橫浪海況下“藍鯨”號起重船吊裝上部組塊運動響應研究
2021-01-29 10:00:22駱寒冰劉福升
船舶力學 2021年1期
關鍵詞:船舶
駱寒冰,劉福升,羅 曉,謝 芃
(天津大學a.水利工程仿真與安全國家重點實驗室;b.船舶與海洋工程系,天津300072)
0 引 言
海上石油導管架平臺的上部組塊可以采用起重船吊裝方式安裝。作業時,為了減少上部組塊的運動響應,起重船通常以頂浪方式系泊就位。有時候,由于導管架布置原因,起重船只能橫浪吊裝作業;或者作業時海況比較復雜,主浪向有兩個方向,出現了橫浪工況。橫浪工況作業時,起重船和吊裝組塊的運動容易偏大,導致上部組塊安裝就位到導管架上面有困難,威脅施工作業的安全,甚至造成結構設備損壞和人員傷亡事故。Noble Denton[1]指導性手冊中給出了吊裝組塊的運動衡準:組塊垂向運動不超過±0.75 m,水平運動不超過±1.5 m。在組塊吊裝施工前,根據現場海上氣象預報資料,如果能夠提前對吊裝施工時組塊的運動響應情況進行準確預報,能判斷安全作業,那么就制定相關施工方案,以避免意外事故的發生。因此,開展系泊起重船吊裝組塊運動響應的研究具有重要的理論意義和工程應用價值。
系泊起重船吊裝組塊運動響應的研究,涉及波浪-系泊系統-起重船-吊纜-吊物(上部組塊)的復雜耦合系統,國內外開展數值模擬和模型試驗研究很少,其響應機理以及規律特性還有待深入研究探討。許鑫[2]等以一艘概念半潛式起重船為研究對象,用數值模擬和模型試驗的方法研究其空勾和最大起重時在波浪作用下的運動性能。駱寒冰等[3]對頂浪工況下“藍鯨”號起重船吊裝3 000 t組塊的耦合運動,采用MOSES軟件進行了數值模擬,后來,駱寒冰等[4]采用雙峰譜模擬涌浪,水池模型試驗研究了頂浪下吊裝運動響應。Li 等[5]在SIMO 程序中開發了一個外部動態鏈接庫,對風機基礎吊裝下放到水中的整個過程進行了時域數值模擬,考慮了船舶屏蔽效應的影響,并對波浪周期、波高參數進行了敏感性分析。
針對“藍鯨”號起重船,作者開展了橫浪下吊裝上部組塊的耦合運動響應研究工作。“藍鯨”號起重船隸屬海洋石油工程股份有限公司,2015年前是我國單臂起重能力最大的起重船,其最大起吊能力尾吊為7 500 t,全回轉為4 000 t。本文首先研究橫浪-系泊系統-起重船-吊纜-組塊復雜耦合系統的數值模擬方法;其次,在規則波中,預報組塊運動響應規律和特性,并通過數值模擬和模型試驗對比,研究其耦合運動響應機理;最后,預報典型橫浪不規則波工況下的運動響應,對比Noble Denton 相關衡準,研究允許施工作業的工況。
1 起重船吊裝組塊耦合系統模型
“藍鯨”號起重船一般采用艏吊方式吊裝作業,本文所提的耦合系統是指橫浪-系泊系統-“藍鯨”號起重船-吊纜-吊物(上部組塊)。本章主要介紹耦合系統模型情況,給出系泊系統、起重船和吊物的主要參數,具體見表1。其中船舶的排水量、重心位置都考慮了上部組塊的重量影響。起重船的系泊系統采用30°和60°的對稱系泊方式,系泊系統布置情況如圖1 所示。圖2 為“藍鯨”號起重船的模型表面網格劃分情況。施工作業海域水深設為80 m。
在天津大學港口與海洋工程試驗水池進行運動響應模型試驗,水池的長、寬、深尺寸為55 m ×40 m × 1.8 m,造波區域寬度24 m。模型縮尺比選擇1∶60,試驗水深1.33 m,模擬80 m 的水深。水池一側是推板式造波機,可造出規則波和不規則波,另一側是消波裝置。船舶模型采用玻璃鋼材質加工制作,上部組塊采用PVC 板焊接制作。船模和組塊的重量、重心、慣量都經過調整滿足相似關系。模型吊機系統的吊桿可以改變角度,吊纜長度可以調整,用來調整吊物的高度。系泊線采用鋼纜和彈簧組合制作。測試了船舶和組塊的六個自由度運動、波浪波高、錨纜系泊力等參數,采樣頻率取50 Hz。運動響應測試采用加拿大NDI Optotrak Certus 三維動態測量系統,最高精度可達0.1 mm,分辨率為0.01 mm(在2.25 m 時)。系泊拉力采用威思特公司的VS16 微小型拉力傳感器,量程為2 kg,精度為2 g。模型試驗布置情況如圖3所示。

表1“藍鯨”號起重船耦合系統主要參數Tab.1 Main particulars of the coupling system
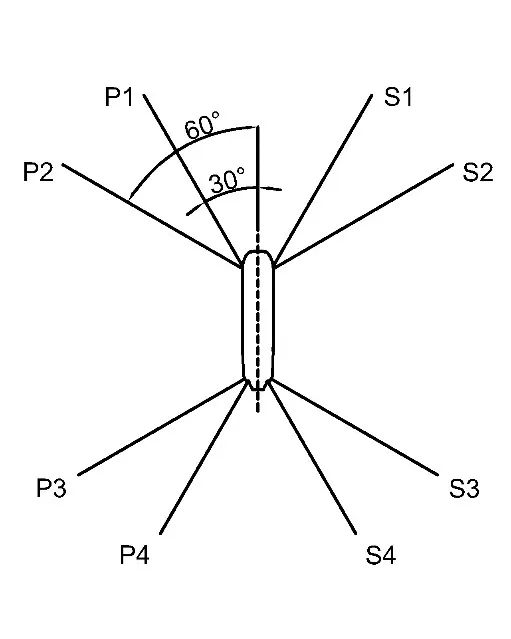
圖1“藍鯨”號起重船系泊布置圖Fig.1 Mooring layout of the vessel“Lanjing”

圖2“藍鯨”號起重船網格劃分情況Fig.2 Model meshes of the vessel“Lanjing”

圖3 橫浪中水池模型實驗布置情況Fig.3 Vessel model in the water basin in beam waves
2 耦合系統運動響應數值模擬方法
2.1 系泊系統運動響應分析方法
式(1)給出了系泊船舶的運動響應方程,

式中,Mij為廣義船體質量矩陣,Aij為附加質量系數矩陣,Bij為阻尼系數矩陣,Cij為恢復力系數矩陣,Fwj為波浪力,分為一階、二階波浪力,基于勢流理論推導,Fmk為系泊纜力,采取準靜態法分析。
2.2 二階波浪力計算方法
對于系泊船舶而言,所受到的波浪力不僅是波頻下的一階波浪力,還有二階波浪力,包括定常的漂移力(也稱平均波浪力)和低頻的緩變漂移力(也稱慢漂力)。二階力計算方法包括二階傳遞函數(QTF)方法和Newman 近似法[5]。本文對系泊“藍鯨”號起重船進行數值模擬時使用Newman 方法。Newman算法的近似表達式如下:

2.3 阻尼系數計算方法
為提高數值模擬結果的合理性和精確性,根據模型試驗的結果對船舶和吊物的阻尼系數進行了修正,方法如下:

式(4)中,2μi是第i 個自由度的無因次阻尼系數;Δφ 是衰減曲線中相鄰峰值點的差值;φim是衰減曲線中相鄰峰值點的均值;通過進行靜水各個自由度的自由衰減運動模型試驗,可以分析得到上述無因次阻尼系數2μi。
式(5)中,2Nj是有因次阻尼系數;Mj和ΔMj為船舶的質量和附加質量,可從HydroD 程序中計算得到;Tj是船舶運動周期,最終得到船舶的阻尼系數。
吊物運動的阻尼系數修正計算方法與上述船舶的方法類似。
3 靜水中耦合系統特性分析
對單根纜繩和整體系泊系統在靜水中的剛度特性進行研究。圖4 為單根纜的特性曲線,橫坐標為單根纜繩一端的水平偏移量(HDX),縱坐標為纜繩提供的拉力。圖5 為系泊系統的整體剛度位移曲線,橫坐標為船舶縱向運動距離(DX),縱坐標為船舶所受水平力。圖中,標識“SIMO”表示采用SI?MO 程序[7]分析結果,“EXP.”表示試驗結果,所有數值都已經轉化為實船尺度。對比表明模型試驗與數值模擬剛度特性結果吻合很好。

圖4 單根纜繩剛度位移曲線Fig.4 Horizontal force and distance of the mooring line

圖5 系泊系統總體剛度位移曲線Fig.5 Stiffness curves of the mooring system
在靜水中對系泊起重船進行了各個自由度的運動衰減實驗,測量固有周期及其阻尼特性。同樣,還對起重船約束不動情況下吊物橫蕩及縱蕩做了運動衰減實驗。表2 列出了模型實驗系泊起重船和吊物的固有周期與數值分析結果的對比,兩者吻合較好。根據第2.3節阻尼計算方法,用水池模型實驗得到的阻尼對數值模擬模型的阻尼進行了修正。通過上述分析,數值模擬模型和水池實驗模型的系泊剛度、船舶固有周期、阻尼特性保持一致,為后續波浪中耦合運動響應研究打下基礎。

表2 系泊起重船和吊物的固有周期對比Tab.2 Comparison of the natural periods of the vessel and the topside
4 規則波中耦合系統運動結果對比分析
為了研究橫浪-系泊系統-“藍鯨”號起重船-吊纜-吊物(上部組塊)耦合系統的運動特性,首先開展規則波下運動響應分析,波浪周期為5.0~22.0 s。由于浪向為橫浪,只分析了起重船的橫蕩、垂蕩和橫搖運動,以及上部組塊的橫蕩和垂蕩的運動情況。對數值模擬運動響應結果進行了濾波處理,分別得到低頻二階運動和波頻運動成分,與模型試驗結果進行了對比,見圖6~10。對結果進行了無量綱化處理,方法如下:

式中,ω為波浪圓頻率,Y、Z、φ分別為橫蕩、升沉和橫搖運動,L為船長,k為波數,ζ為波高。可以看出:
(1)數值模擬起重船和吊物的原始運動結果、高頻和低頻運動結果,與試驗結果吻合較好。起重船和吊物的橫蕩運動存在明顯的低頻二階運動成分,而起重船垂蕩、橫搖以及吊物垂蕩的低頻二階運動成分較小,主要是波頻運動成分;
(2)起重船的橫搖運動RAO存在兩個峰值,圓頻率ω'分別是1.631和2.447,對應的周期分別為18.0 s和12.0 s,分別接近吊物的固有周期和船舶的橫搖固有周期。表明當波浪周期與船舶橫搖周期接近時,會引起船舶橫搖共振;波浪周期與吊物固有周期接近時,由于吊物橫蕩共振,也會引起船舶橫搖運動增加,出現共振現象;
(3)吊物的橫蕩運動RAO存在兩個峰值,分別為18.0 s和12.0 s,與起重船橫搖運動RAO共振周期特性相同。波浪周期與吊物固有周期接近時,會引起吊物橫蕩共振;當波浪周期與船舶橫搖周期接近時,由于船舶橫搖共振,也會引起吊物橫蕩出現共振;
(4)數值模擬和模型試驗結果吻合較好,都揭示了在吊裝時起重船和吊物的耦合運動機理。在橫浪工況下,波浪周期接近船舶橫搖固有周期或者吊物橫蕩固有周期時,由于船舶與吊物之間互相耦合作用,船舶橫搖和吊物橫蕩運動都會出現共振現象。因此在施工過程中要實時觀測現場的環境,施工時波浪周期盡量避開船舶及吊物的固有周期。
圖6 系泊起重船橫蕩運動對比Fig.6 Comparison of sway motions of the vessel“Lanjing”

圖7 系泊起重船垂蕩運動對比Fig.7 Comparison of heave motions of the vessel“Lanjing”

圖8 系泊起重船橫搖運動對比Fig.8 Comparison of roll motions of the vessel“Lanjing”
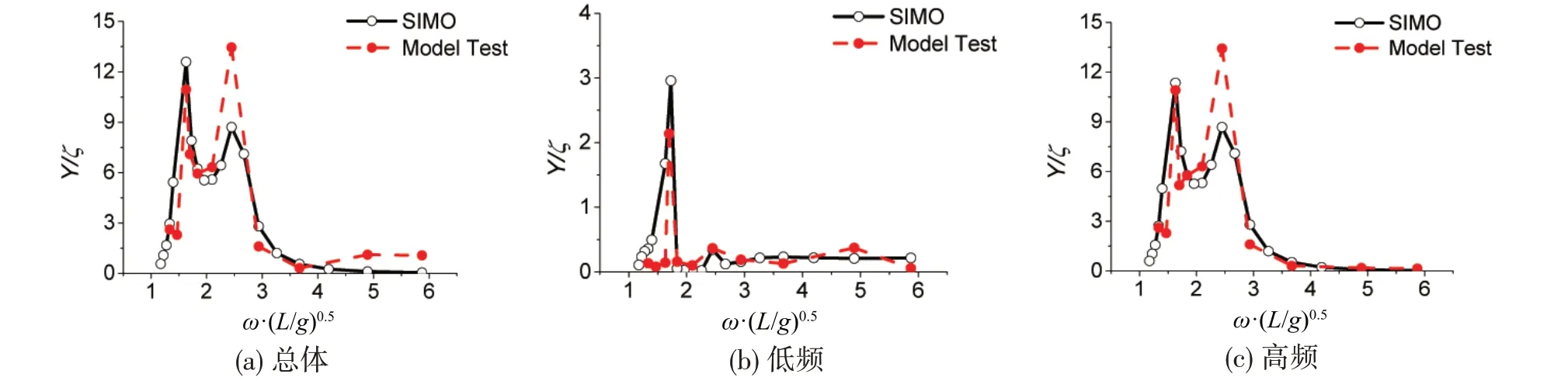
圖9 吊物橫蕩運動對比Fig.9 Comparison of sway motions of the topside

圖10 吊物垂蕩運動對比Fig.10 Comparison of heave motions of the topside
5 不規則波中耦合系統運動響應數值預報
上述數值模擬方法預報結果與模型試驗吻合較好,可以合理預報規則波中耦合系統運動規律,精度在可接受范圍內。本章將選取典型不規則波工況,利用該方法開展橫浪-系泊系統-“藍鯨”號起重船-吊纜-吊物(上部組塊)耦合系統的運動響應預測。根據施工海域波浪特性,不規則波的有義波高選取為0.75 m 和1.0 m,譜峰周期選取為8.6 s 和11.6 s,共四組工況。不規則波采用Jonswap 譜[6],公式如下:

圖11顯示的是波高為0.75 m,譜峰周期為8.6 s工況下的數值模擬時域曲線及其能量譜。圖12顯示了船舶橫蕩、船舶橫搖以及吊物橫蕩的時域曲線及其能量譜分析的結果。數值模擬時間為2 h,為了清楚地顯示,僅給出了1 000 s的時域結果。

圖11 工況1橫浪不規則波Fig.11 Irregular waves in beam seas


圖12 不規則波下起重船和上部組塊運動情況Fig.12 Motion responses of the vessel“Lanjing”and the topside in irregular waves
分析圖11和圖12,可以看出:
(1)起重船和吊物的橫蕩運動同時包含了低頻二階運動和波頻運動兩部分,其中低頻部分能量主要集中在0.01~0.07 rad/s 的頻率范圍,這是由不規則波中的系泊起重船二階慢漂運動所引起的,低頻部分相對波頻部分對合成運動影響較大;
(2)起重船和吊物的垂蕩運動基本集中在0.45~0.9 rad/s的頻率范圍,起重船的橫搖運動主要集中在0.45~0.8 rad/s的頻率范圍,這些主要是由于不規則波引起的波頻運動響應;
(3)起重船橫搖運動和吊物橫蕩波頻運動的譜能量分布類似,譜峰頻率都在0.55 rad/s 附近,表明吊物橫蕩的波頻運動與起重船橫搖運動這兩部分之間存在明顯的耦合響應關系;
(4)起重船和吊物垂蕩運動的譜能量分布類似,譜峰頻率都在0.7 rad/s附近,表明這兩個垂蕩運動之間存在耦合響應關系。
表3為四種波浪工況情況下數值模擬吊物運動的統計結果,包括有義值(即三一值,最大1/3平均值)、百一值(最大1/100平均值)。
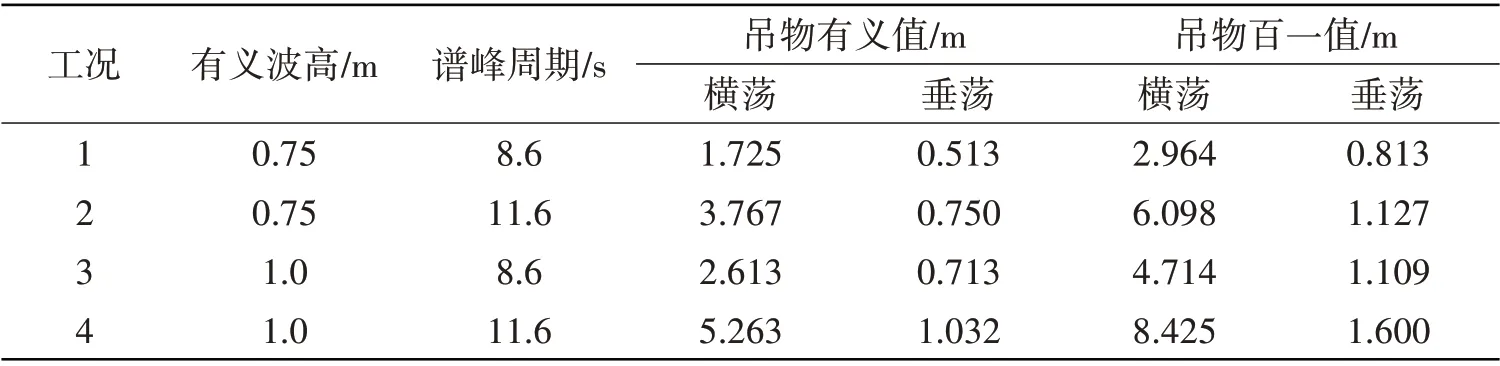
表3 橫浪不規則波中運動響應統計結果Tab.3 Statistical results of motions responses in irregular waves in beam seas
設百一值為最大值,根據Nobel Denton 指導性手冊中所推薦組塊吊裝安全施工的衡準要求,水平運動不超過±1.5 m,垂向運動不超過±0.75 m時可進行作業,可以看出:
(1)第一組工況的吊物運動滿足安全施工要求,即在譜峰周期為8.6 s 時,有義波高為0.75 m 時也可以進行施工作業;
(2)第二、三、四組工況的吊物運動不滿足安全施工要求,主要是橫蕩運動較大,超過了推薦衡準值,當譜峰周期增大到11.6 s時候,接近起重船的橫搖固有周期,引起吊物橫蕩運動響應較大;當有義波高增大到1.0 m時,由于波高較高,導致吊物的橫蕩運動響應較大,該海況下不建議施工。
6 結 語
作者針對橫浪-系泊系統-“藍鯨”號起重船-吊纜-吊物(上部組塊)復雜耦合系統開展了運動響應研究工作;對比了規則波中數值模擬結果與水池模型試驗結果,結果吻合較好;驗證了數值模擬的準確性;然后,對典型不規則波工況中的耦合運動進行了預報分析。
本研究揭示了起重船吊裝時的耦合運動機理,重點研究了上部組塊的橫蕩運動響應規律。在橫浪工況下,吊物橫蕩運動響應主要包括低頻和波頻兩部分,吊物的低頻部分主要與系泊起重船的橫蕩低頻二階運動響應相關,波頻部分主要與起重船橫搖運動相關。當波浪周期接近船舶的橫搖固有周期或者吊物的橫蕩固有周期時,由于船舶與吊物之間互相耦合作用,船舶橫搖和吊物橫蕩運動都會出現共振現象。
利用本文推薦的數值模擬方法,選擇典型不規則波海況,對橫浪系泊“藍鯨”號起重船吊裝上部組塊運動預報結果表明:當譜峰周期為8.6 s、有義波高為0.75 m 時,吊物運動滿足Nobel Denton 衡準要求,可以進行吊裝施工作業;當譜峰周期增大,接近船舶橫搖固有周期或者接近吊裝組塊固有周期時,會導致共振現象的發生,或當波高增大到1.0 m時,都會使得吊物橫蕩運動響應較大,不建議施工。因此,在現場海域施工時,應實時關注海況,包括波高和周期,盡量避免在波高較高時或者在波浪周期接近船舶橫搖固有周期或者吊裝組塊固有周期時作業。本文研究成果可以為海上現場吊裝施工提供技術參考,以提高作業效率和安全性。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30
