基于Udwadia-Kalaba理論的協(xié)作機(jī)器人軌跡跟蹤控制*
2021-01-27 02:23:42王凡志董方方
組合機(jī)床與自動化加工技術(shù) 2021年1期
韓 江,王凡志,董方方,夏 鏈
(合肥工業(yè)大學(xué)機(jī)械工程學(xué)院CIMS研究所,合肥 230009)
0 引言
協(xié)作機(jī)器人作為一種復(fù)雜的動力學(xué)系統(tǒng),其軌跡跟蹤控制重點(diǎn)在于,一是建立正確的動力學(xué)模型,二是選擇合適的控制策略。對建模方法的研究,從拉格朗日提出Lagrange乘子法以來,多種求解方法相繼問世,如旋量理論、凱恩方法、李群李代數(shù)方法等[1-2]。對于受約束系統(tǒng)來講,利用拉格朗日乘子可以有效地進(jìn)行約束力的計(jì)算,但實(shí)際中并非易為之事,特別是針對機(jī)器人這種復(fù)雜系統(tǒng)。
Udwadia等針對約束系統(tǒng)的動力學(xué)問題進(jìn)行了長期研究,并取得了一定的研究成果,提出了Udwadia-Kalaba(U-K)方程[3-4]。該方法可以相對簡單地建立約束下系統(tǒng)運(yùn)動方程。因此,這種動力學(xué)建模的新方法越來越受到青睞,如文獻(xiàn)[5]中對多體動力學(xué)研究、多自由度動力學(xué)研究都開始采用該方法。在該理論研究的基礎(chǔ)上,Udwadia對于非線性機(jī)械系統(tǒng)的軌跡跟蹤控制首先應(yīng)用了伺服約束控制的方法。佐治亞理工學(xué)院Chen較系統(tǒng)地提出了機(jī)械系統(tǒng)伺服束控制的概念[6-7],認(rèn)為給定的力取決于約束力,利用伺服控制來實(shí)現(xiàn)約束力的設(shè)計(jì)問題。文獻(xiàn)[8-10] 研究內(nèi)容均在工業(yè)機(jī)器人動力學(xué)控制方面應(yīng)用了該方法,文獻(xiàn)[11-12]也應(yīng)用了基于伺服約束的柔性機(jī)器人控制。由于機(jī)器人運(yùn)動過程中存在的一些不確定性會影響其運(yùn)動到預(yù)期的軌跡,為了實(shí)現(xiàn)精確的軌跡跟蹤,許多控制策略已經(jīng)被提出,文獻(xiàn)[13-18]分別使用不同方法進(jìn)行研究。主要是在PID參數(shù)的基礎(chǔ)上進(jìn)行迭代學(xué)習(xí)[13],利用負(fù)反饋原理不斷縮小誤差。此外,模糊控制、神經(jīng)網(wǎng)絡(luò)控制、魯棒控制等方法也被廣泛使用[14-18]。其最終的目的都是抵消不確定性帶來的誤差。
針對協(xié)作機(jī)器人的軌跡跟蹤控制問題,這里提出一種建立在U-K方程上的新的控制方法,將機(jī)器人給定的軌跡視為性能約束,通過系統(tǒng)約束來分析求解約束力,采用伺服控制方式來實(shí)現(xiàn)機(jī)器人的位置控制。在此過程中,理想狀況下的約束問題應(yīng)用了U-K方法,通過更少的計(jì)算量求解得出約束力。針對不確定性因素的影響,在上述的基礎(chǔ)上提出來一種自適應(yīng)魯棒控制方法。
1 理想約束下的動力學(xué)系統(tǒng)
在拉格朗日力學(xué)的基礎(chǔ)上。我們考慮這樣的一個(gè)機(jī)器人動力學(xué)系統(tǒng):

(1)

這是約束條件的一階形式,并且一般情況下可能是非理想的,將其寫成矩陣形式:

(2)
其中,A=[Ali]m×n,c=[c1,c2,...,cm]T
上式可以改寫成二階形式,并通過求取其關(guān)于t的微分。則得到二階約束形式為:

寫成矩陣形式為:

(3)
其中,b=[b1,b2,...,bm]T。式(3)即為被施加到系統(tǒng)上的約束的二階形式。假定系統(tǒng)是處于理想情況下的,則可以做出如下假設(shè):
假設(shè)1:對每個(gè)(q,t)∈Rn×R,σ∈∑,有M(q,σ,t)>0。
定義1:對給定的A和b,如果至少存在一個(gè)解,則約束稱為一致的。
假設(shè)2:約束(3)是一致的。
綜合考慮系統(tǒng)與約束力,在假設(shè)1和2的條件下,約束力可以表達(dá)為如下形式(即U-K方程)[4]:

(4)
該式遵守拉格朗日形式的達(dá)朗貝爾原理并使系統(tǒng)滿足約束。在建模準(zhǔn)確及不確定性已知的情況下,可由此給出輸入控制力矩,在不確定性未知時(shí),需要設(shè)計(jì)一種更實(shí)際的方法以使系統(tǒng)達(dá)到要求。
2 自適應(yīng)魯棒控制設(shè)計(jì)
由于外界環(huán)境等各種不確定性因素影響,機(jī)器人運(yùn)動狀態(tài)并非處于理想中。在設(shè)計(jì)控制τ時(shí)要考慮這些因素,把參數(shù)M,C和G作如下形式分解:

(5)
(6)
(7)
(8)
系統(tǒng)需要保持一定的穩(wěn)定性,這里需要給出一個(gè)不確定性邊界,在此繼續(xù)作以下假設(shè):
假設(shè)3:對每一個(gè)(q,t)∈Rn×R,A(q,t)都是滿秩的,也就是說,A(q,t)AT(q,t)是可逆的。
假設(shè)4:在假設(shè)3的條件下,對于給定的P∈Rm×m,P>0,令:

(9)
則存在一個(gè)常值ρE>-1,使得所有的(q,t)∈Rn×R,都有:
(10)
所控制的機(jī)器人系統(tǒng)需要滿足如下要求:①系統(tǒng)在理想狀態(tài)下滿足給定約束;②系統(tǒng)需要保證穩(wěn)定性;③系統(tǒng)需要考慮不確定性帶來的擾動。針對這幾個(gè)方面的問題,提出如下控制策略:
(11)
令:

(12)

(13)
假設(shè)5:


(14)
(15)
令:

(16)

(17)

(18)
(19)

(20)

3 穩(wěn)定性分析
控制理論中常借助李雅普諾夫方法直接判斷穩(wěn)定性,由于不確定性影響,該方法討論的系統(tǒng)平衡點(diǎn)不容易找到。故在非線性系統(tǒng)中,在此基礎(chǔ)上常用系統(tǒng)的一致有界性和一致最終有界性的概念來判斷穩(wěn)定性。
3.1 一致有界性與一致最終有界性
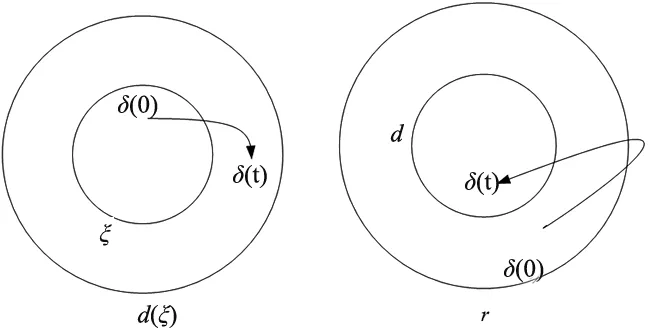
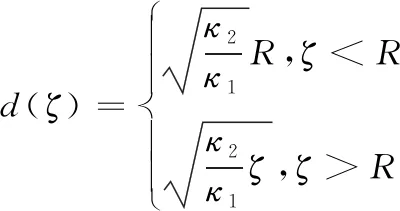
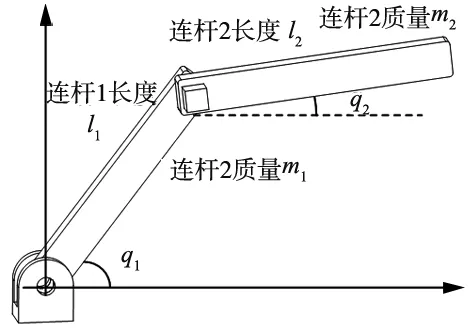
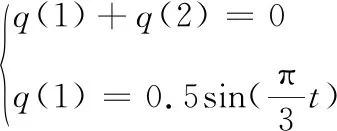
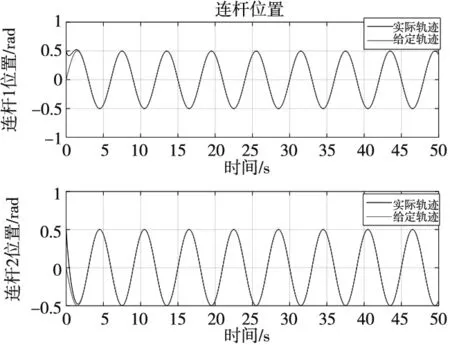
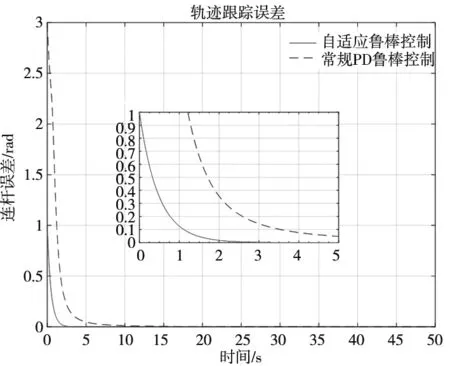
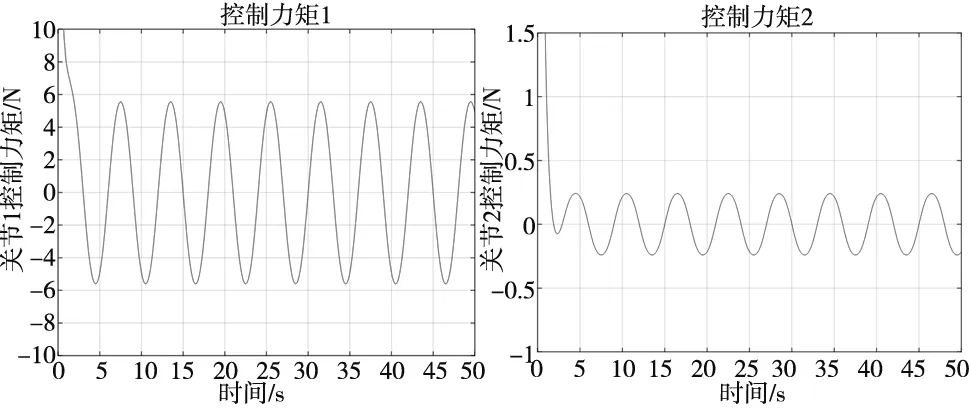
一致有界性:對于任何一個(gè)ξ>0,存在一個(gè)d(ξ)<∞,使得當(dāng)δ(0)<ξ時(shí),對所有的t≥t0,都有δ(t) 一致有界性與一致最終有界性如圖1所示。 圖1 一致有界性(左)與一致最終有界性(右) 一致最終有界性代表了一種比前者要求更嚴(yán)格的穩(wěn)定性。其物理意義是,系統(tǒng)從初態(tài)出發(fā),經(jīng)一段時(shí)間,末態(tài)總能回到原點(diǎn)附近某個(gè)給定球域。 選擇李雅普諾夫函數(shù)如下: (21) 求得其導(dǎo)數(shù)為: (22) (23) 由式(5)、式(6)、式(7)可知, (24) 該式可以繼續(xù)分為4部分計(jì)算: (2)由式(13)可知; (3)依據(jù)假設(shè)5(1)得到的式,可得: (4)第4部分結(jié)合公式(16)得到: μTPA(D+ΔD)p3=μTPADp3+μTPADEp3 根據(jù)式(8)、式(9)、式(10),推出: (25) (26) 根據(jù)假設(shè)5的(2)得知: (27) 將其代入式(25)、式(26): (28) 使用上面的自適應(yīng)律(20),可以得到: (29) 所以可以得到,式(22)變?yōu)椋?/p> (30) 根據(jù)所證明結(jié)果,可得到其一致有界性[19-20], 此外,一致最終有界性也可以得到: 上文使用的理論與推導(dǎo)的公式維度為n,適用于常見的多關(guān)節(jié)協(xié)作機(jī)器人。為闡述U-K方法解決機(jī)器人軌跡跟蹤問題的基本步驟,這里對一個(gè)2R機(jī)器人進(jìn)行仿真分析,便于讀者理解與掌握。 通過分析當(dāng)前常見的6軸協(xié)作機(jī)器人結(jié)構(gòu)可以發(fā)現(xiàn),機(jī)器人前3個(gè)關(guān)節(jié)確定其位置,后3個(gè)關(guān)節(jié)確定姿態(tài),并且關(guān)節(jié)2和關(guān)節(jié)3的力臂最長、慣量變化范圍最大、受重力影響最顯著。 因此,將機(jī)座固定,不考慮腰部轉(zhuǎn)動,末端幾個(gè)確定姿態(tài)的關(guān)節(jié)視為負(fù)載,簡化為一個(gè)2R機(jī)器人進(jìn)行仿真分析,且考慮到旨在證明控制方法的有效性,也具有實(shí)際意義。其結(jié)構(gòu)如圖2所示。 圖2 結(jié)構(gòu)示意圖 根據(jù)式(1)的數(shù)學(xué)模型,求得其主要參數(shù)如下: G1=(m1+m2)gl1s1+m2gl2s12;G2=m2gl2s12; 選擇下列函數(shù)以滿足假設(shè)(5): 使用以下參數(shù)進(jìn)行仿真驗(yàn)證: m1=m2=1,l1=1,lc1=lc2=0.5,g=9.8,P=6,ε=0.1,γ=12 初始位置q(1)=0.5,q(2)=0.5。 圖3所示為兩連桿的角度位置隨時(shí)間變化的行蹤,其中黑色部分為所選用的控制方法得到的結(jié)果,紅色部分為給定的軌跡要求。可以看出,由于設(shè)置的初始條件并不滿足約束條件,因此開始時(shí)時(shí)存在誤差的,但隨即很快逐漸趨于正常。 圖3 約束連桿位置變化過程 圖4表明了兩連桿位置之和也即所給定的約束條件,可以看出,除了初始狀態(tài)不滿足設(shè)想狀態(tài),經(jīng)過很快的時(shí)間達(dá)到并保持穩(wěn)定。 并且通過使用普通PD魯棒控制得到的約束誤差與實(shí)驗(yàn)仿真結(jié)果進(jìn)行對比,紅色實(shí)線表示的是本文設(shè)計(jì)的方法的跟蹤結(jié)果,藍(lán)色虛線表示的是常規(guī)PD魯棒控制得到的跟蹤結(jié)果。圖中小圖為前5 s內(nèi)的放大部分。 從仿真結(jié)果可以看出,由于初始狀態(tài)的原因,開始是不滿足精度要求的,但當(dāng)前狀態(tài)下,本方法的效果在約1 s內(nèi)即達(dá)到約0.1 mm以內(nèi),相較之常規(guī)控制方法在4~5 s內(nèi)才能達(dá)到標(biāo)準(zhǔn)而言,可以看出具有更快的收斂速度與穩(wěn)定性。 圖4 軌跡跟蹤誤差 圖5和圖6分別展示了兩個(gè)關(guān)節(jié)所需控制力矩的變化,可以看出除初始略有波動外,達(dá)到穩(wěn)定后所需力矩較為平穩(wěn),說明整個(gè)過程的穩(wěn)定性很好。 圖5 關(guān)節(jié)1所需控制力矩變化過程 圖6 關(guān)節(jié)2所需控制力矩變化過程 文章提出了一種基于U-K理論的自適應(yīng)魯棒控制器,來處理協(xié)作機(jī)器人的軌跡跟蹤問題。針對一個(gè)受約束的協(xié)作機(jī)器人系統(tǒng),將控制分為標(biāo)稱部分與不確定性部分。前者利用U-K方程求解得到理想狀況下的主動作用力,對后者設(shè)計(jì)了自適應(yīng)魯棒控制器并驗(yàn)證了其穩(wěn)定性。控制設(shè)計(jì)的過程中,通過將約束條件進(jìn)行微分,可以同時(shí)處理完整約束與非完整約束。并且,除了假設(shè)不確定性邊界的存在性以外不需要其他關(guān)于不確定性的信息。 仿真實(shí)例結(jié)果表明:①機(jī)器人連桿的位置按照給定約束運(yùn)動,跟蹤誤差較小。②軌跡跟蹤誤收斂時(shí)間相較常規(guī)魯棒控制小,表明該控制具有較快的響應(yīng)速度。③控制輸入的力矩波動變化平穩(wěn),表明了該系統(tǒng)具有很好的穩(wěn)定性。因此,該方法有效地保證了協(xié)作機(jī)器人系統(tǒng)對于給定軌跡的跟蹤性能。
3.2 穩(wěn)定性證明















4 仿真實(shí)例





5 結(jié)論
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
意林原創(chuàng)版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
