基于TLS的靶板穿孔特征識別提取方法
2021-02-23 09:27:08何性順蘇健軍段奇三
兵器裝備工程學報 2021年1期
關鍵詞:特征
何性順,蘇健軍,段奇三
(1.西安近代化學研究所,西安 710065; 2.北京地景科技有限公司,北京 100088)
三維激光掃描技術是一種非接觸式的自動測量技術,它通過激光測量物體的角度和距離,能夠快速獲得物體表面的高精度三維信息,精度可達毫米級且不受光線等因素的影響[1-3]。三維掃描技術在越來越多的領域獲得了廣泛的應用,大量用于建筑變形監測、古建筑保護、產品質量監控、工程測量等領域,具有高精度、高密度、高效率等優點[4]。隨著三維激光技術的廣泛應用,許多學者對其進行一系列相關的研究和應用。
三維激光掃描技術高效、高精度的優點對于開展軍工領域的部分研究工作具有借鑒作用和應用潛力。破片毀傷在戰斗部毀傷效應中有其重要的地位,不僅表現為對目標的硬殺傷,在防空反導方面也有其他毀傷效應(超壓、熱、聲、電磁、窒息等)無法替代的作用,因此獲取戰斗部破片參數非常必要。戰斗部靜爆后的破片群速度及分布,是評價導彈及常規彈丸等戰斗部的作戰性能的重要指標。通過在戰斗部周圍設置靶板來記錄爆炸后穿孔的形態、位置及拋射方向,飛散程度等。在進行靶板孔洞特征統計時需要采用人工統計的方法,用肉眼進行靶板上孔洞和凹坑等特征的識別和統計,效率低下且準確度也無法達到要求,原始數據不易保存。
張弛等利用三維激光掃描技術對臨近爆破施工隧道進行變形監測,比較多時期提取的點云切片數據的重心坐標,重心矩等參數分析形變量[5]。施富強等利用三維激光掃描技術建立爆破數字化模型,同時實現爆破中的爆破設計,效果分析,質量控制的數字化[6]。喻戰江等采用三維激光掃描技術獲取爆堆三維數字化幾何要素、進而提取表面塊度三維幾何尺寸并且通過統計分析方法分級歸類,實現爆破塊度三維分級[7]。相關研究人員利用三維激光技術在民用領域取得了豐富的研究成果,受此啟發,本項目開始探索該技術在軍工領域的應用研究。
本研究采用三維激光掃描技術,利用獲得的靶板點云數據提取穿孔特征,特征多為孔洞及類似孔洞的凹坑等特征,三維點云孔洞邊界的提取算法主要分為兩類:一類是利用點云數據的網格結構提取邊界;另一類是利用點云數據的鄰域幾何信息提取邊界[8-11]。現有算法主要針對散亂點云提取孔洞邊界,不能完全滿足本文的靶板穿孔特征提取需求。參照已有的點云孔洞提取方法,依據原始點云特征與掃描點云陣列分布特點,本文提出采用點間距變化閾值來判斷相關特征,結合不同穿孔幾何特征進行分類判別,有效提取靶板穿孔及凹坑等特征,通過計算特征的位置、面積、飛散角等數值評估爆炸范圍及威力。
1 原始點云數據預處理
掃描選用Faro X130相位式激光掃描儀獲取靶板爆破現場三維數據,相位式激光掃描儀能夠快速獲取靶板及其周邊環境場景各個物體的三維數據,掃描原始點云呈陣列式分布,首先對原始點云進行預處理操作,預處理包括點云配準與點云噪聲剔除。
首先要在爆破前對戰斗部和靶板進行第一次掃描,獲得戰斗部和靶板點云,爆破后第二次掃描靶板。將兩次掃描得到的點云通過標靶紙進行粗配準后再進行精配準,精配準采用ICP配準法[12-13]。從而將爆破前后兩點云配準到一個坐標系下,以便計算爆破中心和靶板中心從而計算爆破飛散角。
點云去噪常用方法有:高斯濾波、幾何濾波、雙邊濾波等[14-15]。目的是為了消除具有邊緣特征的高頻幾何信息的點,保留主體點云。由于原始靶板點云為有序點云,雙邊濾波將距離和空間結構結合去噪,是通過取鄰近采樣點的加權平均來修正當前采樣點的位置,從而達到濾波效果;同時也會有選擇地剔除部分與當前采樣點“差異”較大的相鄰采樣點,從而達到保持原特征的目的。可直接適用于有序點云,效果較好,因此采用此方法對原始點云進行噪聲剔除處理。
2 靶板穿孔特征識別
相位式激光掃描儀的掃描原始點云是有序點云,距離掃描中心越遠,其點云相鄰點間距越大。激光掃描儀掃描到靶板的孔洞或者邊界,一般返回結果為空點,即三軸坐標值均為零,或者不同于目標周圍正常表面點,也就是距離突變點。本文研究的靶板爆破特征主要包含孔洞、凹坑、裂隙3種特征。其中孔洞是爆破穿透靶板形成的中空孔洞,在點云中體現為內含空點的封閉圖形。如圖1(a)所示;凹坑是指爆破未穿透靶板形成,沿爆破方向產生的形變,雖并未穿透,但凹坑內點云相鄰點間距與周邊區域點間距有明顯變化。其中凹坑典型效果如圖1(b)所示;裂隙是指因爆破導致靶板斷裂形成的狹長孔洞,如圖1(c)所示。
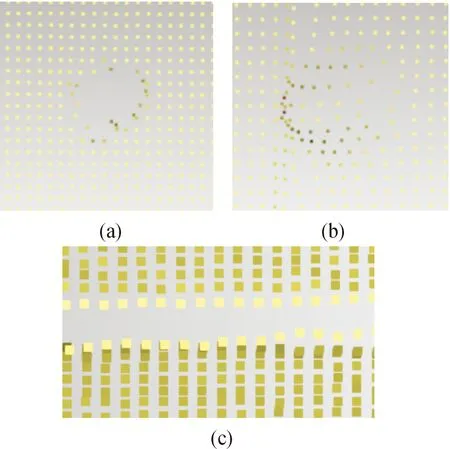
圖1 爆破特征示意圖
2.1 靶板穿孔特征識別
因爆破形成的孔洞會沿爆破方向產生變形。在激光掃描點云中,靶板孔洞具有邊界效應。突變部位與正常掃描點間距遠大于正常掃描點的平均點間距。通過查找空點,其坐標為(0,0,0)的鄰接點,判斷是否存在距離突變,便可以識別出孔洞的邊界。對于凹坑,其內部雖不為空點但仍有點間距的突變,剖面圖如圖2。如果能識別出這些距離突變,便能得到孔洞和凹坑位置。
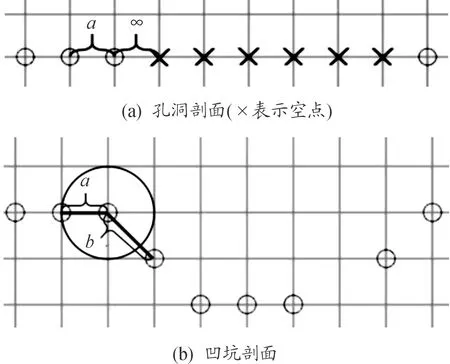
圖2 典型爆破特征點云分布示意圖

因掃描距離、入射角度及靶板的長度、弧度、凹坑等因素都會使點云間距發生改變,為了消除這些因素對閾值判斷的影響,當前點鄰域平均點間距計算時,需剔除空點及突變點。設橫向點與縱向點間距閾值trow和tcol,其計算表達式為:
(1)
(2)
其中,ε為平均點間距閾值系數。
2.2 靶板穿孔特征分類
通過計算得到的每個點在鄰域內橫向和縱向的平均距離與間距閾值進行比較,通過點間距離突變閾值篩選后,將篩選出的點集中兩兩相鄰的點不重復的存入一個單獨的列表中,形成一個特征。所有特征中不僅包含上文所提到的3種特征對象,由于靶板外邊框與外界空點也有極大距離突變,也會被識別為一個單獨的特征。通過規定單個特征點云點個數大小將點數過多的特征去除。進而達到去除靶板外邊框的效果。經過實驗規定點個數在3~300時可包含所有特征對象而將靶板外邊框去除。
在特征列表中去除裂隙后,便只包含孔洞和凹坑。依據其特征,只需判斷特征內是否有與空點相鄰接的點。若鄰域內與空點鄰接則為孔洞。若不與空點鄰接,則為凹坑。并將識別到的孔洞存入初始孔洞點集。凹坑存入初始凹坑點集。識別過程具體算法流程如圖3所示。

圖3 特征分類流程框圖
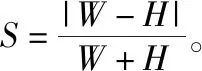
2.3 靶板穿孔特征提取
在識別出的孔洞中,因掃描密度不足,會導致兩個或以上孔洞被識別成同一孔洞。此時便需要分別提取其邊界,獲得準確的孔洞邊界和孔洞個數。識別方法如下:以與空點相鄰的點是邊界點為篩選條件,刪除孔洞點集中與空點不相鄰的點以獲得邊界點集。如果邊界點集中的點所包圍的空點存在孤點,不能相互聯通,則認為該孔洞由多個孔洞組成,并進行進一步劃分,如圖4所示。凹坑的邊界只取點集中最外圍的點作為邊界,如圖5所示。
圖4 孔洞及凹坑邊界提取示意圖
3 實例分析
使用Faro X130三維激光掃描儀對某次戰斗部靜爆試驗前后時期的靶板進行掃描獲得原始靶板點云數據,靶板采用1.5 m×2 m×6 mm規格的Q235鋼板,按照4行3列豎立鋪設于距爆心5 m處的圓弧,用于攔截戰斗部爆炸后形成的破片,如圖5所示。試驗后靶板實物如圖6所示。其中點云掃描點密度約為7.6 mm/10.0 m。
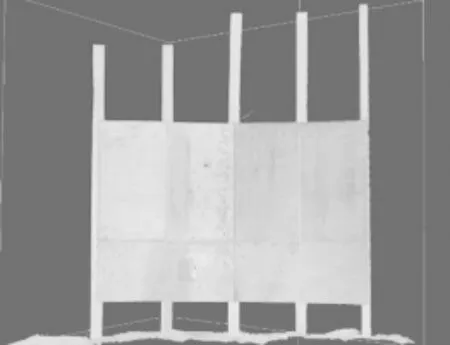
圖5 原始靶板掃描點云正視圖

圖6 試驗后靶板實物圖(局部放大)
點間距閾值系數ε、鄰域大小k,寬高比大小Sh系數對精度影響較明顯,所以需要通過反復試驗測定其精確范圍。點間距閾值系數ε會影響算法的運行時間和篩選精度,選擇更合適的閾值系數能在盡量短的時間內更為精確的確定孔洞點。通過測試發現ε小于1時會將點云間距的自然波動識別為突變。1.2~2.0之間運行時間變化不大。因此選定ε=1.7。k的大小決定了需要重復遍歷的點數的個數,對算法時間及結果都存在較大影響,由于k主要影響凹坑識別個數的多少,對于孔洞識別基本無影響。所以本文優先考慮時間長短作為評判標準,選定k=5。依據算法寬高比S越小,孔洞越接近圓形,反之則越狹長。其對運行時間無影響,Sh=0.6為最佳值,超過0.6則會將裂隙識別為孔洞。特征點個數規定在3~300區間范圍內,
對靶板進行特征提取操作,獲得全部靶板特征,特征整體識別效果見圖7所示,可知靶板共識別218個特征,紅色為孔洞,綠色為凹坑,其中孔洞120個,凹坑98個,裂隙不計入結果。對特征進行放大操作,如圖8所示,可以看到特征邊界均被很好地提取了出來,由于掃描密度不夠導致的孔洞粘連其邊界也被很好地提取了出來。通過輸出孔洞可以獲得每一個特征的幾何信息,見表1。通過以往的人工統計手段,孔洞為124個,凹坑103個,可見該方法對靶板穿孔和凹坑的統計成功率均超過了95%,滿足使用需求,并且通過圖9可以方便地得出戰斗部產品的飛散角等重要參數。
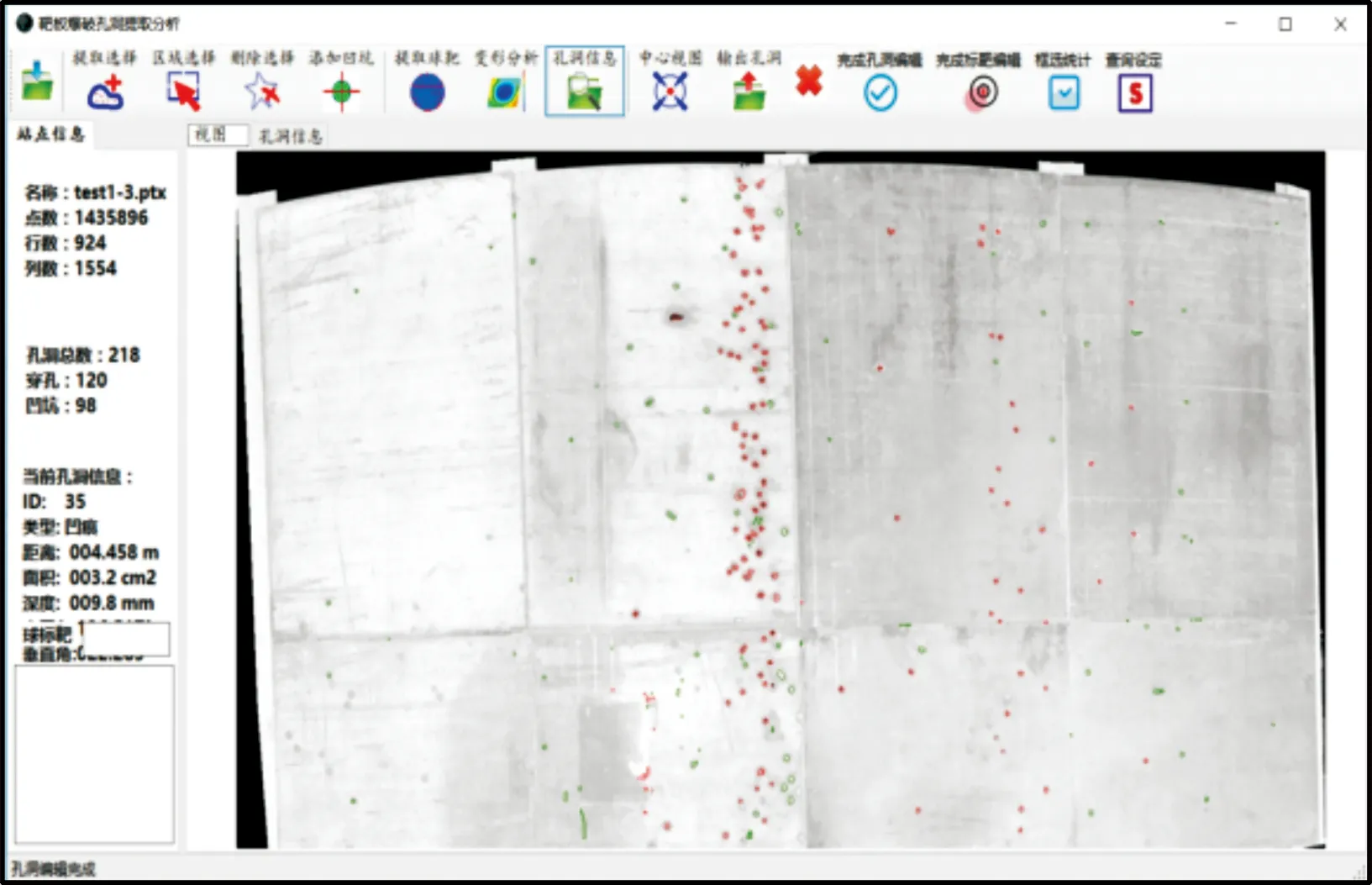
圖7 靶板特征整體識別效果示意圖
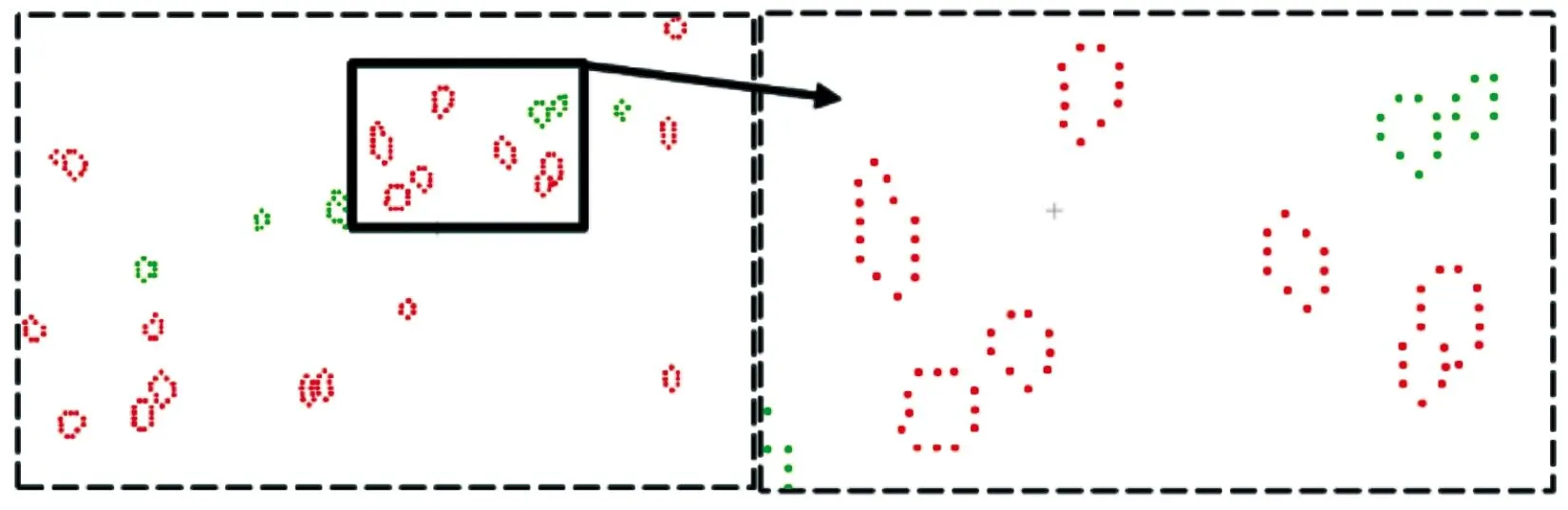
圖8 靶板特征邊界提取效果示意圖
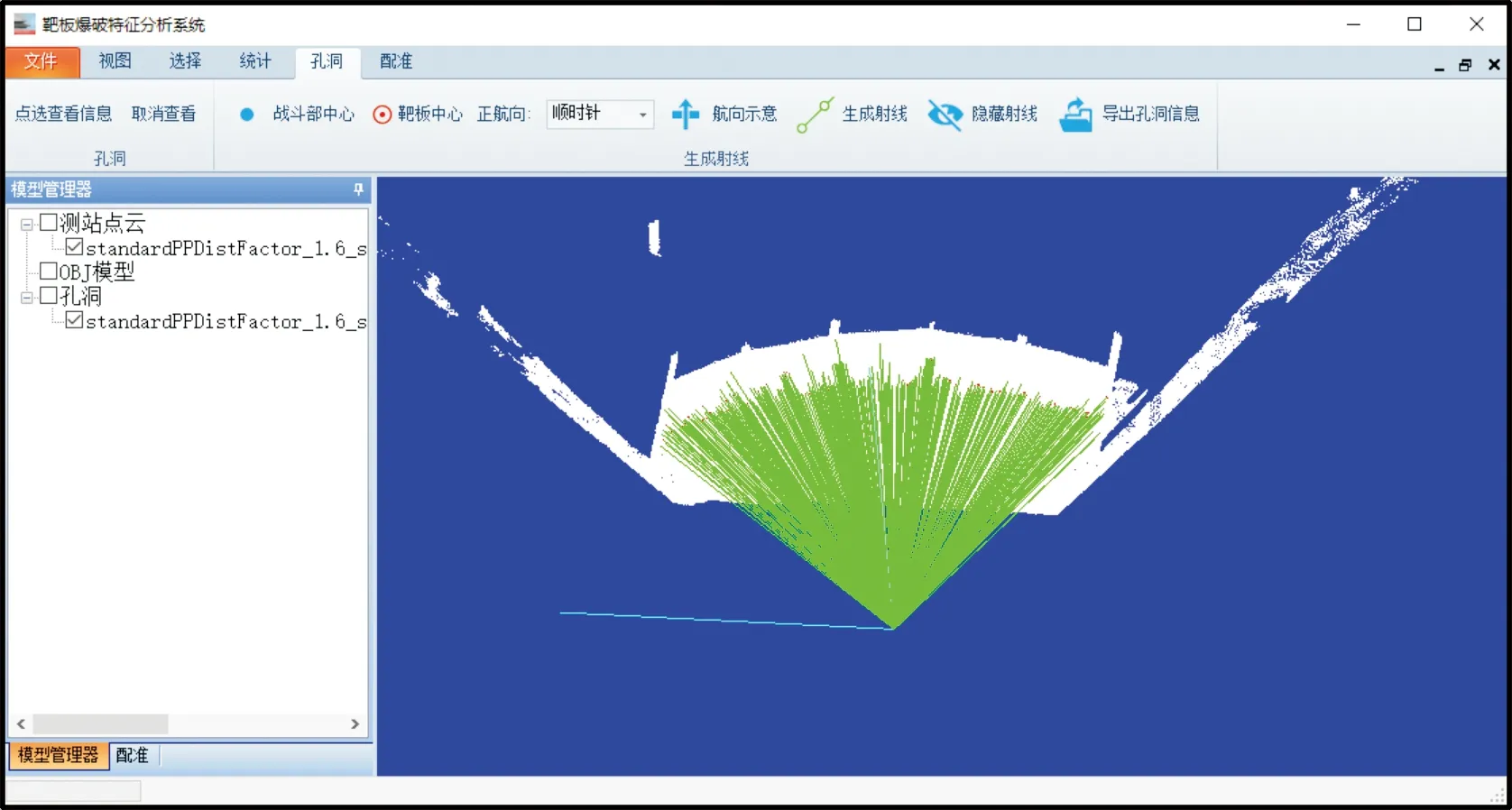
圖9 戰斗部中心與靶板穿孔中心連線的射線圖
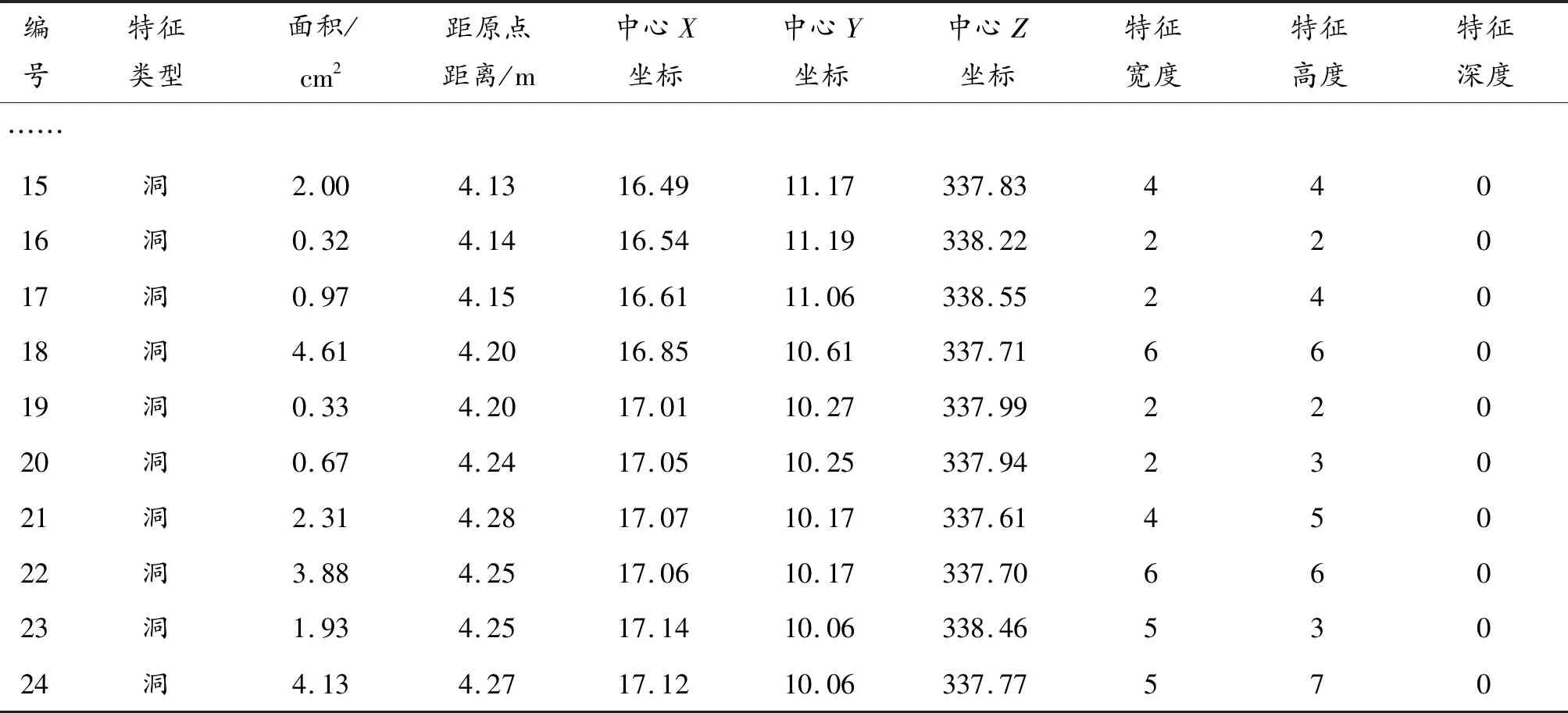
表1 靶板穿孔特征信息統計表
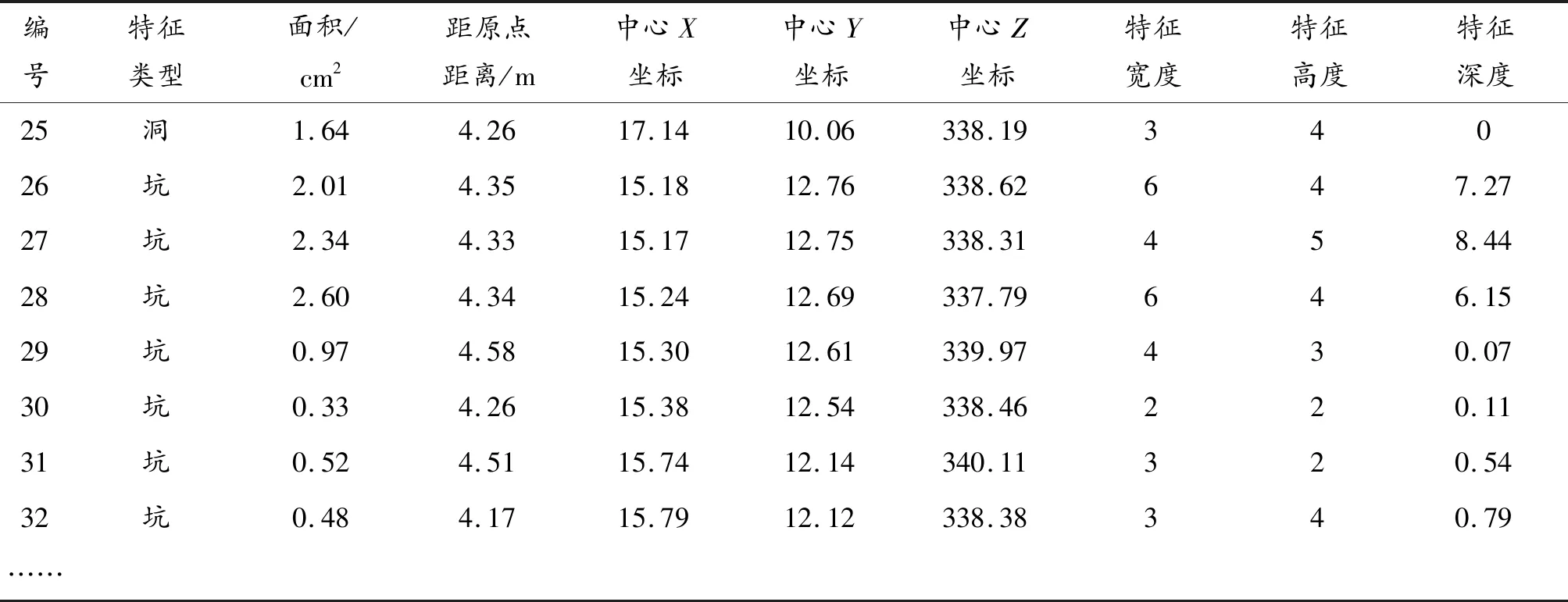
續表(表1)
4 結論
針對相位式三維激光掃描儀獲取靶板點云進行穿孔特征提取,依據特征與掃描點云陣列分布特點,提出采用點間距變化閾值判斷相關特征,用自適應點距判斷方法,結合不同爆破特征進行分類判別,有效提取靶板孔洞及凹坑等目標,通過實際數據驗證,提出的算法提取爆破穿孔特征精度高,有效輸出爆破孔洞的位置、形狀及拋射方向,可為爆破效果評估提供參考。
基于點間距變化閾值來判斷特征點提取孔洞邊界的方法在精度方面相較其他方法具有很大優勢,針對有序點云不需要構建空間索引,速度更快。在接下來的工作中,將著重研究如何實現多個點云孔洞同時識別,進一步縮短提取時間,提高效率,結合實際,使其適用范圍更廣。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化(高中版.高考數學)(2022年3期)2022-04-26 14:04:16
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38
