多層穿梭車系統在自動化倉儲物流行業中的應用與研究
2021-02-24 10:13:04張可義劉利波
制造業自動化 2021年12期
徐 健,田 博,張可義,劉利波,李 順
(北自所(北京)科技發展有限公司,北京 100120)
0 引言
當前,自動化倉儲物流系統在部分行業的應用需求比以往有了很大改變,倉儲物流系統的應用特點已經從原有少品種大批量、低存取效率、無序化等簡單需求,向多品種小批量、高存取效率、有序化等復雜需求方向轉化,傳統以堆垛機為主體的自動化立體倉庫在這些行業已經無法滿足全部要求,而多層穿梭車系統以其高速的運行效率及卓越的吞吐量成為滿足此類應用需求的首選。該系統已在國外倉儲物流行業得到了大量應用,勝斐邇、瑞士格和德瑪泰克等國際知名的物流集成商可提供完整的多層穿梭車系統解決方案,但國內對該系統的開發和應用落后于國外,所以多層穿梭車系統的方案規劃設計、電控技術和管理調度技術等方面內容已成為國內眾多供應商要擴展和研發的重要方向。
1 多層穿梭車系統和主要設備
多層穿梭車系統是一種新型的倉儲模式,用于存取50kg以下的周轉箱或紙箱,作業效率比箱式堆垛機立體庫提升數倍,通常應用于150~1000循環/小時以上作業周轉需求的系統方案中。
系統主要由硬件設備系統和管理軟件系統兩部分組成,硬件設備主要由高層立庫貨架、高速穿梭車、提升機、庫端站臺和外設輸送系統組成;管理軟件系統主要由監控系統、調度系統、管理系統(WMS)和服務器系統組成。
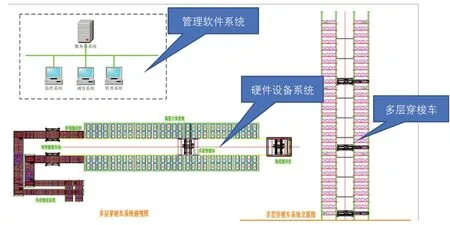
圖1 多層穿梭車系統組成示意圖
根據作業效率需求,系統每層配置一臺或多層共用一臺高速穿梭車,穿梭車向每層相接的庫端站臺取放貨物,再由高速提升機與庫端輸送站臺對接進行貨物周轉,替代了箱式堆垛機,完成周轉箱或紙箱的快速存取作業。高速提升機通常與“貨到人”系統對接,“貨到人”系統通常是具有訂單箱和周轉箱輸送的雙層輸送系統。多層穿梭車與“貨到人”系統共同完成訂單揀選作業。
目前,多層穿梭車系統以其高效的性能,被應用于電子、快遞和電商物流等特定行業中的貨物高速吞吐和訂單揀選等領域,系統通過計算機調度及信息管理軟件實現訂單處理,流程及波次控制,“貨到人”信息顯示,庫存管理等系統功能。多層穿梭車系統已形成了一套集自動化倉儲、排序和分揀于一體的復合型物流系統。
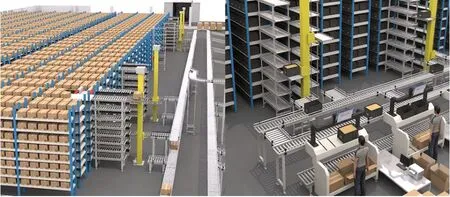
圖2 多層穿梭車及貨到人系統
1.1 高速穿梭車
高速穿梭車是整套自動化存儲系統的核心設備,它在貨架間的軌道上往復運行,通過單伸位或雙伸位貨叉存取貨位上的貨物,實現周轉箱或紙箱的出庫、入庫及搬庫作業。
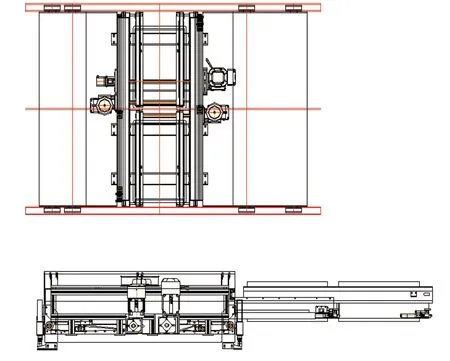
圖3 多層穿梭車機械結構示意圖
穿梭車具有水平運行和貨叉伸縮兩維動作,并通過交流或直流伺服電機驅動。系統通常采用可編程序控制器(PLC)作為主控器,完成設備動作邏輯、作業接受,作業步驟和故障報警等功能的單機控制。通過PLC或伺服驅動器進行高精度的速度和位置雙閉環控制,運行參數可達到行走高速300m/min,貨叉高速60m/min,加速度0.7~2.0m/s2,重復定位精度誤差為+-3mm。
穿梭車的作業指令由上位機調度系統下發,通過無線以太網通訊系統傳輸給穿梭車,由PLC電控系統按程序和流程順序執行。
1.2 高速提升機
高速提升機位于立體庫貨架的端部,與各貨架層的庫端輸送站臺相接,通過載貨臺上的輥道或皮帶同庫端輸送站臺接送貨物,并可在各設備層間往復運行,實現周轉箱或紙箱的出庫和入庫作業,完成貨物的快速轉運。高速提升機是多層穿梭車與外部輸送系統的連接樞紐,它的運行速度決定了整個系統的作業效率,其響應速度、定位精度和穩定性是系統性能的重要體現。
高速提升機的機械傳動機構設計改變了傳統的“鏈輪+鏈條”或“卷筒+鋼絲繩”的模式,進而采用“同步齒形帶機構”傳動,既提高了系統的穩定,也提高了系統的傳動效率。為達到較高的動態響應效果和運行速度參數,系統通過交流伺服電機驅動,通過伺服位置控制的方法實現垂直方向的高速高精度定位,進而縮短貨物搬運周期,提高系統運行效率。
除此之外,高速提升機還可以根據單位時間內貨物的周轉率設計1~3個輸送工位,即載貨臺一次可接駁多件貨物,通過這種方式可以大幅度提高提升機的作業效率。
1.3 庫端輸送站臺及周邊輸送機
庫端輸送站臺是穿梭車和高速提升機連接的紐帶,用于貨物的出入庫輸送和緩存,可應用輥道機或皮帶機等多種輸送形式,同層設備的分段數量與系統的輸送能力有關,需要與系統的工作節拍進行匹配。
周邊輸送機則與高速提升機對接,執行配送、分揀、返空箱等輸送流程,實現系統入庫、出庫和“貨到人”揀選等系統功能。周邊輸送機主要由鏈式機、皮帶機、輥道機、移載機和鏈板機等,根據系統的工藝流程、效率需要和作業功能對設備組成形式、數量和參數進行選取。
2 多層穿梭車系統的關鍵技術
2.1 應用虛擬現實仿真技術對多層穿梭車系統設計方案進行仿真驗證
多層穿梭車系統在方案規劃中,有幾方面的難題需要解決:其一,貨架儲位、設備布局與數量、系統運行參數配置等如何達到最優;其二,所設計物流系統的投入與產出比是否滿足預算,即收益率是否在合理的范圍內;其三,所設計物流系統的運行節拍是否與外設產線或分揀站的工作節拍相匹配;其四,如何計算出所設計物流系統的利用率,為后續的改進或增產提供數據支持等。
為了解決上述問題,國內有很多學者應用排隊理論等算法對多層穿梭車系統的貨架設計、儲位設計和設備數量等參數進行研究,雖然諸多研究取得了豐碩的成果,但是所研究的算法及結果并不容易直接應用于系統方案設計和設備選型中,所以近些年來,通常通過虛擬現實仿真軟件對多層穿梭車物流系統的設備布局、工藝流程、流量參數和生產節拍等重要參數進行仿真驗證,以得出較為優化的系統方案和設備配置,也可以直觀的體現出系統工作效率和設備的利用率。
仿真驗證可分為前期、中期和后期三個實施階段。前期包括基本數據采集和物流規劃分析兩個環節,在基本數據采集環節,需要對系統的物料、庫存、物流流量和約束條件進行收集,匯總基本的規劃參數,以得到系統的基礎輸入數據;在物流規劃分析環節,需要分析所規劃方案的物流模式、庫房布置、物流流程、貨物載具、物流設備類型,以得到系統的物流流程模型信息。
中期包括仿真驗證和分析優化兩個環節,在仿真驗證環節,需要完成模型和流程仿真、數據收集與輸入、模型校驗、仿真運行和得出仿真結果;在分析和優化環節,需要完成流量、庫容、運行周期和設備利用率等關鍵系統參數的結果分析,對其中的問題點進行識別,進而分析出優化方向。
后期為方案結果輸出環節,通過仿真驗證,分析各優化方向產生的結果,并分析各關鍵參數,得出滿足設計要求的仿真結果,如果各優化方向均不能滿足設計要求,則需要重新更改原系統設計方案。
通過虛擬現實仿真技術可以對系統全流程規劃設計方案進行仿真,驗證其是否滿足生產和物流的應用需求。仿真驗證可以對各環節及流程銜接進行校驗,可以直觀的得到系統效率和利用率等關鍵數據,可有效的避免方案設計失敗或投入產出比不合理等情況出現。
2.2 電控技術
控制系統是多層穿梭車系統的關鍵組成部分,是系統作業能力水平的重要體現。控制系統主要采用可編程序控制器PLC作為控制器(部分廠商應用單片機),結合分布式I/O系統、變頻驅動系統、傳感器系統、信息識別系統和位置檢測系統,實現對多層穿梭車系統設備的單機運行控制,完成與上位機調度管理系統的控制對接和狀態顯示。
多層穿梭車系統的優勢在于具有較高的作業效率,而作業效率又由穿梭車和高速提升機的運行效率決定,所以如何提高穿梭車和提升機的運行效率是電控系統所要解決的關鍵問題。
對于穿梭車和提升機來說,其速度控制方法很大程度上決定了設備的運行效率,在設備和貨物所能承受的范圍內,“S”型變加速控制方法通過對加速度求導計算,進行無極調試,可以得到較高的加速度上限,為此將變加速控制方法應用于單機設備的運動控制中,可以得到較高的加速度和動態響應性能,進而縮短設備的運行時間,提升作業效率。
變加速控制的應用方法是,將設備的運行速度分為7個階段進行控制,分別應用變加速、勻加速和勻速三種算法公式,對各速度控制過程進行分解計算,以求解各運行時刻的速度給定值,如圖4所示,圖中vm為最高運行速度,am為最大加速度,Jm為最大加速的變化率。
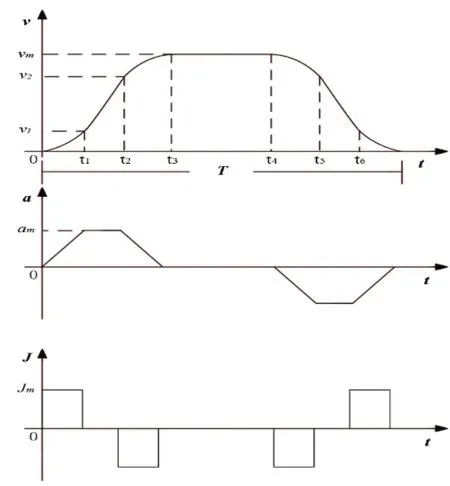
圖4 變加速運動速度控制曲線示意圖
根據設備與目標位置的距離S不同,將速度曲線的應用情況進行劃分,得到速度曲線的形式有拋物線、不完全拋物線、拋物線-直線三種表現形式。
根據速度曲線的變化過程,整理出設備運行過程中速度和運行位移的方程如下:
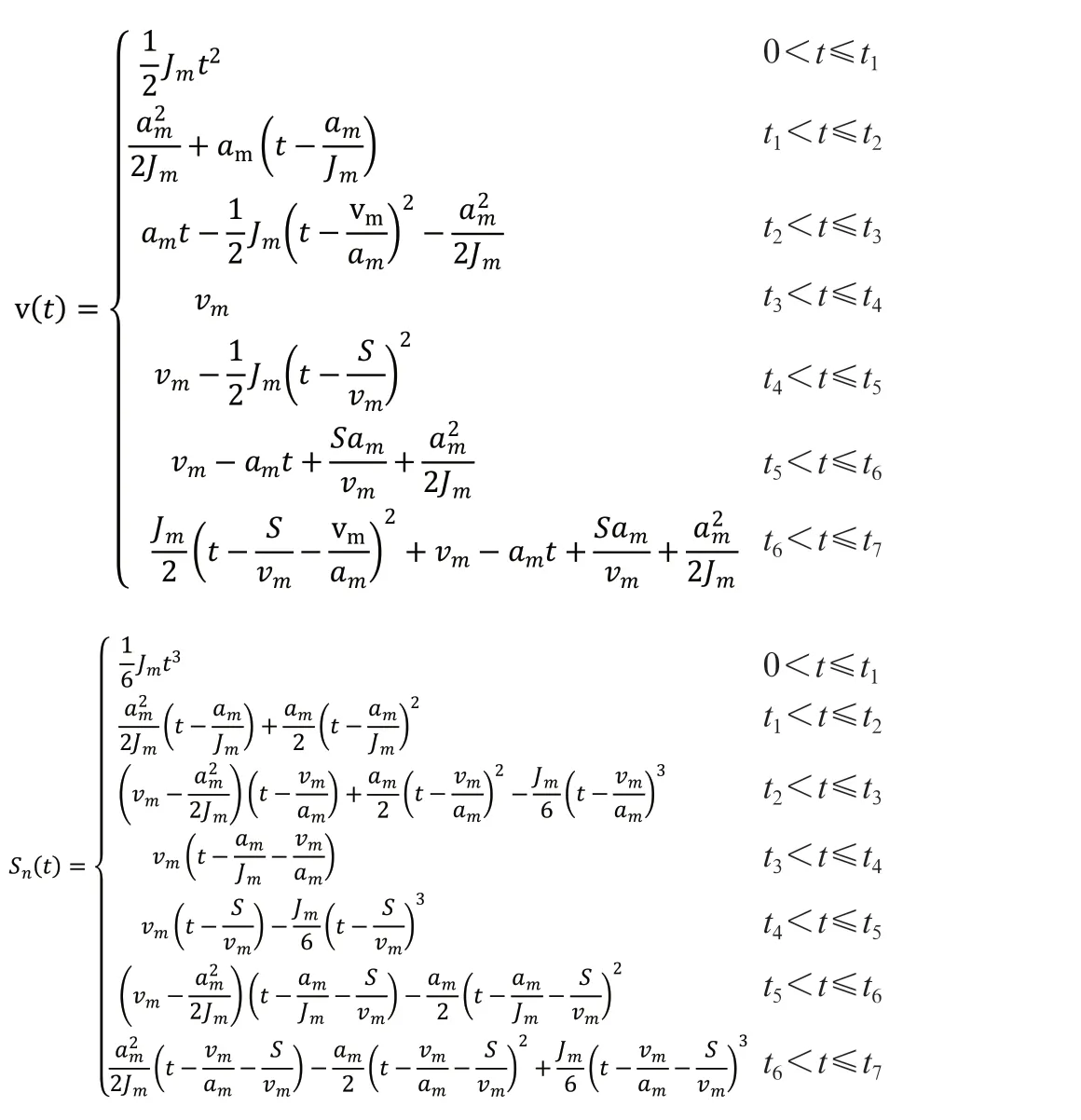
結合系統的速度參數和目的位移,通過分段速度和位移公式,可以得出各時刻系統的輸出速度v(t)和運行位移sn(t),輸出速度將作為PLC的主給定由控制程序計算并通過變頻器輸出,驅動電機運行,使穿梭車得到“S”型變加速速度曲線。
為了保證系統的穩定性,穿梭車或提升機控制系統通常采用速度環和位置環雙閉環控制方式。
速度環通常通過固定于電機驅動軸處的增量編碼器進行檢測,PLC采集電機運行時編碼器的信號變化量,計算出反饋速度,并實時與系統給定速度進行校驗,作為系統速度微調或報警的閉環檢測,系統將通過速度差補的方式保證速度環的平穩輸出,當速度環有較大差異時,系統將報警停車。
位置環通常采用激光測距儀或BPS條碼定位系統進行檢測,PLC通過總線端口連接傳感器,實時讀取位置變化。當系統定位運行時,PLC實時計算運行給定的位置變化量,并與位置傳感器反饋的位置變化量進行比較,當位置變化存在較小差異時,系統將通過速度控制變化進行位置補充;當差異較大時,系統將報警停車。
通過雙閉環控制方式使穿梭車和提升機的運行更加穩定可靠,在確保系統穩定的同時也增加了系統安全性。
對周邊輸送機控制系統則以PLC作為主控器,以工業現場總線為基礎,采用分布式控制方式,對現場的物流設備進行信號采集和動作邏輯控制,實現周轉箱和訂單箱的輸送。
2.3 管理和調度系統
管理和調度系統是多層穿梭車系統的運行核心,它向各子系統和設備發出指令,調度全系統完成作業,其功能示意如圖5所示。管理和調度系統包括物流執行層和控制層兩部分,其中物流執行層為倉儲管理系統(WMS),其功能是對密集存儲系統進行入出庫作業管理、庫存管理、與ERP或MES進行任務和資源對接等;物流控制層為倉庫控制調度系統(WCS)等同級別的調度系統,其功能是接送系統任務,通過算法程序進行作業分解,將作業下發給PLC等工業控制器,進而控制執行設備,并完成全任務流程的作業接口等。
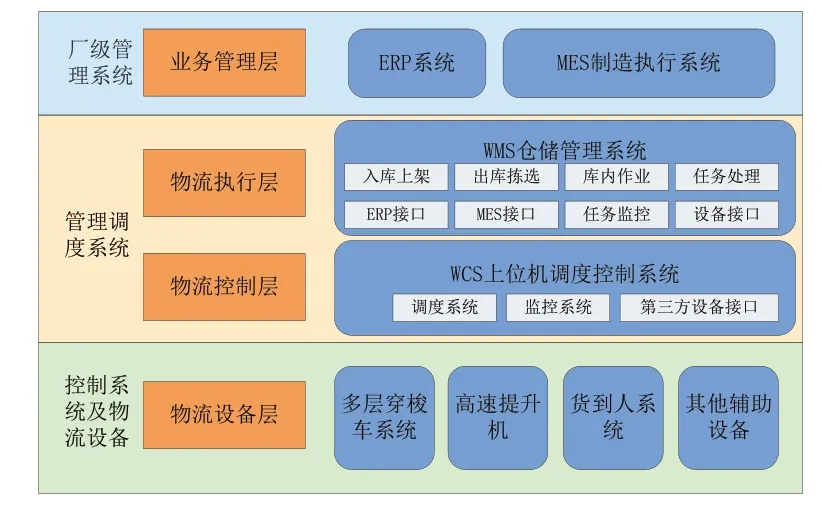
圖5 管理調度系統功能示意圖
調度系統的合理性和智能水平是決定系統運行效率的重要因素,在保證系統運行功能的同時,調度系統需要融合“排隊理論”、“遺傳算法”、“K-means聚類算法”等理論算法,實現零件合箱、儲位分配和揀選合單等智能調度方法。
由于多層穿梭車系統具有較高的物料搬運效率,可應用于出庫緩存等自動化物流中轉環節,用于解決物料出庫的排序問題,在提供高速搬運的同時,使系統具有按訂單順序執行的出庫分揀功能。
3 多層穿梭車系統的研究實踐
針對多層穿梭車系統的開發需求,為完成電控系統研發和信息管理系統開發,建立了多層穿梭車系統實驗平臺,如圖6所示。

圖6 多層穿梭車系統實驗平臺
實驗平臺系統包括機械設備、電控系統、信息管理和調度系統。
機械設備組成包括料箱貨架、一臺多層穿梭車、一臺雙工位穿梭車換層提升機、兩臺雙工位料箱高速提升機和一套“貨到人”箱式揀選系統。
電控系統研發內容包括“貨到人”揀選系統、提升機和穿梭車電控系統的電氣設計、程序開發和單機調試。
信息管理系統實現了倉儲管理、訂單分揀、數據管理等功能,調度系統實現系統流程控制、作業控制和設備狀態監控等功能。
系統安裝調試完成后,進行了系統功能與效率測試,該實驗平臺系統的循環作業能力為122件/小時,為單臺雙工穿梭車的作業能力,高速雙工位提升機作業效率為375件/小時,如果再增加兩臺多層穿梭車,那么系統循環作業能力可以提高的366件/小時,滿足較高作業效率自動化存儲系統的要求。
通過該實驗平臺實現了多層穿梭車系統的設計功能,形成了標準的電控系統方法,測試并檢驗了系統的作業能力,解決了多層穿梭車系統的設計與應用問題。
4 結語
本文通過對多層穿梭車系統的介紹、分析和研究,總結了系統規劃設計驗證、電氣控制和管理調度等關鍵技術的應用方法。通過實驗平臺完成了多層穿梭車系統的控制系統研發、信息系統開發和功能測試,并得出了系統效率測試結果。
多層穿梭車系統具有較高作業效率和吞吐量,具有靈活的作業處理能力,便于系統擴展,結合“貨到人”系統可滿足小批量、高存取效率、有序化作業等的應用需求,系統在自動化倉儲物流行業將有更為廣闊的發展前景。
猜你喜歡
甘肅教育(2020年14期)2020-09-11 07:57:42
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
物流技術與應用(2019年8期)2019-09-04 03:29:56
汽車觀察(2018年12期)2018-12-26 01:05:44
故事大王(2016年7期)2016-09-22 17:30:08
時代英語·高二(2015年1期)2015-03-16 00:08:11
現代企業(2015年2期)2015-02-28 18:45:09
中國衛生(2014年11期)2014-11-12 13:11:32
商界(2014年12期)2014-04-29 00:44:03
兒童故事畫報(2013年3期)2013-06-24 05:40:30
