基于干濕模態試驗的運載器振型分析
2021-02-23 09:27:02李盼菲馮彩紅張紅星
兵器裝備工程學報 2021年1期
關鍵詞:模態
李盼菲,馮彩紅,張紅星
(中國船舶重工集團公司第七一三研究所, 鄭州 450000)
導彈在水下發射、出水航行過程中的結構動力學環境極其復雜。目前有限元分析技術以及邊界元流固耦合分析技術不斷發展,能夠得到一定精度的模態參數,但水下導彈運載器結構復雜,且發射過程中對各項參數要求極其精密。工程應用中,需要根據具體工況,通過改變設計使物體的固有頻率避開某些特定頻率來提高安全系數。由于仿真計算過程中,仿真參數的設置與實際工程應用存在一定偏差,導致仿真結果與試驗得到的模態特性仍然存在一定差異,因此,需要進行模態試驗來得到相關模態參數。焦安超等[1]通過“天宮一號”飛行器的模態試驗,得到的實驗數據與仿真數據相差不大,并能夠根據仿真數據來選擇模態試驗的激勵點位置等參數。孫海文等[2]在探空火箭上的模態試驗同樣印證了這一結論。但水下發射狀態與陸上有很大不同,結構在水下運動時,附連水的質量會影響結構的動力學特性,同時水的阻尼效應與空氣也有較大差別。結構在水中運動時液體對結構產生兩種效應,一是附加在結構表面的附加水質量,二是粘性阻滯效應。前者增大了結構的運動質量,使得水中結構的固有頻率降低;后者阻礙結構運動,增大了阻尼系數[3]。附加質量能夠進行估算,而干、濕模態阻尼有較強的非線性,只有依靠試驗才能掌握阻尼特性[4-7]。要研究水的附加阻尼,需對結構進行干、濕兩種模態試驗。通過試驗能夠比較分析干、濕模態阻尼特性的差別,便于進行載荷分析。王在鐸等[8]使用圓筒縮比模型,進行水下濕模態試驗,研究剛體在水下平動和轉動的阻尼比,并得到了一階彎曲的附加質量系數,具有一定的參考意義,但試驗未考慮到水深的影響,且試驗獲取的數據信噪比較低,這可能是因為加速度傳感器的性能參數以及水下密封手段所致。導彈發射過程中的動態響應數據十分重要,但目前國內外針對水下發射整個出水過程的模態研究大多處于仿真階段,缺少試驗數據與其相互補充和驗證。文章搭建了模態試驗系統,分別做了空氣和淺水中的模態試驗,得到了大量試驗數據,研究了不同水深對模態試驗結果的影響,為后續研究水下發射的動力學特性提供了有效參考。
1 試驗原理
本試驗采用了耐壓殼體結構來模擬運載器,作為模態試驗件。該運載器主要由頭部、中段、尾部組成,如圖1所示。

圖1 試驗件安裝環境
空氣中,運載器采用吊掛方式,在節點位置使用彈性繩將兩端吊起,使其處于水平自由狀態。此種安裝方式可以補償重力對其基頻特性的影響,使試驗結果更加趨近于真實狀態[9]。水下模態試驗中,由于浮力大于運載器的重力,使用彈性繩將運載器與配重塊連接起來,使配重塊沉于水底,運載器懸浮水中。空氣中模態試驗采用力錘和激振器兩種激振方式。力錘試驗時,使用力錘敲擊運載器表面特定位置使其產生振動,粘貼于運載器表面的加速度傳感器實時測得結構相應信號,并傳入LMS數據采集系統。同時,粘貼于力錘上的力傳感器實時將力錘的沖擊信號傳入數據采集系統。激振器試驗時,信號發生器發出一個特定的激振源信號給功率放大器,將此信號放大之后給激振器,激振器將此信號加載到運載器的激勵點上,粘貼于運載器表面的加速度傳感器實時測得結構相應信號并將其傳入采集系統。通過Test.lab模態分析軟件確定運載器的傳遞特性,選擇合適的算法得到模態相關參數。試驗原理如圖2所示。
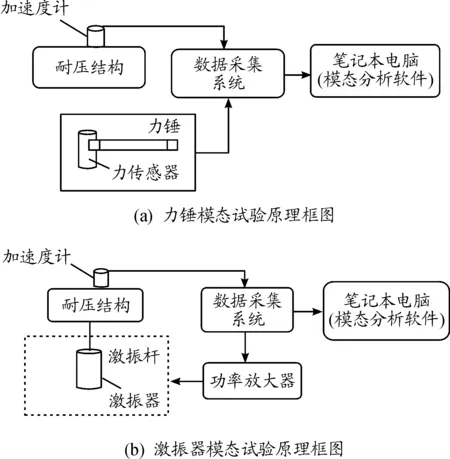
圖2 模態試驗原理框圖
2 試驗系統建模
2.1 建立運載器試驗模型
定義從運載器頭部看,最低點為第Ⅰ象限,逆時針每隔90°依次定義為第Ⅱ、第Ⅲ和第Ⅳ象限如圖3(a)所示。選擇運載器頭部頂點為坐標原點,X軸沿耐壓結構軸線指向尾部,第Ⅲ象限為Y軸,第Ⅱ象限為Z軸,X軸、Y軸和Z軸滿足右手法則。根據測試點選擇原則,結合模態數值仿真結果,在運載器殼體結構表面布置5圈和頭部頂點,每圈沿圓周均布4個測點(依次為Ⅰ、Ⅱ、Ⅲ、Ⅳ象限),共計21個測點,如圖3(b)所示。各站位距離運載器頭部的距離見表1,站位編號規則為:第0圈站位為頭部頂點,測量點編號為G0001;第一圈站位從底部Ⅰ象限開始逆時針分別為G0101~G0104;第二圈站位從底部Ⅰ象限開始逆時針分別為G0201~G0204;…;第五圈站位從底部Ⅰ象限開始逆時針分別為G0501~G0504。
2.2 建立激振模型
試驗中,G0001測點位于頭部頂點,使用2個加速度傳感器,分別測量y向和z向的加速度。其他測點的方向為:第一象限為-y,第二象限為+z,第三象限為+y,第四象限為-z。
按照測點布置方案布置好測點之后,使用力錘分別取G0001測點x方向,G0202測點,G0203測點,G0302測點,G0303測點敲擊,對比其頻響函數,最終確定當敲擊點為第2圈時,其效果最好。
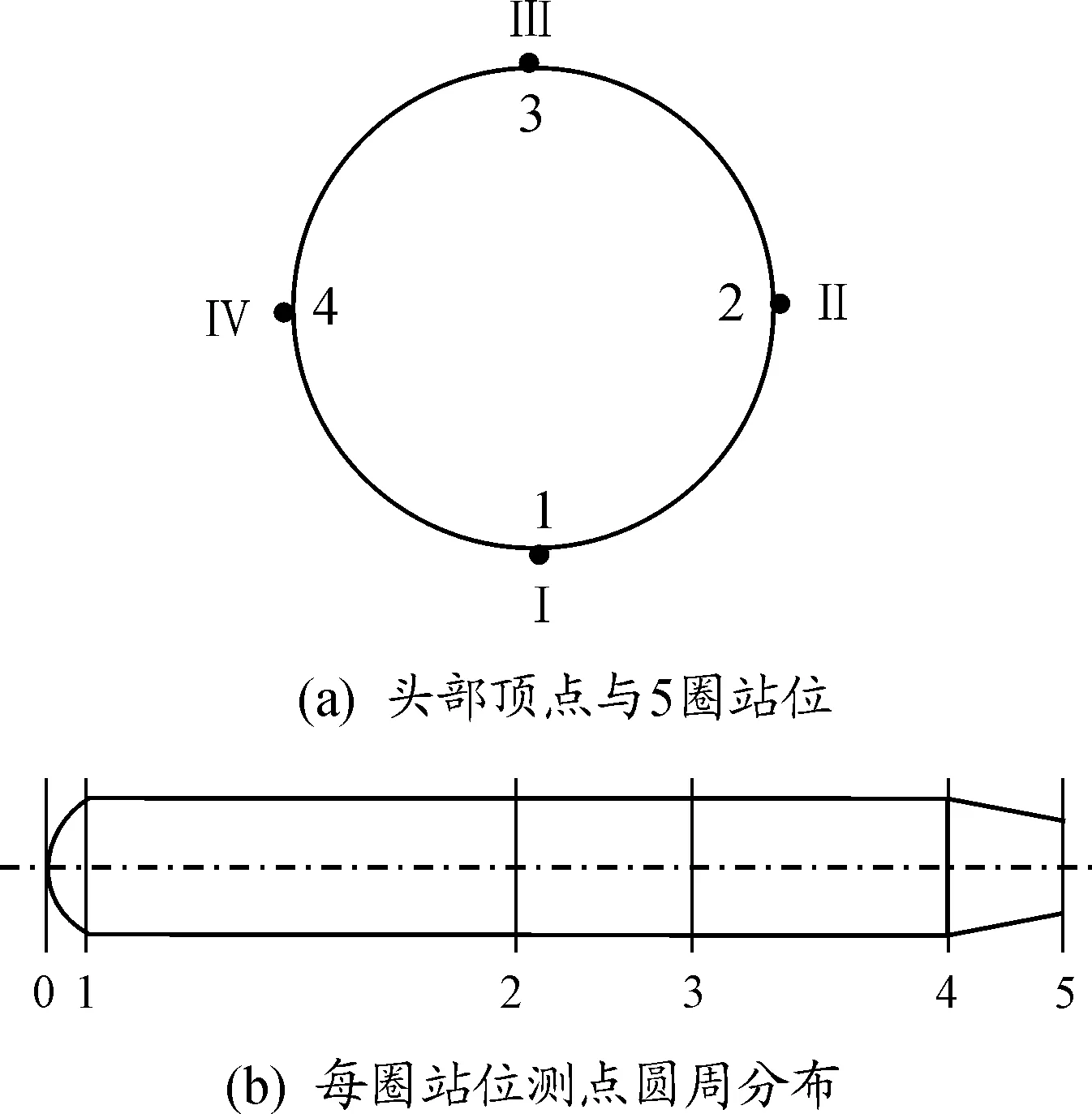
圖3 測點建模位置圖
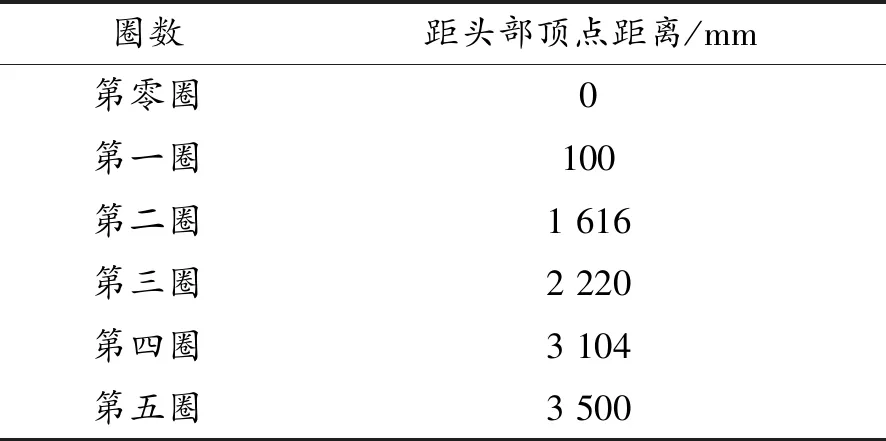
表1 不同圈的位置分布
空氣中模態試驗時,激振器垂直放置于地面,從下往上垂直抵于耐壓結構第二圈表面,故激振點為G0201,+Y方向。水下模態試驗時,由于激振器不能放置于水下,將激振器倒置懸掛,垂直于水面,從上往下抵于耐壓結構表面第二圈,激振點為G0203,-Y方向。
3 試驗數據分析
本試驗分別做了空氣中模態試驗和水下模態試驗,并將試驗數據與仿真數據作了對比。
3.1 模態參數識別方法
運載器受到激振源的激振信號產生多點振動加速度,通過LMS系統建立起輸入激振與多點振動加速度響應的對應關系,從而得到多組頻響函數,使用正交多項式曲線擬合法對所測頻響函數進行曲線擬合,并用抗干擾能力強的PolyMax 算法,識別出各階模態頻率對應的模態參數[10-13]。對于識別出的頻率中,若有兩個頻率非常接近,首先觀察振型動畫,若其振型相似,則計算這兩階模態之間的MAC值;若MAC值大于0.85,則認為這兩階模態是同一階模態。此時,再通過擬合的頻響函數虛部圖和相干函數,確定虛部圖中峰值較大且對應的相干函數值為1或者接近1的頻率點為真實模態,剔除另外一個虛假模態,最終確定合理的模態參數值。
3.2 空氣中模態試驗力錘與激振器試驗結果分析
空氣中模態試驗使用力錘激勵和激振器激勵2種激勵方式,其試驗結果見表2與圖4所示。
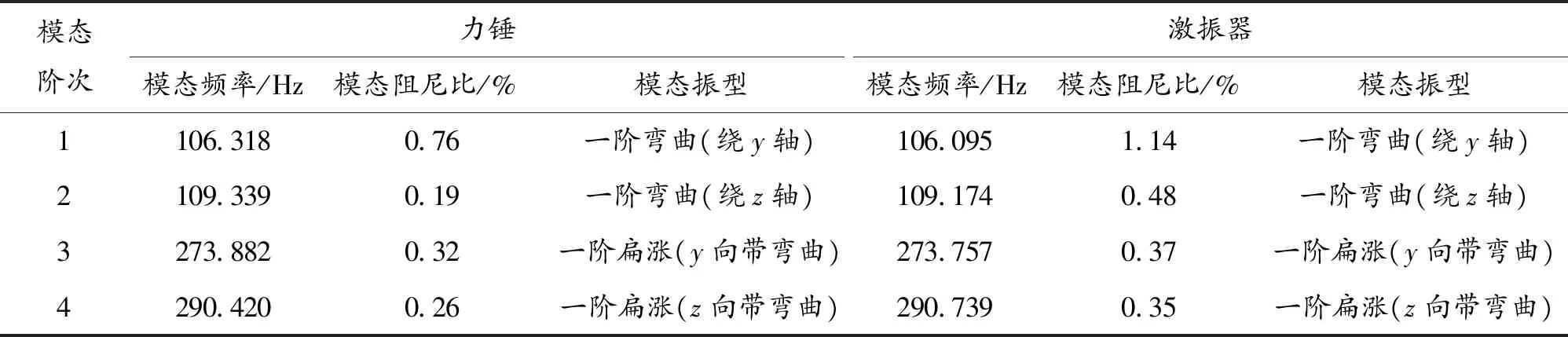
表2 力錘激勵與激振器激勵結果比較
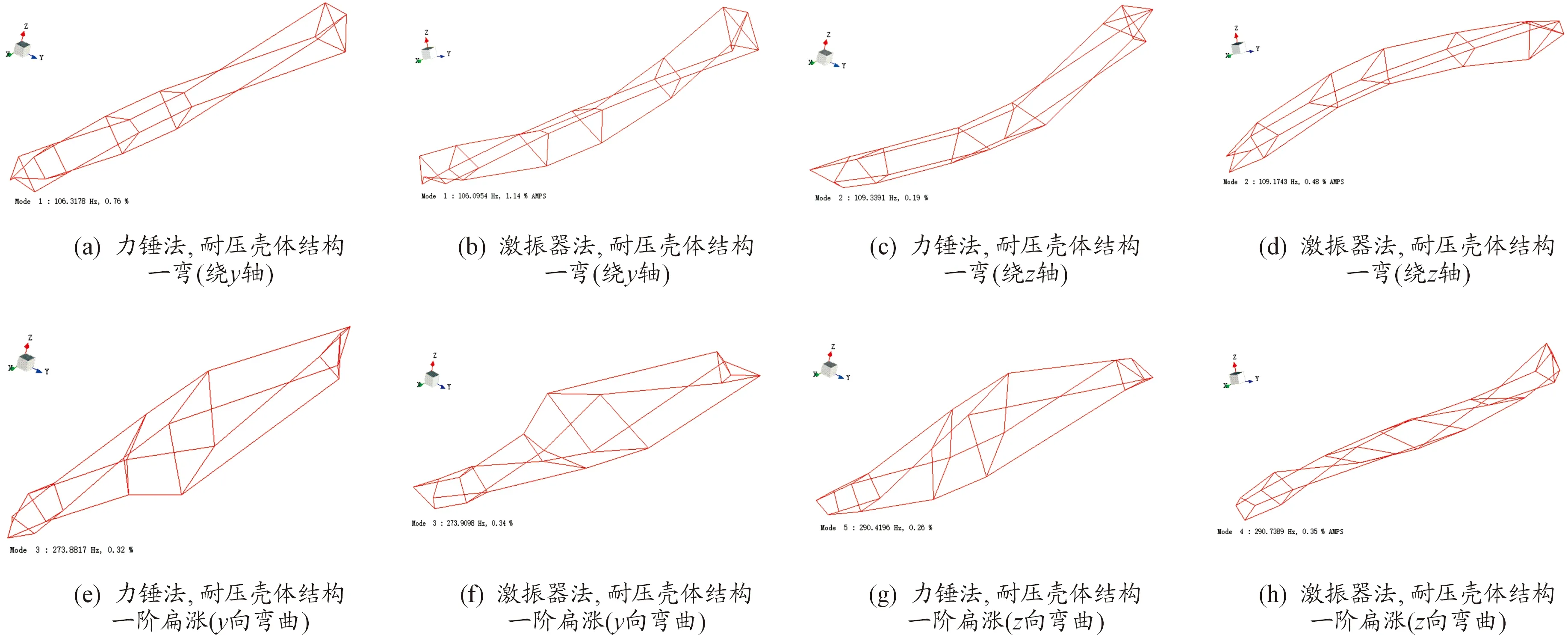
圖4 空氣中模態試驗振型
根據表2與圖4的結果可以看出,在空氣中進行模態試驗時,使用力錘和激振器進行激振,其低階模態頻率與阻尼比基本一致,振型差別不大。可以認為模態試驗中,激振源選擇合適的情況下,激振方式對模態參數影響不大。
3.3 水下模態試驗結果分析
試驗中,規定運載器殼體第三象限距離水面的高度為水深值。由于在水下試驗,力錘敲擊會帶起周圍水波振動,從而影響到運載器的自由狀態,因此,使用激振器激勵。
在測點G0203的-Y方向用激振器進行激勵,分別進行了0、50 mm、80 mm、100 mm和150 mm水深試驗。對這5組數據進行分析,識別出的模態參數見表3。
根據表3,將各階模態頻率和阻尼比數據隨水深變化關系繪制關系圖如圖5所示。
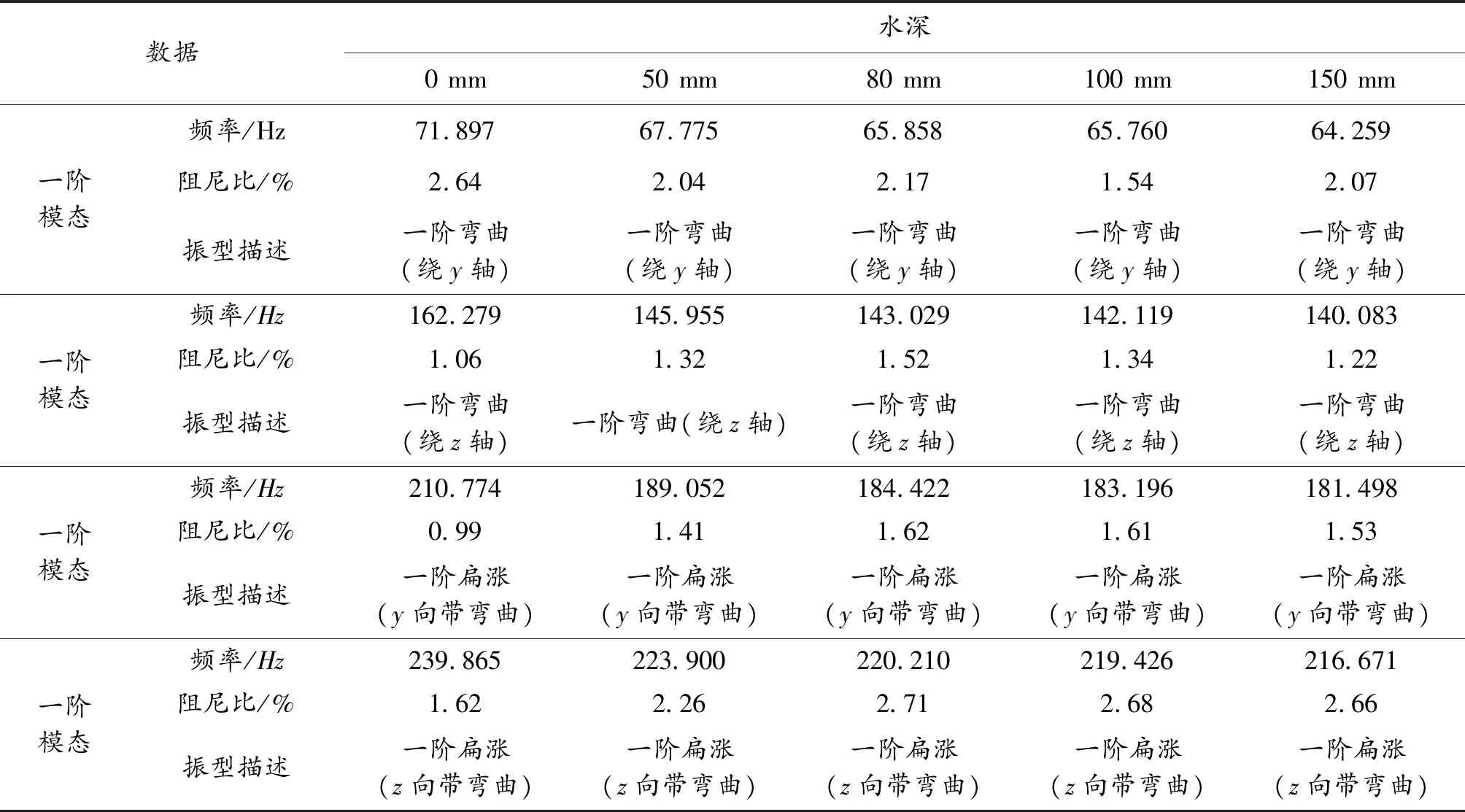
表3 水下模態不同水深試驗數據
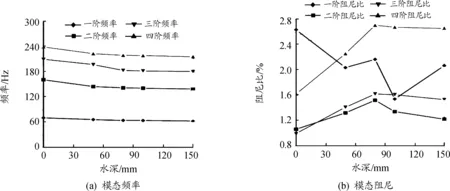
圖5 模態數據隨水深變化曲線
根據表3和圖5可以看出,運載器的各階模態頻率隨著水深增加而逐漸減小。從水深0 mm到50 mm時,模態頻率衰減較快,水深從50 mm到150 mm時模態頻率衰減較慢。而模態阻尼比隨水深變化沒有明顯規律。模態振型隨水深變化一致性較好。劉慶茂[14]認為,附連水的質量是導致物體在水中固有頻率下降的主要因素,且附連水質量越大,固有頻率下降越多。根據張成等[15]的附連水質量計算方法,水深會影響附連水的質量,彈體在深水域的附加質量比淺水域大得多。本試驗中,隨著水深增加,附連水的質量也在增加,模態頻率隨之減小。若水深增加到一定程度,則試驗狀態趨近于無限流域,附連水的質量趨近于定值,則模態頻率趨近于穩定值。
3.4 模態試驗數據與仿真數據對比
試驗前對該運載器做了干濕模態仿真,數值仿真數據如表4所示。
由于空氣對運載器的附加質量和阻尼比均很小,所以將空氣中模態試驗數據與干模態仿真數據作比較,可以看出,干模態仿真數據與實驗數據的各階模態頻率相差不大,均在7%以內,各階振型基本一致,阻尼比相差不大。此結論與目前國內外大量科研工作者通過不同試驗件模態試驗所得到的結果基本一致。
將水下模態試驗數據與濕模態仿真數據做對比,可以看出仿真得到的各階模態頻率與水下模態試驗得到的各階模態頻率相差比較大,這是因為試驗時水深度有限,而仿真是在無限流域中進行的。根據上節得出的結論,水的深度會直接影響到模態頻率,且水越深模態頻率越小并最終趨于定值。可以認為,仿真中無限流域的濕模態頻率即為水下模態試驗隨水深而最終趨近的定值。例如本試驗件的濕模態仿真結果中,一階模態頻率為57.2 Hz,而水下模態試驗中水深為150 mm時,一階模態頻率為64.259 Hz,若水深繼續增加,試驗數據將會趨近57.2 Hz。
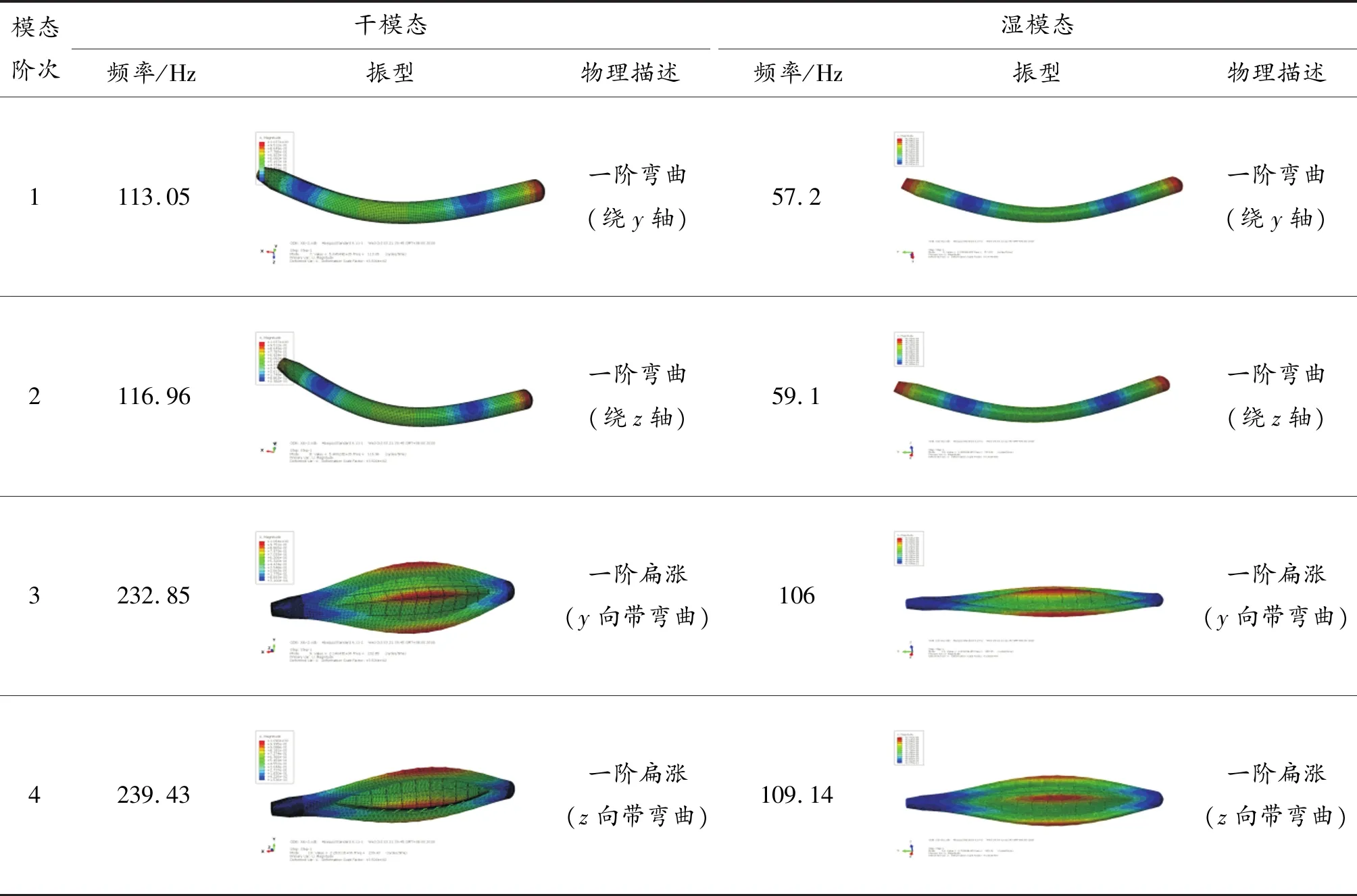
表4 模態仿真頻率與振型數據
4 結論
通過多組不同狀態下的模態試驗,并將模態試驗結果與仿真數據作對比分析,得出重要結論:① 使用力錘激振與激振器激振所得結果差別不大,即模態試驗結果與激振方式關系不大;② 水下模態試驗時,不同水深對于模態頻率有重大影響。隨水深增加,模態頻率逐漸減小,且減小的速度變慢,并趨近于定值;③ 干模態仿真結果與試驗結果偏差不大,濕模態偏差很大,仿真時需考慮自由面效應;④ 試驗件在空氣中和水中模態頻率相差很大,不能用干模態數據代替濕模態試驗結果。
猜你喜歡
成都信息工程大學學報(2022年4期)2022-11-18 07:31:14
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:12
工程與建設(2019年1期)2019-09-03 01:12:12
廣州大學學報(自然科學版)(2016年2期)2017-01-15 13:43:00
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
振動工程學報(2014年4期)2014-03-01 01:15:31
電影新作(2014年1期)2014-02-27 09:07:36
