采用電動缸的火炮隨動系統位置控制研究
2021-02-23 09:27:08靳小軍
兵器裝備工程學報 2021年1期
胡 鑫,趙 昕,李 偉,靳小軍
(西北機電工程研究所,陜西 咸陽 712099)
電動缸是將伺服電機、減速機和絲杠集成于一體的模塊化產品,它將伺服電機的旋轉運動轉化為絲杠推桿的直線運動,具有傳動效率高、定位精度高、響應快、結構簡單、占用空間小、維護方便、壽命長、環境適應性強等優點[1-2],近幾年在航空航天、武器裝備等領域獲得了越來越多的關注和應用。為了合理利用炮塔空間,簡化結構設計,某大口徑火炮高低隨動系統采用電動缸作為傳動機構。
對于電動缸伺服系統的位置控制,目前已經開展了大量研究。張愛龍等[3]在電動缸位移和力伺服系統中采用帶前饋的PID控制器,獲得了較好的跟蹤精度。徐永利等[4]將基于模糊PID參數整定的力/位混合控制方法應用于基于電動缸的重力補償控制中,獲得了穩定的重力補償精度。秦幸妮等[5]將自抗擾控制技術應用在某艦炮電動缸伺服系統中,跟傳統PID控制相比,提高了伺服系統的響應速度,減小了定位和跟蹤誤差。段學超等[6]在巨型射電天文望遠鏡的設計中,采用帶前饋的數字伺服濾波器實現了電動缸的高精度軌跡跟蹤控制。陳國迎等[7]在轉向臺架加載系統的研究中采用PID 力閉環控制和串聯校正方法使電動伺服系統加載力能快速跟蹤目標值,同時減小擾動下多余力的影響。曾從吉等[8]將智能分區PID算法應用于電動缸伺服系統中,減小了系統的穩態誤差[8]。史成城等[9]在電動缸控制系統中采用遺傳算法對PID參數進行整定,獲得了較好的控制效果。李木國等[10]采用模糊PID和超前補償控制策略,減小了電動缸推桿在往復運動過程中由于電機頻繁正反轉帶來的相位延遲和幅值誤差。
本文針對采用電動缸作為傳動機構的某大口徑火炮高低隨動系統的位置控制器進行研究,建立了火炮身管的運動學模型和動力學模型,提出了一種變系數誤差平方根和帶前饋的PID分段控制策略,應用于火炮高低隨動系統的位置控制器設計,有效解決了由于電動缸帶來的速比非線性導致隨動系統快速性和精度之間難以匹配的問題,具有較好的工程適用性。
1 高低隨動系統建模
某大口徑火炮高低隨動系統采用電動缸作為傳動機構,電動缸的一端與火炮搖架鉸接,另一端與火炮座圈鉸接,其簡化的結構示意圖如圖1。
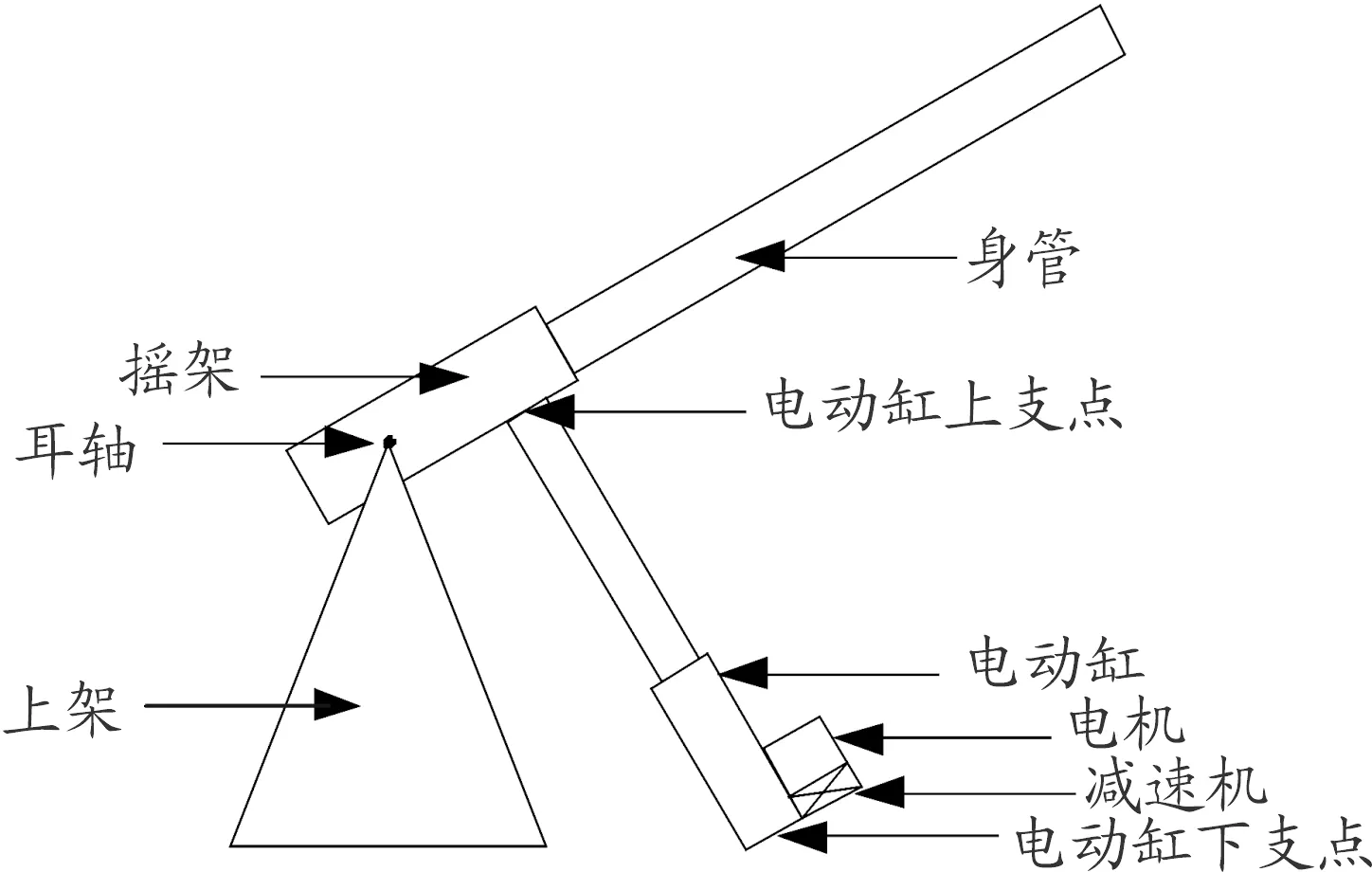
圖1 高低隨動系統結構示意圖
1.1 高低隨動系統運動學建模
根據圖1建立火炮身管的運動學簡圖,如圖2。圖2中,o為過耳軸(火炮身管俯仰運動的回轉中心)的鉛垂線與過電動缸下支點的水平線的交點,l1為耳軸到電動缸下支點的距離(m),l2為耳軸到電動缸上支點的距離(m),l3為電動缸伸出后的總長度(m),l0為電動缸伸出前的最小長度(m),θ為耳軸與電動缸下支點連線跟火炮身管之間的夾角(rad)。
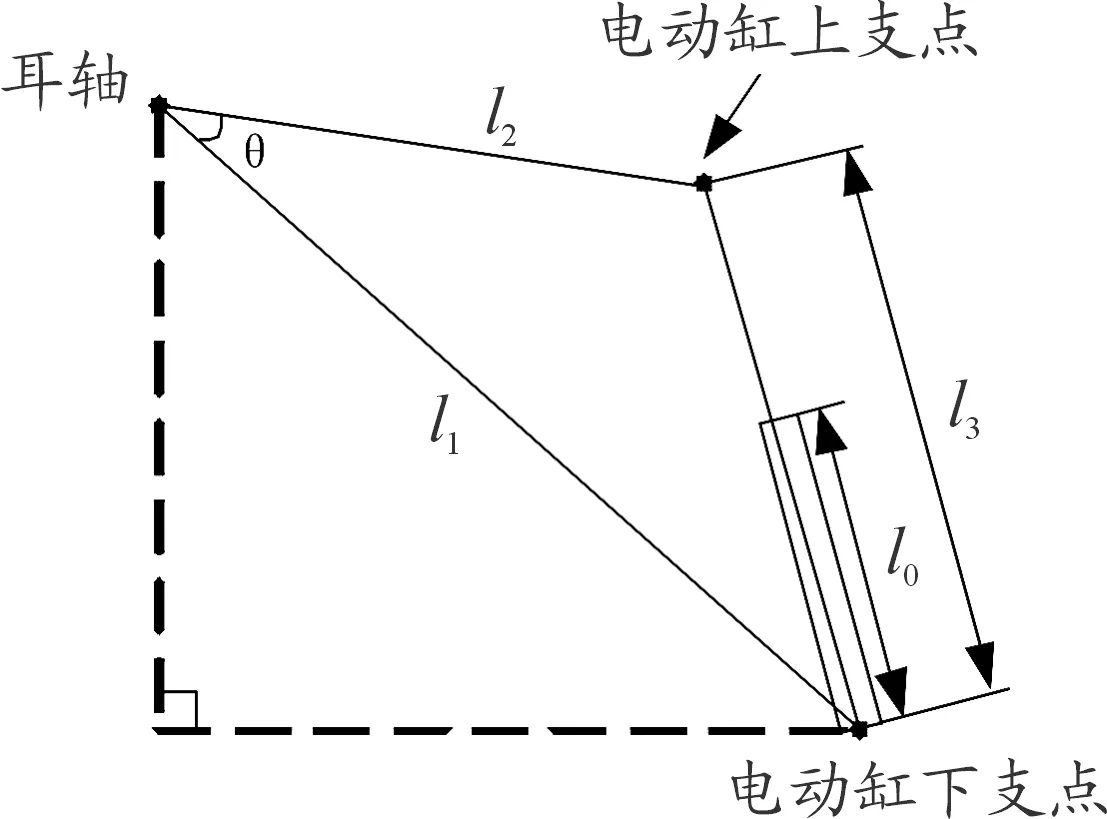
圖2 火炮身管運動學簡圖
假設電動缸中絲杠伸出的線速度為v(m/s),絲杠的導程為s(m),電動缸中減速機的減速比為i1,電機轉速為n(r/min),電機角速度為ωm(rad/s),則有:
(1)
l3=l0+vt
(2)
根據圖2對火炮身管進行運動學分析,得到:
(3)
(4)
將式(4)兩邊對t求導,得到:
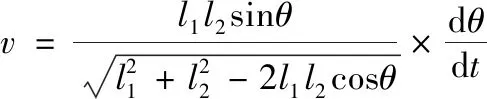
(5)
將式(1)代入式(5),得到:
(6)
1.2 高低隨動系統動力學建模
根據圖1建立火炮身管的動力學簡圖,如圖3。圖3中,Fg為電動缸絲杠伸出的力(N),F1為電動缸絲杠伸出的力在垂直于耳軸到電動缸上支點連線上的分量(N),β為電動缸上支點與下支點連線跟火炮身管之間的夾角(rad),γ為Fg跟火炮身管之間的夾角(rad),TL為火炮身管的不平衡力矩(N·m)。
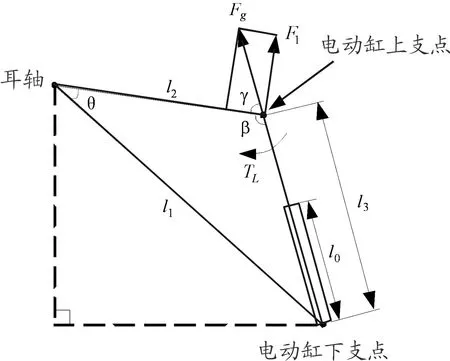
圖3 火炮身管動力學簡圖
假設電機的力矩系數為Kt(N·m/A),電機的q軸電流為iq(A),電動缸中減速機的效率為η1,電動缸中絲杠的效率為η2,電機軸輸出的扭矩為Tm(N·m),絲杠輸出的扭矩為Tg(N·m),火炮身管的轉動慣量為J1(kg·m2),電機轉子的轉動慣量為J2(kg·m2),電機轉子的轉動慣量折算到負載側的等效轉動慣量為J3(kg·m2),忽略電動缸中減速機和絲杠的轉動慣量影響,則有:
Tg=Tmi1η1=Ktiqi1η1
(7)
Fg=Tg2πη2s=Ktiqi1η12πη2s
(8)
J3=J2i1
(9)
圖3中,根據余弦定理有:

(10)
根據正弦定理有:
(11)
(12)
根據圖3可知:
F1=Fgsinγ=Fgsin(π-β)=Kciq
(13)
式(13)中:
假設身管為剛體,根據剛體定軸轉動定律可知:
(14)
(15)
其中:BM為粘滯摩擦因數(N·m/(rad/s))。根據式(15)可知,火炮身管角加速度與電機電流之間為非線性關系。
2 位置控制器設計
誤差平方根和帶前饋的PID分段控制策略既有效利用了系統的加減速能力,保證了隨動系統的快速性,又具有良好的跟蹤性能,因此在高炮隨動系統的位置控制中獲得了廣泛的應用,其基本原理為:根據位置誤差的大小將系統分為線性區和非線性區,在線性區采用帶前饋的PID控制,保證系統具有良好的跟蹤性能,在非線性區采用誤差平方根控制,盡量減小系統的制動段長度,保證隨動系統的快速性。在非線性區采用誤差平方根控制的條件包括[11]:系統具有優良的速度跟蹤性能,速度環滯后小;系統能提供恒定的角加速度。
本文研究的大口徑火炮高低隨動系統采用了永磁同步電機和全數字伺服驅動技術,具有良好的速度跟蹤性能,滿足采用誤差平方根控制的條件一,但是由于其采用了電動缸作為傳動機構,從式(15)可知,當電機電流iq為定值時,身管角加速度隨身管所處角度變化,因此不滿足條件二。本文對誤差平方根和帶前饋的PID分段控制策略進行改進,提出了變系數誤差平方根和帶前饋的PID分段控制策略,應用于隨動系統的位置環控制器設計。位置控制器的輸出n1(r/min)為
(16)
式中:Ke為誤差平方根系數;e為角位置誤差(rad);e0為線性區和非線性區的分界點(rad);Kv為速度前饋系數;Ka為加速度前饋系數;θ1為角位置主令(rad);Kp為比例系數;Ki為積分系數;Kd為微分系數。
在式(16)中,系數Kv、Ka、Kp、Ki、Kd通過系統調試確定。考慮到誤差平方根控制的特點,即誤差越小,位置控制器輸出的變化率越大,越有利于利用系統的最大加速度制動,同時考慮到等速和正弦跟蹤時,需要足夠的線性區保證跟蹤性能,因此將本系統的線性區和非線性區的分界點e0設置為0.05 rad。Ke的計算方法如下:
(17)
通常期望制動結束時火炮身管的角速度為0,因此令ω0=0,得到:

(18)
由于n1的單位為r/min,ω1的單位為rad/s,兩者的單位不統一,根據身管角速度與電機角速度之間的關系以及n1和ω1之間的單位換算關系可知:
(19)
式中:i2為電機角速度與火炮身管角速度之間的速比。對比式(16)和式(19),得到:
(20)

3 驗證
采用電動缸傳動的某大口徑火炮的部分參數如下:l1=2.308 m,l2=0.58 m,i1=2.15,s=0.003 8 m,Kt=1.83 N·m/A,η1=0.86,η2=0.84,J1=73 100 kg·m2,J2=0.6 kg·m2。在高低隨動系統的位置控制器設計中,采用了本文提出的變系數誤差平方根和帶前饋的PID分段控制策略,程序采用C語言實現。將實際炮塔部分安裝在調試臺架上,測角器安裝在火炮耳軸上,測量火炮身管的實際角度,作為位置反饋,進行了隨動系統真實負載調炮實驗。實驗中,采用示波器測量角位置誤差,設置角位置誤差的最大限幅值為25 mrad。
圖4為從0 mrad到1 570 mrad調轉的位置誤差曲線,從圖4可以看出:到位誤差為0.4 mrad,調轉時間為2.2 s,超調量為3 mrad。圖5為從1 570 mrad到0 mrad調轉的位置誤差曲線,從圖5可以看出:到位誤差為0.4 mrad,調轉時間為2.1 s,超調量為2 mrad。從定位調轉位置誤差曲線看,調轉過程速度快,超調量小。圖6為負載在20 (°)/s 等速運動時的跟蹤誤差曲線,從圖6可以看出:位置跟蹤誤差最大為1.86 mrad。圖7為負載在幅值為25°,周期為6.28 s的正弦運動時的跟蹤誤差曲線,從圖7可以看出:位置跟蹤誤差最大為3.2 mrad。從等速跟蹤和正弦跟蹤誤差曲線看,跟蹤誤差小。
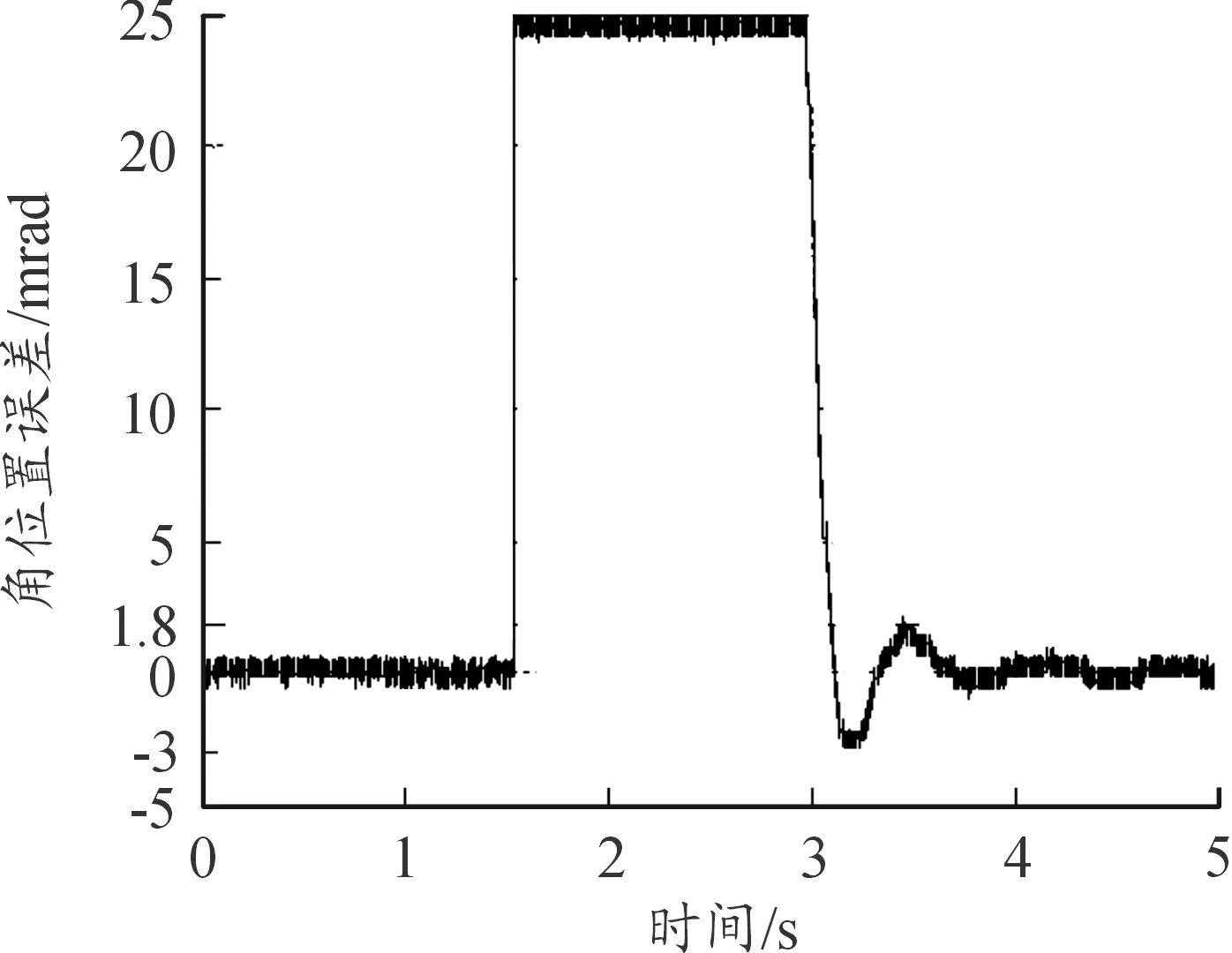
圖4 0 mrad到1 570 mrad調轉的位置誤差曲線
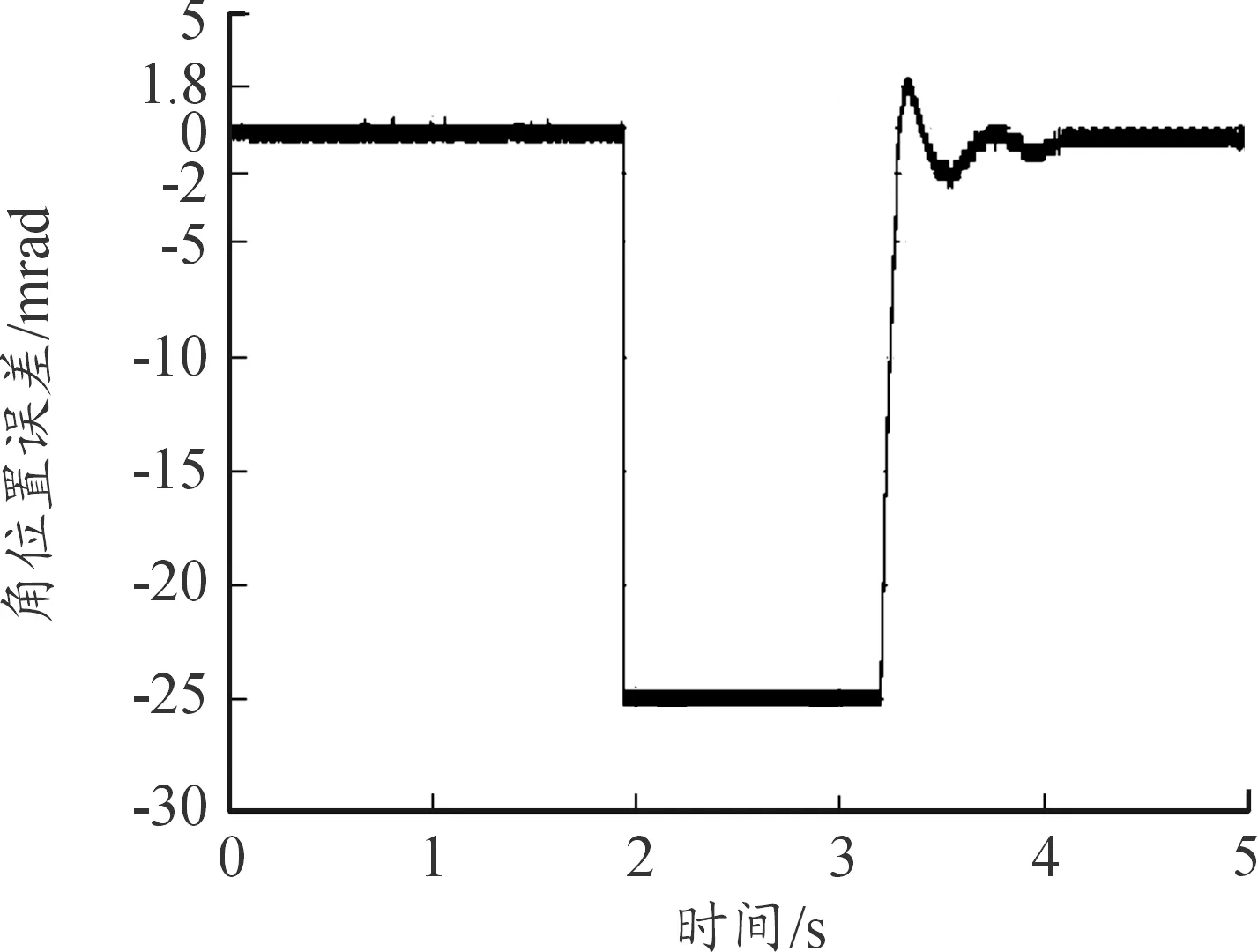
圖5 1 570 mrad到0 mrad調轉的位置誤差曲線
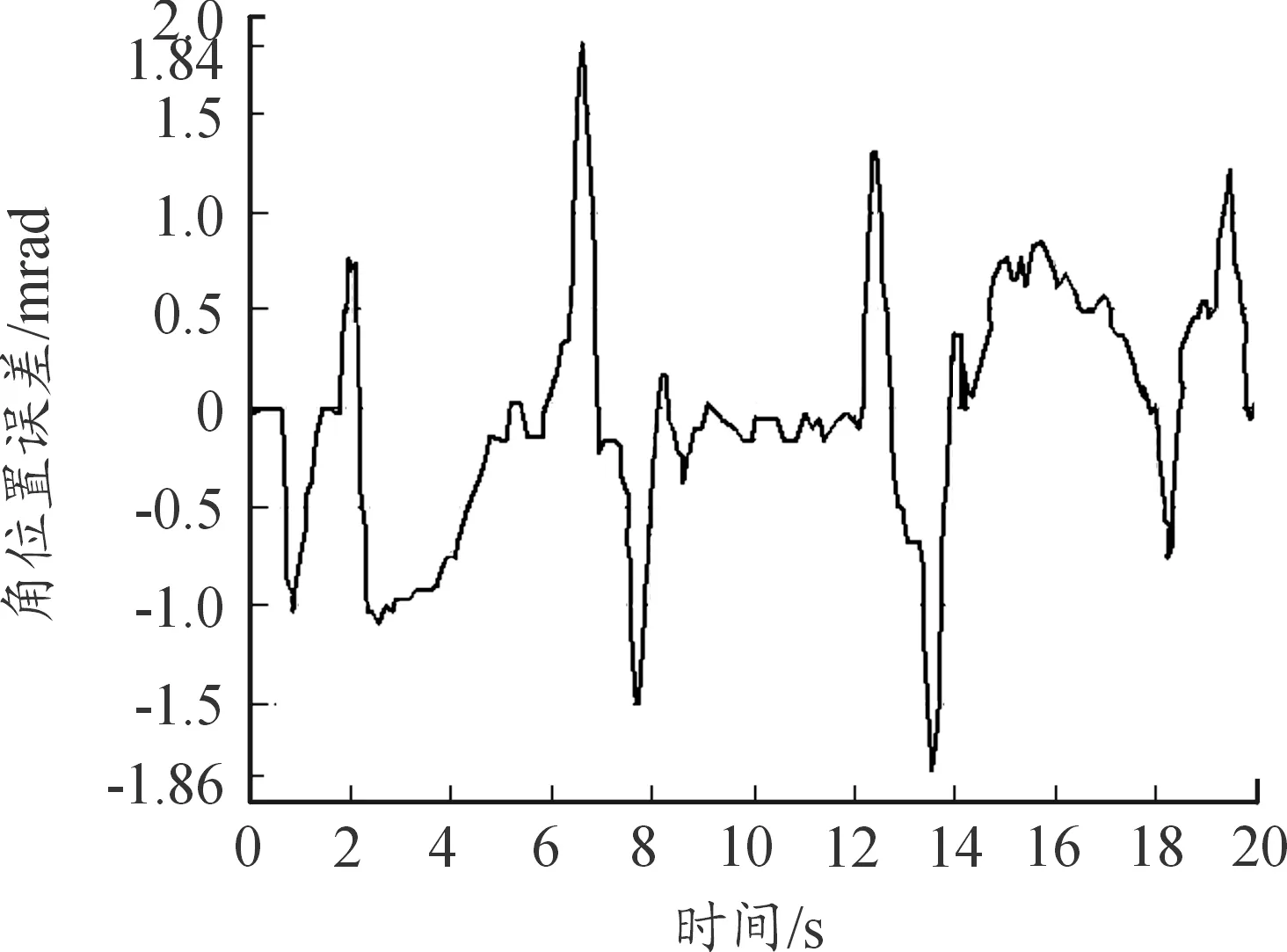
圖6 負載在20(°)/s 等速運動時的跟蹤誤差曲線
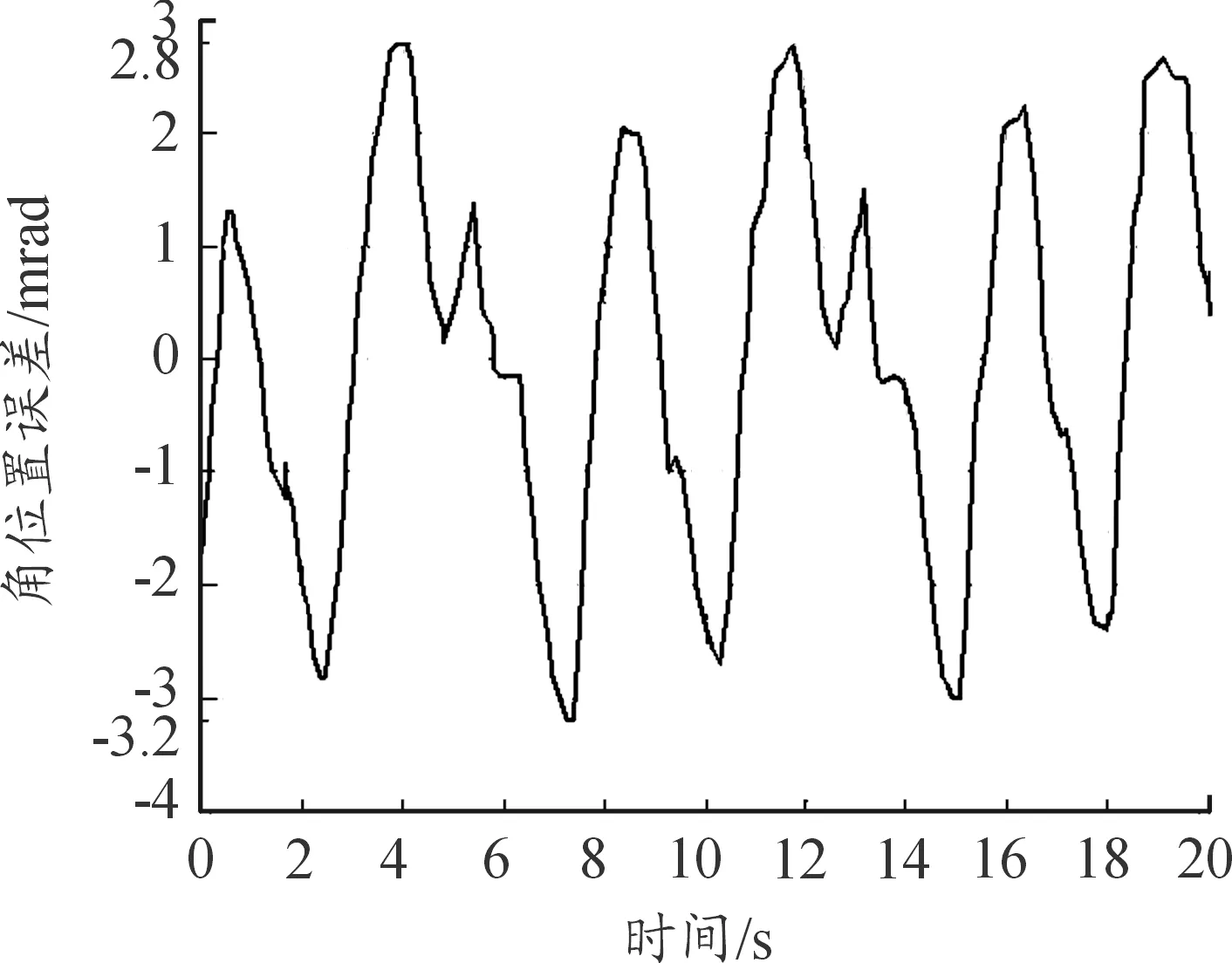
圖7 負載在幅值為25°,周期為6.28 s的正弦運動時的跟蹤誤差曲線
4 結論
對采用電動缸作為傳動機構的某大口徑火炮高低隨動系統進行分析,建立了火炮身管的運動學模型和動力學模型,提出了變系數誤差平方根和帶前饋的PID分段控制策略,利用火炮身管的運動學模型和動力學模型計算誤差平方根的控制系數,將該控制方法應用于隨動系統的位置控制器設計中。實驗結果表明:變系數誤差平方根和帶前饋的PID分段控制策略對于采用電動缸作為傳動機構的火炮隨動系統,能夠獲得較高的定位精度和跟蹤精度,系統快速性好,超調量小,具有工程實用性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26
