基于Simulink的無刷直流電機伺服控制仿真研究
2020-10-14 13:51:55羅明宇
大眾科學·下旬 2020年1期
關鍵詞:仿真
羅明宇
摘 要:在分析無刷直流電機(Brushless DC Motor,以下簡稱為 BLDCM)數(shù)學模型的基礎上,提出了無刷直流電機控制系統(tǒng)建模的新方法。在Matlab/Simulink中,建立獨立的功能模塊 [1],然后再將這些功能模塊進行有機整合,組建無刷直流電機伺服控制系統(tǒng)模型。
關鍵詞:無刷直流電機;伺服控制;Matlab;Simulink;仿真
中圖分類號:V242.4 ? TP242.2
前言
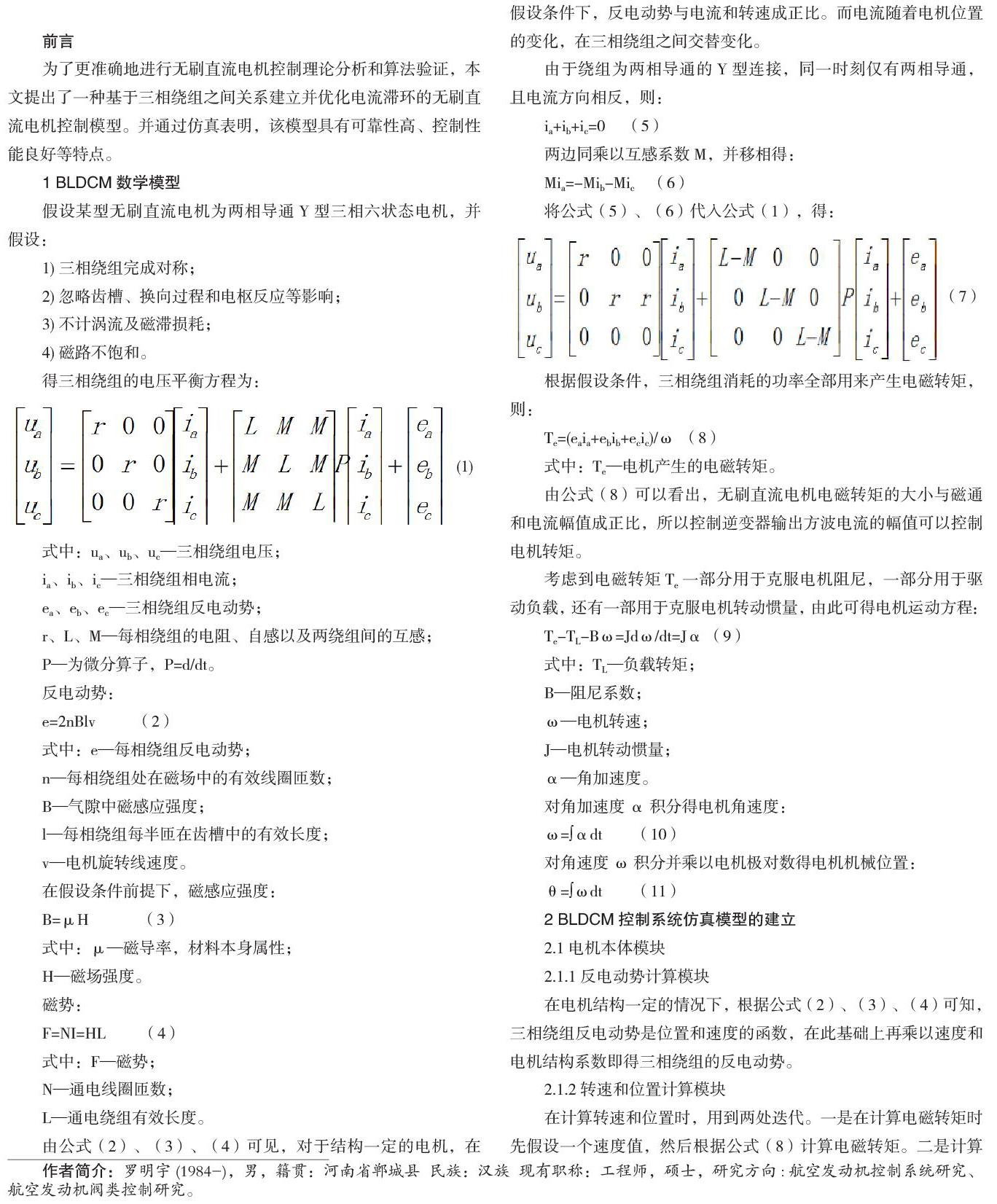
為了更準確地進行無刷直流電機控制理論分析和算法驗證,本文提出了一種基于三相繞組之間關系建立并優(yōu)化電流滯環(huán)的無刷直流電機控制模型。并通過仿真表明,該模型具有可靠性高、控制性能良好等特點。
1 BLDCM數(shù)學模型
假設某型無刷直流電機為兩相導通Y型三相六狀態(tài)電機,并假設:
1)三相繞組完成對稱;
2)忽略齒槽、換向過程和電樞反應等影響;
3)不計渦流及磁滯損耗;
4)磁路不飽和。
2 BLDCM控制系統(tǒng)仿真模型的建立
2.1電機本體模塊
2.1.1反電動勢計算模塊
在電機結構一定的情況下,根據(jù)公式(2)、(3)、(4)可知,三相繞組反電動勢是位置和速度的函數(shù),在此基礎上再乘以速度和電機結構系數(shù)即得三相繞組的反電動勢。
2.1.2轉速和位置計算模塊
在計算轉速和位置時,用到兩處迭代。一是在計算電磁轉矩時先假設一個速度值,然后根據(jù)公式(8)計算電磁轉矩。二是計算轉速時利用上述假設的速度值乘以阻尼系數(shù),然后利用公式(9)計算角加速度。最后再根據(jù)公式(10)計算出速度,并利用計算速度值修正假設速度值,反饋到公式(8)、(9)迭代計算,直至收斂。此外在利用公式(11)計算角度時,由于對于大于2π的機械角度計算不方便,需要將機械角度限制在2π范圍內,因此用一個對2π求余的模塊,對機械轉角進行回繞。
2.2控制器模塊
控制器采用PI算法,主要是根據(jù)給定轉速和反饋轉速計算的差值計算控制電流。
2.3參考電流模塊
參考電流主要是根據(jù)電流和位置的關系,將控制器輸出的控制電流按位置分配給不同的繞組。根據(jù)中電流的矩形波形,參考電流模型采用邏輯開關計算,當某狀態(tài)區(qū)間滿足相應的電流條件時,邏輯為開,輸出相應的矩形電流,否則輸出零電流。
2.4電流滯環(huán)模塊
電流滯環(huán)模型主要模擬處理器輸出的PWM信號,該信號輸出給三相全橋電路,用于控制三相全橋電路的六個開關的打開/關閉。但要注意兩點:一是同橋的上、下橋臂開/關狀態(tài)互斥,即如果上橋臂開,則下橋臂必須關,反之亦然;二是將六路PWM按控制的橋臂分為三組,則當一組的H和另一組的L輸出斬波時,第三組的H和L均輸出零。根據(jù)以上原則,電流滯環(huán)模型采用布爾操作。
2.5三相全橋模塊
無刷直流電機的三相全橋電路,由6個MOS管組成。
2.6 BLDCM控制系統(tǒng)仿真模型
將以上模塊串聯(lián)起來,并考慮速度環(huán)、位置環(huán)、電流環(huán)構成的小閉環(huán),以及三相繞組特性參數(shù)的差異所引入平均補償電壓un(在公式(7)后面加un列向量,然后三相電壓相加即可求出),可得到BLDCM控制系統(tǒng)仿真模型。
3仿真結果
將上述建立的模型進行仿真分析,根據(jù)某型無刷直流電機控制系統(tǒng)數(shù)據(jù),設定相關仿真參數(shù):極對數(shù)2,額定電壓56V,額定電流4.2A,繞組電阻2.8Ω,繞組自感5mH,繞組互感0mH,轉動慣量0.005kg.m2,阻尼系數(shù)2e-4N.m.s/rad,感應電動勢系數(shù)0.028V/(rad.s-1),負載轉矩0.8N.m,仿真采用變步長ode45算法,仿真時間10s。在第2s給定轉速1000r/min,仿真結果如下:
a)未給定轉速時,電機反饋轉速為0r/min;在第2s給定轉速1000r/min時,反饋轉速從0r/min到給定轉速響應時間為0.66s,超調量為0,穩(wěn)態(tài)誤差值1r/min,誤差百分比0.1%。
b)當電機轉速為0r/min時,感應電動勢為0V;當電機轉速為1000r/min時,感應電動勢為梯形波,最大值為16.4V。
c)當電機轉速為0r/min時,相電流最大1.08A;在第2s給定轉速1000r/min時,瞬態(tài)電流最大,最大值為10A;當電機轉速穩(wěn)定在1000r/min時,相電流穩(wěn)定在額定電流4.2A。
d)當電機轉速為0r/min時,平均電磁轉矩為0N.m;在第2s給定轉速1000r/min時,瞬態(tài)電磁轉矩最大,最大值為3.08N.m;當電機轉速為1000r/min時,平均電磁轉矩最大值為0.82N.m。
從以上分析可見,該無刷直流電機控制系統(tǒng)轉速響應時間快、無超調、穩(wěn)定性好,同時感應電動勢、相電流、電磁轉矩的波形和大小均符合預期設計要求,仿真模型可靠有效。
4結語
結果表明,該無刷直流電機控制系統(tǒng)轉速響應時間快、無超調、穩(wěn)定性好,同時感應電動勢、相電流、電磁轉矩的波形和大小均符合預期設計要求,模型滿足系統(tǒng)靜、動態(tài)要求。本文仿真模型由不同功能的子模塊搭建組合而成,修改相關參數(shù)或變更控制方案簡單易行,可為研究無刷直流電機的控制系統(tǒng)提供參考。
參考文獻:
[1] 譚建成,無刷直流電機技術[M],北京,機械工業(yè)出版社,2011:22-182.
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業(yè)管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數(shù)字技術與應用(2016年9期)2016-11-09 23:25:33
數(shù)字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
