焊接機器人在自動化專業實驗教學中的應用
2020-10-09 08:30:52黃玉水胡凌燕
實驗技術與管理 2020年1期
樂 健,黃玉水,張 華,胡凌燕
(南昌大學 信息工程學院,江西 南昌 330031)
目前,自動化專業課程教學理論性強,與生產實際聯系少,學生不了解相關課程的實際應用,學習的積極性、主動性不高。為了激發學生主動學習的積極性,需要研究面向新工科的交叉研究平臺的構建與有效運行[1]。許多教師在這方面進行了探索,如:對綜合性大學自動化專業機器人實踐教學體系的探索[2],將五軸工業機器人引入機械工程實驗教學[3],將機器人聲源定位系統融入實驗教學[4],對機器人技術實驗教學進行改革與實踐[5],對Android 手機控制球形機器人實驗進行設計[6],對結合機器人技術的嵌入式實踐教學進行探索[7],對基于機器人足球平臺的工程訓練進行研究等[8]。焊接機器人是一種實際應用很普遍的工業機器人,焊接機器人技術涉及機械、電子、傳感技術、智能控制算法和程序設計等課程知識。本文將研究自主移動焊接機器人在自動化專業實驗教學中的應用。
1 自主移動焊接機器人的機械部分
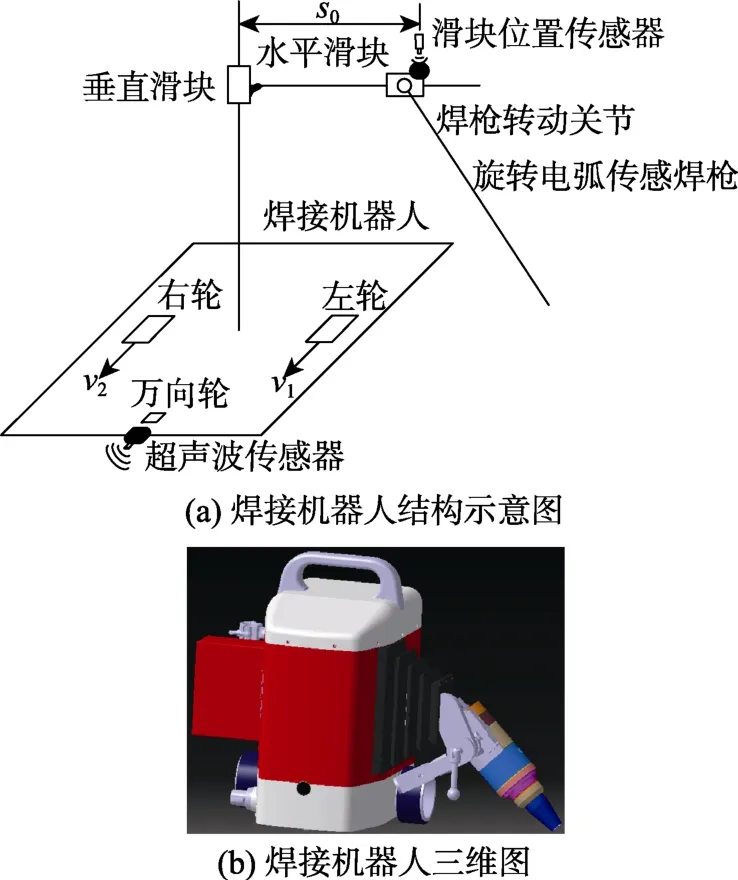
圖1 焊接機器人機械部分
圖1 為焊接機器人的機械部分,圖1(a)為焊接機器人的結構示意圖,主要包括輪式移動系統、十字滑塊系統、焊槍轉動關節、旋轉電弧傳感焊槍及機器人外殼等。學生需針對焊接任務,利用機械原理、機械設計等相關課程知識,對機器人的機械部分進行設計。還要利用二維機械制圖軟件 CAD 及三維機械制圖軟件 CATIA 分別繪制機器人的二維圖及三維圖,如圖1(b)所示。使學生將機械設計制造相關課程的理論知識融入實際工程應用中。
2 自主移動焊接機器人的硬件部分
如圖2 所示,焊接機器人系統的硬件部分主要包括焊縫跟蹤系統的硬件部分和焊接系統的硬件部分。焊縫跟蹤系統的硬件部分主要包括人機交互模塊、信號采集模塊、電弧轉速控制模塊和運動控制模塊。人機交互模塊通過單片機技術實現機器人工作狀態顯示及機器人工作模式的輸入;信號采集模塊利用數據采集卡采集多種傳感器的輸出信號,主要包括焊接電流、滑塊位置信號、超聲波信號,并將采集到的信號通過PC104 總線輸入到工業控制計算機中;電弧轉速控制模塊對電弧轉速進行閉環控制,并實現起弧、熄弧控制;運動控制模塊就是利用工業控制計算機對輸入信號及采集到的傳感信號進行處理,通過運動控制卡及電機驅動器,控制各電機協調運動。焊接系統的硬件部分主要包括焊接參數改變模塊及送絲速度調節模塊。通過自主移動焊接機器人硬件部分的實驗教學,能夠使學生了解單片機技術、電機運動控制技術、工業控制技術及電子線路 CAD 等課程的實際應用,從而加深對這些課程理論知識的理解。
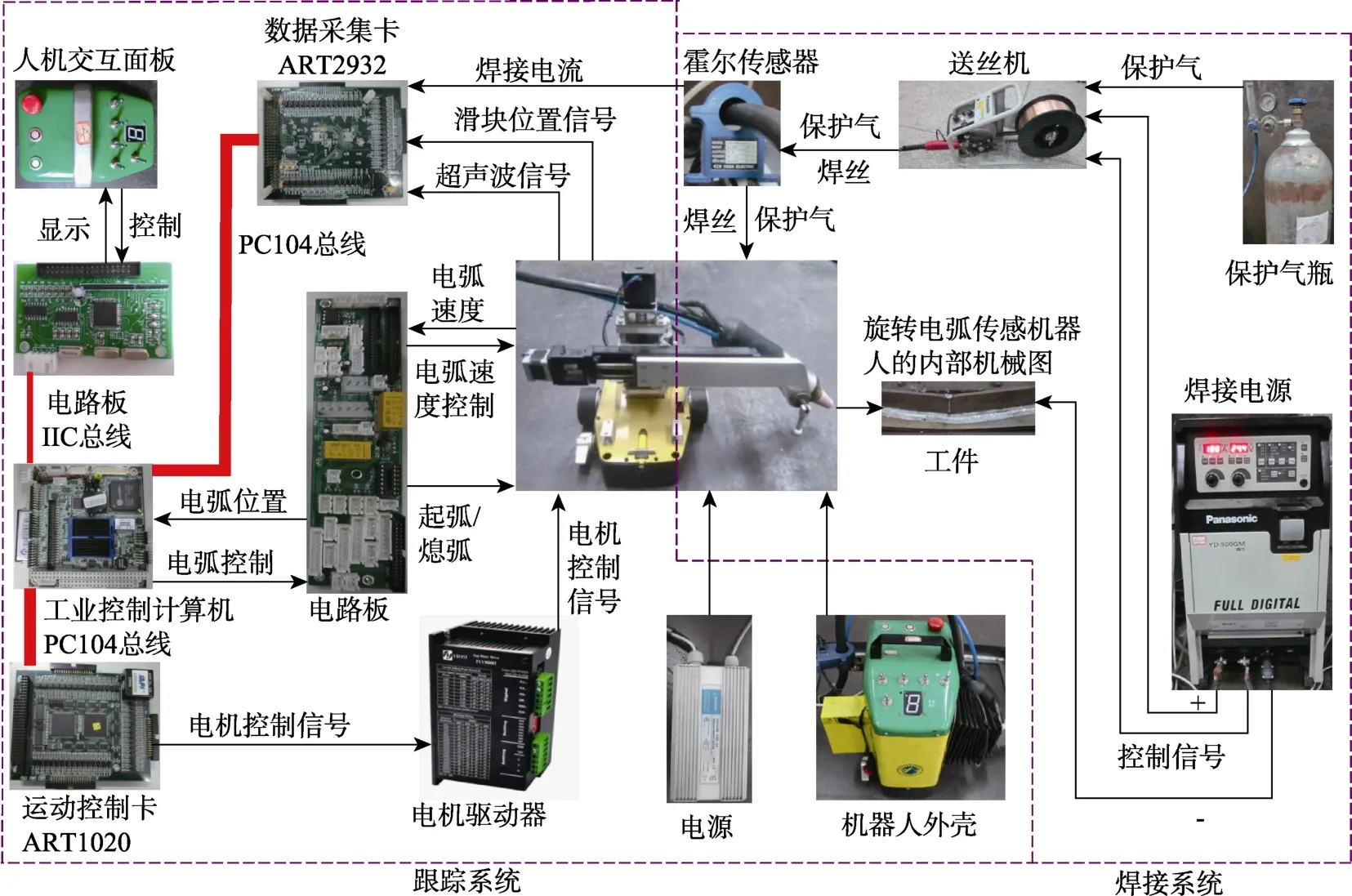
圖2 焊接機器人硬件部分
3 自主移動焊接機器人的傳感技術
自主移動焊接機器人需要利用多種傳感器采集反映機器人工作狀態的信號,這些傳感器包括霍爾電流傳感器、電弧轉速傳感器、旋轉電弧傳感器、超聲波傳感器和滑塊位置傳感器等。
3.1 霍爾電流傳感器
圖3 為霍爾電流傳感器實物圖及其工作原理示意圖。圖3(a)為霍爾電流傳感器實物圖,需要引出3 根線,分別是地線、+24 V 電源線及信號輸出線。圖3(b)為其工作原理示意圖,其中,d為霍爾器件的厚度,I為偏置電流,B為磁場強度,U為霍爾傳感器輸出的霍爾電壓。焊接纜線通過霍爾電流傳感器中的孔,并產生磁場,磁場強度大小與焊接電流大小成正比,將產生的磁場B垂直作用于霍爾傳感器中的霍爾器件上,根據霍爾效應,感應出霍爾電壓U,其值與通過纜線的焊接電流成正比,從而根據霍爾電壓U實現對焊接電流的測量。
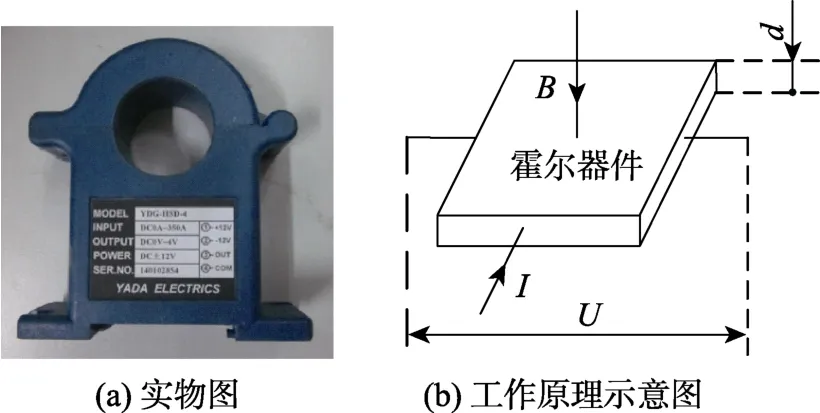
圖3 霍爾電流傳感器實物圖及其工作原理示意圖
3.2 電弧轉速傳感器
圖4 為電弧轉速傳感器實物圖及其工作原理示意圖。圖4(a)為電弧轉速傳感器實物圖,共有3 根引線,分別為地線、+5 V 電源線及輸出電壓U引出線。圖4(b)為電弧轉速傳感器工作原理示意圖,當轉子上的凹槽轉動至光發射器與光接收器的連線上時,光接收器可以接收到光發射器發射出的光,使光接收器導通,使輸出電壓U輸出低電平;當轉子上的凹槽未轉動至光發射器與光接收器的連線上時,光接收器沒有接收到光發射器發射出的光,光接收器未導通,使輸出電壓U輸出高電平。轉子每轉動一圈,輸出一次低電平,通過測量單位時間內傳感器輸出低電平的次數,實現對電弧轉速的測量,為電弧轉速的閉環控制提供反饋信號,實現對電弧轉速的閉環控制。
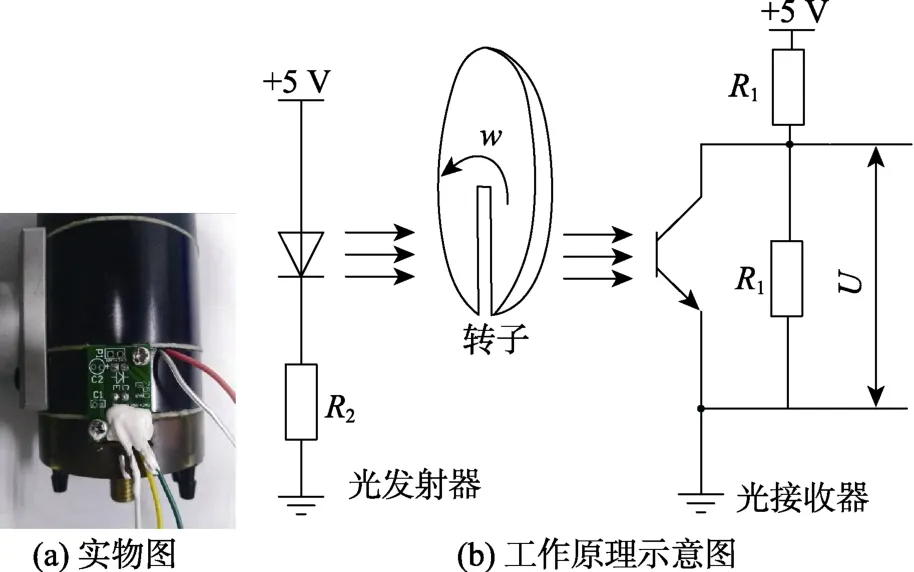
圖4 電弧轉速傳感器實物圖及其工作原理示意圖
3.3 旋轉電弧傳感器
圖5 為旋轉電弧傳感器實物圖及其工作原理示意圖。圖5(a)為實物圖,共有5 根引線,分別為用于給直流電機供電的+24 V 引線及地線、+5 V 引線、地線及電弧轉速信號輸出引線。
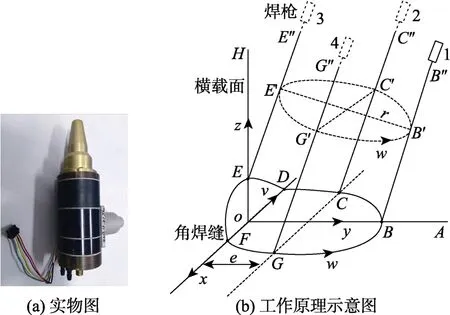
圖5 旋轉電弧傳感器實物圖及其工作原理示意圖
圖 5(b)為旋轉電弧傳感器工作原理示意圖[9-11],電弧從位置B逆時針轉動至位置C、位置D及位置E,使干伸長先變長,后變短,對應焊接電流先變小,后變大。同理,當電弧從位置E轉動至位置F,再至位置G、位置B時,干伸長先變長,后變短,使焊接電流先變小,后變大。通過分析曲線GBC對應的焊接電流之和與曲線CDEFG對應的焊接電流之和的關系,即可基于旋轉電弧傳感器實現對焊槍相對于角焊縫焊接偏差的識別。
3.4 超聲波傳感器
圖6 為超聲波傳感器的實物圖及其工作原理示意圖。圖6(a)為超聲波傳感器實物圖,共含有3 根引線,分別為+12 V 的電源線、地線及信號輸出線。圖6(b)為超聲波傳感器工作原理示意圖,超聲波傳感器輸出電壓的大小與傳感器前端離前方障礙物的距離成線性關系,通過建立輸出電壓與距離的數學模型[12],可實現對超聲波傳感器與前方障礙物距離的測量。
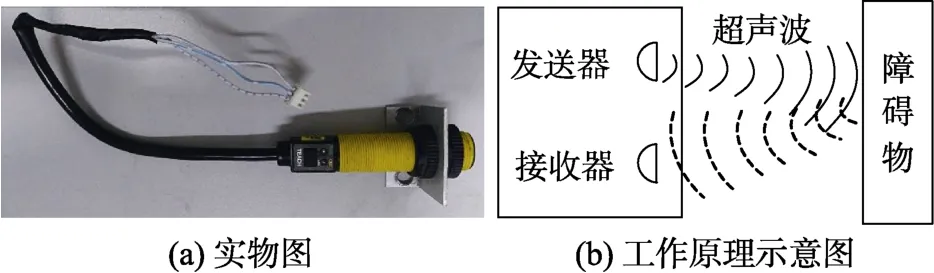
圖6 超聲波傳感器實物圖及其工作原理示意圖
3.5 滑塊位置傳感器
圖7 為滑塊位置傳感器實物圖及其工作原理示意圖。圖7(a)為滑塊位置傳感器實物圖,其有3 根引出線,分別為+5 V 的電源線、地線及信號輸出線。圖7(b)為滑塊位置傳感器工作原理示意圖,滑塊位置傳感器固定于機器人本體上,金屬反射片固定于水平滑塊或垂直滑塊上,并隨著滑塊運動而運動,當其運動至滑塊位置傳感器的正前方時,滑塊位置傳感器輸出信號端輸出高電平,否則輸出低電平,從而實現對滑塊位置的檢測。

圖7 滑塊位置傳感器實物圖及其工作原理示意圖
通過焊接機器人傳感系統的實驗教學,能夠使學生了解多種類型傳感器的用途、工作原理及使用方法。
4 程序設計
工具欄和菜單欄是對應的,其中,工具欄包括焊縫跟蹤、手動控制、參數設置、歷史記錄和系統測試等。可以通過左鍵單擊工具欄對應的圖標,實現對不同模塊的測試。如左鍵單擊焊縫跟蹤圖標后(見圖8),可選擇焊縫類型和焊絲類型,然后單擊開始按鈕;當需要停止焊接時,單擊停止按鈕。單擊打開按鈕后,彈出的窗口用于設置間斷焊的參數。
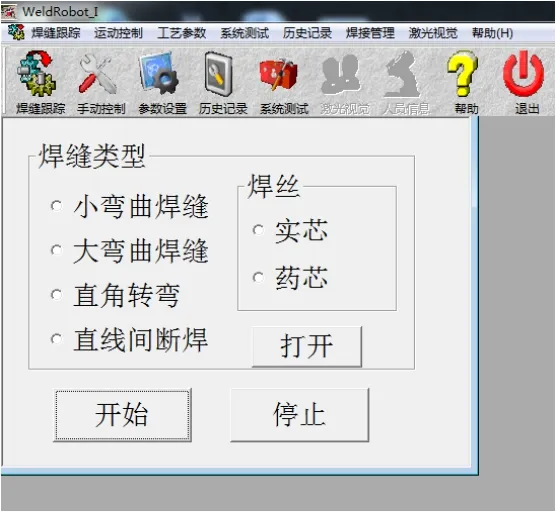
圖8 焊縫跟蹤焊接操作界面
圖9 為機器人跟蹤焊接直角焊縫程序流程圖。當機器人開始焊接時,基于多傳感器采集的信號,并通過濾波,識別出焊槍空間姿態的數學模型;利用偏差識別算法,識別出焊接偏差;采用智能控制技術,控制機器人各關節協調運動;基于輪子、水平滑塊和垂直滑塊的協調運動跟蹤焊接直角焊縫。使學生能夠利用MFC(microsoft foundation classes,微軟基礎類庫)編寫人機交互界面,使用C 語言和C++語言實現焊縫跟蹤控制算法。
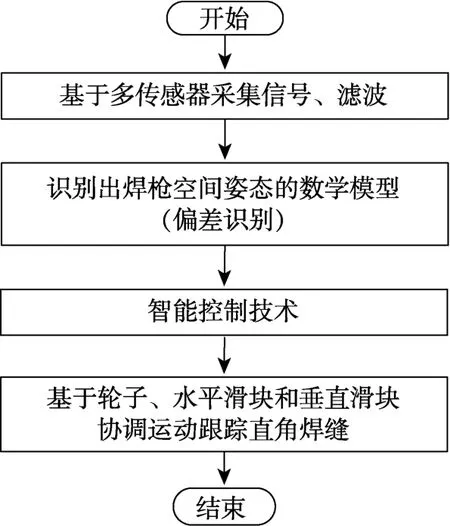
圖9 機器人跟蹤焊接直角焊縫程序流程圖
5 結語
本文研制的自主移動焊接機器人,為自動化專業實驗教學提供了新的設備,使學生能夠利用其進行與機械、電子、單片機、傳感技術和程序設計等自動化專業課程相關的綜合性實驗設計。
利用自主移動焊接機器人系統的機械部分、硬件部分、傳感技術及程序設計等,進行了彎曲直角焊縫的跟蹤焊接。使學生不但掌握了機器人相關的理論知識,并通過實際應用發現問題、改進理論,達到產學研相結合的目的,提高了學生的綜合素質。
通過將生產、學習和研究過程相結合,使學習來源于生產,并最終服務于生產,有利于實現“卓越工程師教育培養計劃”,提高學生的理論知識水平及工程實踐能力。
猜你喜歡
建材發展導向(2021年6期)2021-06-09 05:57:08
數學小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
甘肅教育(2020年4期)2020-09-11 07:42:36
物理之友(2020年12期)2020-07-16 05:39:20
甘肅教育(2020年8期)2020-06-11 06:10:04
金屬加工(熱加工)(2020年12期)2020-02-06 05:59:00
當代貴州(2019年41期)2019-12-13 09:28:56
制造業自動化(2017年2期)2017-03-20 14:26:13
中國教育技術裝備(2016年11期)2016-12-01 06:53:03
中國共青團(2015年7期)2015-12-17 01:24:38