扭桿式履帶車輛機電懸架的非線性隨機最優振動控制1)
2021-01-06 05:16:44嚴京璽宋慧新宦榮華朱位秋浙江大學航空航天學院杭州310027
力學與實踐 2020年6期
嚴京璽 夏 磊 宋慧新 宦榮華,2) 朱位秋(浙江大學航空航天學院,杭州310027)
?(中國北方車輛研究所,北京100072)
現代戰爭對履帶車輛行駛的平穩性提出了更高的要求,運行平穩性對于改善作戰人員作戰環境與提高履帶車輛行進間火炮射擊精度有著極其重要的意義[1]。而要讓履帶車輛適應復雜多樣的戰爭地形,先進的懸架系統至關重要。履帶車輛懸架系統連接車體與負重輪,一般包含彈性支撐元件和減振裝置等,具有緩沖地面沖擊、減少車體振動的作用,一般可分為被動、主動與半主動三種類型。當前國內履帶車輛多采用被動懸架,然而由于被動懸架剛度與阻尼無法調節,已經無法滿足現代戰爭的高要求。半主動懸架由于結構簡單、能耗較低、相對可靠等優點,具有較好的應用前景,其中最典型的就是利用磁流變阻尼器的半主動懸架。然而磁流變阻尼器具有易沉淀等缺陷,離實際應用還有一段距離。主動懸架能夠根據車體實時狀態提供主動力,故而在合適的控制策略下,可以起到很好的控制效果。當前,世界各國都致力于主動控制履帶車輛懸架的研究,英、美等發達國家已經率先研制出了一些型號的主動懸架履帶車輛,而我國在這方面的研究還不夠成熟。有效的控制策略是半主動和主動懸架的核心技術,不合適的控制算法不僅不能減小車體振動,還可能會引起車體更大振動甚至失穩。國內外學者對車輛懸架的控制方法進行了大量的研究[2-7]。現有的控制策略主要分為三類[8],第一類適用于簡單的控制系統,以“天棚”控制[9]為代表,這種控制方法設計簡單但控制效果不夠理想。第二類適用于線性時不變系統,主要有線性最優控制[10]、最優預見控制[11]等。第三類適用于強非線性系統,主要有模糊控制[12]、神經網絡方法等,這些算法都不是基于精確數學模型,雖然具有較好的魯棒性,但是控制效果有限。扭桿式空氣彈簧懸架由于空氣彈簧和扭桿的斜置設計,在復雜路面上運行時表現出非常強的非線性特征,這類懸架的隨機振動控制一直以來都是一個難點問題。近20多年來,浙江大學朱位秋團隊對多自由度強非線性隨機振動系統的最優控制進行了系統而深入的研究[13-15],為本文的研究提供了理論基礎。
本文基于隨機最優控制理論方法,研究了扭桿式履帶車輛機電懸架的非線性隨機最優控制。首先基于空氣彈簧的非線性模型[16-18],建立了扭桿式機電懸架的非線性隨機動力學模型。隨后,根據隨機動態規劃原理建立并求解機電懸架系統相應的動態規劃方程,考慮到電機執行器的執行能力有限,確定了隨機最優有界控制律。最后,通過仿真分析對提出控制規律的控制效果進行了評估,并且討論了控制力時滯對控制效果的影響規律。
1 懸架系統建模
扭桿式履帶車輛一般由車體和多個負重輪組成,單個負重輪和車體之間通過扭桿、空氣彈簧和電機作動器連接組成懸架系統。由于實際運行過程中,每個懸架系統是通過電機作動器獨立控制的,因此,本文主要研究單個懸架的隨機最優控制問題,其簡化模型如圖1所示。
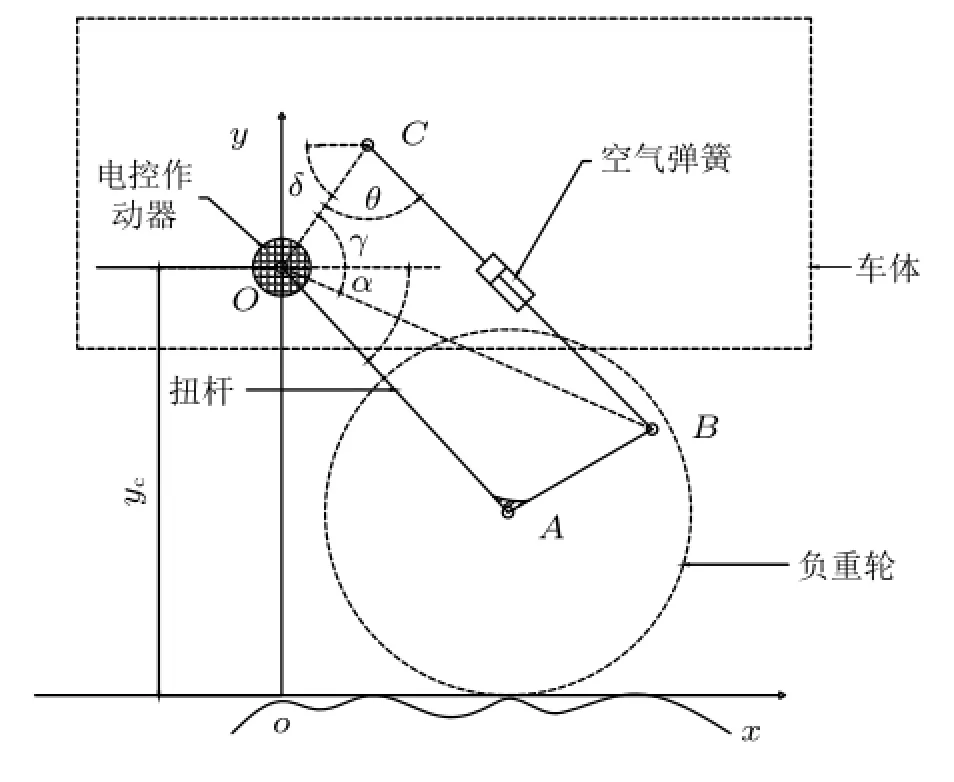
圖1 履帶車輛機電懸架系統模型簡圖
懸架系統具有兩個自由度,分別為車體的垂向運動與扭桿的轉動,分別用yc與轉角α表示。車輪通過履帶與地面接觸,車輪與地面的接觸一般表示為接觸剛度為kw的彈簧,其原長設為r0。x軸表示路面基準線,路面激勵用隨機過程yr(x)表示,通常可以用路面不平順譜來描述其統計特性。圖1中δ為OC與水平的夾角,θ為OC與BC的夾角,γ為OC與OB的夾角。
負重輪通過空氣彈簧與車體連接并對車體進行支撐,空氣彈簧簡化模型如圖2所示。空氣彈簧結構和動力學參數如表1所示。


表1 空氣彈簧參數
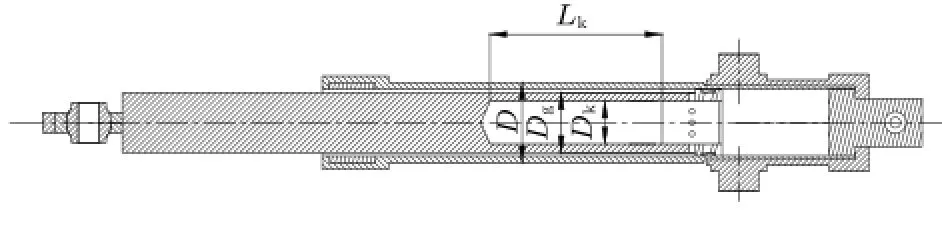
圖2 空氣彈簧模型
根據空氣彈簧的結構,建立其力學模型為
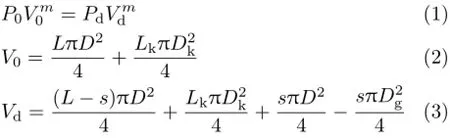
式中,V0與P0分別為空氣彈簧初始體積與初始壓強,Vd與Pd分別為活塞運動s時的空氣體積與壓強,F為活塞桿受力。由幾何條件可得

由第二類拉格朗日方程可得懸架系統的運動微分方程

式中,g為重力加速度,mc為車體質量,mw為負重輪質量,kr為扭桿扭轉剛度,Qα為由空氣彈簧與電機作動器所產生的廣義外力
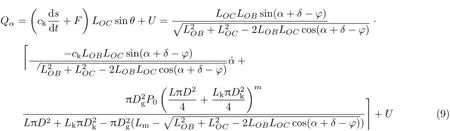
式中,U為電機作動器所產生的主動控制力矩。
由方程式(7)和方程式(8)可得系統靜平衡方程


式中,y0與α0為系統靜平衡時候車體垂向位移和扭桿轉角,可由方程式(10)和方程式(11)求解得到;Qα0為靜平衡時的廣義外力。
將方程式(7)和方程式(8)與方程式(10)和方程式(11)相減可得懸架系統的振動方程

式中,u=yc-y0為車體垂向相對位移,λ=α-α0為扭桿相對角位移。Qλ為

方程式(13)和方程式(14)中,yr為路面不平順隨機載荷。可以看出,懸架系統實際上是一個受控的隨機激勵的強非線性系統。本文主要目的是根據動態規劃原理設計一個控制規律來對該系統的非線性隨機振動進行有效控制。
2 非線性隨機最優有界控制
路面不平順載荷模型化為一個隨機過程yr(t),通常由路面不平順譜描述其統計量

式中,ω0為最低截止角頻率,n0為參考空間頻率,v為車輛行駛速度,Gyr(n0)為路面功率譜密度。該不平順通常可由一個高斯白噪聲過程經一階微分方程濾波得到

式中,W(t)為單位強度高斯白噪聲。根據不同Gyr(n0)值可將路面不平度分為不同等級。

其中

實際運行過程中履帶車輛所產生的電能是有限的,所以提供給每個電機作動器的電能也是有限的,從而導致作動器的執行能力受到限制。這個限制條件會影響實際控制力的執行效果,本文將設計考慮執行限制時的最優控制規律。設控制力的限制由如下約束描述

式中,Ud和Uu分別表示電機作動器的控制力下限和上限。
對于一個振動系統,以其振動響應最小為目標的最優控制通常用一個性能指標表示

式中,E[·]為期望算符,tf為控制終時,f為成本函數,ψ為控制終值函數。f和ψ的函數具體形式由實際控制問題決定,對于線性系統的線性隨機最優控制問題,f通常取狀態向量的二次型。方程(18)~(22)構成了扭桿履帶車輛機電懸架系統的非線性隨機最優控制問題。
基于隨機動態規劃原理建立方程式(18)~(22)相應的動態規劃方程
式中,V是值函數,tr[·]為跡算符,e為單位陣。
在限制條件(21)下對動態規劃方程式(23)等號右邊取極小值,從而得到最優有界控制力形式為

式中,sgn(·)為符號函數,其正負號由BT?V/(?Z)確定。可以看出,最優控制力是分段式非線性形式。
3 結果與討論
對于12負重輪扭桿式履帶車輛,機電懸架系統基本參數為:1/12車體質量mc=2000 kg,負重輪質量mw=100 kg,扭桿扭轉剛度kr=20 kN·m/rad,扭桿預調角度ˉα=0.53 rad,負重輪支承彈簧剛度kw=6.0×105N/m,負重輪支承彈簧原長r0=0.35 m。控制力下限Ud=-3000 N·m,上限Uu=3000 N·m,車輛時速v=25 m/s。
利用上述車體懸架和路面不平順參數計算得到控制前后懸架系統的振動響應及其統計量,如圖3~圖5 和表2所示。
圖3 (a)為被動與主動懸架車體垂向位移響應時程曲線。被動懸架是指電機作動器不起作用,僅在空氣彈簧和扭桿彈性支撐作用下的車體響應,主動懸架是按式(24)確定的最優控制下的車體響應。可以看出,車體在主動控制下的垂向振動響應比被動下的振動響應有顯著降低。圖3(b)~圖3 (d)分別為被動與主動控制下車體垂向位移、速度和加速度的頻域(power spectral density,PSD)曲線。可以看出主動控
圖3 控制前后車體垂向振動響應
圖3 控制前后車體垂向振動響應(續)
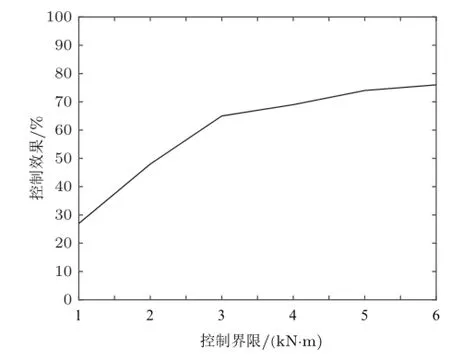
圖4 控制界限U對控制效果的影響
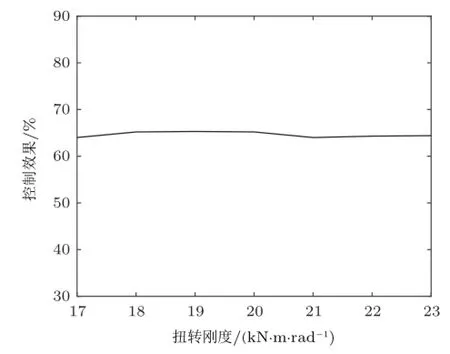
圖5 扭轉剛度對控制效果的影響
制力對車體在低頻區間內的垂向位移、速度和加速度都有不同程度的降低。對于履帶作戰車輛而言,低頻振動的抑制至關重要。車體垂向位移的降低有利于提高履帶車輛行進間的打擊精度,垂向速度的降低有利于提高履帶車輛上載觀瞄設備的觀瞄精度,而垂向加速度的降低有利于提高成員的乘坐舒適度。
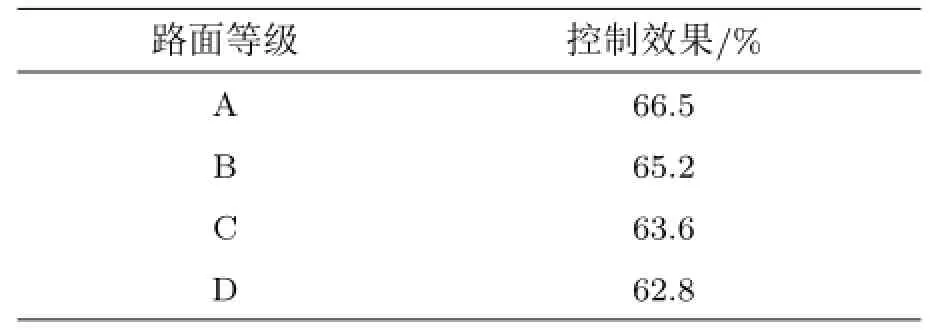
表2 不同路面等級下的控制效果
表2 顯示了提出的控制策略在不同等級路面下對車體垂向振動的控制效果。控制效果用主動控制下車體垂向速度響應均方值相比于被動懸架響應均方值的減少百分比來衡量。可以看出,隨著路面不平順度的加強,履帶車輛受到的隨機載荷強度增加,控制方法的控制效果略有降低,但總體上能維持在60%以上。值得提出的是,我們假設在不同路面等級上電機作動器的執行能力是一樣的,即具有相同的Ud和Uu值。圖4顯示了控制力界限|Ud|=Uu=U對控制力執行效果的影響規律。可以看出,隨著電機作動器控制力界限的提高,控制力對車體垂向振動的控制效果逐漸增大。因此,在滿足履帶車輛其他部件能量供應后,適當提高電機作動器的電能供應或者更換更大作動力的作動器有利于提高控制效果。
實際履帶車輛運行環境非常復雜,在運行過程中懸架系統的結構參數有時會發生改變。圖5顯示了扭轉剛度變化對控制效果的影響。可以看出,在±3 kN·m/rad的扭轉剛度變化范圍內,控制效果也穩定在60%~70%。由此可見,提出的最優控制對于扭轉剛度變化具有較好的魯棒性。
在實際控制中,時滯現象是不可避免的,傳感器采集和傳遞數據、作動器的作動過程均存在時間滯后。大量理論工作已經顯示,控制力時滯對控制效果具有非常重要的影響。因此本文研究了時滯對車體振動控制效果的影響規律。根據式(18)建立含時滯的系統方程

式中,τ為時滯時間。在其他參數不變的條件下對系統進行計算分析,得到時滯對控制效果的影響,如圖6所示。可以看出,控制力時滯對控制力的執行效果具有很大影響。總體上,隨著時滯時間的增加,控制力的控制效果逐漸降低。時滯時間小于0.15 s時,受控車體垂向振動均方響應隨時滯變化比較緩慢,并且一直小于被動控制的均方響應,表明控制力還具有一定的控制效果。然而當時滯大于0.15 s之后,受控車體的均方響應快速增大,此時控制力不僅沒有起到抑制振動的效果,反而導致車體振動響應增大。因此,提高傳感器數據采集和作動器作動效率,減小時滯時間對履帶車輛的主動控制具有重要意義。
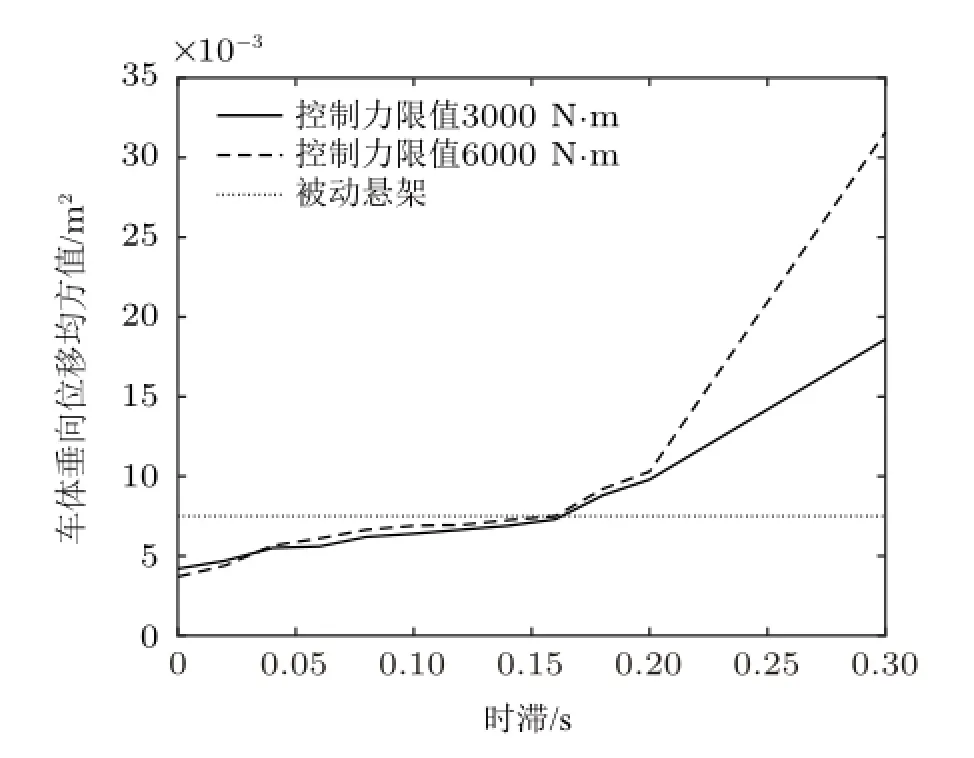
圖6 時滯對車體垂向位移響應均方值的影響
4 結論
本文研究了扭桿式履帶車輛機電懸架非線性隨機振動的最優控制。由于負重輪斜式放置和空氣彈簧非線性,扭桿式履帶車輛的懸架系統具有強非線性特征,在路面不平順作用下會產生劇烈非線性隨機振動。本文基于隨機動態規劃原理,確定了考慮電機作動器有界時車體懸架的非線性隨機最優控制策略,并通過計算分析了最優控制力對車體垂向振動的抑制效果。主要結論如下:
(1)最優控制對車體垂向振動的位移、速度和加速度都具有不同程度的抑制作用,有望同時提升履帶車輛行進間射擊精度、設備觀瞄精度和人員乘坐舒適度等。
(2)最優控制能適應不同等級的路面不平順載荷,可以通過適當提高電機執行器的執行界限來提高控制的執行效果。
(3)最優控制對車體懸架參數的變化具有較好的魯棒性,能在一定程度上適應復雜環境運行時履帶車輛系統參數的不確定變化。
(4)時滯對控制力的執行效果影響較為顯著,為保證控制力的執行效果,整個控制回路的時滯時間建議在0.15 s以內。
本文雖然只是針對單個懸架系統確定了隨機最優控制策略,但是由于履帶車輛的每個懸架都是獨立控制的,因此,該控制策略可以應用到履帶車輛的整車控制上,只是在整車控制時還需要考慮到整車電能在各作動器上優化分配問題。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
中老年保健(2021年12期)2021-11-30 02:58:01
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
Coco薇(2016年8期)2016-10-09 02:11:50
中國醫藥科學(2015年19期)2015-02-27 12:33:11
