駕駛分心檢測方法綜述
2021-02-06 15:01:14李坤宸曹龍
汽車實用技術 2021年2期
李坤宸,曹龍
駕駛分心檢測方法綜述
李坤宸,曹龍
(長安大學汽車學院,陜西 西安 710064)
道路交通事故已經成為世界人民非自然死亡的主要原因,有學者認為90%的交通事故與駕駛員自身因素關聯,而其中又有超過50%與駕駛分心相關。為了對駕駛員分心進行識別以及為下一步的分心預警干預提供結果判斷,文章介紹了常見的駕駛分心檢測與識別方法,包括人臉識別方法,眼睛瞳孔位置識別以及基于駕駛員生理信號(EEG)的分心監測方法。結果表明檢測方法各有優劣,非接觸式、無侵入性檢測,對駕駛員行車體驗影響小,但測試精度具有一定的局限性。利用頭戴儀等接觸式設備,對駕駛員具有一定的侵入性,但是與其他檢測方式相比,則具有較高的準確性優勢。
駕駛分心;分心識別;瞳孔位置;EEG
前言
在分心檢測研究領域中,Wang提出了通過EEG信號分析駕駛員的注意力集中情況[1]。也有研究利用駕駛模擬器獲取行車參數檢測駕駛員分心。Xing等人提出了一種基于前饋神經網絡(FFNN)的系統,對駕駛員進行三維頭部旋轉角度和上半身關節位置的監控和駕駛任務識別[2]。本文主要對駕駛分心檢測方法進行簡單的論述。
1 人臉和頭部檢測
文章中作者用神經網絡和深度學習對人臉識別檢測,使用面部標志提取感興趣區域(ROI),最后檢測頭部和眼睛運動[3]。視頻數據作為系統輸入,分心的結果作為系統輸出。
1.1 駕駛員人臉識別
1.1.1人臉標志點檢測
在人臉突出區域使用面部標志來定位,建立傳統人臉識別的可視化的68個坐標索引。
1.2 駕駛員頭部運動檢測
從面部68坐標模型中,選15個特殊顏色的標點,用來估計頭部運動。頭部旋轉采用透視n點(PnP)的經典解計算,其工作原理如下:

式中:h是3D頭部姿勢,由6個自由度(DOF)組成,=(r,r,r)為旋轉,=(t,t,t)為平移。
然后通過透視變換計算頭部姿勢,公式如下:

式中:s為比例因子,M為攝像機矩陣,[R|t]為關節旋轉平移矩陣。
利用羅德里格斯旋轉公式得到的矩陣R在(3)中給出,并用于計算矢量=(r,r,r)。I表示向量的方向,的值等于||||。

式中:為旋轉角模,r表示頭部偏轉角。根據不同偏轉(左偏、右偏、無偏轉)角度值確定頭部的運動方向,作為判斷依據。
1.3 結果分析
在文章[3]中,作者對這種深度學習的算法并進行了驗證,實驗結果如表1所示。
表1 頭部運動實驗結果
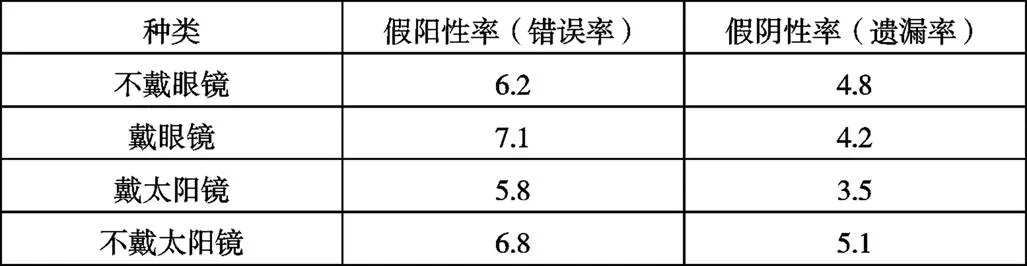
總體來說,不戴眼鏡或者太陽鏡分心的識別精度都取得了令人滿意的水平。該系統檢測具有較高的精度,總體準確率在92%左右。
2 基于瞳孔的駕駛分心檢測
在文章[4]中,作者采用Viola-jones算法從輸入幀中提取人臉區域[4]。采用模板匹配算法提取眼睛位置,根據眼角和瞳孔之間的距離實際估計注視位置,從而判斷分心。
2.1 瞳孔檢測識別模型
2.1.1眼睛的識別
攝像頭不斷捕捉司機的臉,并發送到處理單元。Dlib庫將坐標被映射到眼睛上,眼睛區域就從圖像中提取出來,再將圖像進行灰度處理,最后進行虹膜區域識別,如圖1。

圖1 突出顯示虹膜區域
2.2 瞳孔分心檢測指標
Dlib檢測器用6個坐標P1、2、3、4、5、6表示一只眼睛,如圖2。確定出理想瞳孔坐標o點,與實際坐標c比較。根據眼角坐標與預測瞳孔中心的距離,駕駛員的注視視線可以分為左、中、右方向。假定連續一段時間內超過了預設的方向范圍,則判斷為是分心。

圖2 瞳孔預測中心和理想中心
3 基于生理信號EEG的分心檢測
近年來,基于生理信號如腦電圖(EEG)、心電圖(EOG)、肌電圖(EMG)、心電圖的駕駛檢測受到了廣泛的應用。其中EEG因為高時間分辨率,便攜性好,對疲勞敏感的優勢受到更加廣泛的應用[5]。
3.1 主要成分分析---檢測過程與分析
實驗由一個32路腦電圖采集系統組成。志愿者頭皮佩戴腦電采集儀,實驗在駕駛模擬器上開展。
3.2 結果分析
參考以前的研究,在清醒和疲勞狀態小組相關腦電圖信號平均值的PSD分布為α(8 -13Hz)和β(14 – 20Hz)。簡而言之,在疲勞狀態時大腦的頂葉和枕葉的PSD值相比于清醒狀態更明顯,由此作為分心的判斷依據。不同狀態下α、β區域的功率譜密度圖像如圖3所示。論證了特殊區域的腦電信號與分心有很大的關聯性,論證了方法的可行性和科學性。

圖3 在疲勞狀態下和在清醒狀態,在α、β區域的功率譜密度
4 總結展望
本文簡述了幾種駕駛分心檢測方法,駕駛員分心狀態的檢測方法中,常見的有接觸式和非接觸式檢測兩種,非接觸式檢測對駕駛員來說無干擾性,但是準確度與接觸式識別相比誤差相對較大。
因此在下一步研究中,應該在保證準確性的前提下,力求做到不對駕駛員的日常行車造成干擾。另一方面,應注意在駕駛中,交通環境無時無刻不在變化,因此對駕駛員的注意力集中程度要求也不同。復雜交通環境下,要求駕駛員不能有絲毫分心;而在平坦的直線公路上,反而允許駕駛員有一定程度的分心。所以,未來的分心檢測系統應自動調節判斷分心程度的指標閾值,以一種更加智能的算法識別分心,并根據交通情景的復雜程度為人們設定合理的分心程度限度,以更加智能的方式融入駕駛員行車中。
[1] S.Wang,Y.Zhang,C..Darvas,“Online Prediction of Driver Distraction Based on Brain Activity Patterns,”IEEE Trans. Intell. Transp. Syst, vol.16,136-150, Feb. 2015.
[2] Y. Xing et al.,Identification and analysis of driver postures for in- vehicle driving activities and secondary tasks recognition[A]. IEEE Trans. Comput. Social Syst., vol. 5,pp. 95-108, March 2018.
[3] Lamia Alam,Mohammed Moshiul Hoque.Real-Time Distraction Detection Based on Driver's Visual Features[A].2019 International Conference on Electrical, Computer and Communication Engineer -ing. 7-9 February, 2019.
[4] Abhishek Walavakar1,Satyam Singh2,Roshan Salian3. Driver Distrac -tion Monitoring and Alerting System[A] International Conference on Advances in Information Technology.2019.1.
[5] Yuliang Ma,Bin Chen. Driving Fatigue Detection from EEG Using a Modified PCANet Method[A].Computational Intelligence and Neu -roscience.2019.7.
Review of Methods for Detection of Distracted Driving
Li Kunchen, Cao Long
(School of Automobile, Chang’an University, Shaanxi Xi’an 710064)
Road traffic accidents have become the main cause of people's unnatural death in the world. Some pointed out that 90% of traffic accidents are related to drivers themselves, and more than 50% of them are related to distracted driving. In order to identify the distracted driver and provide the result judgment in the future, This paper introduces the common methods of distracted recognition, including face recognition, pupil recognition and EEG monitoring. The results show that each method has its own advantages. The non-contact detection has little influence on driving, but its accuracy is poor. The use of contact equipment, such as head-mounted instrument, has certain influence on the driver, but the test results are more accurate.
Driving distractions; Distracted driving recognition; Pupil position; EEG
10.16638/j.cnki.1671-7988.2021.02.033
U471.3
A
1671-7988(2021)02-102-03
U471.3
A
1671-7988(2021)02-102-03
李坤宸,碩士,就讀于長安大學汽車學院,研究方向為交通安全。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
作文中學版(2022年1期)2022-04-14 08:00:34
汽車實用技術(2022年4期)2022-03-07 06:07:20
學生天地(2020年31期)2020-06-01 02:32:06
公民與法治(2016年4期)2016-05-17 04:09:26
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
計算機工程(2015年8期)2015-07-03 12:19:07
電測與儀表(2015年5期)2015-04-09 11:30:52
電子設計工程(2014年8期)2014-02-27 11:57:26
