考慮障礙避讓的尋跡機器人多路徑信息智能定位方法
2021-02-24 10:13:18姜旭東杜銀波于學(xué)斗
制造業(yè)自動化 2021年12期
姜旭東,杜銀波,于學(xué)斗
(1.臨沭縣人民醫(yī)院設(shè)備科,臨沂 276700;2.德州學(xué)院,德州 253023)
0 引言
可移動的尋跡機器人能夠感知周圍環(huán)境,并能夠通過動態(tài)決定的執(zhí)行與規(guī)劃來控制自身的運動,尋跡機器人技術(shù)的誕生與發(fā)展對于人類生產(chǎn)來說帶來了巨大的影響。尋跡機器人由于自身具有一定的路徑?jīng)Q策功能,因此能夠在一些惡劣條件下代替人類進行一些工作,在生產(chǎn)、駕駛等多個領(lǐng)域均取得了較好的效果[1]。但是目前尋跡機器人在多路徑信息的智能定位中,由于尋跡機器人在工作范圍內(nèi)會存在一定的障礙。與傳統(tǒng)的工業(yè)用機器人相比,尋跡機器人服務(wù)的區(qū)域環(huán)境是具有一定機動性的。也就是說,在工作范圍內(nèi),可能出現(xiàn)的障礙物的數(shù)量以及位置都是隨機的,傳統(tǒng)的尋跡機器人多路徑信息智能定位中所得到的機器人路徑還有一定的優(yōu)化空間,從路徑長度上來說并不是可選擇的最佳路徑,為了提升機器人工作效率,因此本文在考慮障礙避讓的情況下,設(shè)計一種尋跡機器人多路徑信息智能定位方法。
1 考慮障礙避讓的尋跡機器人多路徑信息智能定位方法
1.1 引入基于障礙避讓的傳感器技術(shù)
對于工業(yè)用途中的尋跡機器人來說,在任務(wù)進行的過程中,遇到障礙物會發(fā)生一定的碰撞,導(dǎo)致?lián)p壞或側(cè)翻,在多路徑的信息智能定位方面也存在誤差,因此影響機器人在正常工作中的性能。為了保證尋跡機器人能正常工作,需要使機器人能夠?qū)φ系K進行避讓。傳感器的主要作用就是能夠精準(zhǔn)獲取環(huán)境外部信息,令機器人在任務(wù)完成的過程中實現(xiàn)障礙避讓[2]。機器人中安裝的傳感器必須要能夠精準(zhǔn)地測量到行駛范圍內(nèi)障礙物的狀態(tài)數(shù)值,主要是由于傳感器內(nèi)部存在特定部件,能夠測量出我們需要的信息,在獲取到數(shù)值信息之后,將其轉(zhuǎn)換成傳感器可以發(fā)送的電信號,在信號調(diào)節(jié)以及內(nèi)部組件的共同作用下完成信號的傳輸。傳感器的種類很多,因此一些傳感器在進行信號轉(zhuǎn)換時,需要預(yù)轉(zhuǎn)換才能實現(xiàn)數(shù)據(jù)與電信號之間的變動。除此之外,傳感器中還存在一些敏感元件,能夠直接測得理化信號并完成內(nèi)部計算,直接輸出對應(yīng)的參數(shù)量,例如熱敏電阻就能夠感知溫度變化,并將其轉(zhuǎn)化成電參量之間的變化。另外,傳感器中的轉(zhuǎn)換元件也是重要的核心部分,在實際的應(yīng)用中,傳感器整體的使用應(yīng)該具有測量范圍足夠大的量程,并與機器人和工作環(huán)境具有較好的適配性[3]。對于紅外傳感器來說,需要能夠發(fā)射和接收紅外光,利用障礙物的反射光接收時間差,能夠計算出障礙物距離。搭配超聲波傳感器中陶瓷片所具有的壓電效應(yīng),能夠利用超聲波對外部環(huán)境信息進行探測。壓電陶瓷片的極化效應(yīng)如圖1所示。
圖1中的極化效應(yīng)實際上是傳感器壓電陶瓷片受到外界壓力后的一種微小變化。當(dāng)壓電陶瓷片接收到傳感電壓之后,由于電荷之間的作用力影響,電陶瓷片外部電荷會出現(xiàn)極化現(xiàn)象從而發(fā)生形變,傳感器通過微小的形變來實現(xiàn)消息的傳遞與接收。
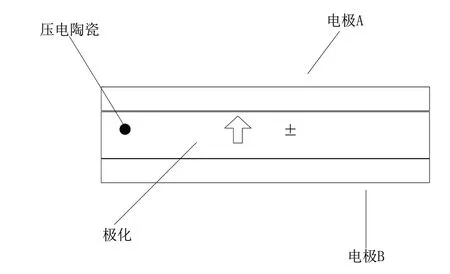
圖1 壓電陶瓷片的極化效應(yīng)
1.2 尋跡機器人工作多路徑信息建模
通過傳感器技術(shù)獲取到障礙物信息后,由于機器人僅在地面移動,因此在建模過程中,忽略掉障礙物的高度,在二維環(huán)境下進行環(huán)境建模,通過傳感器接收到的信息,對機器人工作的空間進行靜態(tài)分割,分割成兩個或兩個以上的區(qū)域,在信息智能定位的過程中可以大幅提高計算效率[4]。在一般的方法中,一般利用柵格來構(gòu)建環(huán)境地圖,這樣能夠?qū)C器人和障礙物有效的利用顏色進行區(qū)分,并且能夠控制柵格的大小來滿足不同建模的精細(xì)程度。柵格建模能夠?qū)崿F(xiàn)具體環(huán)境的離散化,并能夠清晰展現(xiàn)出機器人的運行路徑,并在計算過程中提供便利,并將柵格與實際環(huán)境區(qū)域進行對應(yīng)。在機器人工作過程中所建立的二維環(huán)境區(qū)域內(nèi),在進行環(huán)境建模分割之前,首先要設(shè)置機器人運動范圍內(nèi)所有障礙物的邊長集合為h,則可以得到環(huán)境建模空間中的分割閾值,設(shè)置為范圍內(nèi)最大障礙物的邊長長度值hd,可以用式(1)來表示:

在建模過程中,假設(shè)機器人工作的范圍空間長度為H,將整個范圍內(nèi)的二維環(huán)境模型利用分割閾值分割,根據(jù)具體分割次數(shù)的不同,得到不同的分割部分[5]。在環(huán)境空間建模的過程中,需要正確識別傳感器探測的射線,確定射線將要進入的分區(qū)序號Nnew,判斷過程如式(2)所示:

上式中,zpc表示尋跡機器人所攜帶的傳感器在超聲波/紅外管發(fā)射射線分割點的映射位置;z表示該射線在行駛范圍內(nèi)的二維方向向量的高度絕對值;u和d為下半分區(qū)中某靜態(tài)小分區(qū)序號。在此基礎(chǔ)上,對所有點進行最小化處理,能夠得到點之間的平面距離和像素值差異,得到精確建模位姿。
1.3 規(guī)劃信息定位路徑
尋跡機器人在完成工作范圍內(nèi)的信息建模之后,根據(jù)得到的模型需要對自身的行走路徑進行規(guī)劃,在全局規(guī)劃下根據(jù)得到的實時環(huán)境模型有效規(guī)避障礙物,并選擇最優(yōu)路徑達到目標(biāo)點。尋跡機器人在行進過程中,需要根據(jù)內(nèi)置的導(dǎo)航行進航線的調(diào)整和轉(zhuǎn)向,傳感器的位置也一般在機器人的中心位置,且發(fā)射出的信號基本是平行于地面的。機器人在這樣的二維空間下,當(dāng)預(yù)先設(shè)定了某種任務(wù)需求時,能夠利用遍歷的方法找到一條從起點到終點找到路徑最短的且能夠完成障礙避讓的路徑。本文在規(guī)劃信息定位路徑的過程中,不僅需要從全局視角下進行規(guī)劃,還需要根據(jù)實際情況對局部路徑進行規(guī)劃。局部的路徑修正一般是保證總體上機器人行進的路程最短,在經(jīng)過角度和距離的計算之后,將得到的結(jié)果結(jié)合信息模型進行綜合分析,將最終的結(jié)果發(fā)送到串口位置。路徑規(guī)劃的修正流程如圖2所示。
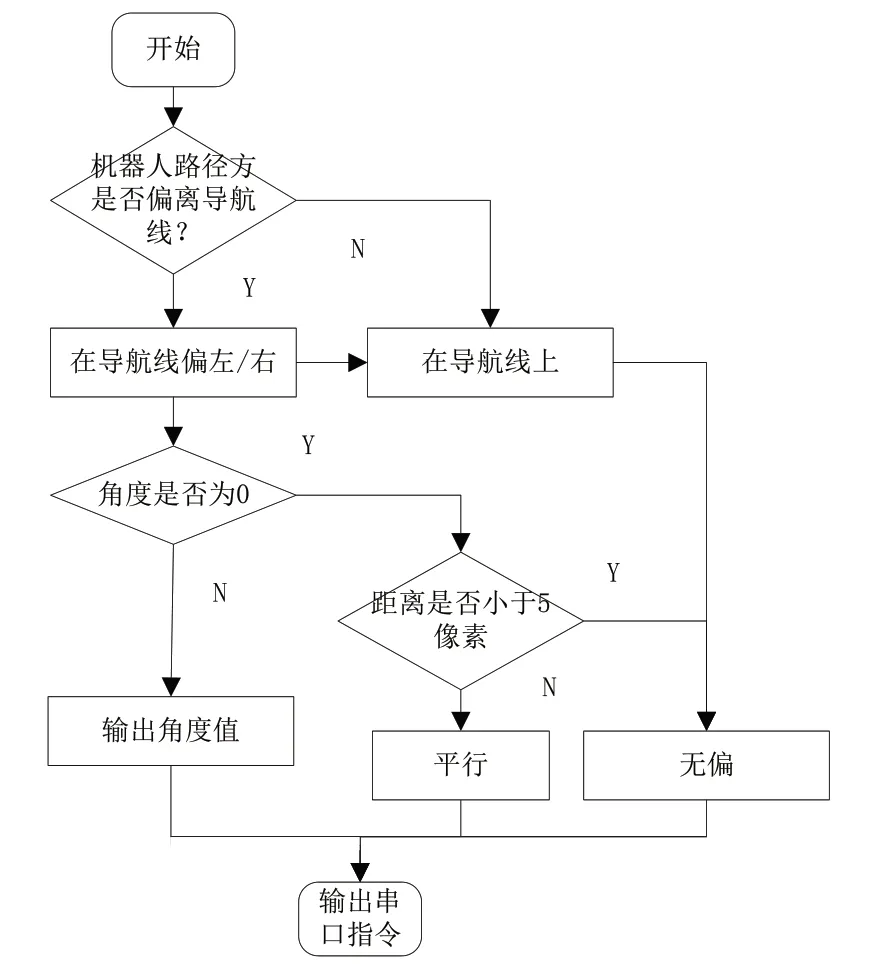
圖2 路徑規(guī)劃的修正流程
在轉(zhuǎn)向判斷的過程中,需要在機器人的導(dǎo)航線上選取任意兩個點,并獲取這兩點的坐標(biāo)和傳感器的重心坐標(biāo),并假設(shè)任意兩點間的連線方向為機器人的行駛方向,并根據(jù)坐標(biāo)之間的計算關(guān)系,確定傳感器在行進方向上的位置。在圖像上能夠表示出中心點和導(dǎo)航線之間的關(guān)系,利用幾何知識能夠判斷出機器人的位置。在機器人前進的過程中,如果遇到障礙物,需要進行行為仲裁執(zhí)行,在遇到障礙物是,需要抑制前行的保持行為,根據(jù)信息定位過程中的規(guī)則來執(zhí)行減速避障行為。
為了精準(zhǔn)地確定機器人的偏離程度,需要計算出精確的偏離角度,能夠提升機器人在行走過程中的準(zhǔn)確度。偏離夾角的計算公式為:

上式中,(x1,y1)、(x2,y2)是選擇的任意兩點的坐標(biāo),那么當(dāng)發(fā)生偏離時,則有:

上式中,(x3,y3)是傳感器的坐標(biāo)。對于路徑中間含有特定目標(biāo)點的情況下,機器人在工作范圍內(nèi),從預(yù)先設(shè)置的起點出發(fā),在最終達到終點的過程,中間還會按照順序有若干個目標(biāo)點,機器人需要按照一定的順序進行停靠。在這樣的形式任務(wù)下,想要得到最優(yōu)路徑,就需要從全局進行規(guī)劃。本文信息智能定位方法的主要目標(biāo)是令機器人在工作過程中,從起點到終點選擇總長度最短的路徑,根據(jù)最短路徑的算法,構(gòu)建出網(wǎng)格圖來方便計算,按照各個中間目標(biāo)點的位置建立集合,將各點之間的最短路徑求出,并與障礙物的形狀信息之間進行融合,并記錄到有效的可視點和可視路徑的長度,能夠得到相應(yīng)的可視點。由于障礙物形狀的不同,可以得到多條不同的路徑,取所有可行路徑的最短路程的最小者,即完成多路徑之間的信息智能定位,得到尋跡機器人的最佳路徑規(guī)劃。至此完成考慮障礙避讓的尋跡機器人多路徑信息智能定位方法的設(shè)計。
2 方法性能測試
2.1 測試環(huán)境流程設(shè)計
為了驗證本文設(shè)計的考慮障礙避讓的尋跡機器人多路徑信息智能定位方法的有效性,需要將設(shè)計的智能定位方法在實際的應(yīng)用中進行測試。設(shè)置實驗場地內(nèi)尋跡機器人的工作范圍為300*200的長方形區(qū)域,并在其中設(shè)置不同形狀的障礙物,并在其中設(shè)置多個不同形狀的障礙物。測試實驗場地障礙物的示意圖如圖3所示。
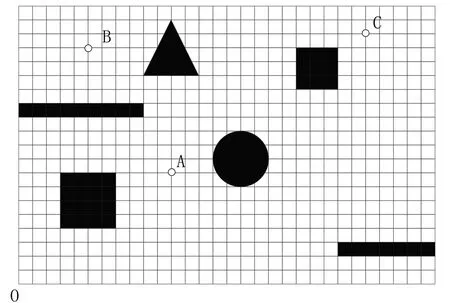
圖3 測試場地障礙物示意圖
上圖中,點O為尋跡機器人的起始位置,在以該點作為原點建立坐標(biāo)系時,可以利用坐標(biāo)描述出不同形狀障礙物頂點或圓心的位置。假設(shè)上圖中每個小方格的邊長為一個單位,那么設(shè)定尋跡機器人在直線行走的過程中最大速度為3個單位每秒,在轉(zhuǎn)彎過程中,最大的轉(zhuǎn)彎速度可以通過下式求出:
上式中,r表示轉(zhuǎn)彎半徑,轉(zhuǎn)彎過程中如果最大速度超過上式所得的值,那么機器人將會發(fā)生側(cè)翻影響接下來的測試。在實驗場地中,存在以下幾個特殊點,點O(0,0),點A(110,80),B(50,170),C(250,180)。在考慮到障礙避讓的過程中,機器人從點O出發(fā),依次經(jīng)過A、B點,以C點作為機器人的行駛終點,并分別使用本文設(shè)計的考慮障礙避讓的尋跡機器人多路徑信息智能定位方法和傳統(tǒng)的基于模糊控制的信息智能定位方法進行測試,利用兩種方法分別得到兩種不同的路徑規(guī)劃方案,并對比兩種路徑的優(yōu)劣。
2.2 實驗結(jié)果對比與分析
在上述實驗環(huán)境下,分別得到兩種定位方法下最終計算出的尋跡機器人路徑,如圖4所示。
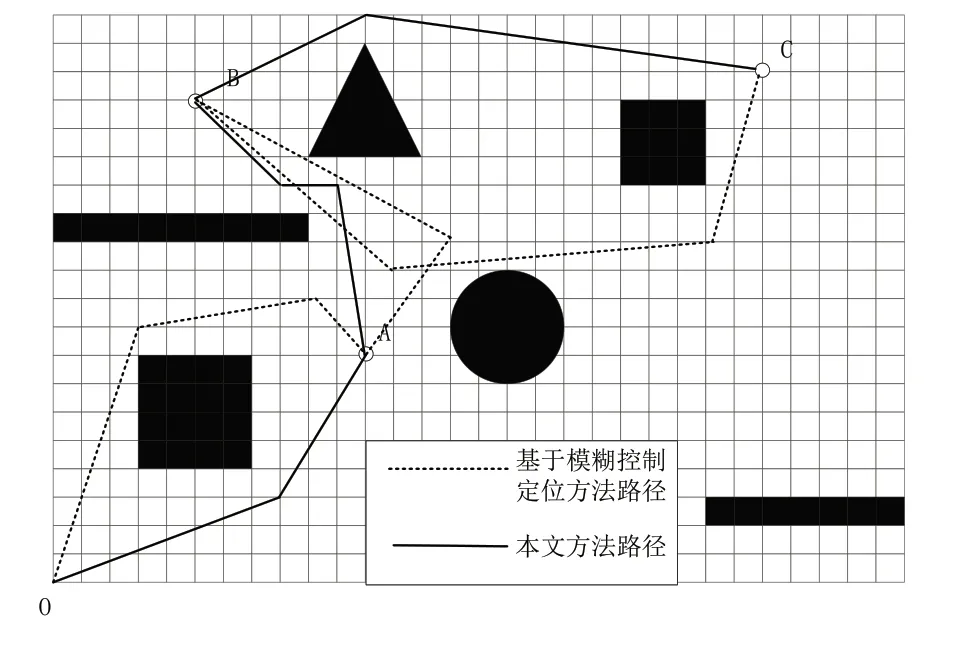
圖4 兩種方法路徑對比
將上圖中的測試結(jié)果輸入到分析軟件中進行編程計算,得到的分析結(jié)果如表1所示。
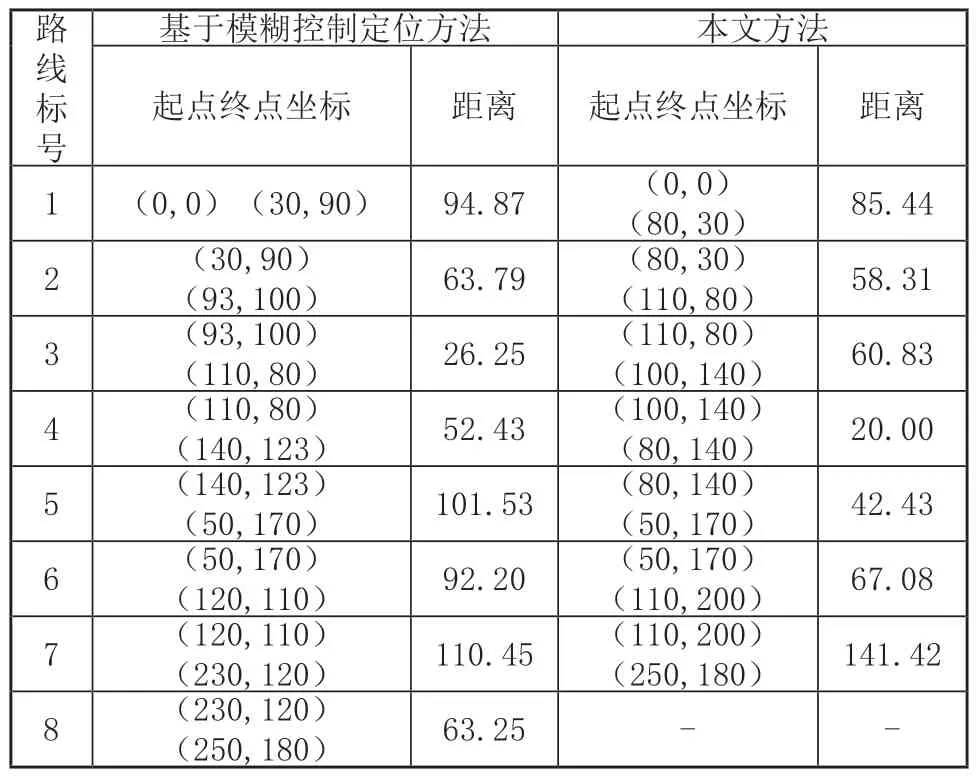
表1 兩種方法下的路徑分析
根據(jù)上表中得到的數(shù)據(jù),可以計算出兩種方法下尋跡機器人行駛的總路線長度,傳統(tǒng)的基于模糊控制定位方法路徑方案的總距離為604.76個單位,本文方法路徑方案的總距離為475.51個單位,對比兩路線的距離,可以得知本文多路徑信息智能定位方法下得到的路徑方案更短,對于尋跡機器人在實際中的應(yīng)用,是具有一定的便利和指導(dǎo)性的。
3 結(jié)語
本文針對尋跡機器人目前在多路徑信息智能定位方面存在的劣勢進行了研究,在考慮障礙避讓的情況下,引入傳感器技術(shù),完成多路徑信息的建模,規(guī)劃信息定位路徑,在機器人起點和終點之間得到一條能夠有效避障且距離最短的行駛路徑。在實驗驗證中也證明了方法的可行性和有效性,但是由于時間關(guān)系的限制,在實驗中障礙物環(huán)境比較簡單,并且僅僅考慮了機器人的直線行走,在今后的研究中,需要對算法方面進行優(yōu)化,測試復(fù)雜環(huán)境,并將機器人在運行過程中的曲線運動考慮進去,在本文方法的基礎(chǔ)上進行優(yōu)化。
猜你喜歡
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
祝您健康(1987年3期)1987-12-30 09:52:32
