測量的累加時間;Td是指第二次測量時節點1測量的累加時間。
此時節點1和節點2間距離的計算公式具體如下:

式(2)中c表示光速。
通過該測距算法計算定位錨節點與移動標簽之間的距離。
1.2 調試網絡模塊設計
調試網絡模塊主要基于調試車間使用的工業網絡來搭建,具體構成為車間調試服務器與臺位局域網。
其中車間調試服務器選用的是戴爾數據高端服務器,該服務器的網卡有兩個,將其中一個用于連接工業以太網,而另一個用于連接軌道交通辦公網,使車間工業網絡與企業辦公網絡實現數據通信[3]。
臺位局域網的具體構造包括多終端操作平板、端部模擬試驗器、模擬試驗臺以及關聯組網設備。
多終端操作平板是模擬試驗臺的一種多終端擴展,能夠對臺位局域網進行組建,并為各調試人員配備其操作終端,使調試工人能夠在平板上對相應信號進行觀察和控制,同時對實際的接觸器、繼電器是否動作進行檢查,無須在觀察點和控制點間來回跑動。
模擬試驗臺主要用于實時采集端部連接器信號以及與智能調試設備進行交互。具體功能如下:可以實現車端連接器的線間連接、電源輸入以及電壓測量的邏輯可編程控制;能夠將控制功能在智能調試設備內集成,無需單獨安排操作人員。
模擬試驗臺能夠與被調試的機車車輛MVB總線相連,利用程序模擬組對MVB信號進行收發,從而判斷和檢查被調試機車車輛的的車廂電氣接線[4]。模擬試驗臺的連接圖具體如圖1所示。
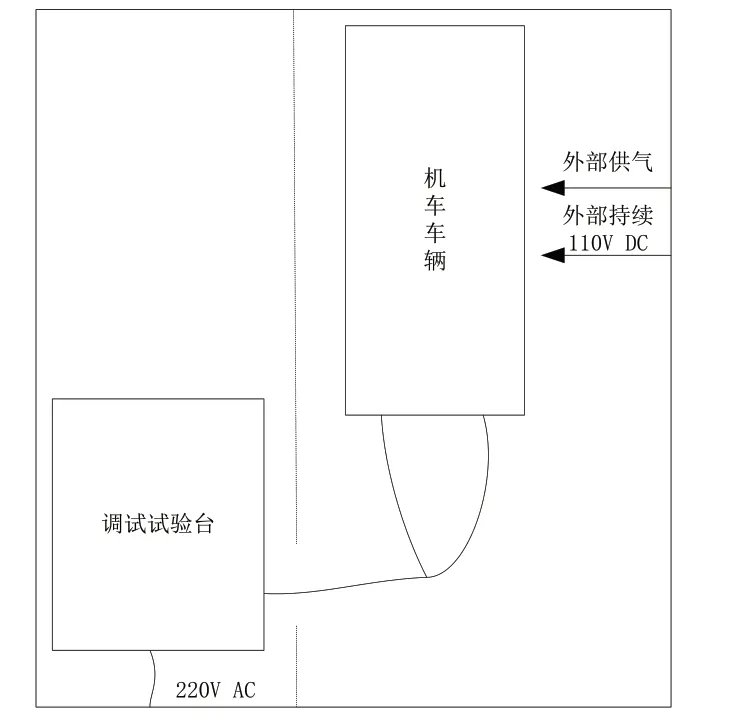
圖1 模擬試驗臺的連接圖
每臺被調試的機車車輛都需要配置單獨的調試試驗臺,可按照順序輪換使用。
1.3 監控模塊設計
在監控模塊中,選用便攜程度較高的工控機作為監控主機。選用的監控主機為邁世OM-A6X,其主機和顯示屏高度集成,能夠提供多個擴展接口,并且采用了電磁屏蔽技術,使主機能夠抵抗環境中的電磁干擾。在機箱外加設密閉式鋁合金層,并在鋁合金上鍍涂具有耐濕熱性、耐水性的防水漆,減少水汽和灰塵雜質對主機的腐蝕,并用減振墊進行包角加固,使監控主機能夠適應機車車輛設備調試的工作環境。
通過MVB通信網卡對監控主機進行驅動,主要調用網卡的驅動封裝函數實現過程數據交互與初始化功能。設計一種MVB通信網卡,使其具備總線診斷和總線管理器功能,總線診斷和總線管理器功能,網卡的功能模塊設計具體如圖2所示。
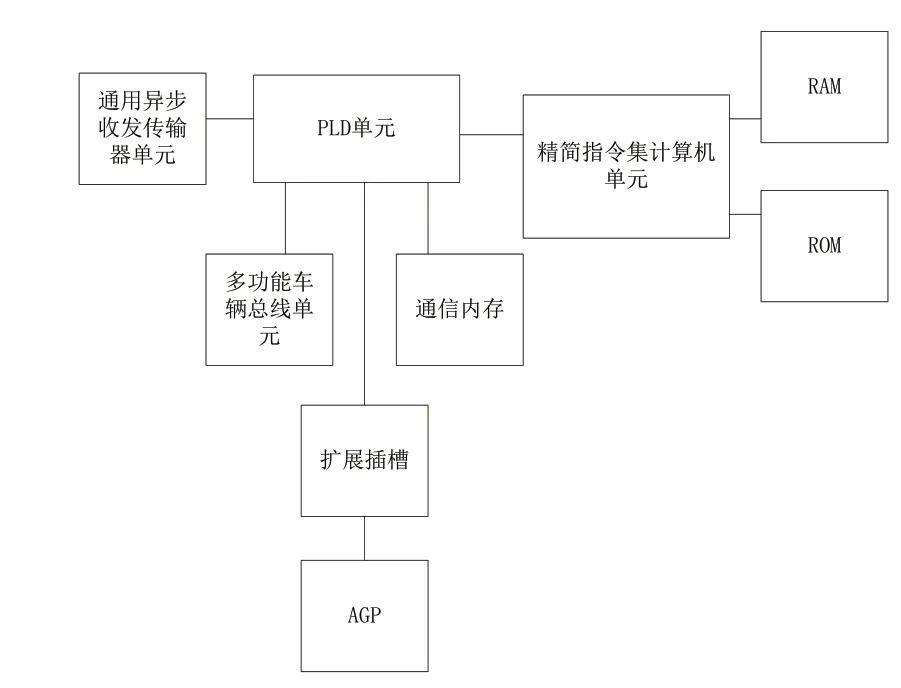
圖2 網卡的功能模塊設計
網卡的內存設計具體如下:
通信量內存設計為512 KByte;
通用內存設計為512 KByte-1284 KByte;
FLASH內存設計為2 MByte。
1.4 設備自動調試模塊設計
在設備自動調試模塊中,在監控主機中運行設備自動調試軟件,將監控主機作為平臺與用戶的對話接口。分為三個層次設計設備自動調試軟件,將用戶界面部分設計為三個單元,分別是硬線I/O調試單元、調試網絡監控單元以及設備狀態檢查單元。
其中硬線I/O調試單元能夠對機車車輛頂端的DI線路通道狀態進行監控,并對DO線路通道進行控制,使其輸出至機車車輛端部。
調試網絡監控單元能夠對車輛調試網絡狀態進行監控。
設備狀態檢查單元能夠檢查向監控主機發送數據的設備的實際在線狀態。
將數據處理部分設計成兩個單元,一是數據發送處理單元,二是數據接收處理單元。其中數據發送處理單元能夠對用戶的調試應用數據進行組裝,使其變成數據包并進行發送待機;數據接收處理單元能夠對用戶的調試應用數據進行發送和接收處理[5]。通過接收處理,軟件能夠以通信協議為依據對數據結構進行定義,在接收的數據包中將需要使用的調試數據解析出來。
通過數據處理部分,軟件能夠實現與調試網絡模塊的數據交互,從而實現機車車輛設備的自動調試。為達到設備自動調試對于通信實時性的要求,將軟件的通信模式設置為UDP模式。
運行設備自動調試軟件的開發平臺選用QT平臺。
1.5 顯示屏模塊設計
軌道交通機車車輛設備自動調試平臺工作環境復雜,調試信息的顯示需要通過顯示屏來完成。為保證操作的舒適度與調試信息顯示的清晰度,選用彩色液晶有源矩陣顯示器作為平臺顯示屏,該顯示屏帶有LED背光系統,在光線較暗處也能夠顯示出清晰的調試信息。該顯示器能夠顯示的顏色超過265832種,具備低電磁干擾、高速度、低功耗的特點,能夠實現圖形顯示。
2 設備自動調試現場測試
2.1 測試場景
于某軌道交通機車車輛制造廠車間中進行設計平臺的測試,先后分別實施單車調試測試與多車調試測試。其中單車測試與多車測試的場景具體如圖3所示。在測試中,首先安裝機車車輛定位設備。

圖3 單車測試與多車測試場景
2.2 單車調試測試
將設計平臺與車輛相連,實施單車調試測試,首先測試設計的基于CSS技術的軌道交通機車車輛設備自動調試平臺的車輛定位性能。
在設計平臺與測試機車車輛的連接中,首先連接二者的電氣,使用的是108芯/46芯電纜,接著連接二者的網絡,使用MVB總線。連接的車輛部位均為尾部車廂。網絡連接后,當MVB指示燈呈現規律閃爍狀態,表明設計平臺與測試機車車輛能夠正常通信。當二者成功連接后,就可以進行設備調試測試了。
在車輛定位性能的測試中,對每個車廂分別進行十次定位測試,取十次測試結果的均值作為最終定位結果,并計算定位結果的均方根誤差,具體計算公式如下:

式(3)中RMSE指的是定位結果的均方根誤差;Xobs,i是指最終定位結果;Xmodel,i指的是實際位置;n是指數據個數;i指的是數據排序序號。
平臺車輛定位性能的測試結果具體如表2所示。
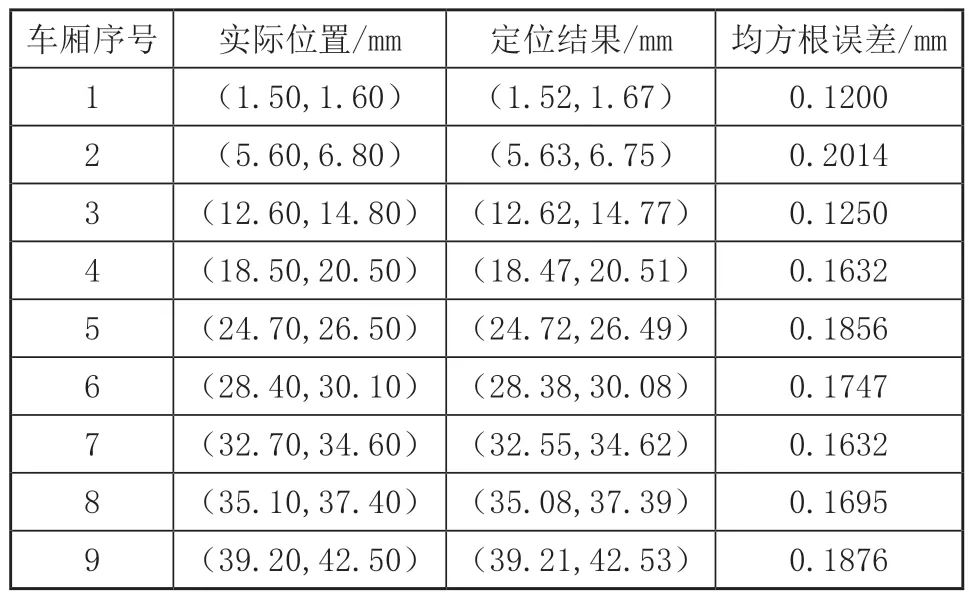
表2 平臺車輛定位性能的測試結果
根據表2的平臺車輛定位性能測試數據,設計平臺對于測試車輛各車廂的定位整體比較精準,定位的均方根誤差較低,最低僅為0.1200mm。說明設計平臺的單車定位性能良好。
接著測試設計平臺的機車車輛傳動系、換擋操縱機構等設備的調試時間,具體調試項目包括離合器分離軸承間隙、離合器踏板自由行程等。
設備調試時間測試結果具體如圖4所示。
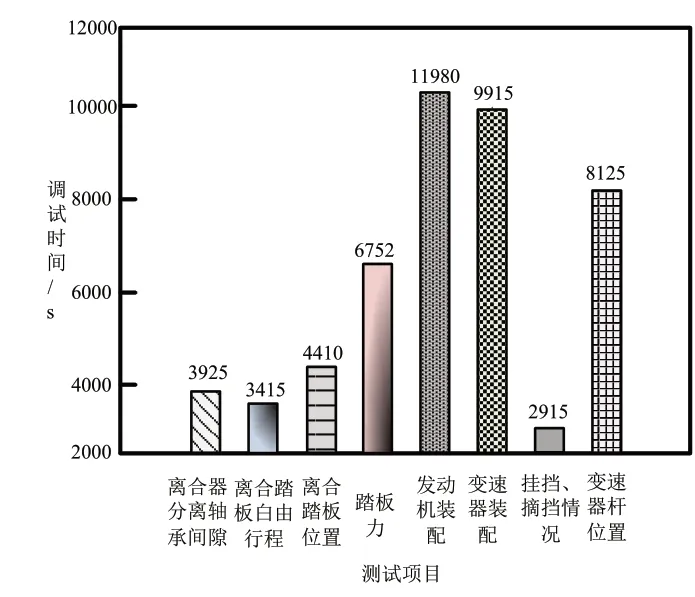
圖4 設備調試時間測試結果
根據圖4的設備調試時間測試結果,調試時間最低的項目是掛擋、摘擋情況,調試時間僅為2915s;調試時間最高的項目是發動機裝配,調試時間為11980s,該項目的調試時間較高是由于包含的子項目較多;總體來說,設計平臺的機車車輛傳動系、換擋操縱機構等設備的調試耗時較低,調試效率較高。
2.3 多車調試測試
同樣連接設計平臺與十臺測試機車車輛,連接方法與上一節一致,首先對平臺的車輛定位性能進行測試。在測試中主要取頭車十次定位測試的平均值作為最終定位結果,具體如表3所示。
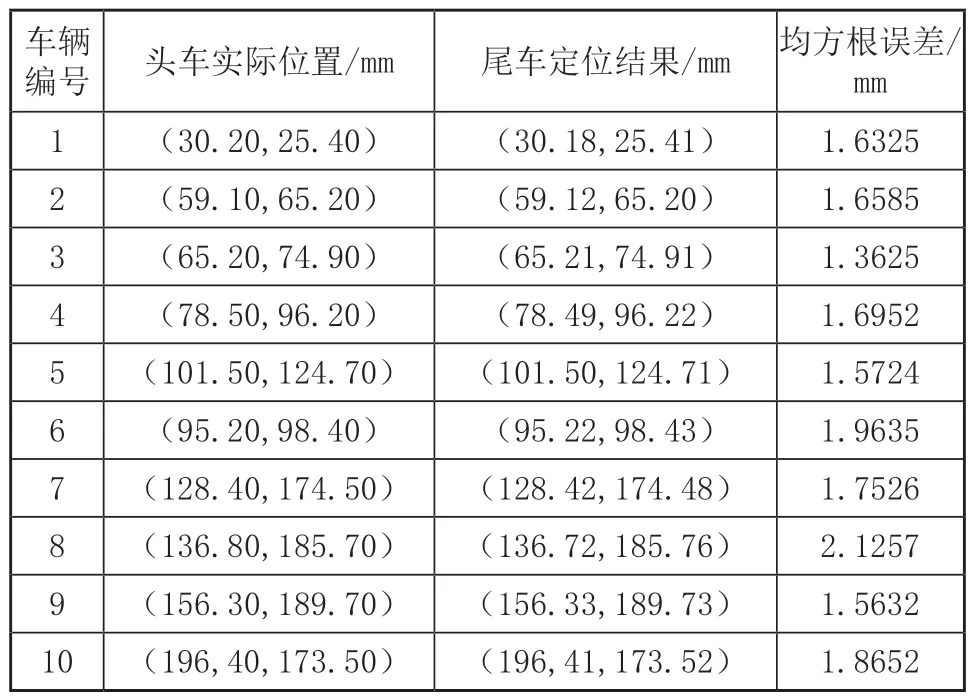
表3 多車定位結果
表3的多車定位結果表明,通過設計平臺能夠實現多車的準確定位,其中定位均方根誤差最低為1.3625mm,最高也僅為2.1257mm,證明了設計平臺的軌道交通機車車輛定位性能良好,以及在平臺的設計中應用CSS技術是很有必要的。
接著測試設計平臺的設備調試時間,具體調試項目包括前后橋制動、踏板制動效能、制動踏板自由行程等。在測試中取十輛機車的平均測試值作為最終測試結果。
測試結果具體如圖5所示。
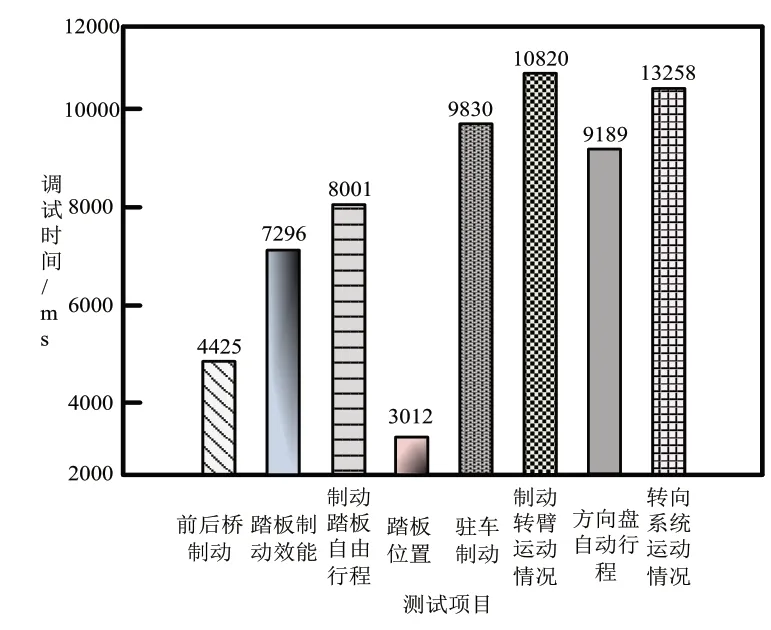
圖5 設備調試時間測試結果
圖5的設備調試時間測試結果表明,設計平臺的前后橋制動、踏板制動效能等調試項目的整體耗時也較低,其中踏板位置的調試時間最短,僅為3012s,其他需要較長調試時間項目的調試耗時也很低。說明設計平臺的自動化程度較高,設備調試性能良好。
3 結語
隨著軌道交通的建設越來越多,機車車輛設備的調試效率顯得更加重要。在對機車車輛設備自動調試問題進行研究的過程中,應用了CSS技術,實現了機車車輛的精準定位,并實現了迅速的設備自動調試。在研究中,取得一定成果的同時,由于研究時間有限,很多問題還未得到解決,例如多車調試效率的提升等問題,將會在日后進一步對這些問題進行研究,完善研究成果。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年12期)2018-08-01 00:47:44
制造技術與機床(2017年6期)2018-01-19 02:41:21
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電子制作(2017年19期)2017-02-02 07:08:38
工業設計(2016年12期)2016-04-16 02:52:00
當代化工研究(2016年6期)2016-03-20 16:21:46
