垂直起降運載器展開鎖定機構設計與仿真分析
2020-09-03 08:15:52聶獻東
機械設計與制造工程 2020年8期
關鍵詞:模型
聶獻東,楊 赧,聶 宏,張 明
(1.南京航空航天大學飛行器先進設計技術國防重點科學實驗室,江蘇 南京 210016)
(2.上海宇航系統(tǒng)工程研究所,上海 201100)
航天技術是一個國家綜合國力的重要體現(xiàn),而運載技術是其最基本的組成部分。運載火箭是人類進入太空的最重要手段,一直受到世界各國的關注[1]。在人類進行航天和空間探索的過程中,航天運輸?shù)闹饕侄问且淮涡允褂眠\載火箭(expendable launch vehicle,ELV)。ELV主要有以下3個缺點:發(fā)射費用昂貴;殘骸著陸點分布范圍廣;生產(chǎn)和測試周期長,難以滿足發(fā)射需求。ELV限制了航天工業(yè)的快速發(fā)展,因此可重復使用運載火箭(reusable launch vehicle,RLV)逐漸受到航天領域的關注[2-3]。
第一代可重復使用運載器,即航天飛機,未能實現(xiàn)系統(tǒng)設計之初預期的大幅降低發(fā)射和運營成本的目標。歐美等國的政府機構提出了針對第二代可重復使用運載器的設計方案[4]。其中,對RLV項目進行了重點研究。根據(jù)回收方式,RLV主要分為3種類型:傘降回收、帶翼飛回和垂直起降(vertical takeoff and vertical landing,VTVL)。傘降回收著陸技術的可靠性高、技術成熟度較高,但落點精度較低。如果采用帶翼飛回的回收方式,則需要對主流的非升力體形式的火箭進行重大修改,這將直接影響其上升段飛行特性。VTVL的回收方式在不顯著改變現(xiàn)有火箭結構的情況下,為火箭回收提供了有效的技術支持,且其回收方式僅需較小面積的場坪[5]。
垂直起降運載器著陸裝置的3種典型結構形式是伸縮式、連桿式和外翻式。伸縮式的特點是質量輕,結構簡單,展開半徑小,著陸穩(wěn)定性較差,需要箭體下部有一定的傾斜角度,不適合圓柱形箭體。連桿式展開半徑大、著陸穩(wěn)定性好,但其結構復雜、質量大等劣勢會影響運載火箭整體的運載能力。外翻式可很好地適應圓柱形箭體,著陸穩(wěn)定性高,可承受過載大,機構自由度大,且不受箭體內部空間的限制,可用于著陸質量較大的運載器。
國外垂直起降運載器的典型代表是美國Space-X公司研制的獵鷹系列運載器。獵鷹九號驗證機成功進行了一子級海上濺落試驗和陸地回收試驗。重型獵鷹火箭使用的兩個助推器幾乎同時實現(xiàn)陸地著陸回收,但其芯級在海上回收失敗。獵鷹九號火箭多次實現(xiàn)成功回收,其主著陸腿由伸縮式的多級展開支柱和緩沖器組成。
中國商業(yè)航天公司翎客航天對垂直起降可重復使用運載器進行了研究。RLV-T1垂直起降飛行器實現(xiàn)了首次懸停飛行,RLV-T2具有更高的結構效率及可收縮著陸腿,RLV-T3可進行頻繁起降的飛行試驗。上海航天技術研究院和中國運載火箭技術研究院也各自提出了可重復使用運載器的方案,分別在長征六號和長征八號運載火箭上進行技術驗證。
本文設計了返回著陸系統(tǒng)總體布局,對展開鎖定機構進行了結構設計,說明了機構工作過程。對展開鎖定機構進行機械結構建模和氣壓驅動建模,實現(xiàn)氣動-機械聯(lián)合仿真,并討論支柱的展開特性。
1 展開鎖定機構結構設計
著陸機構采用外翻式著陸支腿設計。在運載器發(fā)射階段著陸腿緊貼箭體表面并與箭體鎖定;在返回階段通過氣壓驅動使著陸腿展開并鎖定,進入著陸工作狀態(tài)。
1.1 返回著陸系統(tǒng)總體布局
為便于著陸時的載荷傳遞,著陸腿均布于箭體四周的4根大梁處,數(shù)量為4。著陸機構收起狀態(tài)和展開狀態(tài)如圖1所示。

1—箭體;2—整流罩;3—上耳片;4—驅動作動筒;5—下耳片;6—輔助支柱;7—鎖定裝置;8—外殼;9—足墊;10—緩沖器;11—第三級套筒;12—第二級套筒;13—第一級套筒;14—端蓋
主支柱包括收放支柱(即展開鎖定機構)和緩沖器,展開鎖定機構包含端蓋和三級相互嵌套的同心套筒,各級套筒可在氣動力作用下伸縮,到達指定位置時通過各級套筒間的內鎖鎖定,也可反向解鎖。緩沖器能夠承受箭體著陸時的地面載荷。輔助支柱位于外殼內,對運載器著陸起輔助支撐作用,可承受著陸時的部分載荷。足墊與地面接觸,直接承受著陸沖擊載荷。外殼主要用于包裹主支柱和輔助支柱,使其免受熱流燒蝕。上耳片與主支柱的端蓋連接,下耳片與輔助支柱連接,上下耳片都固定于箭體承力梁。鎖定裝置位于外殼和箭體上,可在著陸機構處于收起狀態(tài)時,將外殼和箭體鎖定,保證著陸腿不會意外展開。驅動作動筒可在主支柱展開時提供動力幫助其通過死點。死點位置為主支柱展開過程中長度最短的位置,此時主支柱并非緊貼箭體,而是與箭體成一定角度。因運載器要求有較高展開速度,故采用氣壓驅動。
1.2 收放支柱結構設計
收放機構主要由三級同心套筒和端蓋組成,其中第二、三級套筒可軸向運動。第二、三級套筒端部有排氣孔,且各連接一個鋼球鎖機構,不同級間有密封裝置。圖2和圖3分別為端蓋和第一級套筒結構圖。第二、三級套筒結構和第一級套筒類似。

圖2 端蓋

圖3 第一級套筒
鎖定裝置是展開鎖定機構的重要組成部分。本文使用鋼球鎖作為展開鎖定機構的內鎖。展開鎖定機構有兩處鋼球鎖裝置。圖4為機構的鋼球鎖結構剖面圖。

圖4 鋼球鎖結構剖面圖
展開鎖定機構包含高壓腔、環(huán)形背壓腔1、環(huán)形背壓腔2這3個可變氣體腔室和1個不變氣體腔室排氣腔,如圖5所示。

圖5 展開鎖定機構剖面圖
鋼球鎖上鎖過程是:高壓氣體從端蓋上側進氣口進入高壓腔,其氣壓力作用在第二、三級套筒端部鋼球鎖端面,第二、三級套筒一起向右運動,環(huán)形背壓腔1內的氣體經(jīng)過鋼球鎖進入排氣腔,流經(jīng)氣管,最終從端蓋下側的排氣口排出。當?shù)诙壧淄策\動到端部鎖槽位置時,其通過鋼球鎖與第一級套筒鎖定形成整體。隨后第三級套筒在氣動力作用下伸出,當?shù)谌壧淄策\動到端部鎖槽位置時,其通過鋼球鎖與第二級套筒鎖定形成整體。圖6為展開鎖定機構全展開狀態(tài)。

圖6 展開鎖定機構全展開狀態(tài)
2 著陸系統(tǒng)展開動力學建模
著陸支腿的展開過程是:首先外殼解鎖,外殼被驅動作動筒推動通過死點位置,然后氣壓驅動著陸腿繼續(xù)展開到位。針對著陸腿展開過程進行仿真分析,模擬其展開過程。在ADAMS軟件中建立著陸機構的機械結構模型,在AMESim軟件中建立氣壓驅動模型,通過AMESim提供的接口模塊進行氣動-機械聯(lián)合仿真。
支腿氣壓-機械系統(tǒng)模型主要包括兩部分:氣壓驅動模型和機械結構模型。前者用于計算作用在展開鎖定機構內的實時氣壓力,后者用于計算展開過程中各級套筒的位移、速率等,計算結果實時交互。
2.1 建立氣壓驅動模型
著陸支腿的氣壓驅動模型包括展開鎖定機構模型和氣壓驅動回路模型兩部分。展開鎖定機構模型可模擬展開鎖定機構內部的氣體腔室和流動結構,氣壓驅動回路模型可模擬展開鎖定機構外部的控制回路。
根據(jù)氣流在機構內的流動路徑、摩擦力、套筒直徑、套筒行程等參數(shù),在AMESim中建立展開鎖定機構氣動模型,如圖7所示。

圖7 展開鎖定機構氣動模型
展開鎖定機構可以看作由第一、二級套筒和第二、三級套筒組成的氣缸模型構成。第一、二級套筒組成的氣缸的高壓腔對應于展開鎖定機構的高壓腔,背壓腔對應于機構的環(huán)形背壓腔1;第二、三級套筒組成的氣缸的高壓腔對應于機構的高壓腔,背壓腔對應于機構的環(huán)形背壓腔2;固定體積的氣室模擬排氣腔;節(jié)流孔模擬進、排氣口;摩擦力模型模擬級間摩擦力。
建立好展開鎖定機構的氣動模型后,還需建立氣壓驅動回路模型,包括高壓氣瓶、減壓閥、展開鎖定機構等通過AMESim的接口模塊,創(chuàng)建與機械結構模型連接的接口,實現(xiàn)氣壓系統(tǒng)與機械結構的聯(lián)合仿真。在建立接口時,需要定義AMESim模型的輸出、輸入,輸出是作用于第二、三級套筒上的氣動力,輸入是機械結構模型反饋給氣壓系統(tǒng)的第二、三級套筒位移和速率。AMESim接口模塊如圖8所示。

圖8 AMESim的接口模塊
最后需在AMESim中設置各套筒直徑、0位移腔室長度、摩擦力參數(shù)、排氣腔體積等參數(shù)。同時還需設置氣瓶壓力、體積和減壓閥出口壓力。
2.2 建立機械結構模型
采用外部文件導入的方法,首先對模型進行簡化處理:將所有零部件視為剛體,各零部件間的連接簡化為剛性連接,略去機構中螺栓、O形圈等標準件;然后定義材料屬性、部件間運動副和筒內氣壓力等;最后設置聯(lián)合仿真數(shù)據(jù)傳輸方式。著陸支腿機械結構模型如圖9所示。

圖9 著陸支腿機械結構模型
3 著陸系統(tǒng)展開運動聯(lián)合仿真
3.1 不考慮氣動阻力的展開運動仿真
1)死點位置前。
著陸腿從緊貼箭體外壁到死點位置受重力和摩擦力作用,不受氣壓力作用。在ADAMS模型中施加重力,氣壓系統(tǒng)模型中減壓閥出口壓力取大氣壓,模擬不充氣的情況。展開角度曲線如圖10所示,各腿曲線相同。

圖10 無氣動阻力死點位置前的展開角度
展開角度為17°,展開時間為0.9 s。
2)死點位置后。
著陸腿從死點位置到完全展開受氣壓力作用。AMESim模型參數(shù):進排氣口面積為40 mm2,內部節(jié)流孔面積為450 mm2,氣瓶體積為24 L,初始壓力為2 MPa,減壓閥出口壓力為0.3 MPa。仿真結果如下。
①展開角度。
圖11為展開鎖定機構展開角度曲線。

圖11 無氣動阻力死點位置后的展開角度
展開角度為119°,總展開角度為136°。
②展開鎖定機構行程。
圖12為第二、三級套筒行程曲線。

圖12 無氣動阻力死點位置后的套筒行程
展開時間為2.2 s,第二級套筒行程為0.838 m,第三級套筒行程為1.687 m。放下過程中第二、三級套筒先是一起伸出,第二級套筒到位后第三級套筒再伸出直至最終狀態(tài)。四腿展開同步性較好。
3.2 考慮氣動阻力的展開運動仿真
1)死點位置前。
箭體有20 m/s的下落速度。在ADAMS模型中添加下落速度對應的氣動阻力,氣壓系統(tǒng)模型中減壓閥出口壓力取大氣壓,模擬不充氣的情況,發(fā)現(xiàn)僅靠重力支柱無法從初始位置展開至死點位置。于是在模型中添加一氣動力矩以模擬驅動作動筒對外殼的推動力,得到展開角度曲線如圖13所示。
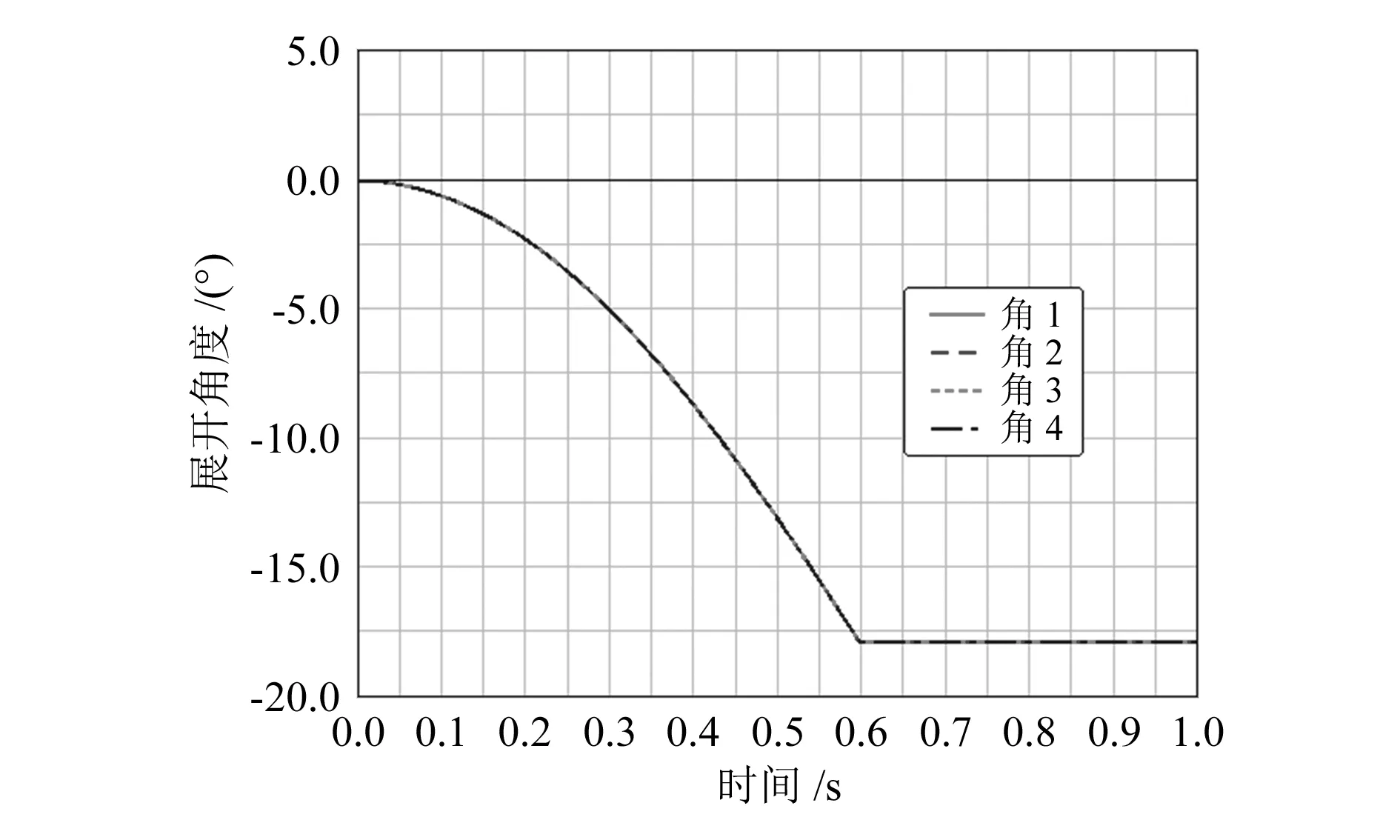
圖13 有氣動阻力死點位置前的展開角度
展開角度為17°,展開時間為0.6 s。
2)死點位置后。
在ADAMS模型中添加氣動阻力。支腿死點后的展開受氣壓力作用。AMESim模型參數(shù)同無氣動阻力死點位置后的參數(shù),仿真發(fā)現(xiàn)不能在5 s內順利展開,于是增大減壓閥出口壓力至1 MPa,圖14為展開鎖定機構展開角度曲線。

圖14 有氣動阻力死點位置后的展開角度
展開角度為119°,總展開角度為136°,展開時間為2.8 s,四腿展開同步性較好。
3.3 死點位置后箭體下落速度的影響
AMESim模型參數(shù):進排氣口面積為40 mm2,內部節(jié)流孔面積為450 mm2,氣瓶體積為24 L,初始壓力為5 MPa,減壓閥出口壓力為2 MPa。箭體下落速度為40 m/s,在ADAMS模型中設置對應的氣動阻力。得到第二、三級套筒行程如圖15所示。

圖15 死點位置后箭體40 m/s下落時的套筒行程
箭體下落速度為40 m/s時無法正常展開。箭體下落速度過大無法正常展開。
3.4 考慮箭體過載情況下的展開運動
1)死點位置前。
在ADAMS中加下落速度20 m/s對應的氣動阻力,對箭體施加方向向上大小1g的過載。氣壓系統(tǒng)中減壓閥出口壓力取大氣壓,模擬不充氣。展開角度如圖16所示。

圖16 有箭體過載死點位置前的展開角度
展開角度為17°,展開時間為0.4 s。無驅動作動筒的驅動力作用也能展開,因為箭體所受過載對支柱展開起積極作用。
2)死點位置后。
在ADAMS模型中添加20 m/s下落速度對應的氣動阻力,對箭體施加方向向上的大小1g的過載。氣壓系統(tǒng)模型中減壓閥出口壓力取大氣壓,模擬不充氣。得到第二、三級套筒行程如圖17所示。

圖17 有箭體過載死點位置后的套筒行程
展開時間為1.6 s,不用氣壓驅動也能展開,箭體所受過載對支柱展開起積極作用。
3.5 箭體傾斜角對展開同步性的影響
上述所有仿真箭體均無傾斜角,本節(jié)討論箭體在支柱對稱面內偏轉5°情況下的展開運動。
在ADAMS中修改重力方向,使其由鉛垂向下變?yōu)樵谥е鶎ΨQ面內偏轉5°向下,修改ADAMS中的氣動阻力。
AMESim模型參數(shù):進排氣口面積為40 mm2,內部節(jié)流孔面積為450 mm2,氣瓶體積為24 L,初始壓力為2 MPa,減壓閥出口壓力為1 MPa。無箭體過載。得到展開角度和套筒行程如圖18和圖19所示。

圖18 死點位置后傾斜條件下的展開角度
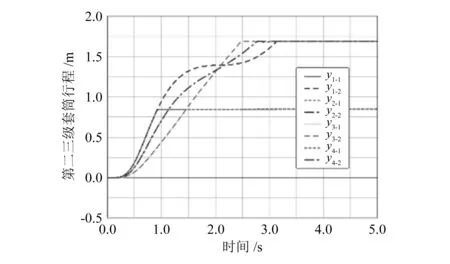
圖19 死點位置后傾斜條件下的套筒行程
各支腿展開時間分別為2.5 s、2.8 s、2.8 s、3.1 s。展開時間為3.1 s的支柱因為受氣動阻力最大所以展開最慢,展開時間為2.5 s的支柱因為受氣動阻力最小所以展開最快,展開時間為2.8 s的支柱因為受氣動阻力相等所以展開時間相等。此條件下箭體傾斜角對展開同步性有影響。
4 結論
本文根據(jù)運載器返回著陸系統(tǒng)的總體參數(shù),設計了著陸系統(tǒng)的總體布局形式,針對系統(tǒng)中的展開鎖定機構進行了結構設計,說明了其工作過程。對展開系統(tǒng)進行機械結構、氣壓驅動建模和氣動-機械聯(lián)合仿真。結論如下:
1)著陸機構采用外翻式著陸支腿設計,4條著陸腿均布于箭體四周,其可繞下耳片轉動以完成著陸機構的收放。
2)收放機構結構簡單、質量輕,能夠承受著陸載荷;鎖定機構可方便地上鎖、解鎖且本身結構相對簡單,可靠性高。
3)無氣動阻力下,過死點前,不加氣動阻力和氣壓系統(tǒng),得死點角度為17°,展開時間為0.9 s;過死點后,不加氣動阻力,加氣壓系統(tǒng),AMESim中的減壓閥出口壓力為0.3 MPa,得展開角度為119°,展開時間為2.2 s。總展開角度為136°,總展開時間為3.1 s。
4)有氣動阻力下,過死點前,加氣動阻力,不加氣壓系統(tǒng),無法正常展開,施加驅動作動筒驅動力后,得死點角度為17°,展開時間為0.6 s;過死點后,加氣動阻力,加氣壓系統(tǒng),AMESim中的減壓閥出口壓力取1 MPa,得展開角度為119°,展開時間為2.8 s。總展開角度為136°,總展開時間為3.4 s。
5)箭體下落速度越大,展開時間越長,下落速度過大會無法正常展開。
6)箭體受方向向上大小1g的過載且外殼受氣動阻力時,不用驅動作動筒的驅動力也能完成死點前的展開運動,不用氣壓驅動也能完成死點后的展開運動。
7)箭體傾斜5°時,各支腿展開不同步,因為氣動阻力與箭體傾斜角有關。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
