理論力學教具DIY系列(二)十字軸萬向節及轉角差異的演示模型
2021-01-08 06:14:42高云峰
力學與實踐 2020年4期
關鍵詞:差異
高云峰
(清華大學航天航空學院,北京100084)
十字軸萬向節是一種在工程中應用較為廣泛的傳動系統,它的主動軸與從動軸可以存在一定的夾角。十字軸萬向節具有制造簡單、可靠耐用等優勢,但存在主動軸與從動軸轉速不等的情況。在主動軸旋轉 360°的過程中,雖然從動軸也同樣旋轉 360°,但兩者的轉角、角速度并不總是相等,這就是十字軸萬向節的不等速性。
在理論力學的運動學教學中,十字軸萬向節是如何運動的,以及兩軸轉動的角度關系是一個難點。在實驗室中通常將兩軸轉動的差異用電信號進行轉換處理,學生感到不夠直觀。為了解決這一問題,本文首先設計制作出一個簡單的萬向節模型,然后導出萬向節的轉角差異關系,最后設計制作出了一個改進的萬向節模型,可以讓學生直觀地看出兩軸轉動角度的差異。
1 簡化版的萬向節設計及制作
十字軸萬向軸的要點是:主動軸與從動軸的夾角可以在一定范圍內變化,十字軸繞其中心點做定點運動。因此在設計時要考慮這兩個因素。
利用 AutoCAD軟件進行設計,利用激光切割機對密度板進行加工,可以很快獲得十字軸的零部件(圖1)。設計中考慮了接口的過盈配合,不需要膠水就可以把框架拼好(圖2)。
十字軸的連接軸也用密度板來實現,框架與連接軸之間留有微小縫隙,拼裝好后可以靈活轉動(圖3)。萬向節的底板分為兩大塊,兩者可相對做圓周運動且始終保持接觸,以方便圓弧邊緣有刻度顯示主動軸與從動軸的夾角;底板上可以插上立柱,而立柱可與十字軸連接(圖4)。

圖1 十字軸的零部件

圖2 軸的拼裝
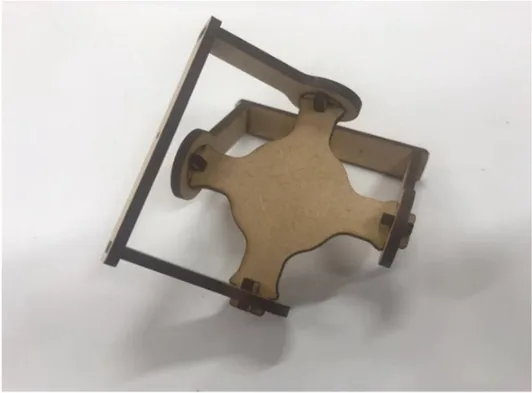
圖3 十字軸的連接
用2根鐵軸分別連接十字軸兩端的邊框,并分別插到底板立柱的孔中,就做好了一個簡版的十字軸萬向節,它可以實現兩軸平行(圖5)以及兩軸有偏角(圖6)時的運動演示,很直觀。

圖4 可以改變角度的底座
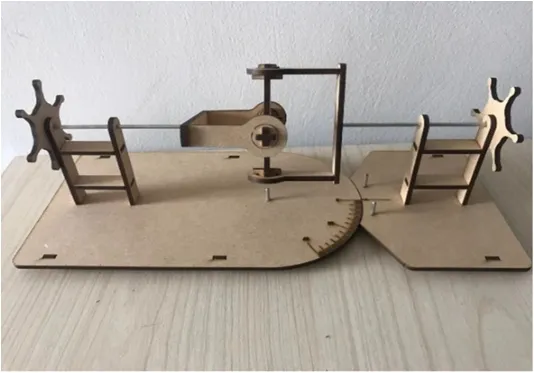
圖5 兩軸平行情況

圖6 兩軸有偏角情況
激光切割的精度很高,誤差在0.1 mm以內,所以整個裝置拼好后,精度還是比較高的。當然以后如果可以用金屬來加工,誤差可以更小,摩擦也更小,演示效果也會更好。
2 萬向節的轉動角度關系
結合簡易版的萬向節模型,可以做運動分析,下面特別關注兩軸的轉角差異問題。
萬向節的運動坐標系如圖7所示,所有坐標原點均在O點,但為了方便觀看,圖中原點放在不同的位置。固定坐標系x0y0z0,初始時刻動坐標系x1y1z1與x0y0z0重合,且主動軸OM固連,OM軸沿x1方向,OA沿y1方向;動坐標系x2y2z2與從動軸ON固連,ON軸沿x2方向,OB沿z2方向;假設OMN始終在x0y0平面內,OM軸與ON軸的夾角為偏角α;OM軸轉動φ1后A到了A′,動坐標系變為x3y3z3;ON軸轉動φ2后B到B′,動坐標系變為x4y4z4。
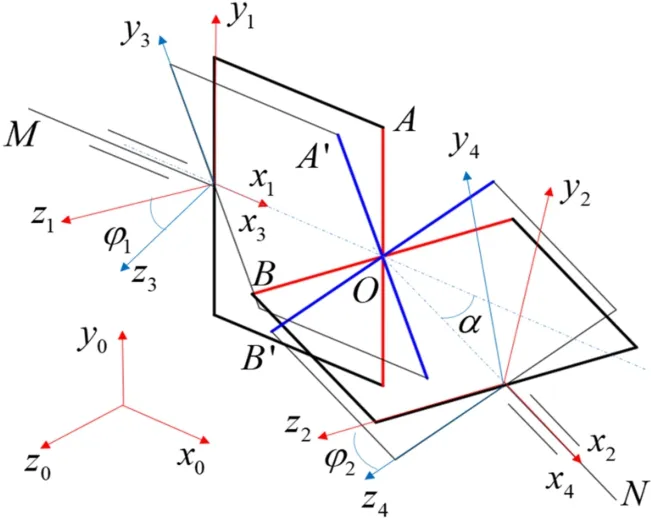
圖7 萬向節的運動分析
在這種假設條件下,A01是單位矩陣,其余各坐標系之間的方向余弦矩陣為
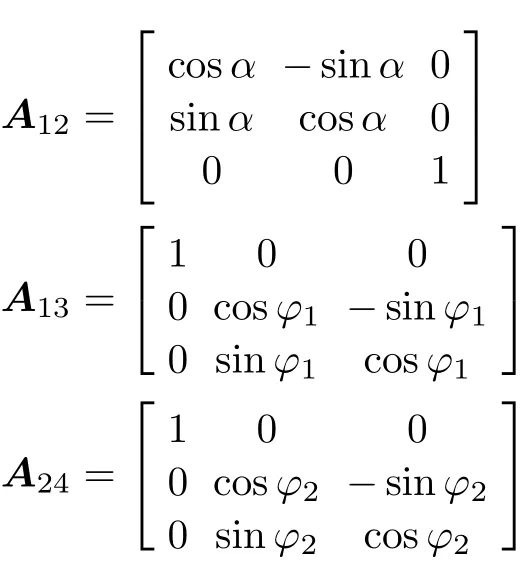
設rA′表示從O到A′的矢量,而表示rA′在坐標系xiyizi中的列陣,根據矢量的列陣在不同坐標系之間的轉換關系,則有

因為OA′垂直于OB′,有rA′·rB′=0,或,代入式(1)和式(2)后有

從而得到

由此可見萬向節兩軸的轉動角度是不同的,設Δφ=φ2-φ1,式(3)可以變化為

圖 8顯示了不同偏角情況下兩軸轉角的差異。偏角α越大,兩軸轉角的差異就越大。

圖8 不同偏角時兩軸差異的關系
進一步對式(3)兩邊求導,可以得到

即兩軸角速度之比也隨時間周期性變化。
通常在理論力學求解萬向節角速度的習題中,會有意識地讓φ1=0或φ1=π/2,就是為了避免復雜的運動學分析,但這也容易讓學生誤解,以為兩軸角速度之比是常數。
3 改進版的萬向節的設計及制作
為了直觀看出萬向節兩軸轉角的差異,可以巧妙利用錐齒輪,把兩個非平行的轉軸變為兩個平行的轉軸,再類似鐘表的處理方式,把兩個平行軸變為共軸的“分針”和“秒針”轉動,這樣就可以通過“分針”和“秒針”的夾角,直接看出兩軸轉角的差異。
具體設計中的要點是:在裝置示意的俯視圖(圖 9)和正視圖 (圖 10)中,齒輪C通過錐齒輪與OM軸連接,然后與齒輪D1連接;齒輪E通過錐齒輪與ON軸連接,然后與齒輪D2連接。而齒輪D1和D2共軸且軸的延長線過O點。
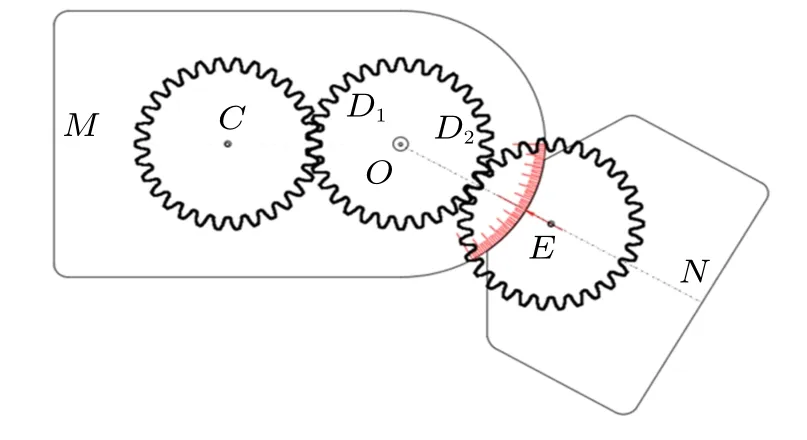
圖9 齒輪的位置安排(俯視圖)

圖10 齒輪連接關系(正視圖)
這樣的設計保證了當ON軸和OM軸保持不同的偏角α時,齒輪E總可以與齒輪D2嚙合。共軸設計將OM和ON的轉角同時在齒輪D1和D2中反映出來,再將指針分別與D1和D2齒輪固接,就可以通過看兩指針夾角的變化,直觀地看出萬向節兩軸轉角的差異。
圖11和圖12是改進后的裝置,其中C,D,E齒輪的齒數還可以適當改變,目的是將兩軸轉動的差異進行放大。

圖11 把水平軸變為豎直軸

圖12 變為共軸運動
猜你喜歡
英語世界(2023年10期)2023-11-17 09:19:16
汽車實用技術(2022年10期)2022-06-09 11:16:58
音樂探索(2022年2期)2022-05-30 21:01:37
收藏界(2019年3期)2019-10-10 03:16:40
小天使·一年級語數英綜合(2019年8期)2019-08-27 02:23:00
中國特種設備安全(2018年11期)2019-01-08 02:08:32
小學科學(學生版)(2018年7期)2018-08-13 09:33:04
中國非營利評論(2017年1期)2017-11-09 03:09:10
海外華文教育(2017年8期)2017-11-07 04:42:02
現代語文(2016年21期)2016-05-25 13:13:50