基于多AGV協(xié)同搬運的分布式PID隊形控制與保持策略
2020-09-03 09:16:24潘天宇樓航飛劉耀強(qiáng)
機(jī)械設(shè)計與制造工程 2020年8期
關(guān)鍵詞:系統(tǒng)
潘天宇,樓航飛,劉耀強(qiáng)
(1.中國電子科技集團(tuán)第二十八研究所,江蘇 南京 210016)
(2.中興通訊股份有限公司,江蘇 南京 210016)
隨著單臺自動導(dǎo)引運輸車(automated guided vehicle, AGV)在物流運輸中的應(yīng)用日益廣泛,多AGV協(xié)同搬運在工業(yè)生產(chǎn)中的需求也逐漸顯現(xiàn)。多AGV系統(tǒng)的自由組合不再被輸送部件的形狀、種類、質(zhì)量限制,從而進(jìn)一步提高了AGV單體小車的利用率。目前中國電子科技集團(tuán)第二十八研究所正在不斷拓展軍民用機(jī)動式裝備、特種車輛及方艙等系統(tǒng)裝備在搬運和運輸領(lǐng)域的應(yīng)用范圍,逐步探索多AGV協(xié)同應(yīng)用場景與大型物料搬運與制造的有效結(jié)合。
如何形成特定的協(xié)同隊形以及運動過程中的隊形保持與控制是多AGV協(xié)同搬運首先要考慮的問題。從以往關(guān)于隊形的文獻(xiàn)中可以總結(jié)出以下的控制策略。基于行為方式的編隊控制[1]:首先將機(jī)器人的整個運動分解為不同的子行為,在子行為設(shè)計中引入階梯控制取法,給予每個成員一定的響應(yīng)權(quán)重和相應(yīng)的響應(yīng)行為,從而提高隊形控制的容錯率。這種方式的適用范圍較小,很多情況下難以抽象出具體的數(shù)學(xué)模型。基于“長機(jī)-僚機(jī)”方式(也可稱為“Leader-Follower”“領(lǐng)航者-跟隨者”“主從”等方式)的編隊控制[2-4]:長機(jī)負(fù)責(zé)隊形的成形與運行路線的軌跡跟蹤,而從機(jī)通過對長機(jī)的航向速度、航向角和高度跟蹤從而實現(xiàn)自我調(diào)整的效果,達(dá)到保持編隊隊形的目的。這種方式應(yīng)用范圍較廣,簡單易于實現(xiàn),且結(jié)構(gòu)穩(wěn)定可靠,但是只考慮到了隊形保持問題,卻忽略了環(huán)境的約束以及突發(fā)事件的避障。虛擬結(jié)構(gòu)隊形控制:文獻(xiàn)[5]、[6]根據(jù)目標(biāo)協(xié)同隊形和任務(wù)過程中的已知航路數(shù)據(jù)點位置規(guī)劃得到期望的虛擬隊形和路線,從而設(shè)計非線性航路跟隨制導(dǎo)率參數(shù)值,基于李雅普諾夫理論設(shè)計隊形誤差控制器,用來補(bǔ)償航跡切向隊形誤差,最后綜合制導(dǎo)率和控制器得到協(xié)同控制的運動指令。人工勢場法[7-8]:首先采用基于動態(tài)網(wǎng)絡(luò)拓?fù)涞木庩牱椒ǎ瑢⒆灾魇剿聶C(jī)器人(autonomous underwater vehicle,AUV)看作網(wǎng)絡(luò)的節(jié)點,對于同時存在的目標(biāo)和障礙區(qū)域建立勢場函數(shù),使AUV完成在線規(guī)劃與集群避障。
在實際的應(yīng)用中,通常將其中的兩種或者多種控制方法結(jié)合使用,從而有效提升運行過程中隊形保持的效果。羅欽瀚等[9]在復(fù)雜空間環(huán)境背景下將三維地理信息轉(zhuǎn)換為二維坐標(biāo)圖,通過機(jī)器學(xué)習(xí)算法改進(jìn)A*算法尋找到協(xié)同最優(yōu)路徑;文獻(xiàn)[10]提出了基于虛擬結(jié)構(gòu)法和“Leader-follower”法的協(xié)同控制策略,前者將整個協(xié)同AGV協(xié)同系統(tǒng)退化為一個剛體,設(shè)計協(xié)同運動控制算法,后者通過主-從原理將AGV的隊形控制問題轉(zhuǎn)化為從車跟蹤主車的位置和方向問題,再分解到每個AGV單元得到各自的運動控制量;而文獻(xiàn)[11]則在以往的主-從隊形控制算法中添加模糊控制器進(jìn)行智能調(diào)節(jié),將多機(jī)器魚系統(tǒng)的隊形控制問題轉(zhuǎn)化為具有反饋調(diào)節(jié)的跟蹤問題,當(dāng)從動系統(tǒng)(Follower)存在位置偏差時,通過實時的位置變化從而實現(xiàn)對速度的調(diào)整。
綜上可知,協(xié)同隊形控制算法大多應(yīng)用在飛行器與AUV的隊形設(shè)計上,而應(yīng)用在多AGV協(xié)同搬運的場景較少,尤其是多AGV小車以結(jié)構(gòu)化的隊形共同協(xié)作完成大型物件的運輸任務(wù)。本文針對多AGV協(xié)同搬運中的隊形控制和保持問題,設(shè)計多AGV協(xié)同搬運系統(tǒng)分布式PID(proportion-intergration-differentiation)隊形控制器,在協(xié)同隊形中的各AGV的物理狀態(tài)最終趨于一致的條件下,基于圖論和矩陣論理論的知識,得到多AGV協(xié)同系統(tǒng)一致性協(xié)議式。
1 多AGV協(xié)同搬運隊形一致性協(xié)議式
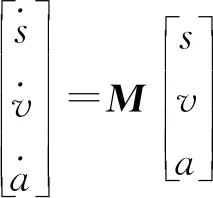
在AGV運動過程中,各AGV的狀態(tài)量之間的關(guān)系可以表示為:
(1)
式中:si(t),vi(t),ai(t)分別為AGV的位移量、速度量和加速度量;ui(t)為作用于AGV的控制輸入量。在隊形保持一致的過程中,最終目的就是在運動控制算法下的各AGV的位移、速度和加速度最后趨向一致,即表現(xiàn)形式為limt→∞|si(t)-sj(t)|= 0,limt→∞|vi(t)-vj(t)|=0,limt→∞|ai(t)-aj(t)|=0,其中i,j為鄰居關(guān)系。
模型假定:存在一個由N臺AGV組成的協(xié)同搬運系統(tǒng)。其中復(fù)數(shù)s1,s2,…,sn表示各AGV的位移狀態(tài);v1,v2,…,vn表示各AGV的速度;a1,a2,…,an表示各AGV的加速度。則可以推演出協(xié)同系統(tǒng)下的一致性協(xié)議[12]:
km((vj(t)-vi(t))+kn((aj(t)-ai(t))]
(2)
式中:ai(t),vi(t),si(t)分別為AGVi在t時刻的加速度、速度與位移信息;aj(t),vj(t),sj(t)分別為AGVj在t時刻的加速度、速度與位移信息;wij為一個隨著i,j取值不同而不同的系數(shù);ui(t)為控制輸入;kl,km,kn為需要求解的控制參數(shù)。則一致性協(xié)議用矩陣的方式表達(dá)為:
(3)
假定n個多AGV協(xié)同系統(tǒng)中的個體模型G(s)為:
(4)
式中:s為拉普拉斯變換中的復(fù)參變量。
參考文獻(xiàn)[13]對式(2)進(jìn)行拉普拉斯變換得到:
(5)
式中:U(s)為關(guān)于s的拉氏函數(shù);zi,zj為在復(fù)頻域下的AGV物理狀態(tài)。
通過上述研究可知,使用一致性協(xié)議轉(zhuǎn)換以及拉普拉斯變換,能夠?qū)⒍郃GV協(xié)同的一致性問題轉(zhuǎn)化為分布式控制器的設(shè)計求解問題,即求解控制參數(shù)的穩(wěn)定域。
2 多AGV協(xié)同搬運系統(tǒng)分布式PID隊形保持器設(shè)計
2.1 復(fù)常系數(shù)線性方程的穩(wěn)定性判據(jù)
常見的復(fù)常系數(shù)線性系統(tǒng)方程為:

(6)
式中:y為自變量;t為時間;aj、bj為常實數(shù),j=1,2,…,n;i為虛數(shù)單位。則對應(yīng)的特征方程為:
P(λ)=λn+(a1+ib1)λn-1+…+(an+ibn)=0
(7)
式中:P(λ)為關(guān)于λ的特征多項式;λn為關(guān)于λ的n階變量。
對于特征多項式P(λ),整理可得:
Q(λ)=a1λn-1+ib2λn-2+a3λn-3+ib4λn-4+…+q
(8)
式中:q為常數(shù)項。
文獻(xiàn)[14]通過對特征方程式(7)的系數(shù)進(jìn)行實數(shù)算數(shù)四則運算的遞推公式,給出了復(fù)常系數(shù)線性系統(tǒng)的穩(wěn)定性判據(jù),系統(tǒng)內(nèi)部參數(shù)ai和bi的數(shù)值的不同變化將直接影響系統(tǒng)的穩(wěn)定性。
由文獻(xiàn)[15]中的定理可得復(fù)常系數(shù)多項式特征方程P(λ)的根分布在復(fù)平面左半平面(Reλ<0)的充分必要條件:
(9)
式中:Ci都是正實數(shù),Ki都是實數(shù),i=1,2,3,…,n。
對式(6)和式(8)的系數(shù)進(jìn)行變量定義,令:
(10)
根據(jù)文獻(xiàn)[16]可以得到遞推公式為:
(11)
其中:
(12)
式中:ai,j,bi,j為式(8)變量λ多項式的實部和虛部;Ti為關(guān)于ai-2,1和ai-1,1的變量;Vi為關(guān)于bi,j的變量。
系統(tǒng)(式(6))漸近穩(wěn)定的充分必要條件是式(11)和式(12)成立,且Ti>0(i=1,2,…,n),即Ti均大于0。該判據(jù)同樣是充分必要條件,反之若想得到系統(tǒng)不穩(wěn)定的結(jié)論時,只需要判定存在Ti≤0即可。
2.2 多AGV協(xié)同搬運系統(tǒng)分布式PID隊形保持器設(shè)計
AGV協(xié)同搬運系統(tǒng)的動力學(xué)模型為:
(13)
其中:i,j=1,2,3…,n;L=kl(sj(t)-si(t));M=km(vj(t)-vi(t));N=kn(aj(t)-ai(t))。
令
U(t)=[S(t)T,V(t)T,A(t)T]T
其中:
S(t)=[s1,s2,…,sn]T
V(t)=[v1,v2,…,vn]T
A(t)=[a1,a2,…,an]T
整理式(13)可以得到:
(14)
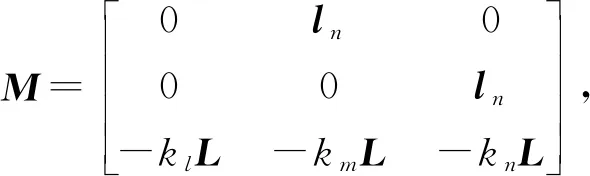
式中:In為單位矩陣;W為三階系統(tǒng)網(wǎng)絡(luò)拓?fù)鋵?yīng)的鄰接矩陣。簡化式(14)可得:

(15)
則式(15)的特征方程為:
det(sI3n-M)=0
(16)
式中:det為矩陣的行列式;I3n為三階單位矩陣。
將矩陣M代入式(16)可得:
(17)
對式(17)進(jìn)一步化簡求解可得:
det[s3In+A1M]=0
(18)
式中:A1=kns2+kms+kl。對矩陣M進(jìn)行對角化可以得到:
(19)
式中:λ1,λ2,…,λn∈C,為矩陣M的特征根;P的第j個列向量是矩陣M特征值λj對應(yīng)的特征值,P-1為P的逆矩陣。如此式(18)可以寫成:
det[s3In+A1P-1∧P]=0
(20)
(21)
得到式(21)的特征方程為:
(22)
由于特征方程(20)中的控制參數(shù)kl,km,kn的參數(shù)范圍在復(fù)數(shù)域內(nèi),不能直接用實數(shù)求解的方法得出結(jié)果,因此需要根據(jù)1章中復(fù)常系數(shù)線性方程的穩(wěn)定性判據(jù),得到系統(tǒng)穩(wěn)定的參數(shù)范圍。
3 多AGV協(xié)同搬運系統(tǒng)的隊形控制仿真實驗
圖1所示是AGV協(xié)同搬運系統(tǒng)的期望隊形,其中:○表示AGV,三角形為AGV期望隊形結(jié)構(gòu)。
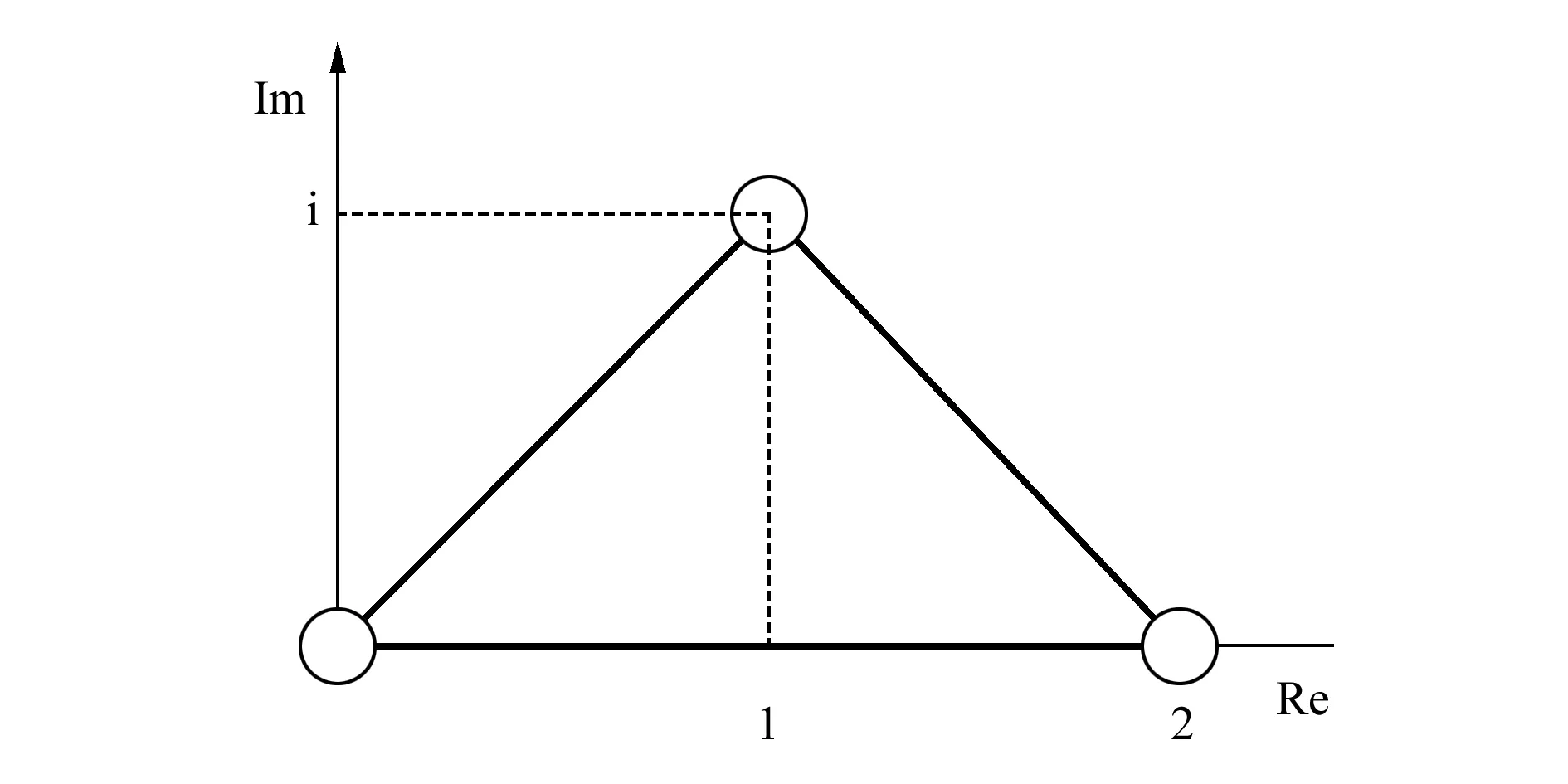
圖1 AGV協(xié)同搬運系統(tǒng)期望隊形
圖1對應(yīng)的各AGV位置ζ為:
ζ=[0 2 1+i]T
(23)
選取的復(fù)數(shù)矩陣M如下:
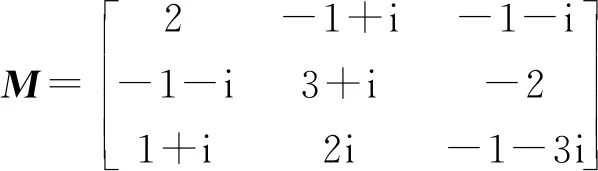
(24)
因為rank(M)=2,所以所有的非零特征值為:
λ1=0.399 5-2.249 6i,λ2=3.600 5+0.249 6i
(25)
由式(15)得到對應(yīng)AGV系統(tǒng)個體模型(式(4))的特征方程為:
s3+(kns2+kms+kl)λi=0
(26)
令kn=kn1+ikn2,km=km1+ikm2,kl=kl1+ikl2,λi=λi1+iλi2。代入式(26)整理可得:
s3+[(kn1λi1-kn2λi2)+i(kn1λi2+λi1)]·s2+[(km1λi1-km2λi2)+i(km1λi2+km2λi1)]s+(kl1λi1-kl2λi2)+i(kl1λi2+λi1)=0
(27)
進(jìn)一步整理,令:
(28)
則式(27)可以簡化為:
s3+(a1+ib1)s2+(a2+ib2)s+a3+ib3=0
(29)
對式(6)和式(8)的系數(shù)進(jìn)行變量定義
(30)
根據(jù)文獻(xiàn)[16]得到的遞推公式如式(11)所示。
結(jié)合式(11)和式(12)可得:
(31)

根據(jù)2.1節(jié)復(fù)常系數(shù)線性系統(tǒng)穩(wěn)定性判據(jù)得到的系統(tǒng)穩(wěn)定充分必要條件是T1>0,T2>0,T3>0。將式(28)代入式(31)中,并滿足不等式均大于0的條件,由此可以得到控制參數(shù)kl,km,kn的不等式方程組:
(32)
式中:a1,1=(kn1λi1-kn2λi2)3·(km1λi1-km2λi2)-(kn1λi1-kn2λi2)2·(kl1λi1-kl2λi2)+(kn1λi1-kn2λi2)2(kn1λi2+kn2λi1)(km1λi2+km2λi1)-(kn1λi1-kn2λi2)·(km1λi2+km2λi1)2;b1,2=(kn1λi1-kn2λi2)3(kl1λi2+kl2λi1)-(kn1λi1-kn2λi2)2·(kn1λi2+kn2λi1)·(kl1λi1-kl2λi2)+(kn1λi1-kn2λi2)·(km1λi2+km2λi1)·(kl1λi1-kl2λi2)。
將得到的特征根λ1,λ2代入到式(32)中的第一個公式可以得到:
(33)
由不等式(32)能夠得到控制參數(shù)kn的實部kn1與虛部kn2的取值范圍。但由于計算量較大,在kn目標(biāo)范圍內(nèi)需要選擇kn的一個定值,代入不等式計算得到kl和km的數(shù)值參數(shù),顯然這個結(jié)果范圍是包含在保持協(xié)同隊形穩(wěn)定的控制參數(shù)kl和km正確值范圍之內(nèi)。需要注意的是,當(dāng)kn的值發(fā)生變化時,另外兩個值kl和km也會隨之發(fā)生變化。這里選取kn=1,進(jìn)而得到kl,km的取值范圍,從而得到4個不等式和4個未知解,按照同樣的解法選擇范圍內(nèi)的一個值,不斷迭代,得到最終的結(jié)果。
首先,選取其中的一組解,即控制參數(shù)kl=1、km=-3、kn=1,則系統(tǒng)的特征方程為:
s3+(s2-3s+1)(0.399 5-2.249 6i)=0
(34)
s3+(s2-3s+1)(3.600 5+0.249 6i)=0
(35)
根據(jù)復(fù)常系數(shù)線性方程穩(wěn)定性判據(jù)的成立條件:
T1=0.654 9>0,T2=2.151 6>0,T3=5.674 5>0
T1=11.854 2>0,T2=565.16>0,T3=3 123>0
即滿足所有的Ti>0的充要條件,由此可知選取的參數(shù)kl=1、km=-3、kn=1能夠使AGV協(xié)同隊形保持穩(wěn)定。得到的協(xié)同AGV編隊軌跡仿真結(jié)果如圖2所示,其中各AGV從初始位置點[-0.5+i,3.5-0.75i,-0.5+3.5i]開始運動,最終形成了所期望三角形隊形,并以一定的速度保持該三角隊形持續(xù)運行下去。

圖2 協(xié)同AGV編隊軌跡仿真圖
圖3為各AGV沿著兩個方向分量的時間坐標(biāo)值曲線圖,可以看出各AGV雖然初始位置各不相同,但是在分布式PID隊形保持器的控制作用下,各方向的坐標(biāo)值很快趨于穩(wěn)定,并沿著相同的變化曲率持續(xù)運動。
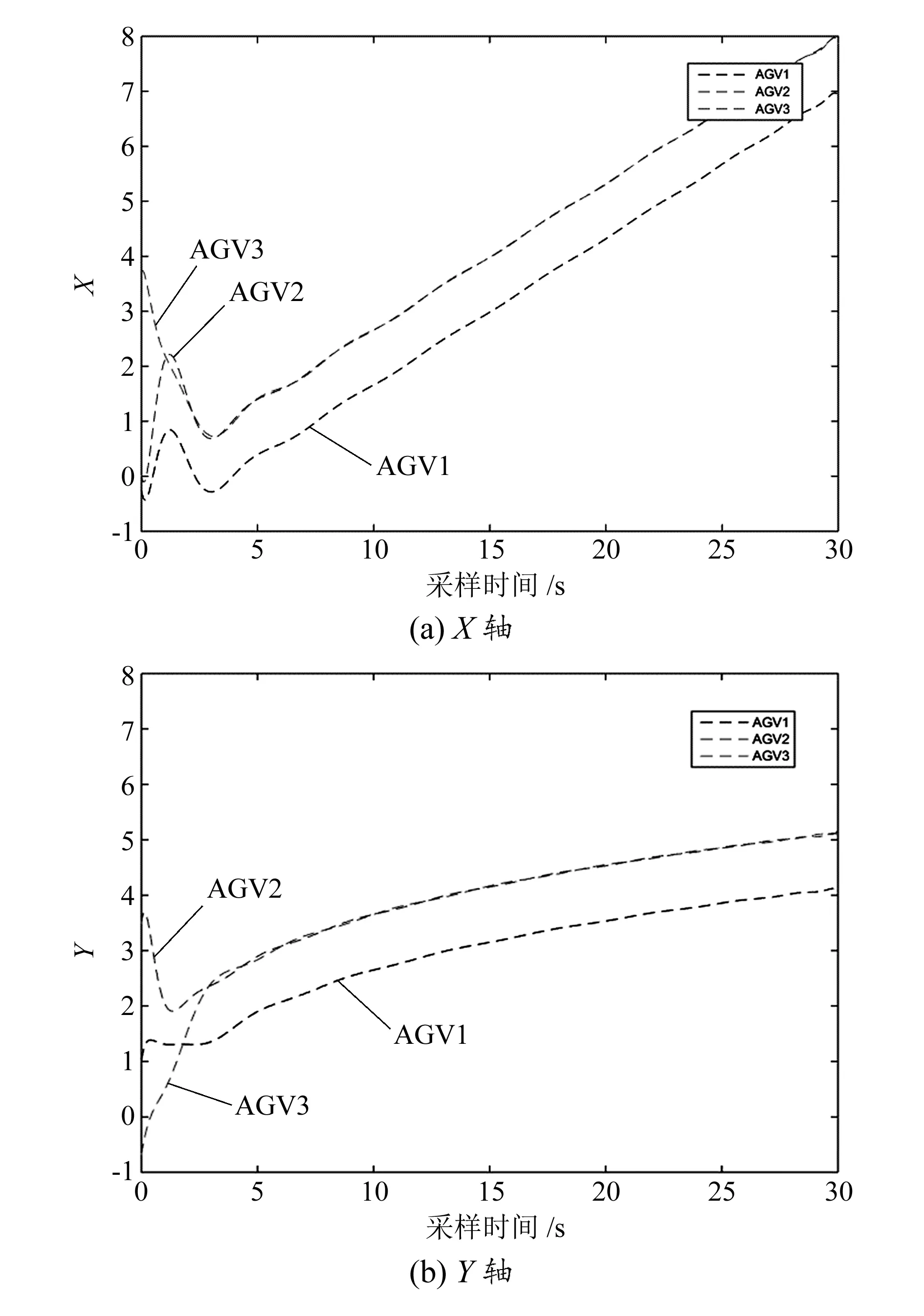
圖3 協(xié)同AGV隊形的坐標(biāo)值變化曲線圖
隨后,選取控制參數(shù)kl=-1、km=-3、kn=2為滿足不等式(31)的另一組解,則系統(tǒng)的特征方程為:
s3-(s2+3s+2)(0.399 5-2.249 6i)=0
(36)
s3-(s2+3s+2)(3.600 5-0.249 6i)=0
(37)
代入到復(fù)常系數(shù)線性方程穩(wěn)定性判據(jù)的成立條件:
T1=0.654 9>0,T2=2.151 6>0,T3=-2.883<0
T1=11.62>0,T2=-96.581<0,T3=-0.997 5<0
即存在Ti<0的情況,不滿足協(xié)同AGV系統(tǒng)編隊穩(wěn)定的充要條件。得到的協(xié)同AGV編隊軌跡仿真結(jié)果如圖4所示,可以看出在初始位置相同的情況下,該組控制參數(shù)下協(xié)同系統(tǒng)無法形成期望隊形,從另一個角度證明了本文隊形控制協(xié)議的有效性。
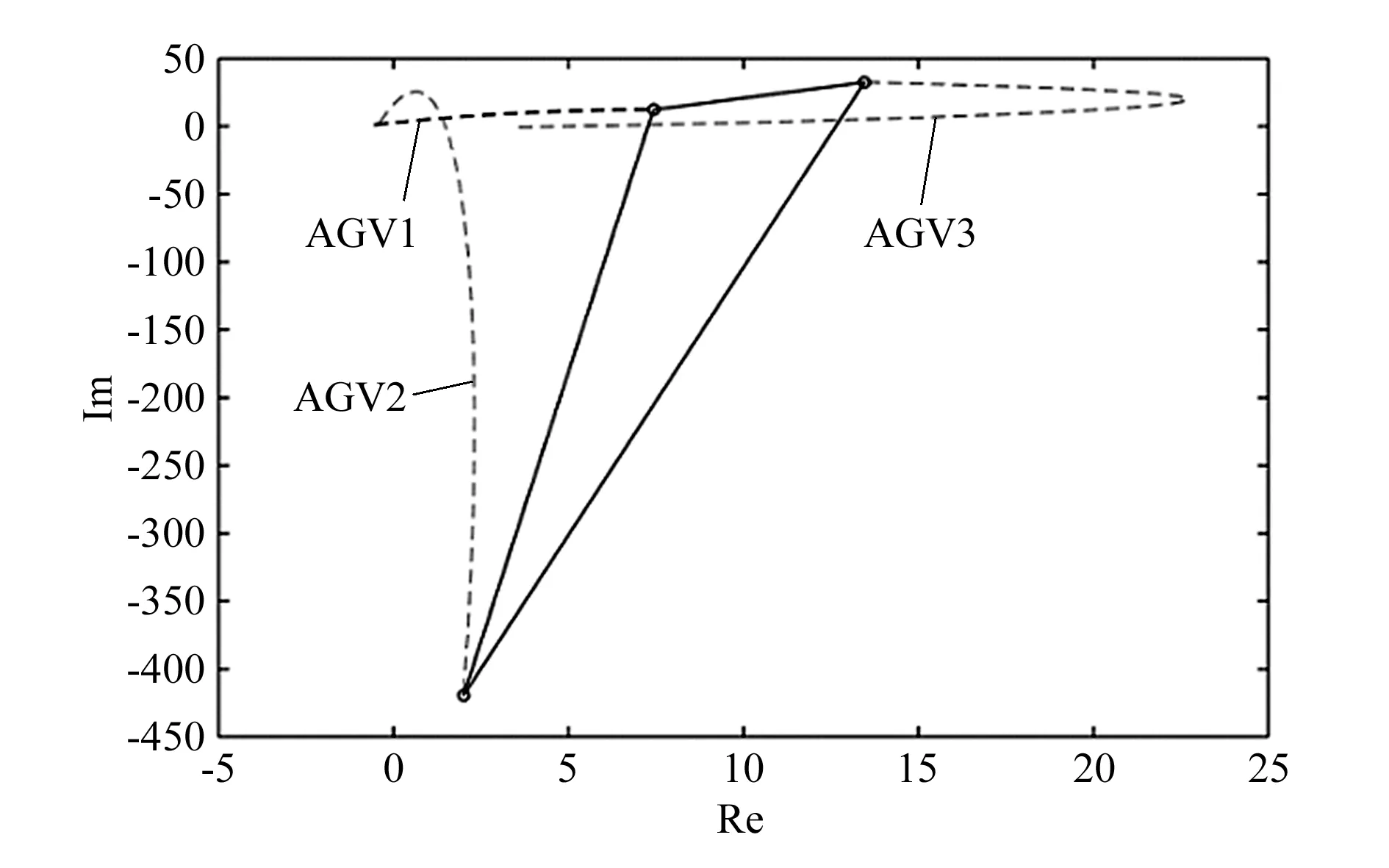
圖4 協(xié)同AGV編隊軌跡仿真圖
4 結(jié)束語
本文針對多AGV協(xié)同搬運中的隊形控制問題,提出了一致性協(xié)議式,通過拉普拉斯變換,將協(xié)同搬運隊形設(shè)計轉(zhuǎn)變?yōu)閰f(xié)同分布式隊形保持器設(shè)計,得到了該類系統(tǒng)穩(wěn)定狀態(tài)下的控制參數(shù)的遞推公式和判據(jù)范圍,最后通過選取正反兩組參數(shù)值進(jìn)行了驗證。后續(xù)還需要進(jìn)一步的試驗支撐或根據(jù)試驗結(jié)論對協(xié)議式和遞推公式進(jìn)行完善。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
