旋轉機械電動振動臺的PLC自動控制器設計
2021-02-24 10:13:14王曉飛
制造業自動化 2021年12期
王曉飛
(洛陽職業技術學院 信息技術與城建學院,洛陽 471000)
0 引言
PLC控制芯片是應用于工業領域的重要產品,其能夠實現目標的位移控制、加減速控制等眾多指標的控制。發電機、離心壓縮機、汽輪機等機械設備是目前常用的旋轉機械。目前,旋轉機械已成為工程領域中必不可少的設備之一[1]。
伴隨著工業行業自動化水平的不斷提升,眾多領域的研究學者對旋轉機械展開深入研究。旋轉機械利用增速減速用齒輪作為傳動裝置,旋轉機械的設備間存在緊密聯系。
旋轉機械電動振動臺是控制旋轉機械穩定運行的重要設備,高效控制旋轉機械電動振動臺可保障旋轉設備良好運行,對于保障建筑等領域的生產安全、提升設備安全水平來說具有重要作用。
旋轉機械電動振動臺是激振型設備,通過電動振動臺獲取機械產品零部件的構架強度以及運行狀態的相關信息。旋轉機械電動振動臺具有較寬的工作頻段,具有容易控制的優勢。電動式是電動振動臺的主要驅動方式,電動振動臺利用線圈帶動臺面實現振動工作。
目前,針對PLC控制器的研究較多,如基于隔振加動力吸振方法的振動控制器[2]和基于變頻控制器的高頻搖振控制器[3]等。本文在傳統研究的基礎上,設計了一種新的旋轉機械電動振動臺的PLC自動控制器,實現對旋轉機械電動振動臺的高效控制。
1 PLC自動控制器設計
1.1 PLC自動控制器總體設計
充分考慮應用于工程中的旋轉機械電動振動臺控制需求,選取PLC控制芯片作為控制核心,設計適用于工程中的PLC自動控制器總體結構圖如圖1所示。
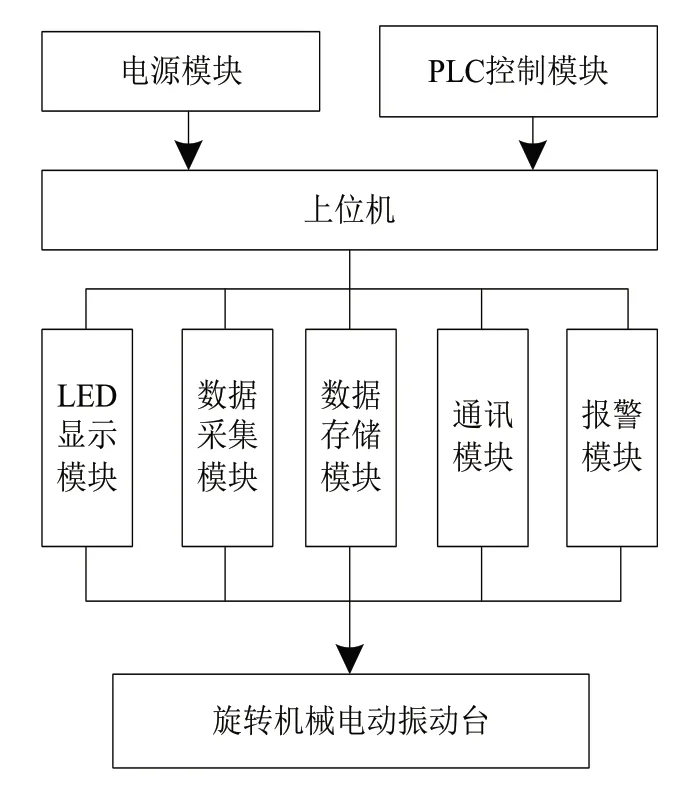
圖1 PLC自動控制器
PLC自動控制器包括通訊模塊、顯示模塊、上位機、報警模塊、控制模塊等模塊。利用電源模塊為控制器提供電能,電源模塊中將電流濾波器串聯至電源變壓器中,提升控制器的抗干擾能力。控制器利用PLC控制模塊實現應用于工程中的旋轉機械電動振動臺的精準控制。
PLC控制器利用上位機控制LED顯示模塊顯示旋轉機械電動振動臺各項運行參數以及振動運行情況,通過加載單神經元PID控制算法實現電動振動臺的控制。控制器利用數據采集模塊以及數據存儲模塊采集以及保存數據,通過通訊模塊實現控制器內信息的傳輸。此外,本研究在控制器中還設置了報警模塊,用于提升控制過程的安全性。
1.2 硬件設計
1.2.1 PLC控制模塊
將PLC控制芯片與計算機結合設計PLC控制器的控制模塊。PLC自動控制器的控制模塊結構圖如圖2所示。
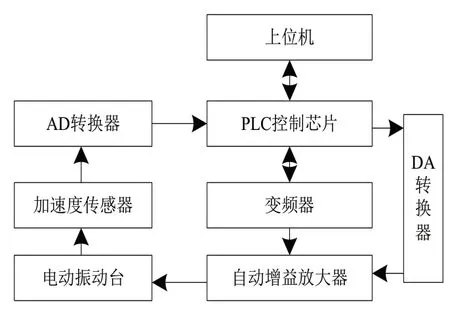
圖2 PLC控制模塊
通過上位機實現電動振動臺的控制。通過上位機輸入控制器參數完成控制過程顯示,利用上位機實現PLC控制程序的修改以及LED顯示界面的控制。PLC自動控制器具有底層控制作用,可控制應用于工業工程中的旋轉機械電動振動臺變頻器輸出頻率控制,通過振動方向的選擇控制自動增益放大器。
選取臺達DVP12SA211型號的PLC控制芯片作為PLC自動控制器的控制芯片。該控制芯片為晶體管輸出,供電大小為24VDC,包括8個輸入接口以及4個輸出接口,主站與從站通訊接口分別為RS-232以及RS-485[4]。PLC控制芯片利用RS-485總線控制電流的頻率變化。
1.2.2 報警模塊
PLC自動控制器可能存在無法控制振動臺的情況,采用報警模塊對電動振動臺管理人員發出警報,報警模塊電路圖如圖3所示。
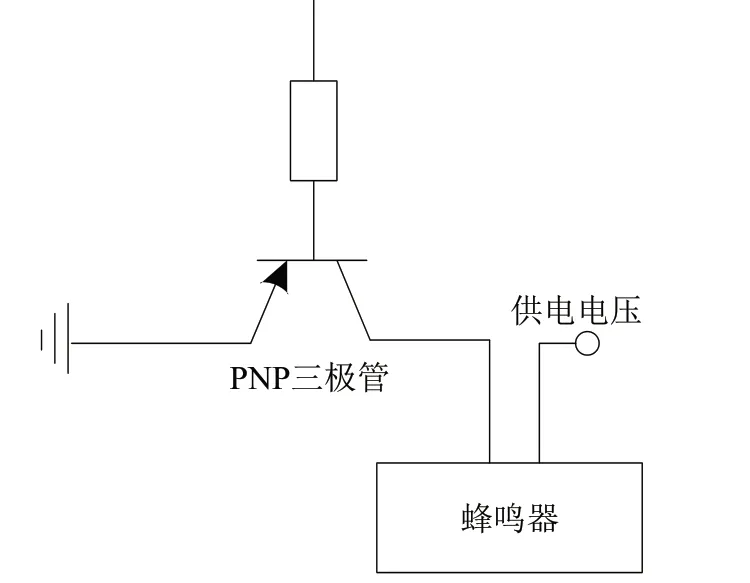
圖3 報警模塊電路圖
圖3中,PLC自動控制器設置的報警模塊采用蜂鳴器結構一體化設置,蜂鳴器結構一體化是重要的發生器。蜂鳴器主要包括無源蜂鳴器以及有源蜂鳴器兩部分,兩種蜂鳴器分別利用方波驅動以及輸入的低電平驅動,實現蜂鳴器應用于報警模塊中的發生[5]。選取有源蜂鳴器應用于工程中旋轉機械電動振動臺的PLC自控控制器中,作為報警模塊的警報輸出。選取型號為8550的PNP三極管應用于報警模塊中。PLC自動控制器復位過程中,其中包含的全部管腳均輸出高電平,控制器輸出高電平時,利用非門將高電平反向轉換至低電平,PNP三極管經過轉換后呈現飽和狀態,處于導通狀態,此時蜂鳴器可以發生警報聲音。報警模塊中的蜂鳴器的電壓大小為+6V,PNP三極管由于飽和處于導通情況,電壓轉換為0.8V,將報警模塊中限流電阻的電壓設置為5.2V。
1.2.3 時鐘電路
PLC自動控制器的時鐘電路結構圖如圖4所示。
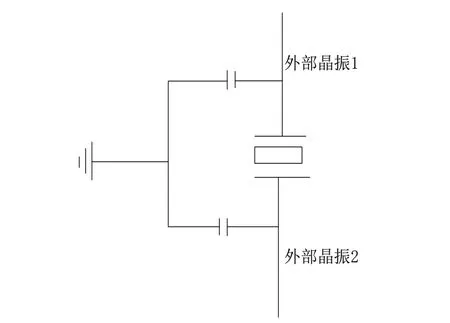
圖4 時鐘電路圖
圖4時鐘電路圖可以看出,時鐘模塊中包含兩個外部晶振作為輸入端和輸出端的反相放大器,構成并聯諧振回路。時鐘模塊中設置大小為32pF的微調電容,利用微調電容令電流接通上電過程中的晶振起振,設置13MHz作為晶振頻率。
1.3 軟件設計
1.3.1 PLC控制程序
選取模塊化編程思想進行PLC自動控制器的軟件編程。PLC控制程序編程流程圖如圖5所示。
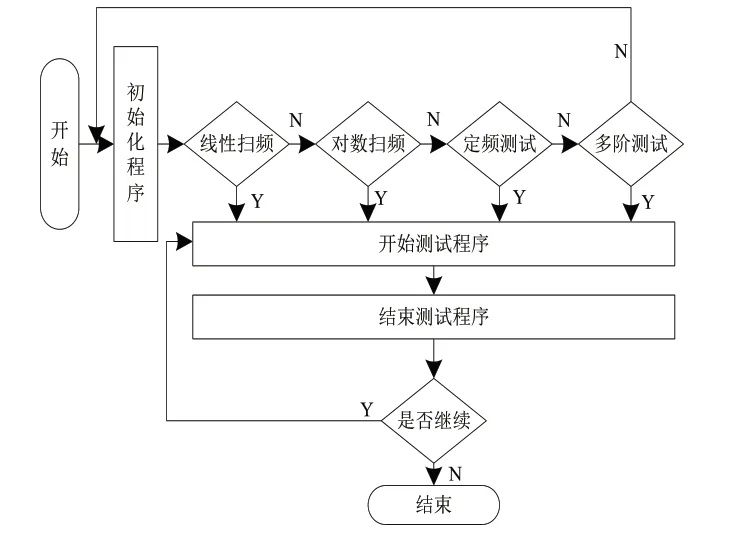
圖5 電動振動臺PLC控制流程
圖5中,PLC控制程序包含多個子程序模塊,各子程序模塊利用主程序組合與調用。
1.3.2 單神經元PID控制算法
本研究選取單神經元PID控制算法作為PLC自動控制器的控制策略。PLC自動控制器輸出誤差需為最小,通過單神經元修正PID控制算法的輸出誤差,提升PLC自動控制器對環境變化的適應性能。PLC自動控制器的輸出誤差表達式如下:

式(1)中,ym與y分別表示理想輸出與實際輸出。
采用單神經元修正控制器輸出誤差的輸出表達式如下:

式(2)中,u(k)與u(k-1)分別表示k與k-1的輸出信號,K表示控制參數,wi表示加權系數,xi表示單神經元學習PID控制算法的三個參量。
三個參量表達式分別如下:
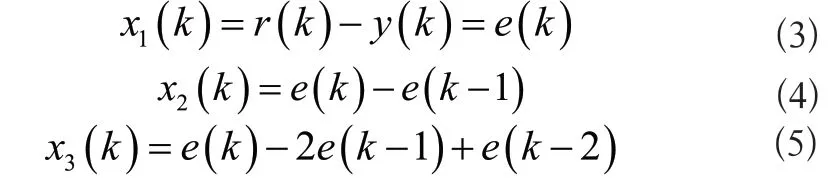
式(3)~式(5)中,r(k)與y(k)分別表示控制器給定參數以及控制器的實際輸出。
以上分析可知,單神經元控制方法與PID控制方法存在較高的相似性。結合單神經元控制方法與PID控制方法,建立PLC自動控制器控制的目標函數如下:

引入加權系數wi,令wi沿著所建立的PLC自動控制器目標函數搜索wi的負梯度方向,搜索結果表達式如下:

式(7)中,vi表示PID控制算法中的參數P、I、D的學習速度。
規范化處理以上公式,可得應用于PLC自動控制器中的單神經元PID控制算法表達式如下:
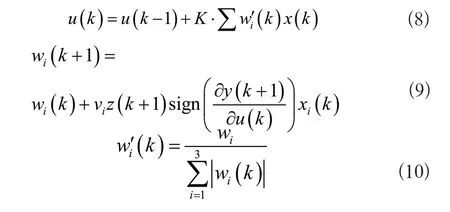
通過以上過程完成控制器的控制。
2 實例分析
為驗證本文設計的有效性,將所設計的PID控制器應用于某施工中的建筑工程項目中的SR155-C10型旋轉鉆機電動振動臺中。
SR155-C10型旋轉鉆機是應用于土木工程建筑工地中的重要設備,是建筑工地中打樁設備,鉆孔直徑為1500mm。該設備具有較高的靈活性,具有整機尺寸小的特點,且其運輸便利、可靠性高。選取昆山海達精密儀器有限公司的HD-G826電動振動臺作為測試PLC自動控制器控制性能的儀器。該電動振動臺最大負載可高達1000kg,主動機功率為4kW~56kW,頻率范圍為5Hz~4000Hz。
通過自閉環實驗驗證所設計PLC自動控制器的控制性能。設置掃頻測試的頻率點為10Hz,所設計控制器濾波前后的時域波形對比結果如圖6所示。
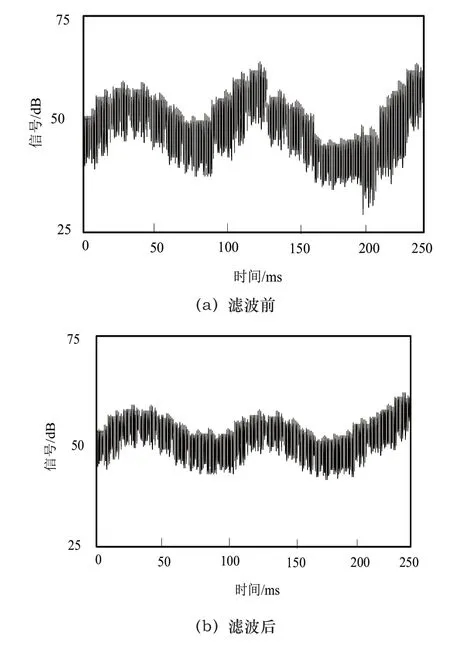
圖6 濾波前后時域波形
分析圖6實驗結果可以看出,采用本文方法設計的PLC自動控制器可有效降低電動振動臺的信號噪聲,提升電動振動臺運行過程中的信噪比。圖6實驗結果驗證所設計PLC自動控制器具有較高的控制性能,可滿足振動控制對濾波精度的需求,還可以有效改善振動信號的信噪比。這是因為本文方法對電動振動臺信號進行濾波,可以獲取更加準確的信號,提升控制器的控制精度。未濾波前獲取的電動振動臺時域信號未出現正弦特征,采用所設計的PLC自動控制器濾波后,電動振動臺輸出的時域信號具有典型的正弦特征。所設計PLC自動控制器具有較高的抗干擾能力,該控制器將電流濾波器串聯至電源變壓器中,避免高頻噪聲對輸出信號干擾,提升了控制器的抗干擾水平。
統計本文方法設計的PLC自動控制器在掃頻測試的不同頻率點大小時,對電動振動臺振動信號的改善情況。將本文方法與文獻[2]方法以及文獻[3]方法設計的控制器對比,對比結果如表1所示。
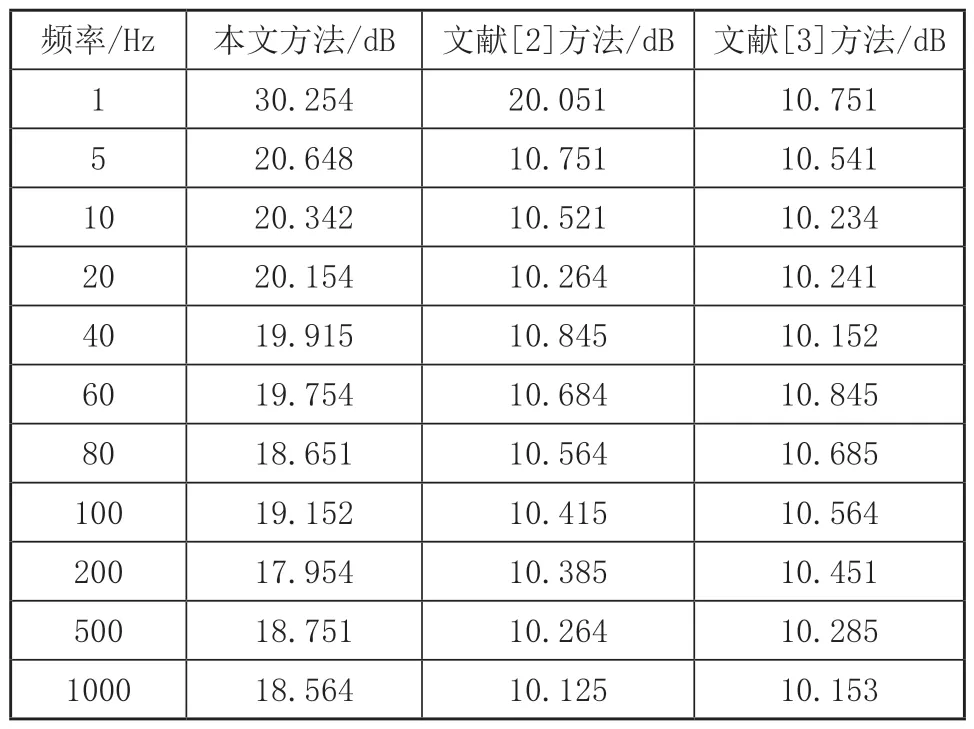
表1 降噪值對比
表1實驗結果可以看出,采用本文方法設計的PLC自動控制器在濾波前后可將信噪比顯著提升;而采用另兩種方法設計的控制器在濾波前后對于輸出結果信噪比提升幅度明顯低于本文方法。對比結果證明了本文方法設計的PLC自動控制器具有較高的抑制噪聲的能力,可以提升電動振動臺振動幅值的控制精度。本文方法可以顯著提升電動振動臺運行過程中的信噪比,避免電動振動臺運行過程中受到噪聲影響,可滿足振動控制的濾波性能。
設置線性掃頻作為掃頻模式,掃頻時間間隔以及頻率分別為2S以及1Hz/s,。采用本文方法設計的PID自動控制器控制電動振動臺輸出的加速度結果與標準加速度結果如圖7所示。
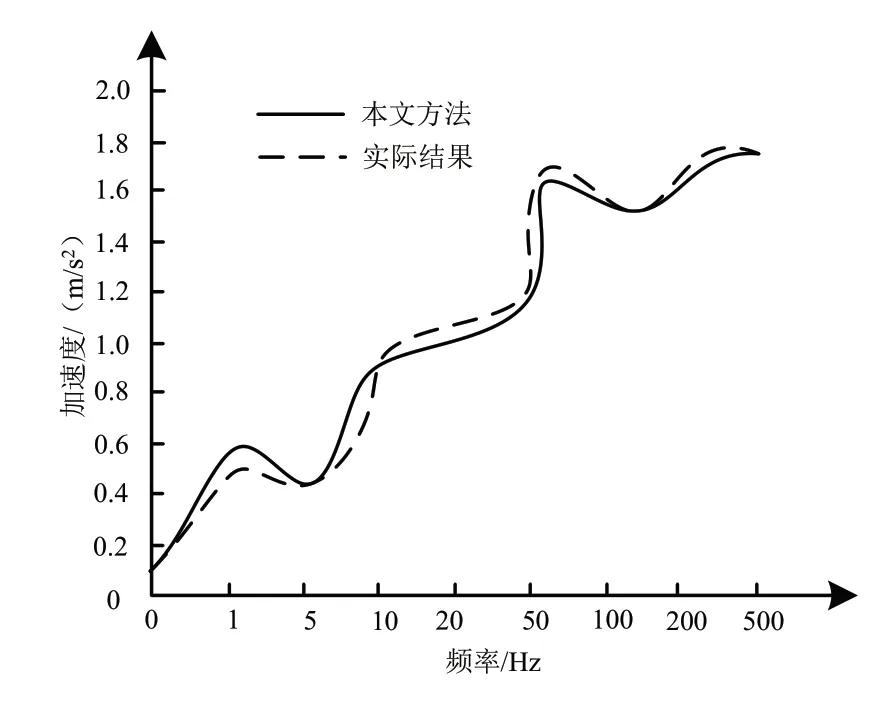
圖7 加速度控制結果
圖7實驗結果可以看出,采用本文方法設計的PLC自動控制器控制電動振動臺輸出的加速度結果與標準加速度結果相差較小,證明本文方法所設計的PLC自動控制器的控制效果較好。
統計本文方法設計的PLC自動控制器輸出的加速度誤差,將本文方法與文獻[2]方法以及文獻[3]方法對比,對比結果如圖8所示。
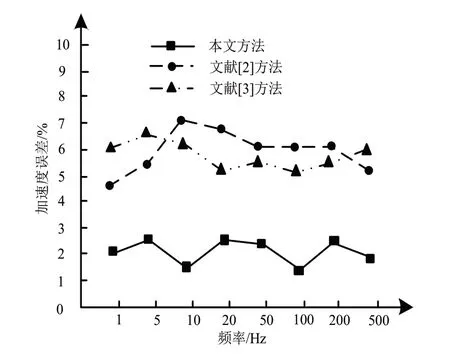
圖8 加速度誤差對比
圖8實驗結果可以看出,相比于另兩種方法,本文方法設計的PLC自動控制器具有性能穩定的特點,加速度誤差低于3%;另兩種方法設計的控制器控制電動振動臺的加速度誤差均高于4%,對比結果有效驗證本文方法設計的PLC自動控制器具有極高的控制性能。本文方法設計的PLC自動控制器加速度誤差遠低于GB/T13310-2007規定的低于10%的要求。
統計本文方法所設計的PLC自動控制器在不同振動測試情況下的控制器平均啟動時間,并將統計結果與另兩種方法對比,對比結果如圖9所示。
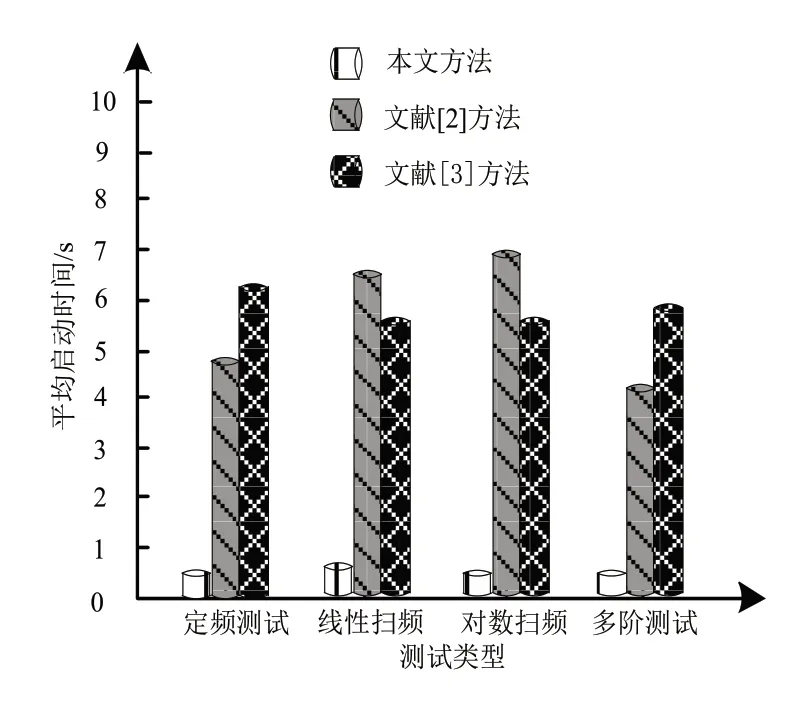
圖9 控制器平均啟動時間對比
分析圖9所示的對比結果可以看出,本文方法設計的PLC自動控制器的平均啟動時間低于1s;而另兩種方法設計的PLC自動控制器啟動時間均高于4s。對比結果驗證本文方法可在短時間內快速實現自動控制器的啟動,控制性能優越。本文方法設計的PLC自動控制器采用模塊化編程思想實現PLC控制程序的編程,控制器運行過程中可以直接調用子程序,提升了所設計自動控制器的運行效率,令控制器啟動時間大量縮短。
3 結語
本研究設計了一種建筑工程旋轉機械電動振動臺的PLC自動控制器,其具有較高的可靠性,能夠滿足電動振動臺對于建筑用旋轉機械應用的可靠性需求。所設計PLC自動控制器不僅可應用于建筑工程中的旋轉機械中,對于其它領域的旋轉機械同樣具有較高的應用性能,具有較高的使用價值以及推廣價值。
猜你喜歡
當代工人(2020年8期)2020-05-25 09:07:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識動漫(2016年8期)2016-07-29 20:40:09
Coco薇(2016年2期)2016-03-22 02:42:52
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
