基于DSP28335的某型靶機飛控系統設計
2020-10-22 01:52:18王道波周凌子
機械與電子 2020年10期
汪 浩,王道波,周凌子,季 偉
(南京航空航天大學自動化學院,江蘇 南京 210016)
0 引言
靶機屬于軍用無人機,用于在軍事演習或軍用武器試驗中,模擬敵方飛行器,為導彈或火炮等提供空中打擊目標。靶機上搭載自主飛行控制系統,在執行飛行任務時通常需要按指定航線自主飛行,依照期望的姿態與軌跡運動,同時能夠下傳飛行狀態信息至地面系統[1]。此外,靶機還需要接收地面人員的操控指令,當靶機需要執行任務設備或者靶機狀態異常時,地面人員能夠及時進行操控。
在整個“人在回路”的閉環控制系統中,靶機飛控系統負責接收、執行指令,調整飛行狀態,控制無人機各組件正常運行,接收各組件反饋,下傳信息至地面測控系統。在實際飛行之前,需要對靶機進行仿真實驗。在仿真實驗中,將飛控計算機、舵機、電臺等機載設備接入電路,由仿真計算機發送仿真數據至飛控計算機中,模擬實際飛行狀況,驗證飛控性能,同時可以檢查靶機各組件的工作性能是否穩定[2]。
1 控制器設計
無人機飛行控制系統是保障無人機正常飛行與執行任務的核心系統,如圖1所示。根據負反饋控制原理,飛控系統的控制回路可以劃分為三級,分別為舵回路、增穩和制導回路[3]。舵回路是最內層的伺服控制回路,舵回路與姿態傳感器等構成增穩回路,用于無人機飛行姿態的穩定與控制。舵回路、導航傳感器與制導解算構成制導回路,完成飛行航跡控制。
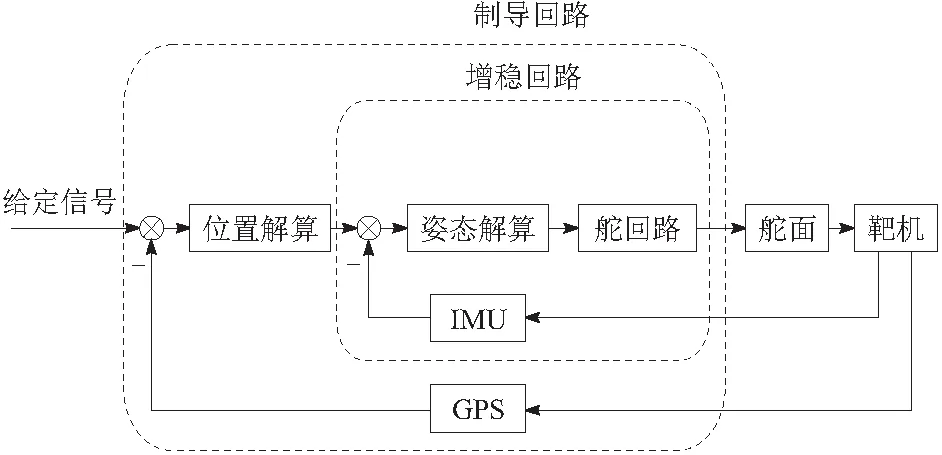
圖1 靶機控制系統結構
無人機的運動可以分解到縱向方向與橫向方向上,前者包含升降、俯仰與前后直飛,后者包括滾轉、偏航與左右側移,本文分別從這2個方面對靶機進行飛控設計[4]。
縱向運動的穩定與控制,主要在于對俯仰角的穩定與控制。通過操縱升降舵,一方面使得無人機在外部干擾下能保持期望運動狀態,另一方面要能夠響應控制指令。調整俯仰角度還可以改變無人機的飛行高度,因此俯仰姿態的控制是高度控制的內回路[5]。
1.1 縱向運動控制器
俯仰角控制回路如圖2所示。對于俯仰角的控制策略,本文采用PI控制。引入俯仰角速率的反饋,用于增加阻尼力矩,抑制俯仰角的波動,改善系統動態性能。積分環節有利于增加系統型別,有效降低穩態誤差,但系統相對穩定性會有所降低[6]。
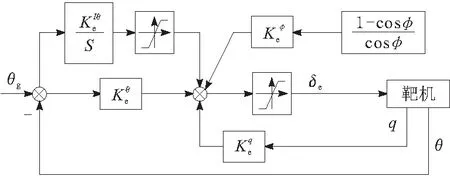
圖2 俯仰角控制回路
為防止積分環節的升降舵出舵量過大,需要加入限幅。此外,靶機滾轉時會引起高度降低,因此需要在俯仰角回路引入滾轉角的反饋。俯仰角控制律為
(1)

高度控制如圖3所示。采用PI控制作為高度控制律,俯仰角控制回路為內回路,同時引入高度變化率反饋信號,有利于增大系統阻尼。
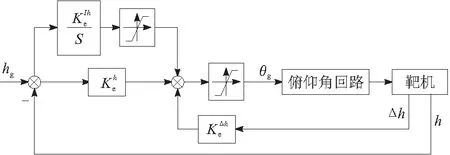
圖3 高度控制回路
高度控制律為
(2)

1.2 橫側向運動控制器
無人機的橫側向運動包含滾轉運動與偏航運動,滾轉角速度會引起偏航力矩,偏航角速度也會引起滾轉力矩,因此橫側向運動本質上是一個多變量控制系統。
相對于方向舵,副翼對于滾轉的操作性更強,該靶機采用副翼控制滾轉運動。滾轉角控制與俯仰角控制類似,控制結構如圖4所示。
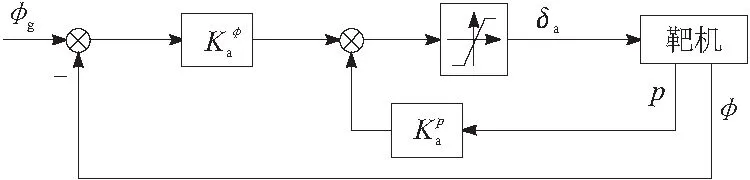
圖4 滾轉角控制回路
滾轉角回路采用比例控制,引入滾轉角速率反饋提高系統阻尼。
(3)

當需要改變無人機航向時,可以通過無人機滾轉運動產生升力,升力在水平方向分量為無人機圓周運動向心力,從而改變飛機航向角。在轉彎時應盡量減小側滑角,使航向角調節過程平滑。航向角控制如圖5所示。
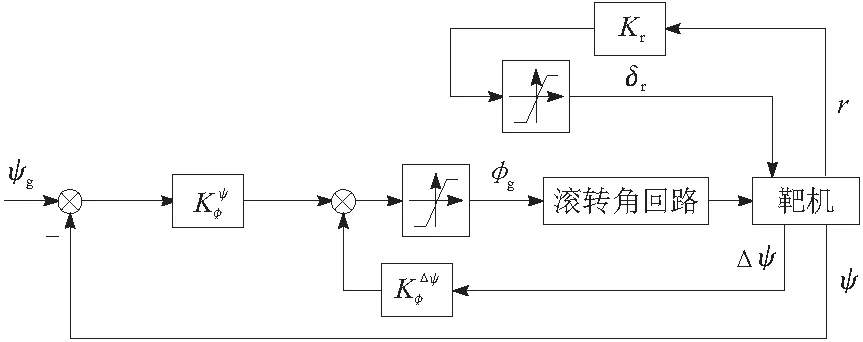
圖5 航向角控制回路
(4)
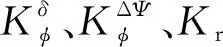
采用協調轉彎方式進行側向偏離控制器設計,通過操縱副翼舵完成側向偏離控制。為增加阻尼,需要引入側向偏離微分信號,而航向角信號與側向偏離微分信號近似成比例關系,因此側向偏離回路以航向角回路為內回路。側向偏離控制回路如圖6所示。
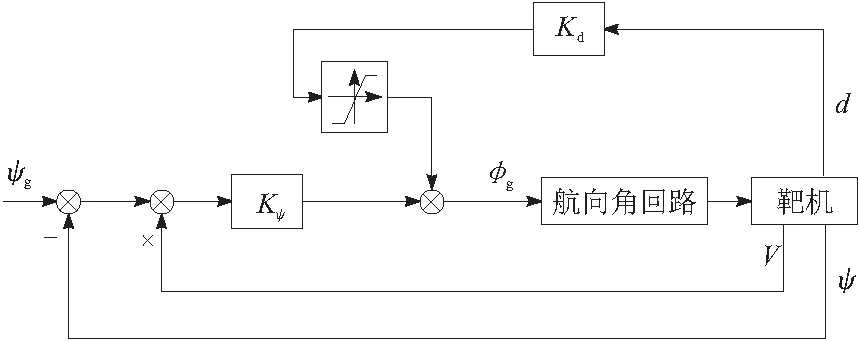
圖6 側向偏離控制回路
側向偏離控制律為
φg=KΨ(Ψg-Ψ)V+Kdd
(5)
Ψg為航向角給定;Ψ為航向角反饋;V為靶機速度反饋;d為航偏距;KΨ和Kd為側向偏離增益系數;φg為航向角回路輸入量。
2 飛控系統組件
2.1 組件分析
如圖7所示,從硬件層面考慮,靶機飛控系統有以下控制組件:飛控計算機、機載電臺、GPS、慣性導航(IMU)、發動機及轉速傳感器、各操縱舵面以及機載任務設備等[7]。
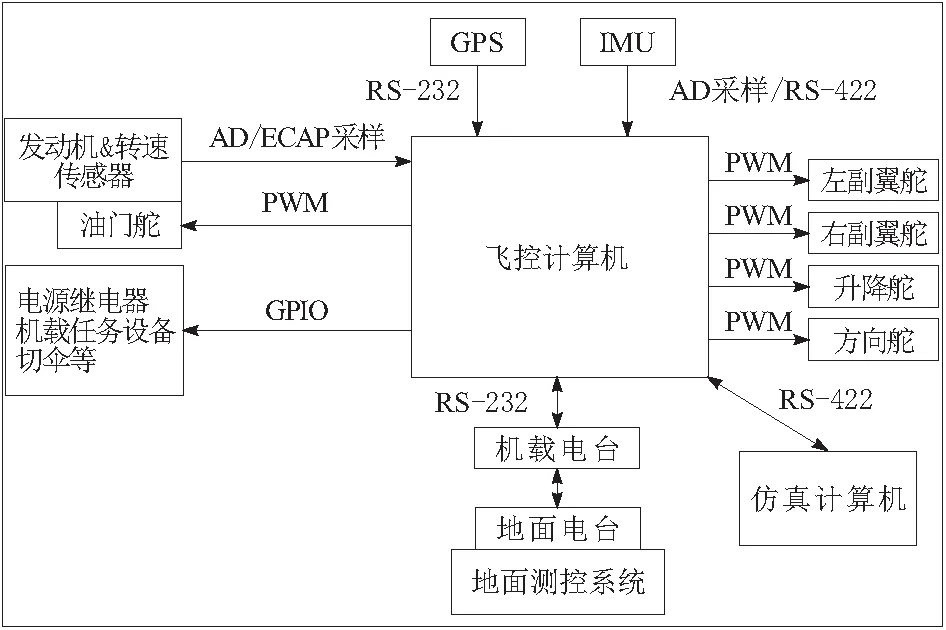
圖7 飛控系統組件結構
飛控計算機是靶機的控制中心,該靶機采用TMS320F28335作為飛控芯片,負責接收地面系統的指令,控制靶機飛行,下發指令給各執行機構,協調各機載子系統的工作,并接收靶機各組件的反饋,將反饋信息發送給地面系統[8]。
靶機配置兩路GPS,數據刷新頻率為10 Hz,遵循NEMA0186協議,飛控計算機中解算$GPGGA與$GPRMC數據,獲取時間、經緯度、高度、航速與航向等信息。優先使用GPSA的數據,當GPSA數據故障時,則飛控與地面測控系統自動切換使用GPSB。
靶機配備高頻電臺,與地面測控系統的電臺構成通信,實現超視距控制。通信系統的上行鏈路為遙控鏈路,下行鏈路為遙測鏈路。設置電臺波特率為38 400 B/s,該靶機遙測通信協議長度為52 B,一幀遙測數據時長約為11 ms。遙控通信協議長度為12 B,一幀數據時長約為2.5 ms。上行鏈路中包含靶機飛行與任務設備的控制指令,因此選擇在F28335的5 ms定時器中接收數據。而下行鏈路用于傳輸靶機飛行狀態信息,對數據率要求較低,選擇在50 ms定時器中發送數據。通信鏈路的延遲在起飛、巡航與著陸階段均滿足該靶機操控需求。
舵機為舵回路的執行機構,可以輸出力矩使舵面偏轉。該靶機采用電動舵機控制各舵面運動,在靶機調試環節,需要調節各級閉環回路的參數,確保給定角度量和舵面實際偏轉角度一致。其中,油門舵位于發動機進氣口,通過調節進氣量的大小,可以調整發動機轉速,該轉速由轉速傳感器采集。
2.2 信號輸入與輸出
在圖7中標注了飛控計算機與靶機各組件的信號輸入輸出方式,本節對此做具體說明。
SCI模塊為通用異步串行通信接口,主要應用于DSP處理器和PC機的RS232端口傳輸數據[9]。F28335有3個串行通信(SCI)模塊,其中,將SCIA應用于仿真PC機的數據輸入輸出,SCIC應用于慣導數據輸入。該靶機選用的慣導型號為THNC100-G1。慣導有兩路信號輸出,一路模擬量,另一路數字量RS422信號。兩路信號均輸入到飛控計算機中,模擬量接入AD采樣,RS422信號接MAX3490芯片,轉為RS232信號,接入F28335的SCIC端口,如圖8所示。
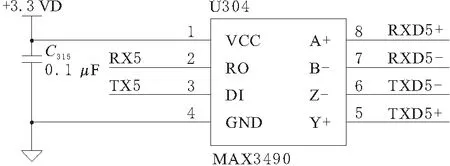
圖8 靶機RS422信號通道
慣導上電時,需要初始化30 s之后才能發送正常數據,導致SCI通信產生錯誤中斷標志位,因此需要在定時器中重新初始化SCI模塊,清除此錯誤中斷標志位。
與SCI通信類似,eCAP采樣也采用中斷方式。F28335的eCAP通道,可以檢測輸入引腳的電平跳變,并記錄跳變時刻時基計數器TSCTR的值[10]。在捕獲模式下,eCAP通道可以連續檢測4次跳變。轉速傳感器在發動機每轉一圈時能發出4次脈沖信號。因此發動機轉速n與eCAP采樣值關系為
(6)
f為系統時鐘頻率;T4為第4次電平跳變時刻的時鐘值;T1為第1次電平跳變時刻的時鐘值。
DI、DO模塊用于投放誘餌彈、靶機開傘等。以靶機開傘為例,靶機傘艙的封艙線路上放置電爆管,在地面操縱人員發送開傘指令后,飛控計算機通過GPIO口輸出高電平的電信號,引爆電爆管從而打開傘艙,靶機降落傘從中脫離并開傘。
UART模塊,由TL16C754芯片,擴展4路RS232信號,分別用于電臺通信、GPSA、GPSB與磁航向計。AD采樣模塊用于采樣慣導模擬信號、采樣機載電源電壓信息與發動機轉速模擬信號。PWM波為舵機的控制信號,占空比為5%~10%,飛控計算機通過調節PWM波占空比大小,可以控制各舵面的偏轉角度。
3 鐵存
在靶機的調試與起飛準備階段,經常需要更改航線數據與部分飛控參數。而F28335的FLASH存儲器需要通過JTAG仿真接口和CCS軟件進行擦寫,每次燒寫程序必須打開靶機的飛控機艙與飛控機箱。在RAM中的數據則會斷電丟失。因此,在DSP控制器中增設鐵電存儲芯片FM24V10,該芯片數據可以長期儲存,擁有1 MB存儲空間,能夠快速讀寫,數據可以斷電保存,相較EEPROM可靠性高、功耗低。將部分飛控參數、飛行航線等數據存入FM24V10,在需要初始化或者更改這些數據時,地面人員通過電臺通信,將數據發送至飛控計算機,F28335對鐵存進行寫操作。如果系統上電初始化,則對鐵存進行讀操作,讀取該類參數。如此便能實現航線與飛控參數的遠程調試與更改。
4 仿真實驗
該靶機配設仿真系統,可以輸出數學模型至F28335中,在實際飛行之前進行半物理仿真實驗,驗證飛控程序以及各執行機構性能。
預設航線如圖9所示,橫軸為靶機東向相對距離,縱軸為靶機北向相對距離。
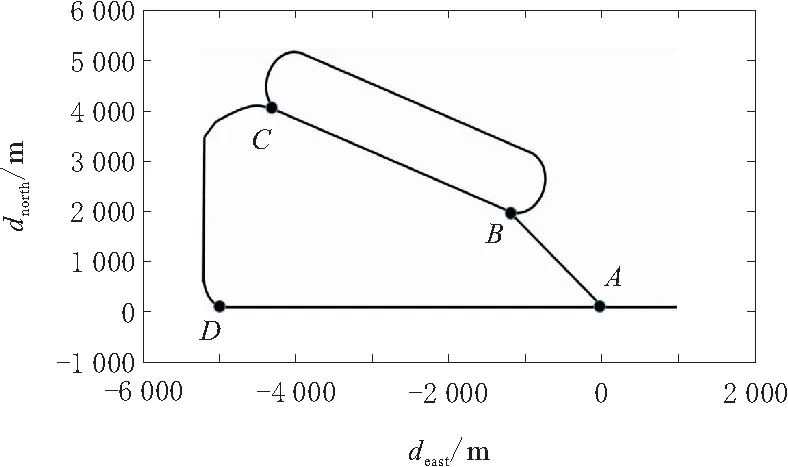
圖9 仿真預設航線
靶機起飛點為A點,初始航向約為-30°,從B點進入橢圓軌道順時針飛行2圈,在C點飛出橢圓軌道,在經過D點后,直飛至起飛原點開傘降落。在巡航階段,靶機定高1 000 m。
仿真實驗的三維航跡如圖10所示。仿真實驗的高度如圖11所示。

圖10 仿真航跡
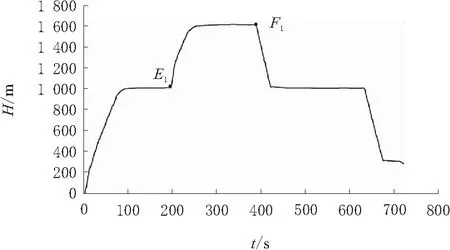
圖11 仿真高度
在仿真飛行中,在圖11的E1點(對應圖10的E2點)調整靶機定高為1 600 m,靶機向上爬升至1 600 m,在圖11的F1點(對應圖10的F2點),調整靶機自主飛行,則靶機按照預設航線,自主調整巡航高度為1 000 m。最后靶機返回起飛原點開傘,在地面測控顯示開傘時,經測量開傘線路電壓為8.6 V,表明硬件線路有效。
5 結束語
該靶機飛控系統控制策略較為有效,飛控計算機與各機載子系統能夠協調工作。仿真實驗中,靶機基本按照預設航線飛行,且在飛行過程中隨時可以進行有效的人工操縱,符合實用需求。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25