基于卡爾曼濾波融合算法的深松耕深檢測裝置研究
2020-10-10 06:32:54蔣嘯虎馬云海李金光吳寶廣孫霽宇
農業機械學報 2020年9期
蔣嘯虎 佟 金 馬云海 李金光 吳寶廣 孫霽宇
(1.吉林大學生物與農業工程學院, 長春 130022; 2.賓夕法尼亞州立大學農業科學與工程學院, 斯泰特克里奇 PA 16802; 3.吉林大學工程仿生教育部重點實驗室, 長春 130022)
0 引言
耕深是翻耕土壤時的一項重要技術指標,不同耕作方式、不同土壤類型、不同作物對耕深的要求均不相同[1-6],耕深對作物根系生長、機具作業能耗和作業質量有重要影響[7-10]。因此,準確檢測耕深對評估作物長勢、實時調節耕深具有重要意義,可為建設高標準農田提供數據支撐。
耕深檢測最初采用手工測量,但手工測量效率低,不能進行連續檢測[11]。隨著電子技術的發展,各種傳感器被用于耕深檢測,如超聲波傳感器、紅外傳感器等通過測量機架與地面之間的距離檢測耕深[12-14],傾角傳感器、編碼器等通過機架角度的變化及幾何關系間接測量耕深[15-17]。土壤耕作時環境復雜,地表秸稈覆蓋、地表的起伏以及土塊等均會使超聲波傳感器接收回波存在誤差,導致耕深檢測不準確[18];傾角傳感器檢測耕深需利用仿形輪連桿角度變化或機架角度變化測量耕深,前者易受地形影響,后者在拖拉機改變懸掛方式時,由于幾何關系產生變化需要重新標定傳感器,且不便于在其他型號機具上使用,通用性差[19]。
目前,耕深檢測裝置大多采用單一傳感器,易受環境影響,且檢測精度較低。為提高耕深檢測精度、減小環境對耕深檢測的影響,本文采用兩傳感器聯合檢測耕深,即基于超聲波傳感器、紅外傳感器設計一種耕深檢測裝置,并利用卡爾曼濾波方法將兩種傳感器的檢測數據進行濾波融合。
1 耕深檢測裝置設計
1.1 傳感器選取
傳感器是檢測裝置的關鍵部件,本耕深檢測裝置選取AJ-SR04M型超聲波傳感器和GP2Y0A21YK0F型紅外傳感器,兩傳感器的指標參數如表1所示。工作時兩傳感器固定于機架下方,通過測量機架至地面的距離獲取耕深數據。
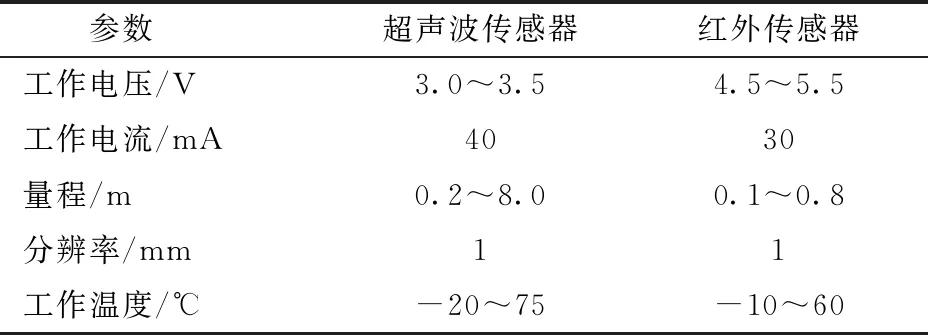
表1 傳感器指標參數Tab.1 Parameters of sensors
1.2 耕深檢測原理
超聲波傳感器采用渡越時間法測量耕深,圖1為超聲波傳感器測量耕深的原理圖。在深松作業前可通過標定提前測量超聲波傳感器發射端面至鏟尖的距離h1,深松作業時超聲波傳感器向地面發射超聲波并接收由地面反射的回波,通過記錄每次發射超聲波到接收回波的時間間隔Δt,便可計算出超聲波傳感器發射端面至地面的距離h2,即
(1)
式中vu——超聲波在空氣中傳播的速度
由此可知耕深h0為
(2)

圖1 超聲波傳感器耕深測量原理圖Fig.1 Principle diagram of ultrasonic sensor detecting tillage depth
紅外傳感器通過直射式三角測距法測量耕深,其測量原理圖如圖2所示。

圖2 紅外傳感器耕深測量原理圖Fig.2 Principle diagram of infrared sensor detecting tillage depth
根據Scheimpflug定律可知[20-21],當PQ為紅外傳感器的參考平面,此時紅外發射器至參考平面的距離l0、像距l1、物距l2、反射光線與入射光線的夾角α以及反射光線與紅外接收器的夾角β均為已知。在利用紅外傳感器測量耕深時,當測量到被測平面P′Q′與參考平面PQ的距離y時,可知紅外傳感器與被測平面的距離為y+l0,當被測平面與參考平面不重合時,反射光線在紅外接收器所呈的像會產生位移x,該位移x可由紅外傳感器直接測量得到,根據幾何關系可知
(3)
因此紅外傳感器測量耕深h0為
(4)
1.3 裝置樣機
通過3D打印技術制作耕深檢測裝置的殼體,其整體尺寸(長×寬×高)為12 cm5 cm4 cm。選取STM32F103C8T6單片機作為該耕深檢測裝置的處理器,STM32F103C8T6單片機具有40個引腳,除能滿足傳感器的控制連接外,多余引腳能用于后續功能擴展。為方便耕深檢測裝置的操作和數據顯示,選用5英寸電容觸摸屏(TJ8048T050_011R型)作為該裝置的顯示屏,該顯示屏通過串口與處理器連接,通過該觸摸屏可直接向處理器發送相關指令。同時該檢測裝置安裝有存儲芯片(AT24C02型),可存儲耕深檢測數據以便進一步研究。耕深檢測裝置樣機如圖3所示。

圖3 耕深檢測裝置樣機Fig.3 Prototype of tillage detecting device
2 基于卡爾曼濾波的傳感器數據濾波融合
卡爾曼濾波以及數據融合能夠從一系列的不完全及包含噪聲的測量數據中綜合估計系統的狀態,并且由于每次迭代只計算最新的測量數據,因此處理效率極高,被廣泛運用于工程、農業等領域[12, 22-24]。圖4是該耕深檢測裝置的工作流程圖,本文采用卡爾曼分布式融合測量[22,25-26],由前文的分析可知,測量傳感器至地面的距離是準確測量耕深的關鍵,因此設傳感器至地面的距離為該耕深檢測裝置的狀態量x,則系統預測方程為
(5)

Ai——狀態轉移矩陣,本文Ai=[1]
i=1時表示超聲波傳感器,i=2時表示紅外傳感器。
預測協方差為
(6)

圖4 耕深檢測裝置工作流程圖Fig.4 Flow chart of tillage depth detecting device
Pt-1,i——t-1時刻系統狀態協方差
Qi——系統過程噪聲,Q1=0.5,Q2=0.2
完成系統的預測后,可計算卡爾曼增益
(7)
式中Kt,i——卡爾曼增益值
Hi——系統觀測矩陣,Hi=[1]
Ri——觀測噪聲方差,R1=15,R2=10
因此,系統最優估計值為
(8)
zt,i——傳感器在時刻t的測量值
在完成系統估計值后,對系統協方差進行更新
(9)
式中Ii——單位矩陣
在同一地塊進行深松作業時一般要求耕深保持不變,即在作業前需提前設置預定耕深h′,該耕深檢測裝置可計算超聲波傳感器和紅外傳感器檢測數據與預定耕深h′的偏差δt,i,即
δt,i=t,i-h′
(10)
通過計算偏差平方和來確定兩傳感器的加權因子ωt,i,即
(11)
(12)
由此可得在t時刻的耕深融合值
xt=t,1ωt,1+t,2ωt,2
(13)
通過循環執行計算式(5)~(13),即可得到超聲波傳感器和紅外傳感器在各時刻的濾波數據和融合數據。
3 室內試驗
3.1 耕深檢測裝置靜態標定試驗
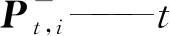
為檢驗該耕深檢測裝置超聲波傳感器、紅外傳感器及其濾波融合后測量數據的準確性,對耕深檢測裝置進行靜態標定。利用鎮壓輥將土壤壓實平整后,分別將傳感器與地表距離設置為25、30、35、40、45、50 cm進行檢測。完成平整地的靜態標定后,在地表均勻覆蓋秸稈然后在上述不同高度分別進行測量。
靜態標定測量數據如表2所示,在無秸稈覆蓋的平整地面,超聲波傳感器最大測量誤差1.16 cm,平均誤差為0.83 cm,均方根誤差為0.86 cm。由表2可知,在平整地面超聲波傳感器測量數據整體略大于實際測量距離,這是由于超聲波傳感器采用渡越時間法測距,而單片機在處理指令時需要額外的時間,造成時間間隔Δt大于超聲波實際傳播時間,由式(1)可知,此時超聲波測量距離大于實際距離。紅外傳感器最大測量誤差為0.60 cm,平均誤差為0.09 cm,均方根誤差為0.41 cm。由表2可知,紅外傳感器測量數據在實際距離附近略有波動,這是由于紅外傳感器采用的三角測量法不受測量時間的影響,但是紅外傳感器本身的零點漂移等造成了數據的波動。平整地面濾波融合數據的最大測量誤差為0.66 cm,平均誤差為0.20 cm,均方根誤差為0.40 cm。濾波融合數據的檢測精度優于超聲波傳感器的檢測精度,與紅外傳感器測量數據較為接近。
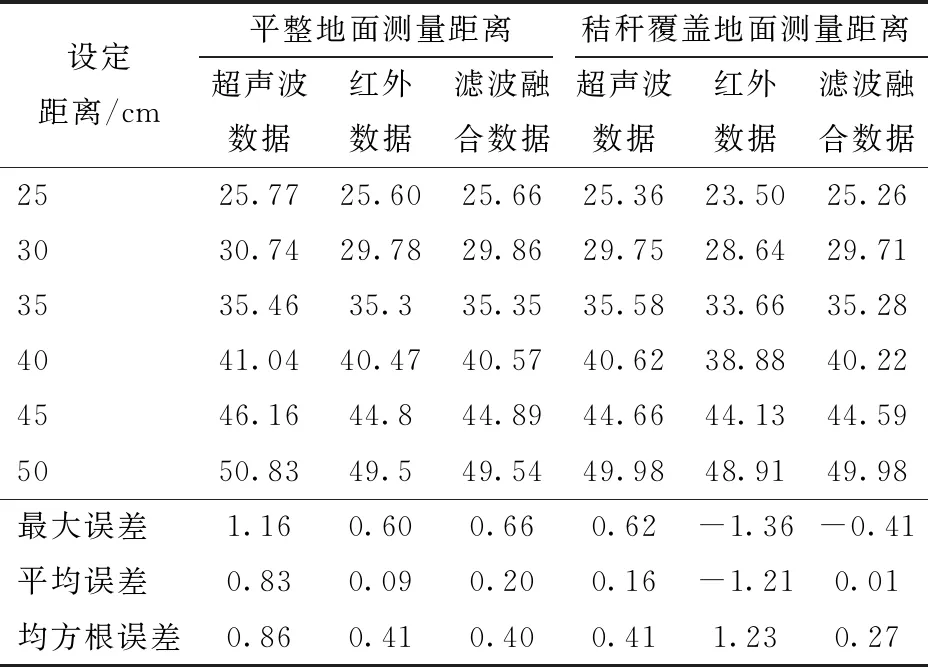
表2 耕深檢測裝置靜態標定試驗結果Tab.2 Experiment results of static calibration of tillage depth detecting device cm
在秸稈覆蓋地面,超聲波傳感器最大測量誤差為0.62 cm,平均誤差為0.16 cm,均方根誤差為0.41 cm。紅外傳感器最大測量誤差為-1.36 cm,平均誤差為-1.21 cm,均方根誤差為1.23 cm。由于覆蓋在地面的秸稈具有一定厚度,導致兩傳感器所測量的距離小于實際設定的距離,因此紅外傳感器測量數據均小于實際設定距離,而超聲波傳感器在測距時有額外的時延,彌補了秸稈覆蓋所帶來的測量偏差。此時兩傳感器濾波融合數據的最大測量誤差為-0.41 cm,平均誤差為0.01 cm,均方根誤差為0.27 cm,融合數據的精度優于紅外傳感器的測量精度,其測量值與超聲波傳感器測量值接近。
由于耕深檢測裝置各元件數據傳輸和環境影響,超聲波傳感器和紅外傳感器并不能在平整地面和秸稈覆蓋地面均保證良好的測量精度,而經卡爾曼濾波融合算法處理后的數據在兩種測量環境下均有較好的測量精度。
3.2 耕深檢測裝置動態工作性能試驗
為檢驗該耕深檢測裝置的動態工作性能,在吉林大學農機實驗室進行了動態測量試驗。超聲波傳感器和紅外傳感器安裝于深松機架下部(圖5),深松機具由土槽臺車牽引前進。試驗時機具前進速度為3.6 km/h,耕深分別設置為30、35、40、45 cm。在試驗研究耕深檢測裝置在平整地面的性能后,將地面均勻鋪上秸稈,在上述相同條件下進行耕深檢測裝置在秸稈覆蓋地面的性能試驗(圖6)。土槽臺車工作時在軌道上行駛,且采用電力驅動,因此行駛穩定、振動小,其牽引的深松鏟耕深十分穩定,試驗測量表明其實際耕深與設定耕深保持一致,因此用設定耕深作為實際耕深進行分析。

圖5 耕深檢測裝置平整地面性能試驗Fig.5 Performance experiment of tillage depth detecting device in leveling ground1.土槽臺車 2.深松機架 3.紅外傳感器 4.超聲波傳感器 5.深松鏟

圖6 耕深檢測裝置秸稈地面性能試驗Fig.6 Performance experiment of tillage depth detecting device in straw mulching ground1.深松機架 2.紅外傳感器 3.超聲波傳感器 4.深松鏟
圖7 平整地面耕深變化曲線Fig.7 Tillage depth variation curves in leveling ground
圖7為耕深檢測裝置在平整地面耕深變化曲線,由圖可知,超聲波傳感器和紅外傳感器的原始數據波動較大,經過濾波后的檢測數據較原始數據平滑,濾除了無用的雜波。在平整地檢測時,超聲波所檢測的傳感器至地面的距離h2大于實際距離,根據式(2)可知,濾波后超聲波檢測數據均小于實際耕深, 其在30、35、40、45 cm耕深處與實際耕深的最大偏差分別為-1.33、-1.37、-1.32、-1.34 cm;而濾波后的紅外傳感器測量數據在設定耕深附近波動,濾波后紅外傳感器檢測數據在30、35、40、45 cm耕深處與實際耕深的最大偏差分別為-0.33、0.27、-0.17、0.18 cm。融合后的檢測數據與濾波后紅外傳感器數據接近,在30、35、40、45 cm耕深處與實際耕深的最大偏差分別為-0.40、-0.24、-0.19、-0.20 cm;可知在平整地面檢測耕深時,超聲波檢測數據與實際耕深偏差較大,紅外傳感器檢測數據與實際耕深偏差較小,融合后的數據接近紅外數據,與設定耕深相差較小。
圖8是耕深檢測裝置在秸稈覆蓋地面的耕深變化曲線,在秸稈覆蓋地面超聲波濾波數據和實際數據較為接近,其在30、35、40、45 cm耕深處與實際耕深的最大偏差分別為0.28、-0.18、-0.20、0.24 cm;而紅外傳感器濾波數據均大于設定耕深,其在30、35、40、45 cm耕深處與實際耕深的最大偏差分別為1.66、1.62、1.59、1.63 cm。融合后的檢測數據與濾波后超聲波傳感器數據接近,其在30、35、40、45 cm耕深處與實際耕深的最大偏差分別為0.32、0.40、0.33、0.28 cm。
在秸稈覆蓋地面,超聲波檢測數據與實際耕深相差不大,紅外檢測數據大于設定耕深且偏差較大,融合后數據接近超聲波傳感器數據,與預定耕深相差不大。
耕深檢測裝置動態試驗表明,超聲波傳感器和紅外傳感器分別在秸稈覆蓋地面和平整地面有較好的性能,而數據融合算法能夠根據傳感器測量數據與設定耕深間的偏差進行數據融合,使融合后數據接近實際耕深。

圖8 秸稈覆蓋地面耕深變化曲線Fig.8 Tillage depth variation curves in straw mulching ground
4 田間試驗
在進行實際深松作業時,田間工作環境比實驗室土槽環境更為復雜多變。為了研究該耕深檢測裝置在田間的實際工作性能,在石家莊市藁城區進行了耕深檢測裝置的田間測試試驗(圖9)。
在田間作業時拖拉機行駛(圖9)穩定性不如土槽臺車,深松鏟實際耕深與設定耕深有一定偏差,因此試驗時采用人工每隔1 m測量實際耕深(圖10)。并計算深松深度變異系數V來判斷深松深度的穩定性,深松深度變異系數V計算式為[27]
(14)

Xi——第i個測量點的深松深度,cm
n——深松深度測量點數

圖9 耕深檢測裝置田間試驗Fig.9 Experiment of tillage depth detecting device in field1.耕深檢測裝置 2.拖拉機 3.紅外傳感器 4.超聲波傳感器 5.機架 6.深松鏟

圖10 人工測量耕深Fig.10 Detecting tillage depth manually
在設定耕深為30 cm和40 cm時,實際平均耕深為30.16 cm和40.28 cm,深松深度變異系數為1.79%和1.88%,可知實際深松深度有一定波動。由圖11可知,在田間工作過程中超聲波傳感器和紅外傳感器的檢測數據均有較大的波動和起伏,在設定耕深為30 cm和40 cm時,超聲波傳感器濾波數據的平均值為29.51 cm和38.79 cm,深松深度變異系數為2.51%和3.10%。

圖11 田間試驗耕深變化曲線Fig.11 Tillage depth-time curves in field
紅外傳感器測量數據的平均耕深為32.06 cm和41.52 cm,深松深度變異系數為2.41%和2.76%。因此,在實際作業情況下,超聲波傳感器和紅外傳感器測量只有部分數據與實際耕深接近,而整體波形變化與實際耕深有較大偏差,無法正確測量耕深和反映耕深變化趨勢。在設定耕深為30 cm和40 cm時,融合后平均測量耕深為30.06 cm和39.95 cm,深松深度變異系數為1.07%和1.00%,接近實際耕深,且融合后的數據能準確反映實際耕深變化趨勢。
5 結論
(1)采用超聲波傳感器和紅外傳感器綜合檢測耕深,并采用卡爾曼濾波融合算法將兩傳感器的數據進行融合,能夠充分利用兩傳感器在不同環境下的有效檢測數據,為實時、準確檢測耕深提供了一種新方法和新思路。
(2)在平整地面檢測耕深時,超聲波傳感器檢測值與實際耕深最大偏差為-1.37 cm,紅外傳感器檢測值與實際耕深最大偏差為-0.33 cm。在秸稈覆蓋地面檢測耕深時,超聲波傳感器檢測值與實際耕深最大偏差為0.28 cm,紅外傳感器檢測值與實際耕深最大偏差為1.66 cm。
(3)采用卡爾曼濾波融合的數據在平整地和秸稈覆蓋地面均有較高的檢測精度。當設定耕深為30 cm和40 cm時,融合后數據的平均測量耕深分別為30.06 cm和39.95 cm,深松深度變異系數分別為1.07%和1.00%,濾波融合數據能夠準確檢測耕深,并準確反映耕深的變化趨勢。
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
