兩相靜止坐標系下的永磁同步電動機模型預測功率控制
2021-01-11 08:33:48姚緒梁黃乘齊王景芳劉銅振
電工技術學報 2021年1期
關鍵詞:方法
姚緒梁 黃乘齊 王景芳 馬 赫 劉銅振
兩相靜止坐標系下的永磁同步電動機模型預測功率控制
姚緒梁 黃乘齊 王景芳 馬 赫 劉銅振
(哈爾濱工程大學自動化學院 哈爾濱 150001)
為避免轉子位置角檢測誤差給永磁同步電動機調速系統帶來的不利影響,提高系統的可靠性,提出一種等價于d=0的永磁同步電動機模型預測功率控制方法。該方法通過建立兩相靜止坐標系下的電機增量模型,使用枚舉法對基本電壓矢量作用下的電流進行預測,利用采樣得到的電壓及電流估計反電動勢和轉子側瞬時功率值,然后通過功率價值函數選擇最優電壓矢量。所提方法無需使用高分辨率位置傳感器檢測轉子位置角進行旋轉坐標解耦變換,可降低系統的復雜度。電機增量模型無需使用永磁體磁鏈參數預測電流,降低了算法對電機參數變化的敏感度。實驗對比了所提控制方法與直接功率控制的穩態功率波動、轉矩波動和暫態響應速度等指標,證明了所提方法的有效性。
表貼式永磁同步電動機 兩相靜止坐標系 瞬時功率 預測控制
0 引言
逆變器饋電的永磁同步電動機(Permanent Magnet Synchronous Motor, PMSM)具有功率密度高、效率高、轉矩脈動小等特點,已廣泛應用在航空航天、船舶電力推進、汽車與工業自動化等諸多領域[1]。目前比較成熟的控制方法是矢量控制(Field Oriented Control, FOC)和直接轉矩控制(Direct Torque Control, DTC)。FOC使用轉子磁鏈定向,引入坐標變換將定子電流解耦為轉矩電流分量和勵磁電流分量,擁有較好的穩態性能,但轉子位置角檢測精度將直接影響系統的性能[2]。DTC構造了相對獨立的轉矩滯環和磁鏈滯環結構,實現磁鏈和轉矩的直接控制,但存在低速性能差、開關頻率不固定等缺點。考慮到矢量控制與直接轉矩控制存在的問題,各國學者開始尋求綜合提升系統性能的控制方法,如魯棒控制[3]、滑模控制[4]、模型預測控制[5-9]等。在這些先進的控制方法中,有限集模型預測控制因其實現簡單,具有良好的動態性能而受到廣泛的關注。
根據控制對象不同,有限集模型預測控制通常分為模型預測電流控制(Model Predictive Current Control, MPCC)[5-6]、模型預測轉矩控制(Model Predictive Torque Control, MPTC)[7]、模型預測磁鏈控制(Model Predictive Flux Control, MPFC)[8]。基于電機的數學模型,MPCC預測逆變器每個開關狀態下的電流響應,并選擇可以將價值函數最小化的電壓矢量作為最優電壓矢量。與FOC相類似,MPCC的性能也依賴轉子位置角檢測的準確性。不同于MPCC,MPTC將價值函數中的dq軸電流替換為轉矩與定子磁鏈,由于控制變量具有不同的量綱,需要引入權重系數,而當前權重系數的選取缺少明確的理論指導,設計過程復雜,不易得到最優值[9]。
隨著瞬時功率理論的不斷完善[10],功率作為控制變量被應用于電機動態控制方法中[11-14]。文獻[11]在永磁同步電動機開環/控制方案的基礎上,通過電機的瞬時功率反饋值來調節電流矢量,實現電流矢量閉環。文獻[12]通過控制電機輸入瞬時有功無功功率來控制電機磁場和輸出轉矩,獲得了快速的轉矩動態響應和穩定的穩態轉矩。文獻[13]分析了逆變器輸出功率與電磁轉矩、定子磁場之間的關系,利用FOC坐標變換的思想,給定電機所需的有功功率與無功功率,計算所需電壓矢量。該方法有效抑制了功率波動,但其功率給定機制相對復雜且與轉子位置角采樣精度有關。文獻[14]借鑒DTC的思想,提出了基于開關表的直接功率控制方法(Direct Power Control, DPC),根據瞬時有功功率與無功功率滯環比較器的輸出,查詢開關表,選取合適的開關電壓矢量,從而對瞬時功率進行直接控制以達到調速目的。直接功率控制形式簡單,但會帶來較大的功率波動。
為避免轉子位置角檢測不準對電機運行性能造成的影響,同時降低電機運行過程中的功率波動,本文應用瞬時功率理論對永磁同步電動機的能量傳遞過程進行分析,建立了兩相靜止坐標系下的電機增量模型,得到了轉子側功率在兩相靜止坐標系下的表達式,提出了一種永磁同步電動機模型預測功率控制方法(Model Predictive Power Control, MPPC)。該方法無需使用轉子磁鏈定向,避免了旋轉坐標變換,降低了系統的復雜度。使用增量預測模型,降低了系統對參數變化的敏感度。采用轉子側有功功率、無功功率作為被控對象,避免了因價值函數中控制對象量綱不同而設計權重系數。與傳統的DPC方法相比,所提控制方法在電機運行過程中的功率波動更小。實驗結果驗證了該控制方法的有效性。
1 永磁同步電動機瞬時功率數學模型
1.1 永磁同步電動機數學模型
本文3s/2s變換采用恒功率變換,其變換矩陣為1。
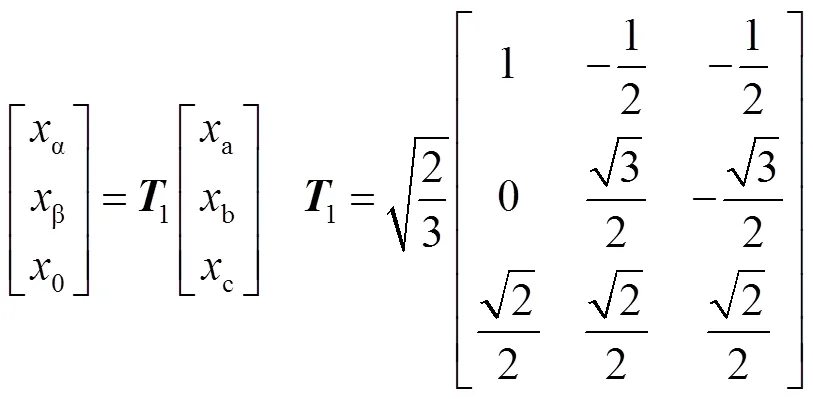
式中,可表示電壓、電流及磁鏈。
假設磁路不飽和,空間磁場呈正弦分布,不計磁滯和渦流損耗影響,兩相靜止坐標系下表貼式永磁同步電動機的電壓方程為

其中,反電動勢表示為
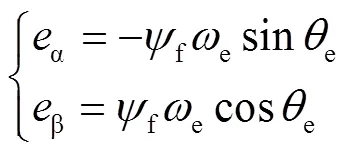
式中,α、β分別為電機a、b軸定子電壓;α、β分別為電機a、b軸定子電流;α、β分別為電機a、b軸反電動勢;s、s分別為電機定子等效電阻和電感;f為電機轉子永磁體磁鏈;e和e分別為電機電角速度和轉子位置角。
1.2 瞬時功率分析
根據瞬時功率理論,系統輸入的有功功率與無功功率可表示為
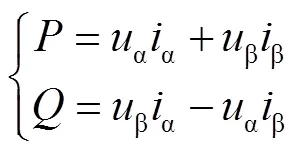
根據式(2)和式(4)可得功率表達式為
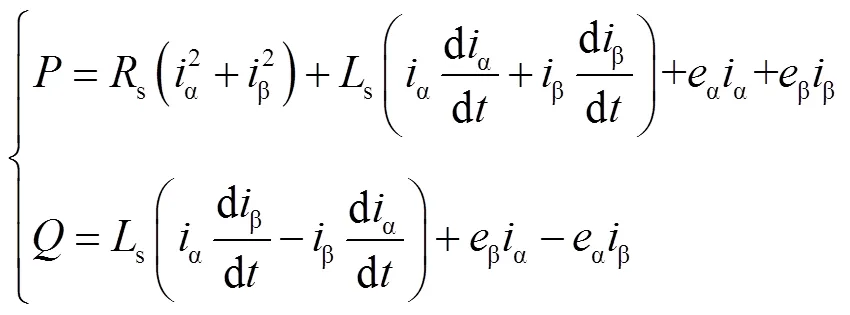
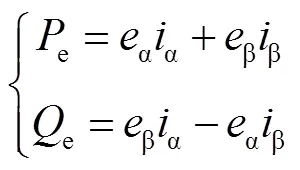
對式(5)進行分析,有功功率可分為三個部分:第一部分為定子電阻消耗的功率;第二部分為耦合磁場磁能變化的功率;第三部分為傳遞到轉子側的功率,即電磁功率。無功功率可分為兩部分:第一部分為耦合磁場吸收的功率;第二部分為傳遞到轉子側的無功功率,即為勵磁功率。由此可得傳遞到電機轉子側的功率表達式為
1.3 轉子側功率與轉子磁場定向dq軸電流的關系
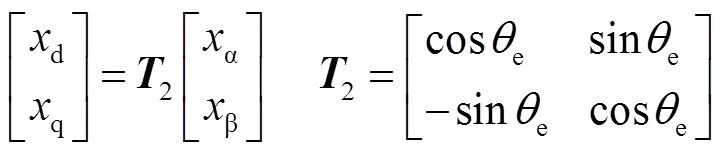
利用轉子磁鏈進行定向,其變換矩陣為2。
根據式(3)與式(7)可以得到
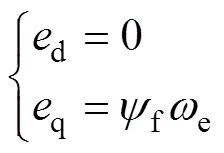
利用2的逆矩陣,可以得到
結合式(8)對式(9)進行分析,對于表貼式永磁同步電動機,當采用d=0的控制方法時,電機轉子側無功功率e為0,電機轉子側有功功率e與q軸電流q呈線性對應關系。由此可見,靜止坐標系下的轉子側無功功率給定值為0的控制方法與傳統d=0的控制方法等價。
2 模型預測功率控制方法
2.1 增量模型
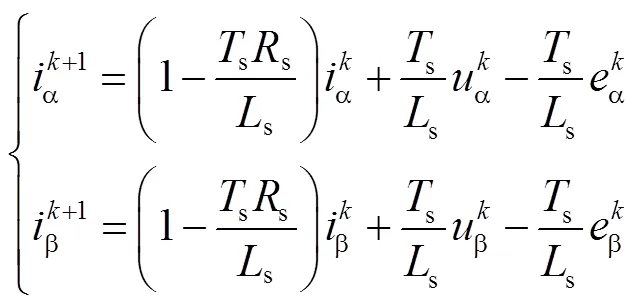
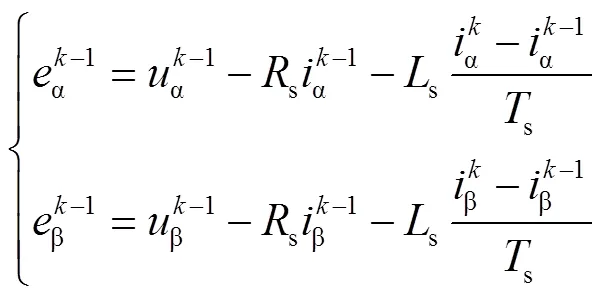
考慮數字控制系統時序控制中存在的一拍延遲的問題,利用前向歐拉法將式(2)離散化,得到電流的離散方程為
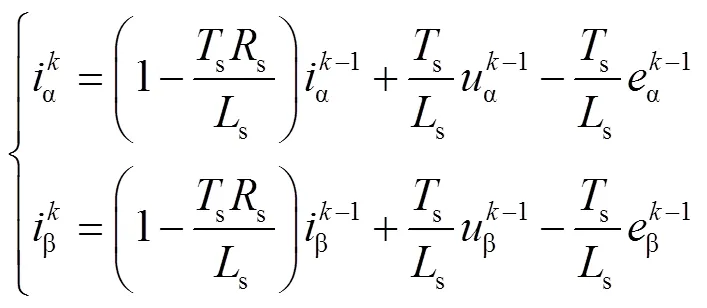
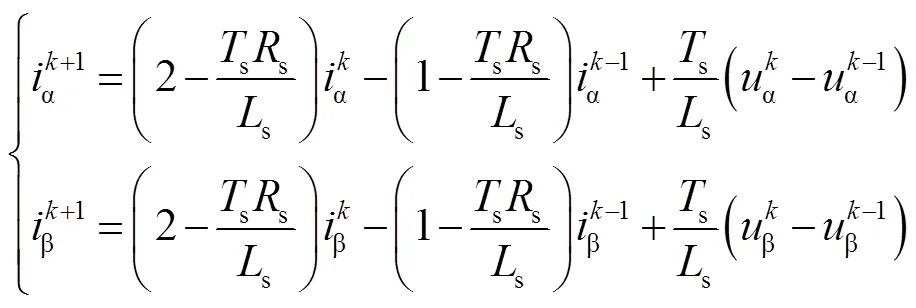

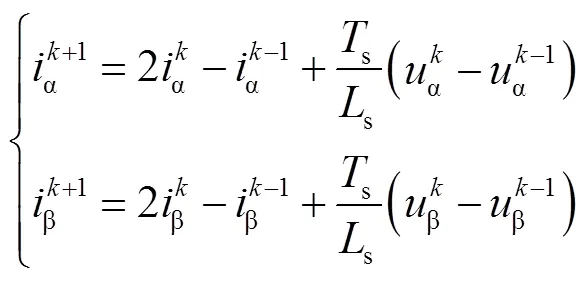
利用s及(-1)s拍采樣得到的電壓和電流預測+1拍的電流、,從而利用預測得到的(+1)s的電流代替采樣電流進行轉子側功率計算,補償了數字控制系統存在的延遲。延遲補償后,(+2)s時刻的電流可以表示為
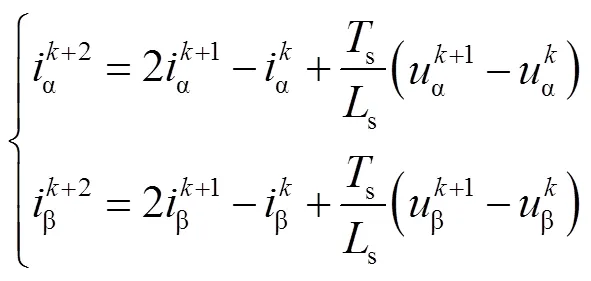
與傳統電流預測方程式相比,利用式(14)對兩相靜止坐標系下電流進行預測,無需使用轉子位置角計算反電動勢,同時避免了使用定子電阻及轉子磁鏈幅值,降低了系統對電機參數變化的敏感度。
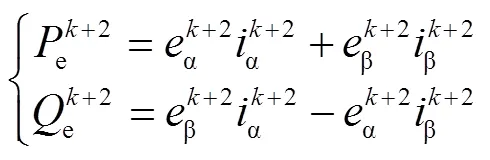
2.2 轉子側功率預測
根據瞬時功率理論得到電機轉子側功率離散方程為
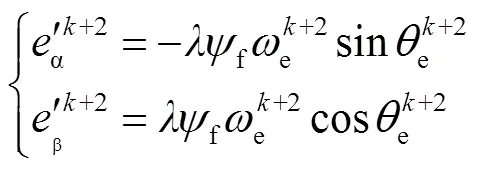
傳統計算+2拍反電動勢的方法需使用電機轉子永磁體磁鏈f、電機電角速度e和轉子位置角e。當溫度升高電機永磁體磁鏈參數會發生變化,導致估計轉子側功率與實際轉子側功率產生偏差。假設永磁體磁鏈參數變為標稱值的倍,實際反電動勢可表示為
因為+2拍電流使用增量模型進行預測,因此反電動勢偏差并不會對電流預測值產生影響,根據式(15)、式(16)得到實際轉子側功率與估計轉子側功率的關系為

為避免永磁體磁鏈參數變化及轉子位置角采樣誤差對系統帶來的不利影響,利用電機電壓方程對反電動勢進行估計,根據式(11)可以得到
當采樣頻率為10kHz時,由于采樣頻率較高,可認為(+2)s時刻的電角速度與永磁體磁鏈參數相對于(-1)s時刻沒有發生變化,但相對于(-1)s時刻,(+2)s時刻的轉子位置角發生了3es的偏移。因此利用-1拍反電動勢估計+2拍反電動勢,需要將該角度偏移進行補償,根據式(3)可知
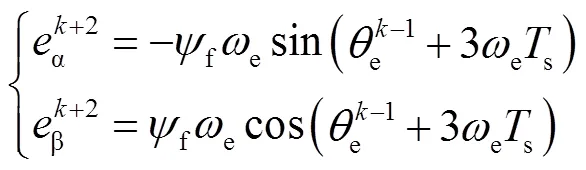
根據式(19)可以得到+2時刻反電動勢與-1時刻反電動勢之間的關系為
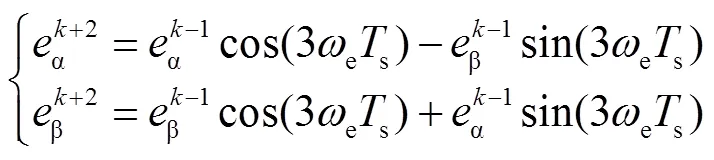
使用式(20)計算反電動勢,無需利用永磁體磁鏈,降低了參數的敏感性,且不需要使用轉子位置角及電機轉速,避免了測量噪聲給系統帶來的不利影響。
轉子側有功功率給定值可由式(21)計算。
式中,eref是由PI控制器產生的參考電磁轉矩;m為機械角速度。轉子側無功功率給定eref為0。
利用價值函數來評估6個非零基本電壓矢量及零矢量對有功功率和無功功率的控制效果,使價值函數值最小的電壓矢量即為最優電壓矢量。定義給定功率參考值與+2時刻的預測功率值之間偏差值的2-范數為價值函數為

MPPC方法的結構框圖如圖1所示。MPPC的算法流程如圖2所示。
首先利用拍及-1拍的定子電壓和定子電流進行數字控制系統延遲補償,得到+1拍電流,隨后預測基本電壓矢量作用下+2拍的電流、反電動勢及功率,根據價值函數對預測結果進行評估并選出最優電壓矢量在下一個控制周期發出。
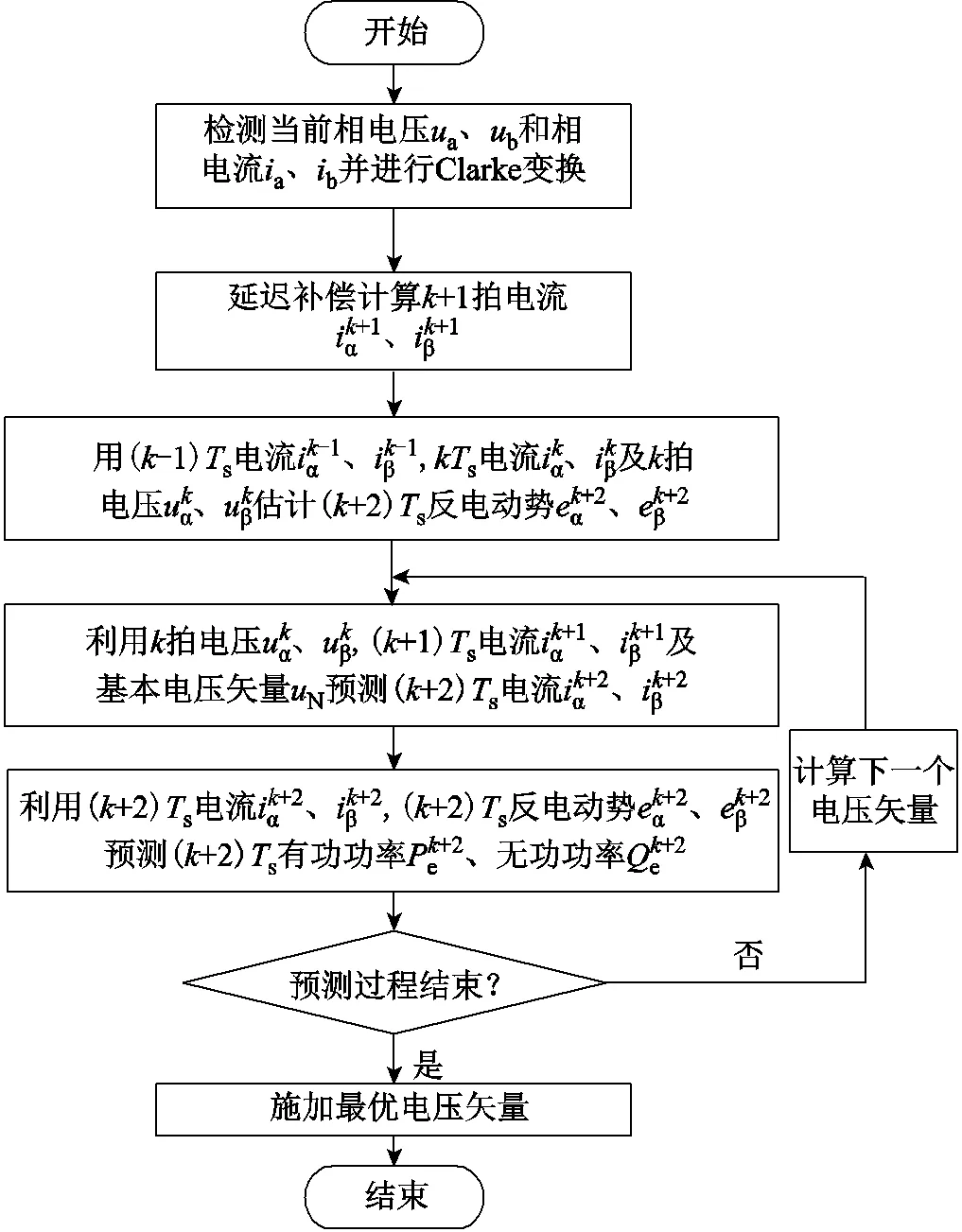
圖2 MPPC控制算法流程
3 仿真與實驗結果分析
使用5.5kW的永磁同步電動機進行實驗研究,該電機的參數見表1。
表1 系統和控制參數
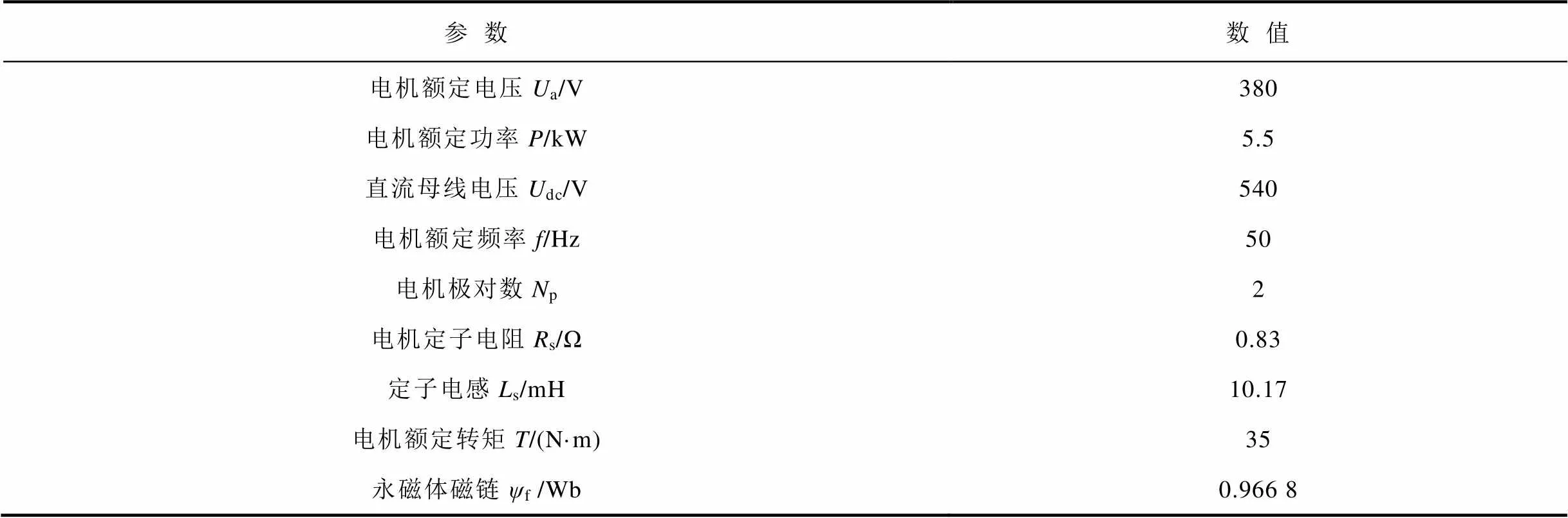
Tab.1 System and control parameters
系統控制器使用數字控制器TMS320F28335,三相橋逆變器使用三菱公司的PM50RL1A060,電流傳感器采用LEM15-NP,電壓傳感器采用LEM公司的LV25-P,實驗環境如圖3所示。實驗中定子電流使用電流探頭測得,其他變量由DA轉換器輸出到示波器上顯示。系統采樣頻率為10kHz。
由于實驗中無法直接改變電機永磁體參數,針對本文所提控制方法,在仿真環境下對永磁體磁鏈參數變化的魯棒性進行驗證。以模型預測功率控制方法為基礎,將使用電機參數計算反電動勢的方法與本文提出的反電動勢估計方法進行對比,仿真所用參數與前文給出的電機參數完全相同。當電機運行在1 500r/min,負載轉矩為15N·m的條件下,永磁體磁鏈參數分別變化為標稱值的0.8倍、1.2倍,仿真結果如圖4所示。
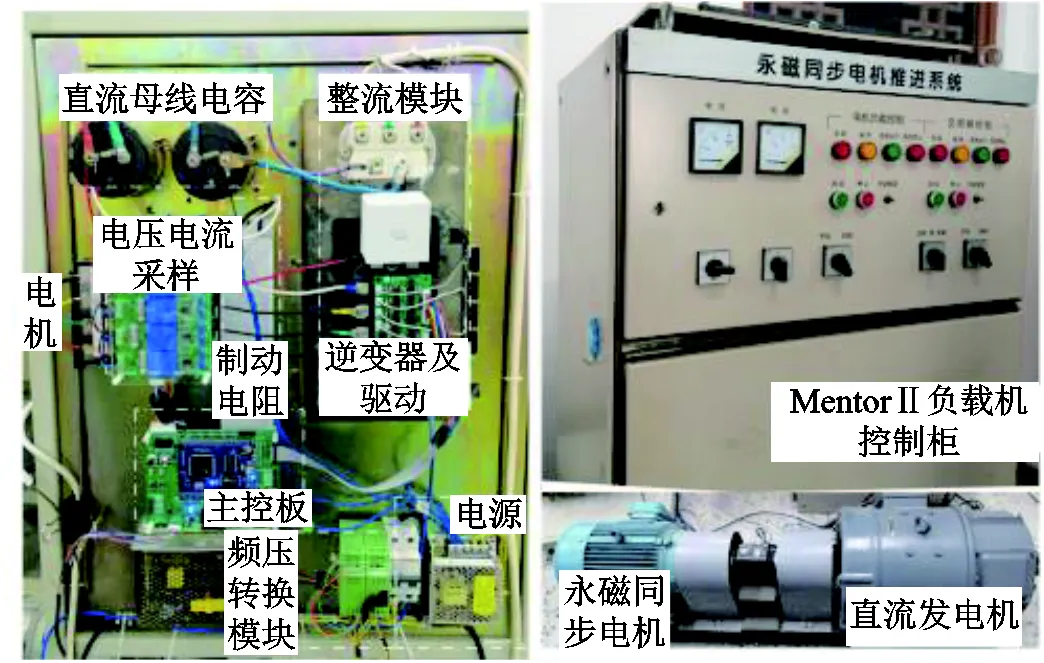
圖3 永磁同步電動機實驗平臺
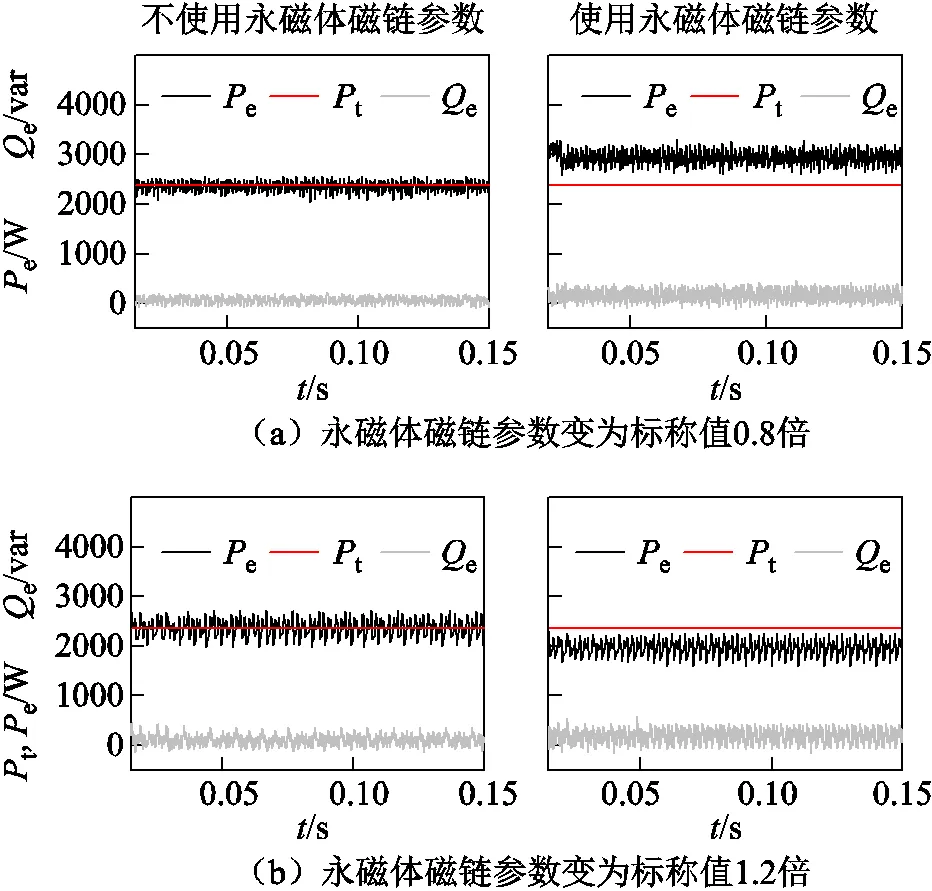
圖4 參數變化影響
當電機穩定運行在1 500r/min、負載轉矩為15N·m的條件下,電機電磁轉矩等于負載轉矩,理論上所需轉子側有功功率t為2 356kW。從仿真結果可以看出,當永磁體磁鏈參數變化為標稱值的0.8倍、1.2倍后,使用電機參數估計反電動勢導致電機轉子側有功功率無法跟蹤功率理論值,且電機轉子側無功功率波動較大,而使用本文所提估計方法在永磁體參數發生變化后,轉子側功率仍能有效跟蹤理論值,因為所提估計方法并不需要使用永磁體參數來估計反電動勢,有效提高了系統的可靠性。同時,因為對電流、轉速的估計都無需使用轉子位置角,有效避免了轉子位置角采樣誤差對控制系統的影響。
為了驗證本文所提方法在功率波動抑制方面的表現,與傳統的直接功率控制方法(Direct Power Control,DPC)[14]進行對比,測試條件為轉速1 500r/min,負載轉矩30N·m。實驗結果如圖5所示,其中,ep-p表示有功功率峰-峰值,ep-p表示無功功率峰-峰值,ep-p表示電磁轉矩峰-峰值。本文使用轉矩紋波系數來評價電機穩態運行時轉矩脈動,轉矩紋波系數定義為
功率紋波系數Δ%計算方法與轉矩紋波系數Δ%計算方法相同。
在穩態情況下,MPPC的轉矩紋波系數Δ%約為18.6%,DPC的轉矩紋波系數Δ%約為27.1%。與DPC相比,使用MPPC控制方法使轉矩波動降低了約8.5%。
為進一步驗證MPPC在抑制功率波動的能力,負載轉矩為30N·m條件下,分別在300r/min、600r/min、900r/min和1 200r/min的條件下進行測試,其有功功率波動峰-峰值ep-p、無功功率波動峰峰值ep-p、功率紋波系數Δ%如圖6所示。
由圖6可以看出,在不同轉速的情況下,MPPC控制方法相對于DPC控制方法都有效降低了運行過程中的功率波動。相比DPC控制方法,使用MPPC控制方法的功率紋波系數Δ%降低了約10%,驗證了該方法在功率波動抑制方面的有效性。
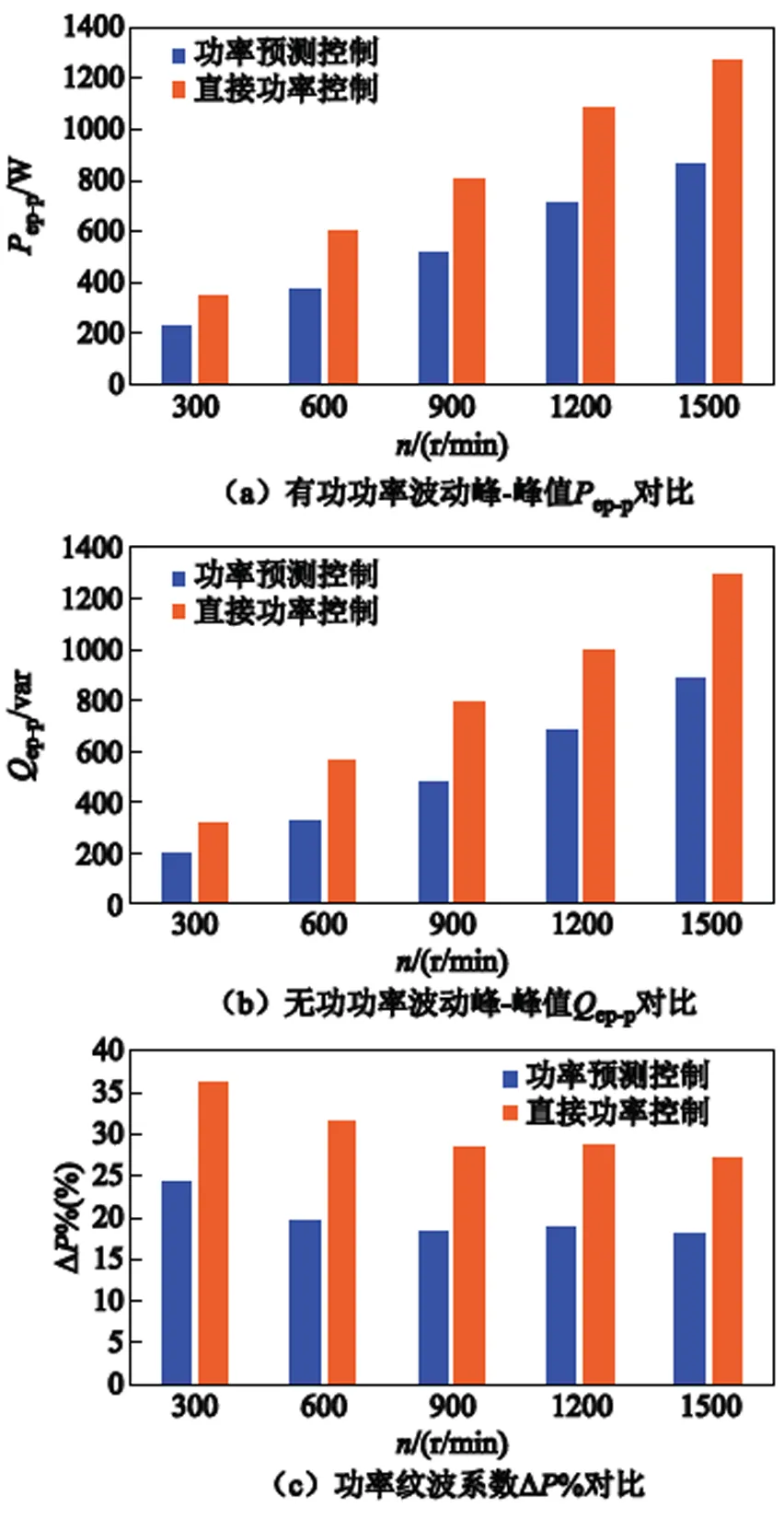
圖6 不同轉速下穩態性能對比
負載轉矩為15N·m條件下,轉速給定由500r/min階躍為1 500r/min,其實驗結果如圖7所示。兩種控制方法轉速達到給定所需時間大約為0.43s。可見本文所提方法具有與DPC控制方法的動態調節時間大體相當,均具有良好的動態性能。但在加速過程中,MPPC的功率波動、轉矩波動更小。
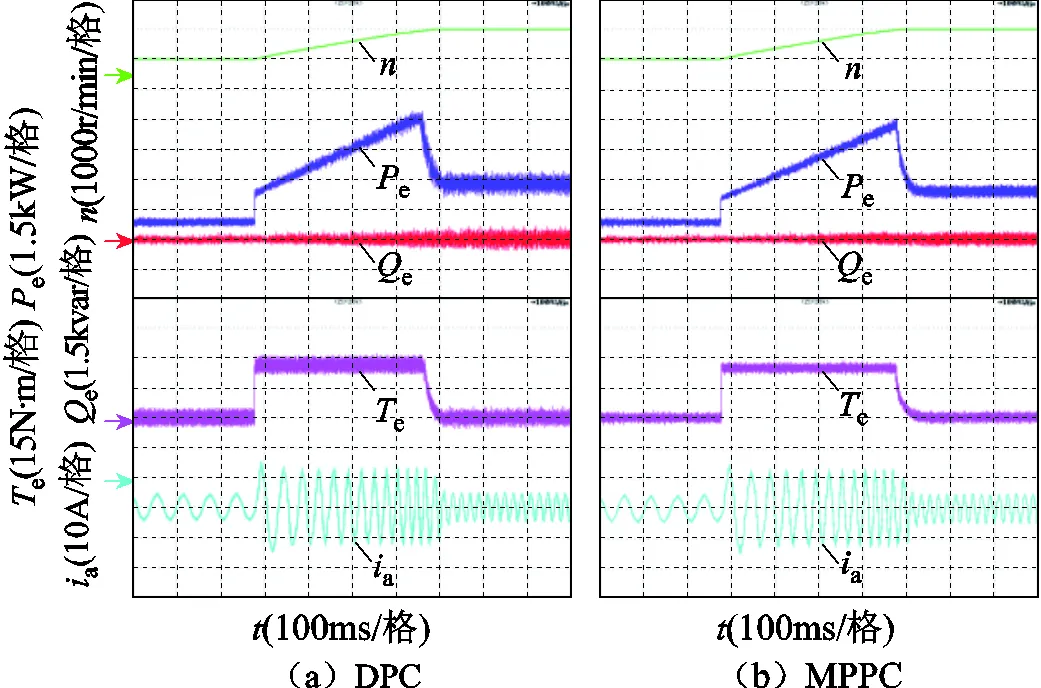
圖7 MPPC與DPC轉速突變實驗對比
圖8為轉速為1 500r/min,負載轉矩由15N·m突變為30N·m的實驗波形對比。突加負載時兩種控制方法均出現約90r/min的轉速跌落,隨后迅速回調,MPPC對負載轉矩突變的響應速度幾乎與DPC相同,但MPPC的功率波動、轉矩波動更小。
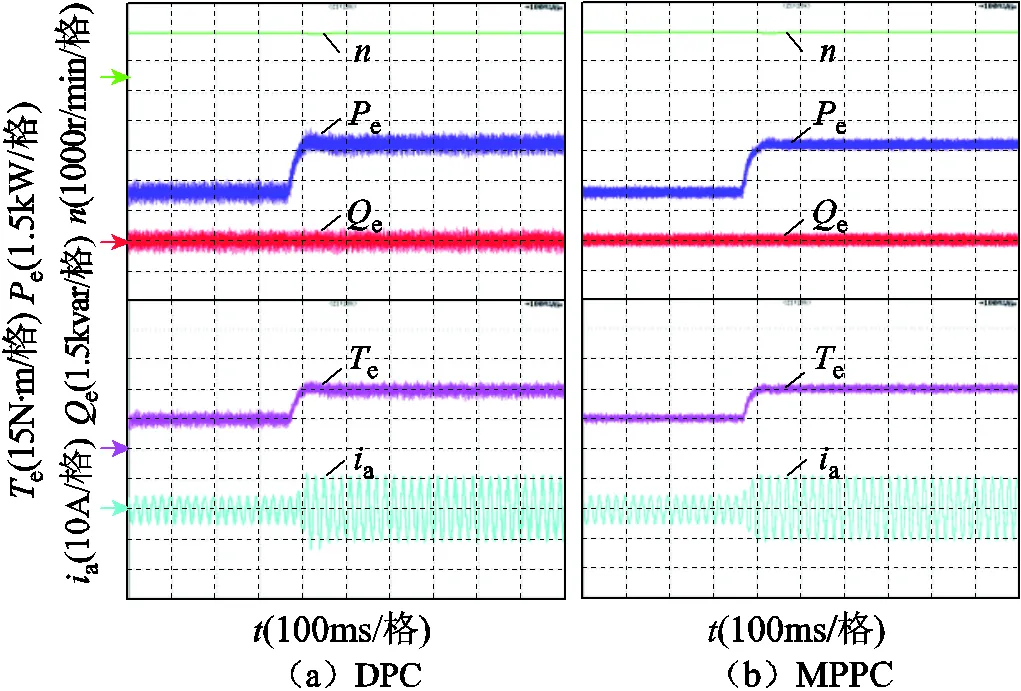
圖8 MPPC與DPC轉矩突變實驗對比
將傳統dq軸坐標系下模型預測電流控制方法(MPCC)、直接功率控制方法(DPC)、本文所提控制方法(MPPC)算法程序執行時間進行對比,對比結果見表2。
表2 不同控制方法程序執行時間

Tab.2 Program execution time of different control methods
可以看出直接功率控制方法與本文所提控制方法算法執行時間接近。相對于傳統模型預測電流控制方法,本文所提控制方法將算法執行時間減小了34%,原因是本文所提控制方法在兩相靜止坐標系下執行,避免了枚舉法選擇最優電壓矢量過程中頻繁使用三角函數進行計算。這有利于后續在此控制方法的基礎上加入電感參數辨識等算法,再次提高該控制方法的可靠性。
4 結論
為減小轉子位置角檢測不準給電機性能帶來的不利影響,本文提出了一種永磁同步電動機模型預測功率控制方法并得到以下結論:
1)本文提出的永磁同步電動機模型預測功率控制方法完全在兩相靜止坐標系下實現,無需使用轉子位置角定向,避免了傳統電流控制方法中轉子位置角檢測誤差給系統性能帶來的不利影響。
2)使用增量模型預測電流,無需使用轉子位置角計算電機反電動勢,降低了控制方法對參數變化的敏感度。
3)與傳統直接功率控制方法相比,在不犧牲動態響應速度的情況下有效減小了電機運行的功率波動和轉矩波動。
4)不同于傳統模型預測轉矩控制,以轉子側有功功率、無功功率作為控制對象,兩者具有相同的量綱,無需為價值函數設計權重系數。
[1] 張永昌, 楊海濤, 魏香龍. 基于快速矢量選擇的永磁同步電機模型預測控制[J]. 電工技術學報, 2016, 31(6): 66-73.Zhang Yongchang, Yang Haitao, Wei Xianglong. Model predictive control of permanent magnet synchronous motors based on fast vector selection[J]. Transactions of China Electrotechnical Society, 2016, 31(6): 66-73.
[2] 王海兵, 趙榮祥, 湯勝清, 等. 永磁同步電機位置檢測偏差對驅動系統性能的影響[J]. 電工技術學報, 2018, 33(4): 910-918. Wang Haibing, Zhao Rongxiang, Tang Shengqing, et al. Research on the influence of the position detection error to the PMSM drive system[J]. Transactions of China Electrotechnical Society, 2018, 33(4): 910-918.
[3] 侯利民, 申鶴松, 閻馨, 等. 永磁同步電機調速系統_∞魯棒控制[J]. 電工技術學報, 2019, 34(7): 1478-1487. Hou Limin, Shen Hesong, Yan Xin, et al._∞Robust control of PMSM speed regulation system[J]. Transactions of China Electrotechnical Society, 2019, 34(7): 1478-1487.
[4] Peng Xiaoyan, Jia Mingfei, He Lei, et al. Fuzzy sliding mode control based on longitudinal force estimation for electro-mechanical braking systems using BLDC motor[J]. CES Transactions on Electrical Machines and Systems, 2018, 2(1): 142-151.
[5] Zhang Yongchang, Xu Donglin, Liu Jiali, et al. Performance improvement of model predictive current control of permanent magnet synchronous motor drives[J]. IEEE Transactions on Industry Applications, 2017, 53(4): 3683-3695.
[6] Zhang Xiaoguang, Zhang Liang, Zhang Yongchang. Model predictive current control for PMSM drives with parameter robustness improvement[J]. IEEE Transactions on Power Electronics, 2019, 34(2): 1645-1657.
[7] 周湛清, 夏長亮, 陳煒, 等. 具有參數魯棒性的永磁同步電機改進型預測轉矩控制[J]. 電工技術學報, 2018, 33(5): 965-972. Zhou Zhanqing, Xia Changliang, Chen Wei, et al. Modified predictive torque control for PMSM drives with parameter robustness[J]. Transactions of China Electrotechnical Society, 2018, 33(5): 965-972.
[8] Zheng Zhihao, Sun Dan. Model predictive flux control with cost function-based field weakening strategy for permanent magnet synchronous motor[J]. IEEE Transactions on Power Electronics, 2020, 35(2): 2151-2159.
[9] 牛峰, 韓振鐸, 黃曉艷, 等. 永磁同步電機模型預測磁鏈控制[J]. 電機與控制學報, 2019, 23(3): 38-45. Niu Feng, Han Zhenze, Huang Xiaoyan, et al. Model predictive flux control for permanent magnet synchronous motor[J]. Electric Machines and Control, 2017, 32(19): 1-10.
[10] Guo Xiaoqiang, Chen Weijian. Control of mutiple power inverters for more electronics power systems: a review[J]. CES Transactions on Electrical Machines and Systems, 2018, 2(3): 255-263.
[11] 王萌, 楊家強, 張翔, 等. 一種表貼式永磁同步電機電流矢量閉環/控制方法[J]. 中國電機工程學報, 2015, 35(10): 2513-2521. Wang Meng, Yang Jiaqiang, Zhang Xiang, et al. An/control method with closed-loop regulation of current vector for surface permanent magnet synchronous motor drives[J]. Proceedings of the CSEE, 2015, 35(10): 2513-2521.
[12] 鄭灼. 永磁同步電機瞬時功率控制[J]. 中國電機工程學報, 2007, 27(15): 38-42.Zheng Zhuo. Instantaneous power control of permanent magnet synchronous machine[J]. Proceedings of the CSEE,2007, 27(15): 38-42.
[13] 李昆鵬, 萬健如, 朱琳. 永磁同步電機瞬時功率預測控制[J]. 電工技術學報, 2015, 24(10): 38-44. Li Kunpeng, Wan Jianru, Zhu Lin. Predictive instantaneous power control for permanent magnet synchronous motors[J]. Transactions of China Electrotechnical Society, 2015, 24(10): 38-44.
[14] 儲劍波, 胡育文, 黃文新, 等. 永磁同步電機直接功率控制基本原理[J]. 電工技術學報, 2009, 24(10): 21-26. Chu Jianbo, Hu Yuwen, Huang Wenxin, et al. Basic theory of direct power control for PMSM[J]. Transactions of China Electrotechnical Society, 2009, 24(10): 21-26.
[15] 王庚, 楊明, 牛里, 等. 永磁同步電機電流預測控制電流靜差消除算法[J]. 中國電機工程學報, 2015, 35(10): 2544-2551. Wang Geng, Yang Ming, Niu Li, et al. A static current error elimination algorithm for PMSM predictive current control[J]. Proceedings of the CSEE, 2015, 35(10): 2544-2551.
Model Predictive Power Control of Permanent Magnet Synchronous Motor in Two-Phase Static Coordinate System
Yao Xuliang Huang Shengqi Wang Jingfang Ma He Liu Tongzhen
(School of Automation Harbin Engineering University Harbin 150001 China)
In order to avoid the adverse effect of rotor position detection error on permanent magnet synchronous motor (PMSM) speed control system and improve the reliability of the system, a model predictive power control method equivalent to thed=0 control method is proposed to improve the reliability of the system in this paper. Through the establishment of a motor incremental model in a two-phase stationary coordinate system, the enumeration method is used to predict the current under the action of the basic voltage vector, The sampled voltages and currents are used to estimate the back electromotive force and the instantaneous power on rotor side. Then, the cost function based on power are established to select the optimal voltage vector. The proposed method does not need to use a high-resolution position sensor to detect the rotor position angle for decoupling transformation of the rotating coordinate, which reduces the complexity of the system. The incremental model predicts currents without using permanent magnetic flux linkage parameters, which reduces the sensitivity of the algorithm to changes in the motor parameters. A comparative study between the proposed method and direct power control were conducted in terms of power ripples, torque ripples and dynamic response. The experimental results verify the effectiveness of the control method.
Surface-mounted permanent magnet synchronous motor(SPMSM), two-phase stationary coordinate system, instantaneous power, predictive control
TM351
10.19595/j.cnki.1000-6753.tces.200416
高技術船舶科研計劃“高性能電動甲板吊機研制”資助項目。
2020-04-27
2020-07-03
姚緒梁 男,1969年生,博士,教授,研究方向為電力電子與電力傳動、船舶電力推進技術。E-mail:yaoxuliang@hrbeu.edu.cn
王景芳 男,1984年生,博士,研究方向為大功率變流器的諧波抑制。E-mail:jingfangwang@hrbeu.edu.cn(通信作者)
(編輯 郭麗軍)
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56