輕型無人機飛行控制系統適航安全性研究
2020-09-02 09:38:14羅秋鳳高艷輝徐偉程王海龍
計算機測量與控制 2020年8期
羅秋鳳,高艷輝,張 銳,徐偉程,王海龍
(1.南京航空航天大學 無人機研究院,南京 211106;2.中小型無人機先進技術工業和信息化部重點實驗室,南京 211106;3.山東長城計算機系統有限公司,山東 煙臺 264003)
0 引言
2018年12月和2019年1月,英國倫敦希斯羅和蓋特威克機場因無人機擾航而關閉,數萬名旅客滯留在機場。2017年4月,我國西南地區多個民用機場遭無人機擾航,造成數百個航班取消和延誤。截止2019年5月,我國無人機登記數量已達33萬多架,最大起飛重量25公斤至150公斤的無人機近3萬架。
針對龐大數量的民用無人機航空活動的自身安全與民機空域安全問題,世界各國航空機構主要從“運行管理”、“適航審定”兩個角度進行管理。“運行管理”的研究側重空中交通管理,從空域劃分、運行限制、空中交通規則等方面研究無人機的飛行安全性。“適航審定”的研究側重無人機系統的設計和制造質量提高、過程質量保證、適航性驗證等方面,主要關注無人機的設計和制造是否符合適航審定要求[1-5]。
我國把起飛全重25公斤至150公斤的無人機歸類到輕小無人機的第四類(IV)[6],隨著機體材料、動力裝置、飛行控制與導航技術的發展,該類無人機的飛行區域可完全融入民機的飛行空域。
2000年至2013年美國空軍無人機系統的MQ-1/MQ-9 Predator捕食者、RQ-4 Global Hawk全球鷹和MQ-9 Reaper收割者三類無人機災難性事故數據表明,無人機系統本體故障是災難性事故的主要誘因,占比近七成,本體故障的主要來源又是機載設備故障[7]。在無人機系統中,飛行控制系統負責無人機的飛行控制、自主導航、飛行管理、任務管理、動力裝置控制、信息交匯等,涉及的機載設備一般包括:姿態角傳感器、姿態角速度傳感器、高度傳感器、速度傳感器、航向傳感器、導航定位傳感器、多個伺服作動器、飛控計算機、檢測與避障裝置等主要10種機載設備。飛行控制系統設備種類多,占比大,對無人機系統飛行安全影響大,因此有必要研究飛行控制系統期望安全性水平、飛控機載設備失效對輕型無人機飛行安全性的影響。其中的檢測與避障裝置基本在文中不對其討論分析。
1 LUAV的期望安全水平
JARUS的WG6工作組在充分考慮到無人機系統特點的情況下,對載人航空器(簡稱 “有人機”)的“1309”標準進行剪裁,于2015年11月發布了第二版的無人機系統安全評估的可接受符合性方法AMC RPAS1309[8]。
1.1 復雜性等級分類
根據載人航空器現有的初始適航要求,目前主要使用諸如重量、乘客數量、發動機類型/數量和性能等參數來區分飛機等級。為了更好地適應無人機的新特點,同時考慮到便于后續研制保證等級(DAL)的分配,AMC RPAS1309提出了一種基于系統復雜性等級(CL)的分類方案。根據該方案將無人機系統分為以下四類:
1)復雜性等級I(CL I):自動駕駛與自主執行任務的功能具有一定的權限,并始終提供無人機駕駛員的手動操控權限。軟件和機載電子硬件(AEH)的使用是有限的比CL I的高;
2)復雜性等級II(CL II):控制系統可具備無人機系統飛行管理的全部權限,能自主執行任務。萬一出現失效,如果需要的化,無人機駕駛員可以介入,除非故障條件可以證明是極不可能的。軟件和機載電子硬件(AEH)被廣泛地大量使用;
3)復雜性等級III (CL III ):具有完全的自主控制權限,這一類無人機系統在RPAS1309中不探討。
1.2 期望安全水平
數據統計表明,具體見表1,歐洲航空安全局頒布的CS-25大型運輸類飛機的目標安全水平1×10-6/h(來源AMC 25.1309)與真實事故率4.8×10-6/h具有相同的數量級,并提供了保守的安全裕度;對于CS-23 I正常類飛機目標安全水平1×10-4/h(AC 23.1309-1E)接近非公共交通類常規飛機的真實事故率1.79×10-4/h[9-11]。
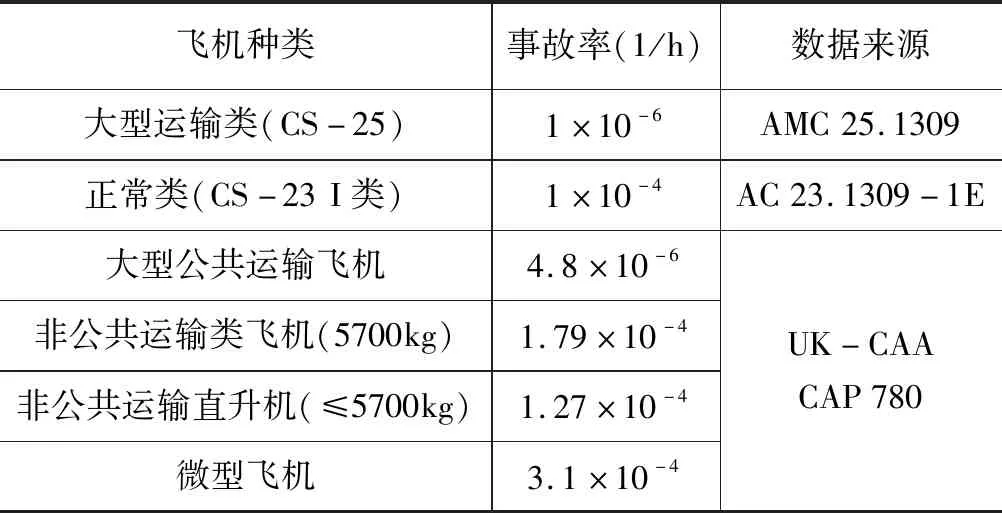
表1 有人機實際事故率與適航安全目標水平的對比表
正常類有人機發生致命事故的概率值大約為每萬飛行小時1次,即事故率為1×10-4/h。其中飛機自身故障導致的事故大約占事故總數的10%,并且一般假定一架飛機大約有10種潛在的災難性失效,如果是復雜度高的,或者大型飛機一般假定100種災難性失效,因此有人機目標安全水平定為1×10-6/h,復雜度高的或大型飛機目標安全水平定為1×10-7/h。考慮到無人機適航安全的最終目的是融入民航空域,所以JARUS的WG6工作組基于等效安全原則推定復雜度CL I 輕型固定翼或旋翼無人機的目標安全水平為1×10-6/h,復雜度CL II 輕型固定翼或旋翼的目標安全水平為1×10-7/h。
2 無人機系統失效狀態分類
無人機系統的失效影響嚴重程度分為輕微的、重大的、危險的、災難的共4種類型,定義內容因無人機特性而與有人機略有不同,具體如表2所示,從安全性邊界、操縱特性、遠程機組工作負荷、任務完成情況、致命情況5個方面進行評估。
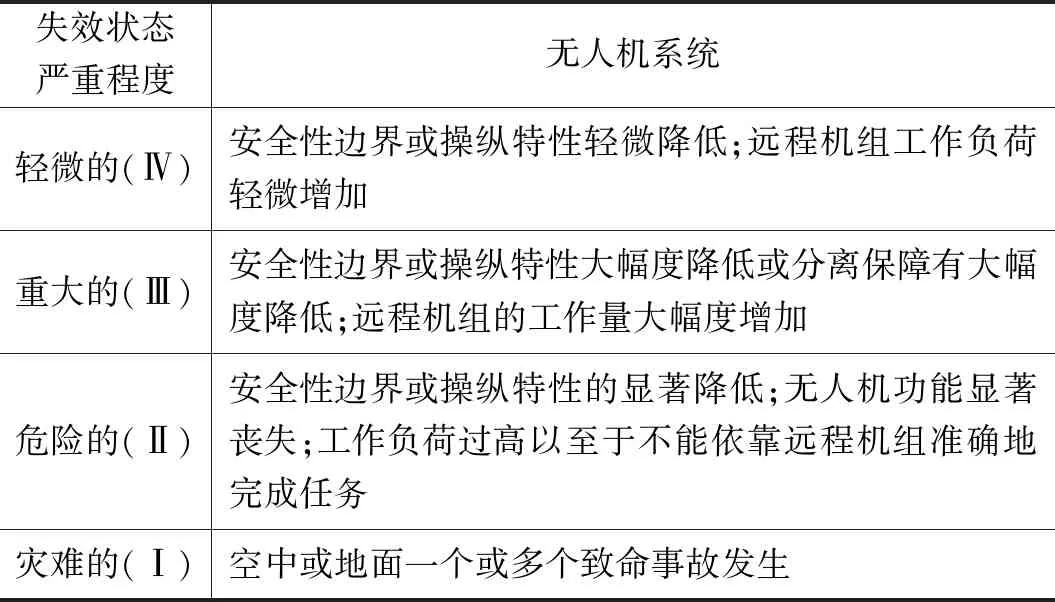
表2 無人機系統失效狀態嚴重程度定義
3 飛行控制系統對飛行安全性的影響
3.1 飛行控制系統組成架構
飛行控制系統一般包括飛控計算機、傳感器和伺服作動設備。傳感器用于感受無人機的姿態、航向、角速度、位置、速度等信息;飛控計算機進行飛行和任務設備信息的采集與處理,形成控制信號;伺服作動設備,包括舵回路板和舵機兩部分,接收飛控計算機輸出的控制信息,進行功率放大,驅動舵面和發動機節風門等機構進行相應的動作。飛行控制系統是典型的閉環反饋控制系統。相對有人機而言,無人機的飛行控制系統是全時限、全權限的[12]。
以某輕型無人機系統為例,飛機最大起飛重量為150公斤,巡航速度每小時180公里,巡航高度5 000米。飛行控制系統包括:飛控計算機、升降舵機、副翼舵機(1左1右)、方向舵機、油門舵機、傘降舵機、垂直陀螺、速率陀螺、衛星接收機、大氣數據計算機、磁力計等,具體組成與接口關系如圖1所示。圖中遙控遙測屬于測控分系統,該無人機還具備傘降回收控制能力。飛行控制系統把舵回路板融合進了飛控計算機,無人機飛控計算機是無人機的指揮中樞;垂直陀螺輸出無人機的實時俯仰角、滾轉角;速率陀螺輸出三軸姿態角速度;衛星接收機輸出經度、緯度、速度、高度、高度變化率、航跡角等;大氣數據計算機輸出大氣高度、指示空速、真空速等;磁力計輸出航向角;舵機是無人機舵面偏轉的執行機構。
因此,以整體整合一體化自主調控為核心,整合基礎醫學各學科內容,構建了系統整合課程。例如將呼吸系統、心血管系統和血液系統充分整合,將消化系統、內分泌系統、泌尿生殖系統充分整合,課程以整體整合的理念,將形態結構、功能和治療緊密結合,密切結合臨床應用,希望打破傳統教學中學科間的壁壘,使醫學知識更加系統與完整,以求打破學科界限以實現各學科、各系統知識點的橫向整合,打通基礎課程與臨床課程界限,以實現融會貫通的縱向整合。
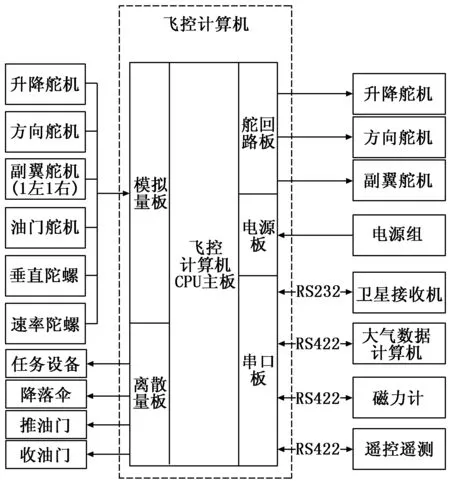
圖1 某型無人機飛行控制系統接口關系圖
3.2 飛行控制方式
無人機飛行控制方式采用程控、遙控與自主飛行3種模式,以三維自主飛行方式為主[13]。飛行控制可以分為相對獨立的縱向控制通道和橫航向控制通道,該型無人機的縱向控制通道的控制原理如圖2所示,采用經典的比例—積分—微分(PID)控制方法,圖示中沒有體現積分環節,因為該環節在特定條件下加入。該無人機的縱向運動主要包括俯仰和升降運動,通過升降舵來實現的。由于無人機沿縱向平面具有對稱性,橫航向控制通道工作原理同理。

圖2 某型無人機縱向控制通道的控制原理圖
3.3 功能危險分析
飛行控制系統的功能是產生控制指令,穩定飛行姿態角(俯仰角、滾轉角、航向角),控制發動機轉速和飛行航跡(爬升、巡航、左右盤旋、高度保持、下降),使無人機達到給定的飛行狀態、按期望的軌跡飛行,并實現對干擾的抑制。
該型無人機的飛行包絡線為起飛(T)、空中自主飛行(F),和傘降回收(L)三個階段。起飛階段,以程控模式,按規定航向爬升切入航線的初始航點,起飛段封鎖橫向遙控指令。空中自主飛行段按航路設置進行爬升、或下滑、拐彎、平飛飛行,并按要求執行任務。傘降回收段分兩段,從航路的末航點調整飛行至指定空域的開傘高度和航向,然后彈出降落傘,關閉發動機。對飛行控制系統進行功能危險分析,具體見表3,表中的“短時不足”、“持續不足”中的不足定義為,期望值與實際值存在固定的或隨機的偏差。
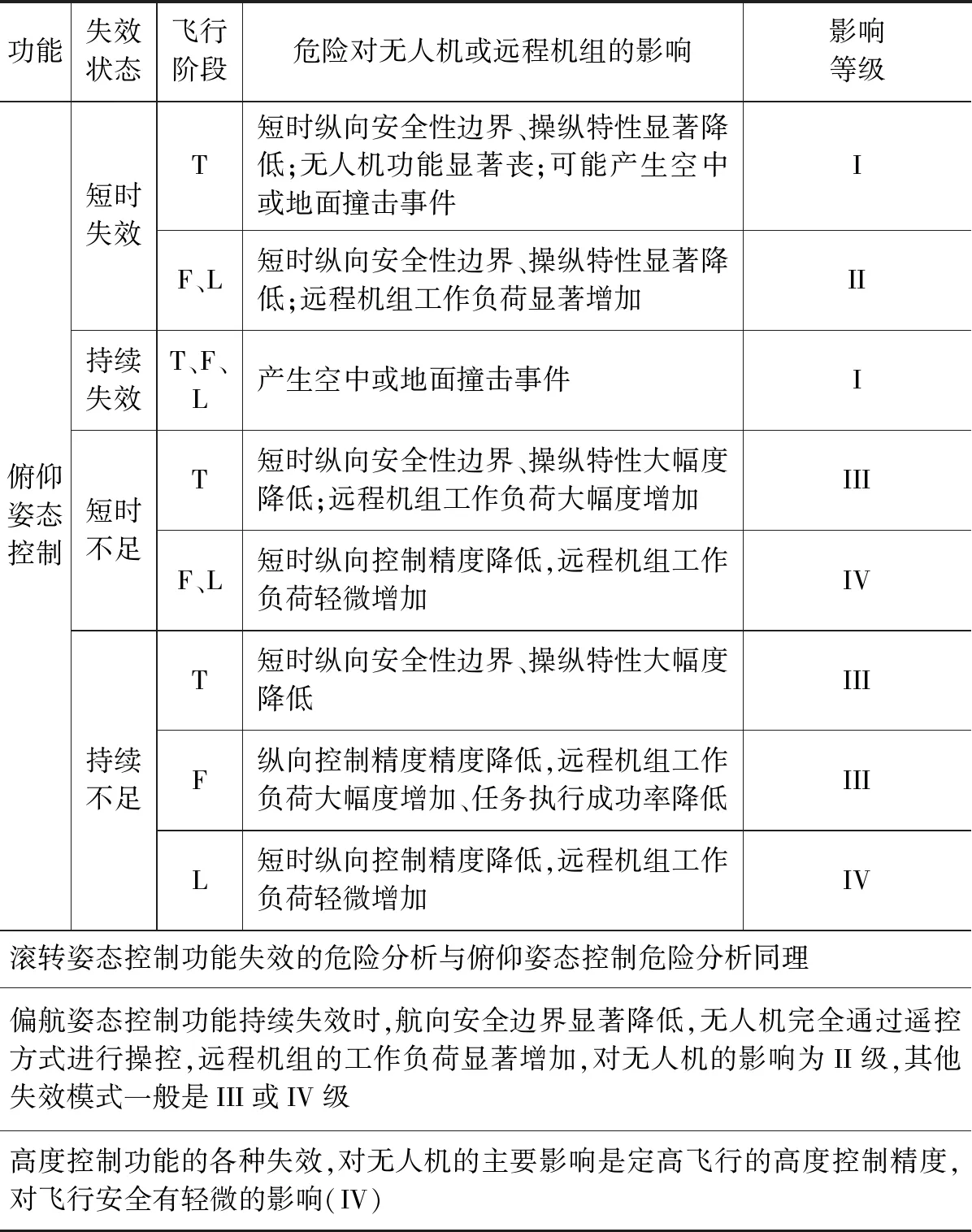
表3 某型無人機飛行控制系統的飛行控制FHA
表3說明,俯仰或滾轉姿態控制的失效、偏航姿態控制的持續失效對無人機飛行影響等級為I、II級。起飛段出現俯仰、或滾轉控制的短時失效,無人機掉高,可能致使無人機墜地,一旦進行空中飛行階段后,其影響程度降低。
3.4 部件FMEA
由于俯仰或滾轉姿態控制對無人機飛行安全影響至關重要,首先分析姿態傳感器,如垂直陀螺(輸出俯仰角、滾轉角)故障模式對飛行安全的影響,具體見表4,其他部件依此進行。

表4 垂直陀螺部件FMEA
速率陀螺輸出的三軸姿態角速度,被用于縱橫向控制中微分環節的輸入信號。當發生姿態角速度振蕩、完全不工作時,無人機遇風等抗干擾能力大大下降,安全邊界大幅顯著降低,對飛行安全的影響等級為II級。
升降舵、副翼舵、方向舵驅動飛機舵面的偏轉,若發生信號振蕩、飽和或卡死、不工作、時工作時不工作的故障時,飛機姿態與軌跡完全不受控,對飛行安全的影響等級為I級。該型無人機的發動機油門開度一旦為零,發動機就停止工作。所以其故障模式影響分析與升降舵、副翼舵、方向舵的故障模式影響分析類似,達到I級影響故障模式存在4種。
衛星接收機輸出的無人機飛行實時經度、緯度、航跡角、速度等信息,被用于自主導航控制解算、平飛時縱向控制率解算。發生信號振蕩、飽和、不工作、時工作時不工作故障時,可采用磁力計和大氣數據計算機信息進行計算[15],并切換至遙控方式飛行,但無人機的三維自主飛行功能顯著喪失,遠程機組工作負荷顯著增加,故障影響程度為II級。大氣數據計算機、磁力計發生故障時,因這兩者為自主導航飛行時衛星接收機的備份傳感器,故障影響程度為III或IV級,漂移故障對飛行安全沒有影響。
某輕型無人機飛行控制系統部件發生故障后對飛行安全影響程度清單見表5。
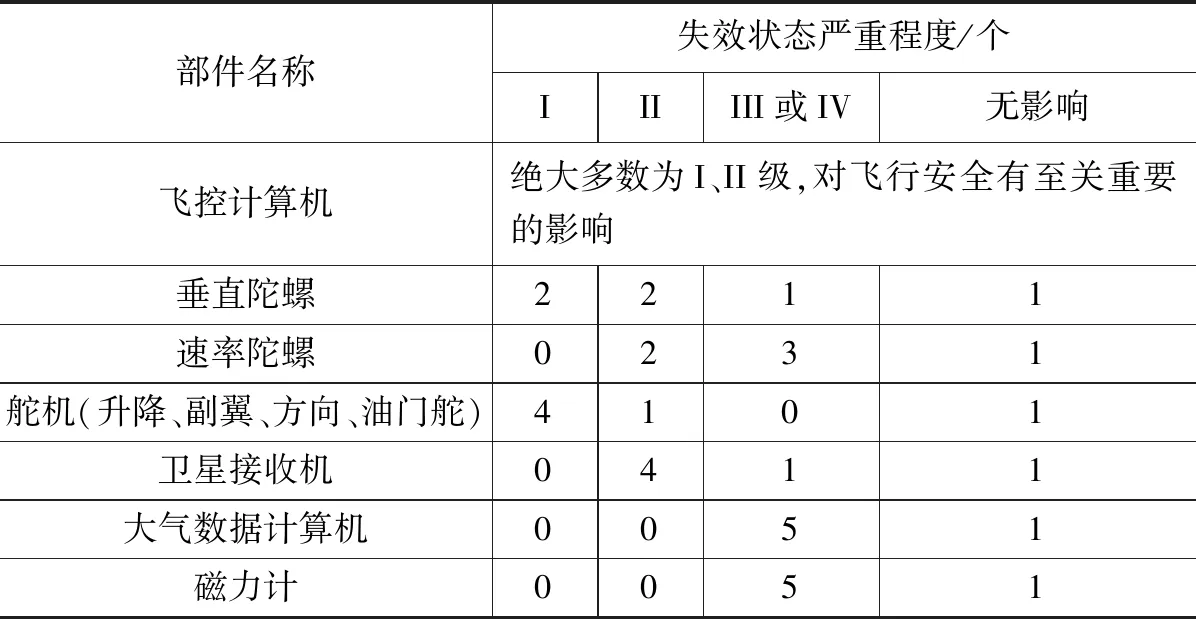
表5 某輕型無人機飛行控制系統部件失效影響嚴重程度清單
3.5 安全關鍵清單和期望安全水平
通過飛行控制系統FHA和FMEA分析,對無人機飛行安全產生重要影響的飛行控制系統關鍵部件為飛控計算機、姿態角傳感器、舵面執行機構和衛星接收機。
我國輕小型無人機中的IV類規定最大起飛重量不超過150公斤,由于起飛重量大,飛機機艙空間也大,機載設備隨著技術的進步體積已越來越微小型化,無人機的自主控制能力逐步增強,其復雜度越來越高,因此可設定未來起飛全重25公斤至150公斤的輕型無人機的適航安全水平為復雜度CL II級的目標安全水平,具體期望指標為1×10-7/h。基于飛行控制系統的FHA與部件的FMEA分析,飛行控制系統在研制過程中目標安全水平為1×10-7/h,飛控計算機、姿態角傳感器、舵面執行機構這類對飛行安全起關鍵作用的部件的目標安全水平為1×10-7/h,衛星接收機、角速率傳感器目標安全水平為1×10-6/h,高度/速度傳感器、航向傳感器的安全性水平與其使用方式有關,鑒于目前無人機自主導航控制信息來源一般為衛星接收機(GPS/BD/GLONASS),高度/速度傳感器、航向傳感器的安全性水平被降低等級,具體如表6所示。根據ARP4754A的研制保證等級(DAL)的分配原則[14]和JARUS 2015年11月發布的關于無人機安全評估標準RPAS1309,“失效狀態嚴重性越高,對應的DAL等級越高”。研制過程的質量保證等級分為5個等級:A、B、C、D、E,A等級最高。輕型無人機的期望安全水平經分析為1×10-7/h,沒有達到1×10-9/h的民航客機要求,所以飛控計算機、姿態角傳感器、舵面執行機構研制過程的質量保證等級建議為B。
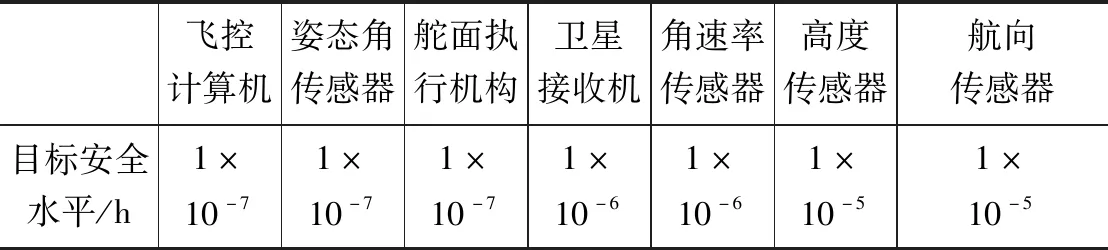
表6 輕型無人機飛行控制系統期望安全水平
4 實驗結果與分析
由于飛行控制系統部件多,下面選兩個部件姿態傳感器和飛控計算機故障進行驗證分析。基于該輕型無人機系統,在飛行控制系統半實物仿真平臺進行仿真飛行試驗。在自主飛行的平飛段注入姿態角傳感器的滾轉角信號輸出故障(圖4),試驗發現無人機俯仰姿態劇烈振蕩,并逐漸開始發散,如圖5所示。
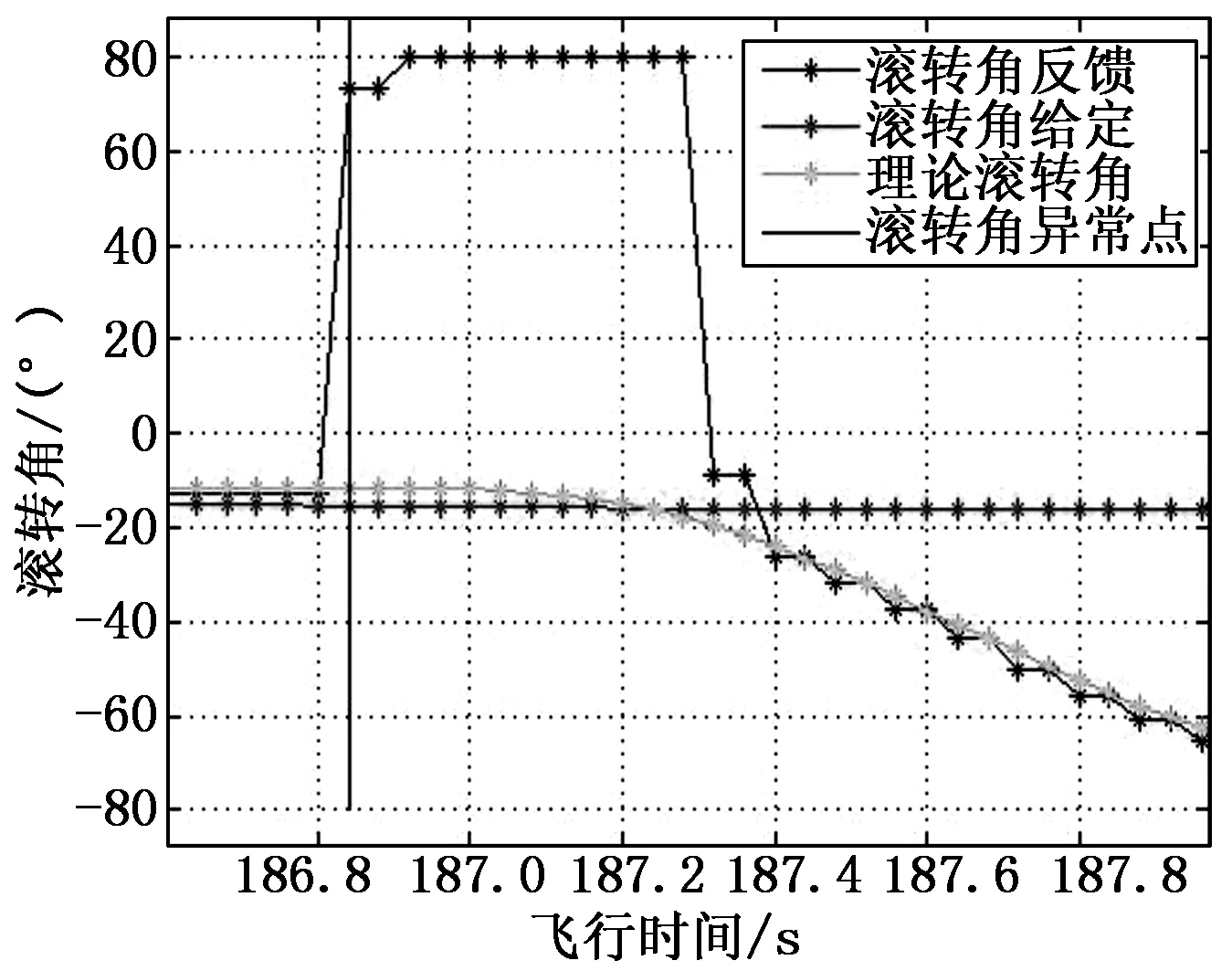
圖4 平飛段滾轉角異常曲線
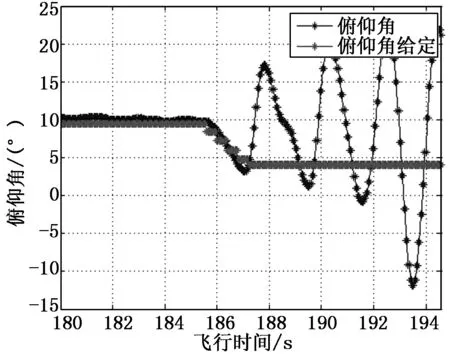
圖5 平飛段俯仰角曲線
某次外場飛行試驗的中,不明原因導致無人機機上27伏供電電源被拉低,飛控計算機復位,無人機俯仰、滾轉姿態劇烈變化,飛行試驗險些失敗。飛控計算機復位后無人機姿態曲線如圖6所示。
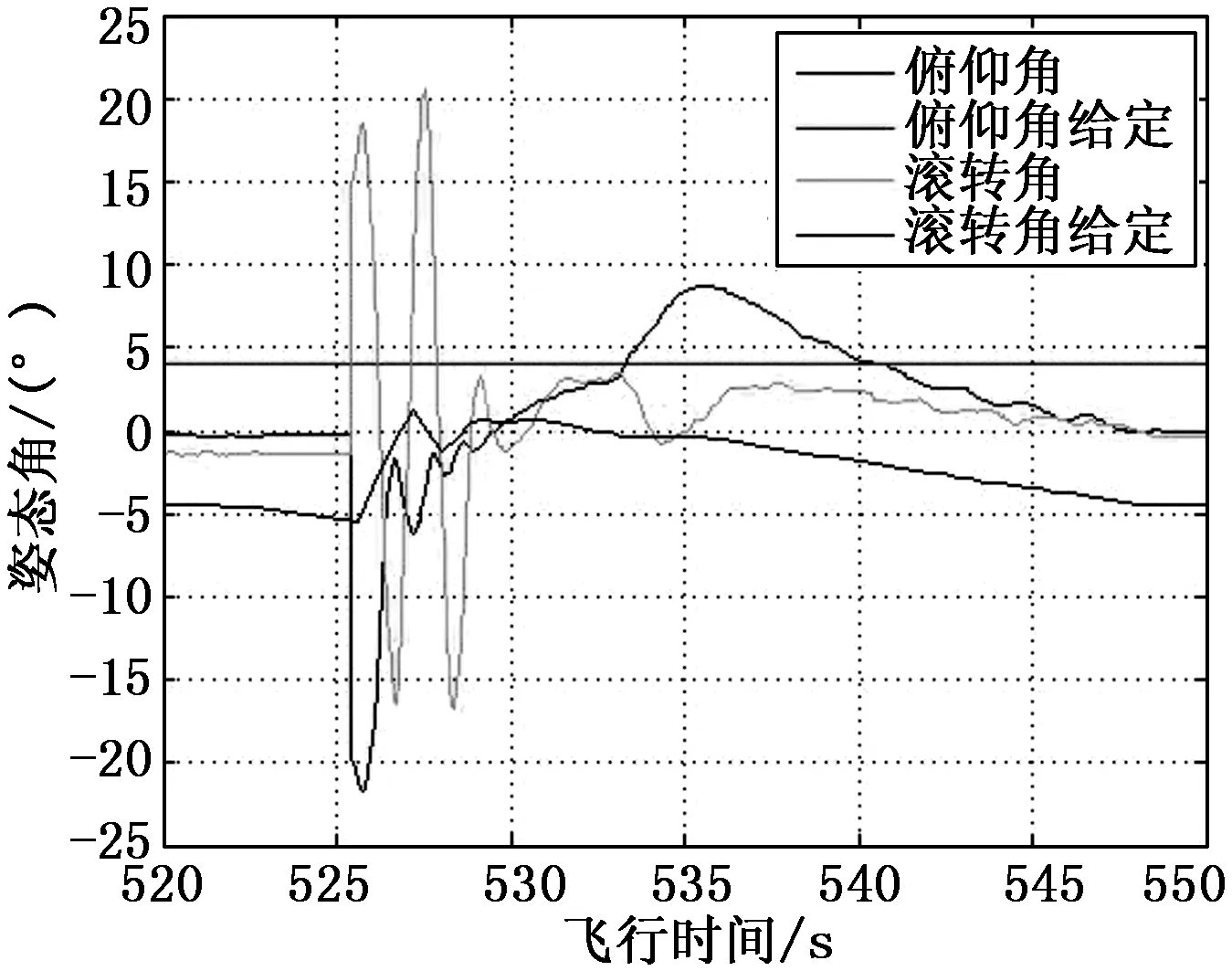
圖6 飛控計算機復位后無人機姿態曲線
飛行控制系統半實物仿真中的滾轉角故障和空中飛行試驗中飛控計算機復位問題,驗證了兩個設備對無人機飛行安全具有重要作用。安全關鍵清單中的舵面執行機構、衛星接收機的失效影響也可依此進行仿真驗證。
5 結束語
從民機事故統計的角度討論了民機目標安全水平的確定方法,通過FHA和FMEA確定了輕型無人機飛行控制系統影響飛行安全的關鍵部件為飛控計算機、舵面執行機構、姿態角傳感器、衛星接收機,飛行控制系統及其重要部件的目標安全水平為1×10-7/h。
起飛全重25公斤至150公斤的無人機系統,可飛行至民機的飛行空域執行復雜任務,其飛控計算機,軟硬件功能強大而復雜,接口信號可達百路之多,飛行控制軟件源程序代碼也上萬行。飛控計算機的故障種類多、數量多,是影響無人機飛行安全的關鍵要素中的關鍵,其研制過程中質量保證等級建議提高到最高等級A級。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
人大建設(2019年12期)2019-05-21 02:55:32
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
