基于主成分分析和奇偶向量的車輛導航系統冗余IMU故障動態檢測方法
2020-09-02 08:31:34郝海燕王新軍
計算機測量與控制 2020年8期
郝海燕,王新軍
(1.咸陽師范學院 物理與電子工程學院,陜西 咸陽 712000;2.火箭軍工程大學,西安 710025)
0 引言
隨著導航技術的發展,車輛導航系統與人們的生活息息相關。為了準確地定位車輛位置,導航系統必須能夠實時提供精準的速度、加速度等信息[1-3]。由于GPS也有它本身劣勢,比如信號差、有誤差、更新頻率低等問題,所以僅靠GPS無法滿足車輛實時高精度定位需求,這時就需要采用IMU(inertial measurement unit)慣性測量單元來彌補GPS的不足。IMU慣性測量單元擁有更高的更新頻率,而且不受信號影響,可以很好地與GPS形成互補[4-5]。IMU通常由陀螺儀、加速劑和算法處理單元組成,通過對加速度和旋轉角度的測量得出自體的運動軌跡,在導航中有著很重要的應用價值。
導航系統的傳感器冗余設計是提高可靠性的一種重要手段,即利用具有一定裕度的較低可靠性部件來提高系統的整體可靠性。然而,隨著導航系統的完善以及IMU傳感器數目的增多,系統的故障率也大大提高,從而使整個系統的導航精度和可靠性下降。因此需要對導航系統的冗余IMU進行故障檢測與隔離。當有傳感器故障時,能將故障傳感器及時檢測出來,并從系統中隔離掉,使系統仍能夠正常工作。關于冗余IMU的故障診斷方法目前已發展了許多方法,如文獻[6]針對冗余捷聯慣組故障檢測問題,采用廣義似然比法驗證在特定冗余捷聯慣組配置下的故障檢測的可行性及其檢測效果;文獻[7]針對Potter算法構造解耦矩陣的廣義似然比故障檢測方法無法檢測并隔離特定軸故障,提出了選擇正交投影矩陣的極大無關組來構造解耦矩陣,采用全數宇仿真對改進方法進行驗證;文獻[8]基于矩陣的QR分解,提出了與奇異值分解法相類似的故障診斷方法;文獻[9]基于奇異值分解法,研究了降階等階向量在兩度故障下的應用。此外,閾值比較法、小波變換法、神經網絡法、解析模型法、支持向量機法、主成分分析法、等價空間法等[10-12]也被分別提出并應用在冗余IMU的故障檢測中。
上述方法中,閾值比較法難以確定合理閾值,小波變換法存在小波基和分解層數難以確定問題;神經網絡法存在隱含層難以確定,模型訓練受樣本固定等不足;解析模型法的數學模型過于復雜,計算量大,存在較大延時,難以實現實時故障檢測。而主成分分析法僅僅應用于靜態情況下的故障檢測與隔離,傳統的PCA方法并未考慮車輛動態情況下的實時檢測;奇異值分解法存在缺少單位化、閾值偏大和隔離策略人為影響等局限性。
針對主成分分析法無法在動態情況下對冗余IMU進行故障檢測的缺點,本文提出了一種基于奇偶空間法改進主成分分析的故障檢測算法,利用奇偶空間法隔離車輛的運動,消除動態變量對故障檢測的影響,再用PCA方法檢測數據以實現對車輛傳感器信息的實時檢測,該方法利用奇偶向量隔離車輛的動態變量,以消除動態變量對故障檢測的影響,通過仿真試驗證了本文改進方法的有效性。
1 冗余IMU故障模型
在車輛導航系統中,GPS有很多時候是精度不夠準確或者無效的。例如在隧道中,經常因為信號不好而無法使用。在市中心的高樓里,GPS信號容易被折射反射。此時,IMU就可以增強GPS的導航能力。圖1為車輛導航系統IMU工作區域示意圖。
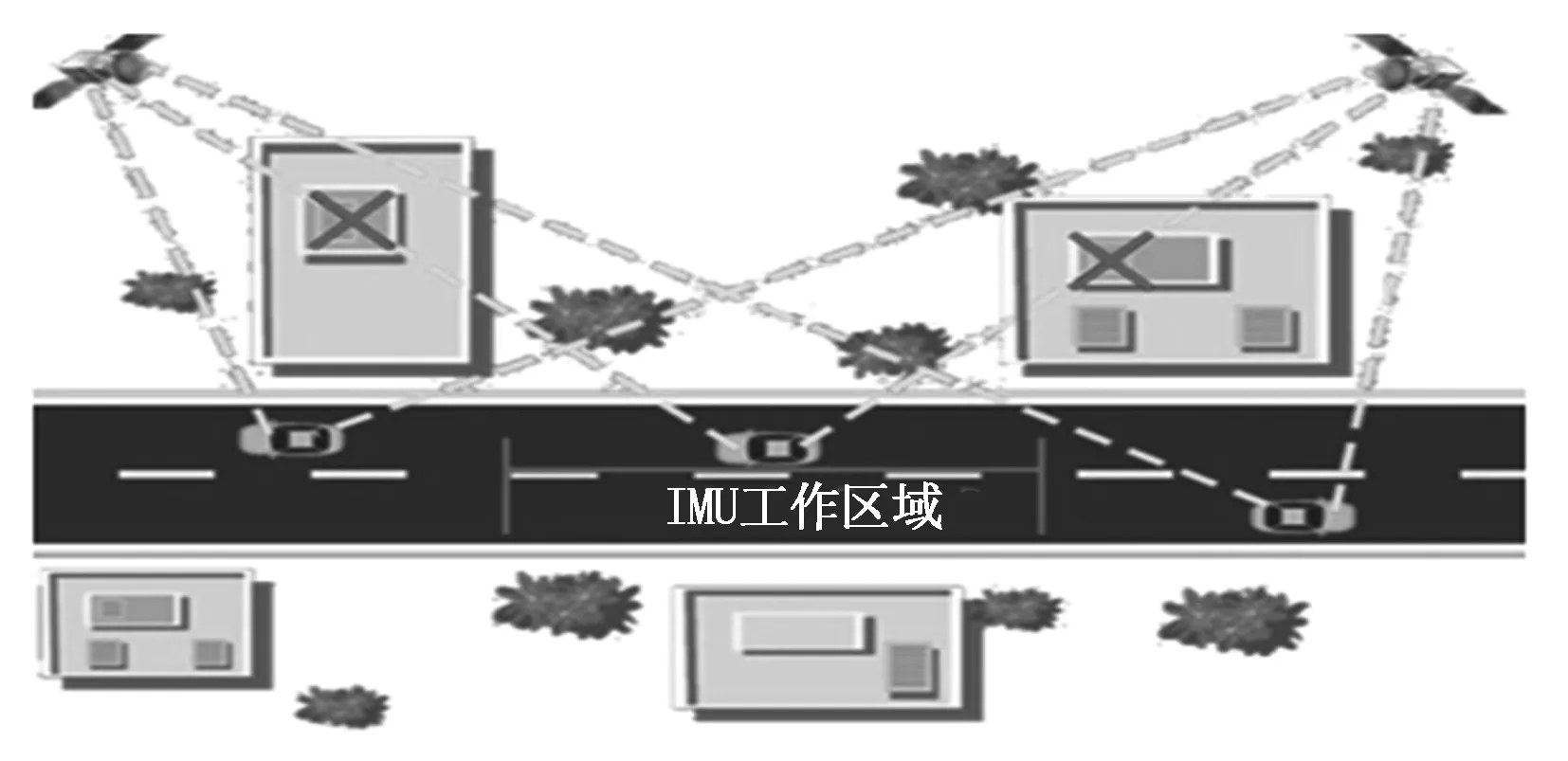
圖1 車輛導航系統IMU工作區域示意圖
假定冗余IMU慣組配置有n(n>3)個慣性傳感器,IMU測量方程中僅含白噪聲項:
Y=HX+e
(1)
其中:X∈R3×1是待測的慣性狀態信息,如三軸加速度或三軸角速度,Y∈R3×1是n個傳感器的測量值,H是冗余IMU慣組配置的測量矩陣,已知rank (H)=3,e∈Rn×1是高斯白噪聲。
定義冗余IMU的故障向量a=[…0b0…]T,只有一個非零元b,且非零元對應于故障傳感器,b為故障幅值,那么發生故障的量測方程為:
Z=HX+e+a
(2)
選取解耦矩陣V,滿足VH=0。構造等價向量P=VZ,由式(1)或式(2)可得:
P=VZ=Ve
(3)
P=VZ=Ve+Va
(4)
如此,等價向量P中將不含有載體的慣性信息,只包含誤差信息和故障信息,可利用等價向量P進行故障診斷,而解耦矩陣V具有不唯一性。
2 主成分分析
PCA是識別數據的一種方式,它主要是突出數據的相似性和差異,因為數據識別很難在高維數據中實現,所以要對數據進行降維處理。首先,每個數據必須減去每個維度的平均值。
mn’=mn-μn,n=1,…,6
(5)
式中,mn是第n個傳感器的測量值。其次,使用以下等式來計算測量的協方差矩陣:
(6)
協方差矩陣的特征值和特征向量的計算:
∑=UΛUT
(7)
其中:U是由特征向量組成的矩陣(U∈R6×6),并且Λ是特征值對角矩陣(Λ∈R6×6)。這些特征向量是長度都為1的單位特征向量,特征值彼此垂直。事實上,具有最高特征值的特征向量是數據集的主要組成部分,這是數據維度之間最重要的關系。一般來說,一旦從協方差矩陣中找到特征向量,下一步就是根據特征值排序它們,從最高到最低。較小意義的組成部分可以被忽略。
W=[u1,u2,…,um]
(8)
其中:W是由重要的特征向量組成的特征向量,并且m是選擇的維數。
本文使用傳感器數據協方差矩陣的二維特征向量,這將使一些信息被遺漏。最終的數據集的維數將少于原始數據集。通過取兩個最大的特征向量并在這些列中形成具有這些特征向量的矩陣W來構造特征向量。使用特征向量,可以生成來自傳感器數據的圖案:
y=WTmnew
(9)
式中,y表示生成的模式數據,mnew表示檢測故障發生的傳感器輸出。數據y在特征平面上形成指定的圖案,生成的圖案反映傳感器輸出的變化。從這個特性來看,使用PCA可以實現故障檢測。
3 基于主成分分析和奇偶向量的檢測方法
一般來說,車輛具有冗余的慣性傳感器,這些都是熱備式硬件冗余。因此,可以在每個步驟中獲取所有傳感器數據,并將它們全部用于計算主要分量和特征向量。計算的特征向量用于通過將原始數據集轉置到特征平面來形成圖案。然后,故障傳感器的模式將與正常傳感器的模式分離,修改后的PCA使用訓練只計算一次特征向量,該特征向量僅表示正常的傳感器輸出。相反,故障混合傳感器數據產生另一個處理結果。這就是為什么可以用正常的傳感器數據檢測到故障的原因。因此,移動運動的效果會產生不同的模式,必須隔離。平價空間概念有助于消除運動的負面影響。改進PCA的故障檢測過程如圖2所示,主要分為兩個步驟,預處理和在線故障檢測過程。
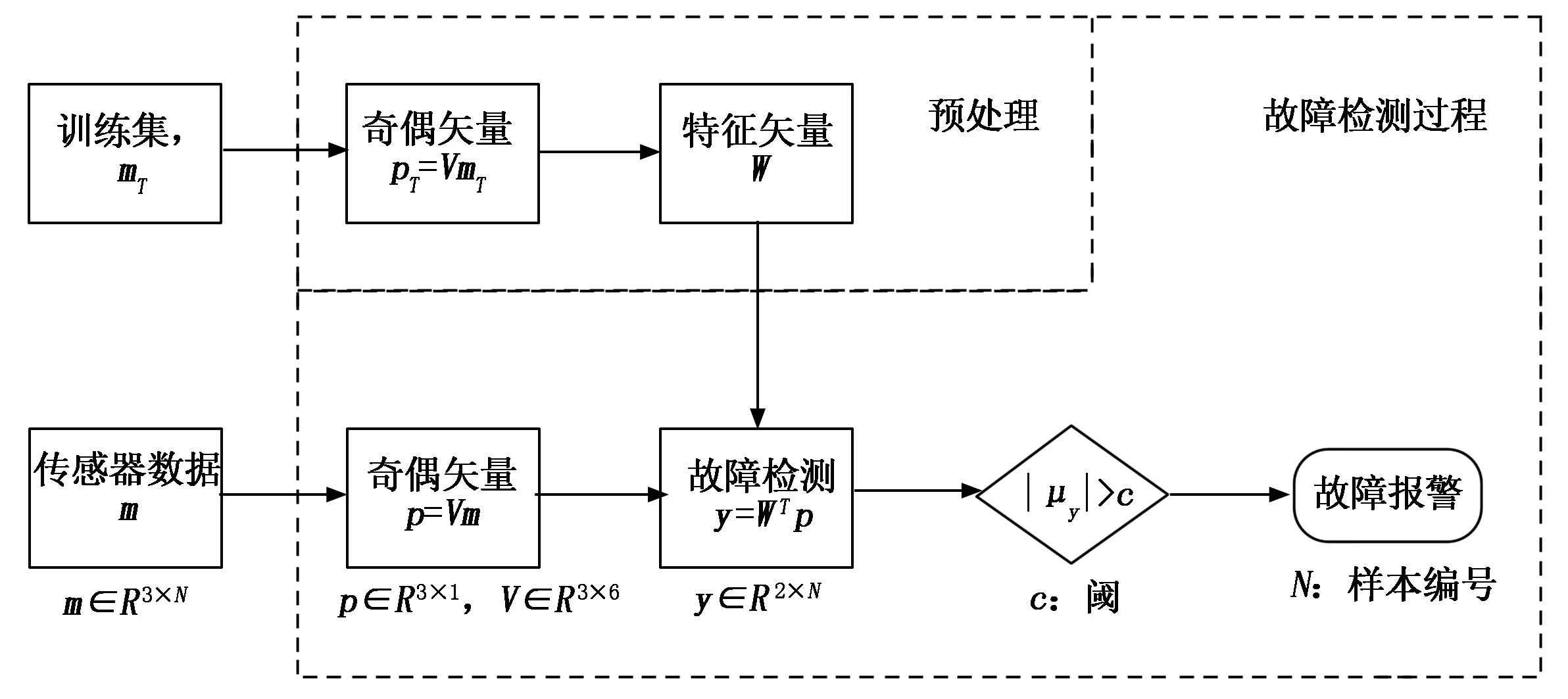
圖2 改進后PCA故障檢測過程
3.1 使用奇偶空間概念修改PCA
具有N個傳感器的慣性傳感器模塊的測量定義為m。有關測量的細節將在模擬部分介紹。而且,故障信號矢量和故障類型被建模為恒定偏差。矩陣V定義如下。
定義1 矩陣V是一個正定梯形矩陣,滿足以下條件:
VH=0
(10)
VVT=IN-1
(11)
(12)

定義2 矩陣V的列空間被定義為測量矩陣H的“奇偶空間”。
定義3 奇偶向量由。定義:
p=Vm=VHx+Vf+Vε=Vf+Vε
(13)
(14)
式中,p是N-l維向量。奇偶向量意味著測量值m在奇偶空間上的投影,并且獨立于狀態變量,但取決于系統故障。在(14)中,Pi是每次測量的奇偶性值。
定義4V的列是測量方向投影到奇偶空間上的投影,它們被稱為故障方向,因為第k次測量mk的故障意味著奇偶矢量p在故障方向vck上的增長。另外,vck的故障方向上的矢量vckmk被稱為故障方向矢量。故障方向角定義為兩個故障方向矢量之間的角度。
不受傳感器運動影響的特征向量是使用奇偶向量p生成的,而式(15)是由修改的PCA計算的特征向量。
y=WTp=WTVf+WTVε
(15)
圖3顯示了當冗余IMU移動時,修改后的PCA和傳統PCA之間的生成模式的差異。由于傳感器的動態運動,傳統的PCA會生成類似于傳感器故障情況的模式。因此,冗余IMU的運動會影響圖3所示的圖案位置。這使得難以從運動傳感器模塊的輸出分類故障模式。另一方面,如圖4所示,改進的PCA不受移動運動冗余IMU的影響。由此,與傳統的PCA相比,改進的PCA更適合動態實時故障檢測。
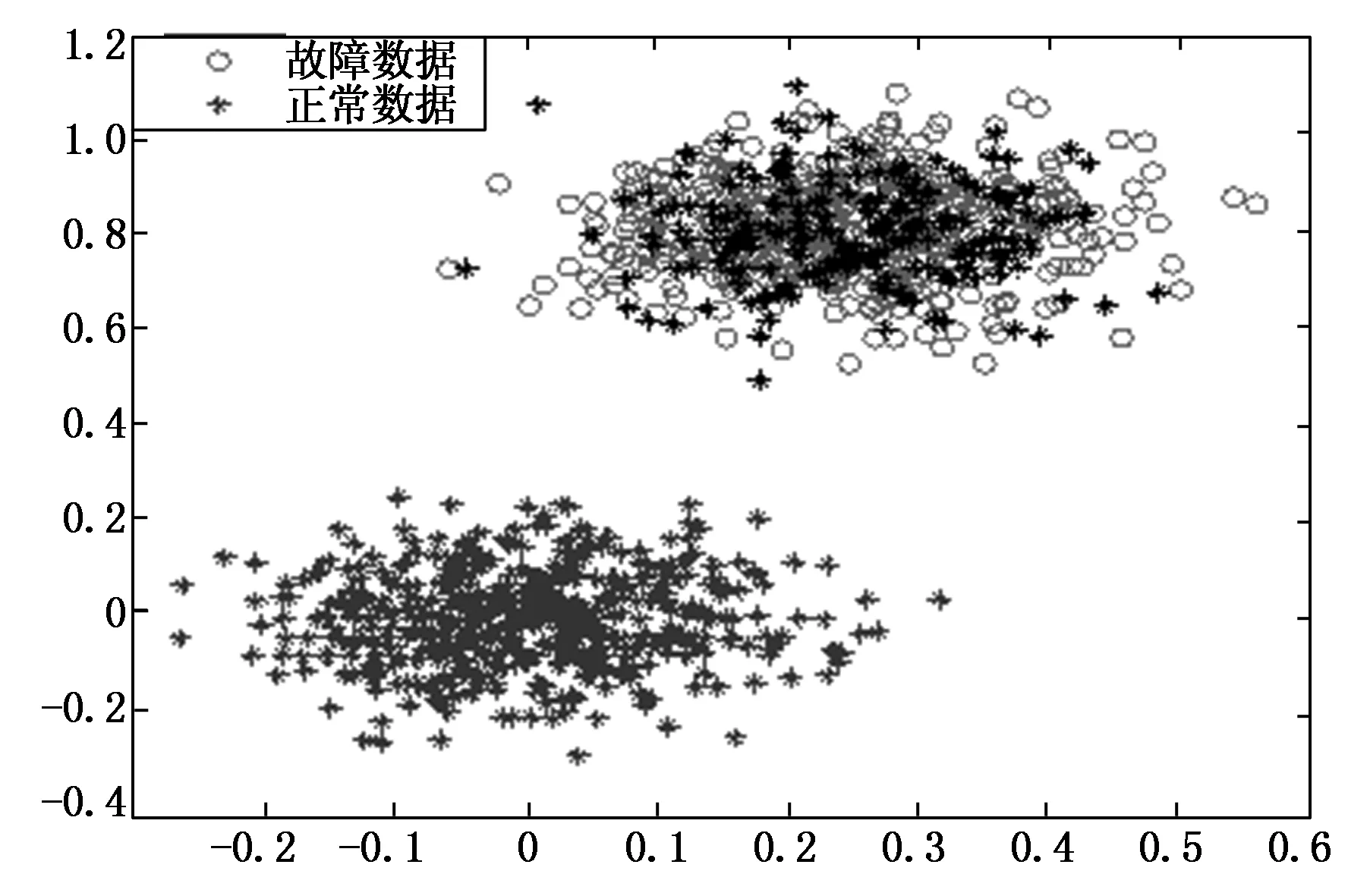
圖3 當傳感器模塊移動狀態時傳統的PCA檢測數據
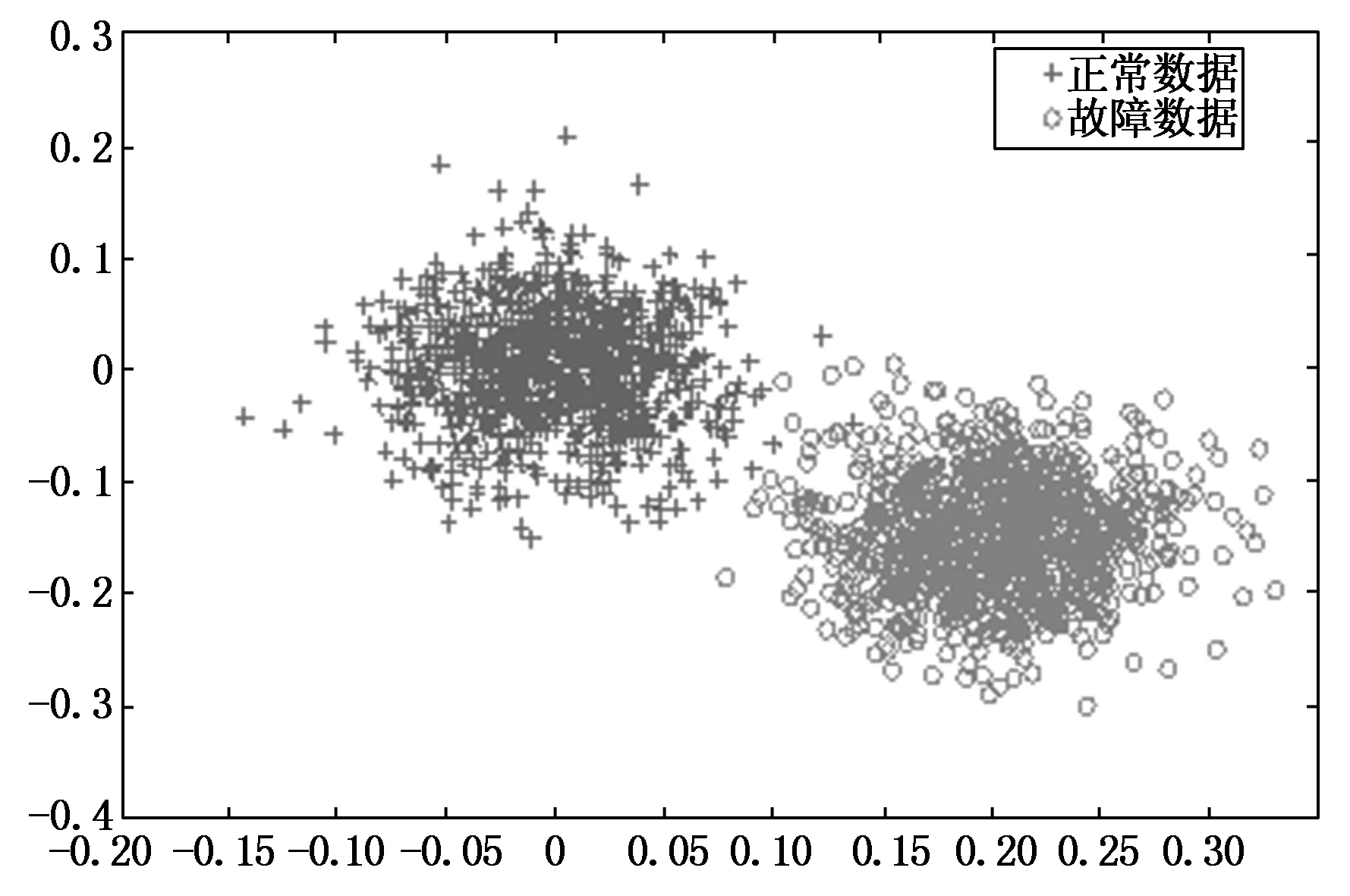
圖4 當傳感器模塊移動狀態時改進的PCA檢測數據
3.2 使用改進的PCA的故障檢測方案
傳感器故障檢測基于無故障預處理和實時生成的模式與修改的PCA之間的相似性測試。特征向量將在故障檢測過程之前計算。接下來會發生實時模式生成步驟。第三步是故障發生的判斷。因此,為了檢測故障,首先從傳感器模塊獲得沒有故障的傳感器數據,我們稱之為訓練集。該過程必須保證無故障的傳感器數據,因為混合傳感器數據的混合故障不能表示正常的傳感器模式。生成的訓練集用于將測量空間移動到奇偶校驗空間。此時,傳感器數據的6個維度由于具有矩陣V和傳感器數據的內積而減小到3維。可以使用奇偶空間中的訓練集數據來計算特征向量。使用計算的特征矢量,可以很容易地制作正常的傳感器圖案。
為了方便起見,這個模式的平均值轉化為特征平面上的(0,0),該特征平面由主要分量向量的坐標組成。這個過程被用于故障檢測,我們稱之為“預處理”過程。
在故障檢測的準備步驟中,計算特征向量W。對于在線故障檢測過程,我們計算從模式平均值到期望位置(0,0)的差異長度。如果差值|μy|大于閾值,則意味著冗余IMU有故障。相反,如果|μy|足夠小,我們可以認為冗余IMU運行正常。閾值可以由噪聲的大小來定義。此外,模式平均值計算有可能使用EM算法。EM算法是尋找模型最大似然解的有效方法。從計算模式的平均值可以知道該模式是否存在錯誤。
4 實驗分析
4.1 冗余IMU數據生成
在冗余IMU中,實現兩個正交IMU。因此,冗余IMU具有足夠數量的冗余組件。如果有一半冗余IMU傳感器可用,則可以計算和重新配置冗余IMU車身坐標輸出。每個傳感器連續運行。這意味著本文中使用的冗余IMU通過使用備用數據庫具有動態冗余。冗余IMU有它自己的配置,如圖5所示。它不僅影響每個傳感器坐標和身體軸之間的關系,而且影響故障檢測冗余IMU的性能。用于冗余IMU的陀螺儀和加速度計具有圓錐形安排。每個傳感器相對z軸傾斜54.74度,并配置為在x-y平面上具有相等的角度。錐形冗余IMU是的最佳配置。
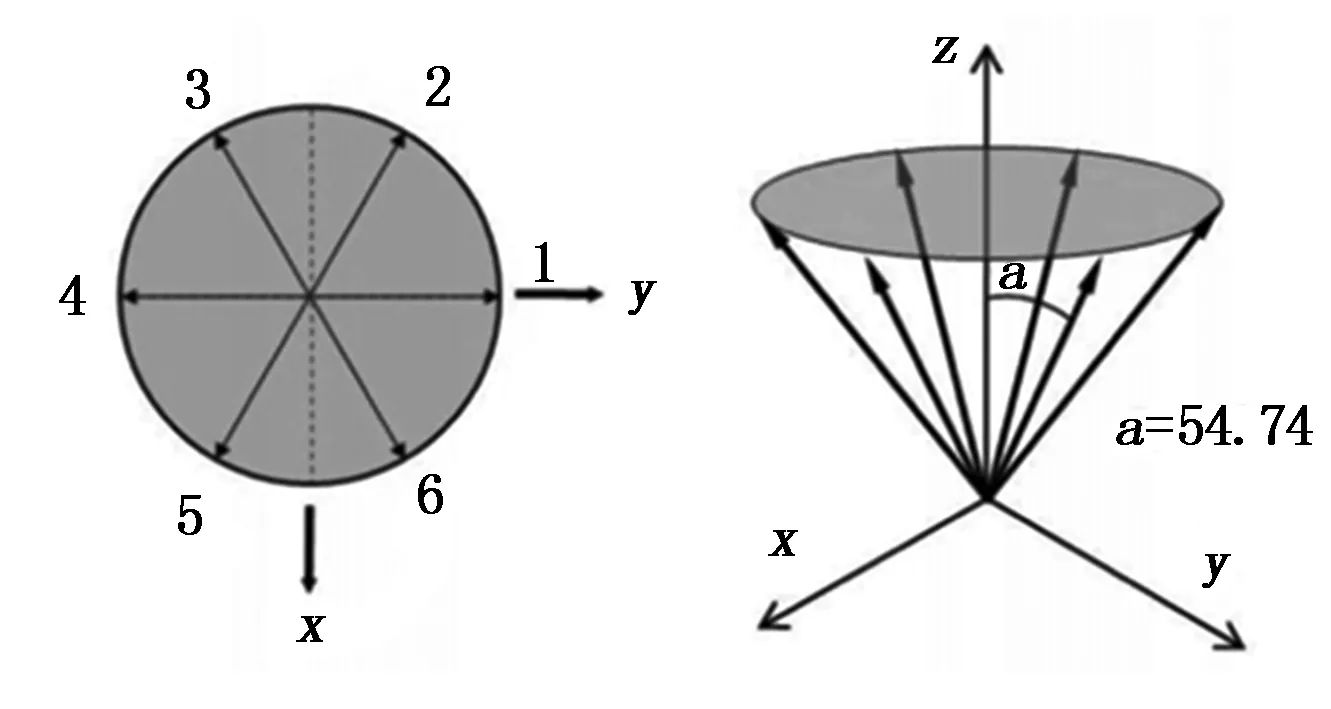
圖5 冗余IMU配置
本文中使用的冗余IMU由低等級MEMS慣性傳感器組成。對此的故障檢測算法幾乎相同,但它們并未用于衛星中的實際姿態控制系統。如式(16)所示,冗余IMU的誤差模型是通過考慮3個誤差因素,錯位誤差,偏差和比例因子來設計的。它們是MEMS等級傳感器的代表性誤差來源。未對準誤差是傳感器在預定義坐標上的未命中附加值。偏差和比例因子是為每個傳感器計算的值。等式(16)表示當使用兩個正交IMU時的冗余IMU信號模型。
m=MHx+b+ε
(16)
其中:m是每個陀螺儀傳感器和加速度計的測量值,M表示偏差校正矩陣,H是測量矩陣,它是傳感器和冗余IMU模塊之間的幾何關系,x表示冗余IMU輸出,b是偏差,并且ε是傳感器噪音。這里,M和b通過傳感器模塊的校準來計算,并且H在數學上被定義。使用測量方程(16),生成冗余IMU傳感器信號。傳感器輸出用于模擬中冗余IMU的陀螺儀測量。它每秒產生100個輸出。考慮添加故障,這與偏置組件類似。與故障大小相比,動態運動的大小是一個相對較大的組件。這個假設是由于證實了所提出的故障檢測方法可在動態環境中良好運行。
4.2 實驗仿真
如上所述生成在該模擬中使用的數據。冗余IMU的1 000個信號采樣被用作故障檢測過程的確定性輸入。測量噪聲方差用于實際傳感器輸出的實驗結果。如圖6所示,傳感器數據在1 s內包含車輛的動態運動。圖7顯示6 s時的第6個傳感器輸出混合故障,1 s時產生動態運動。
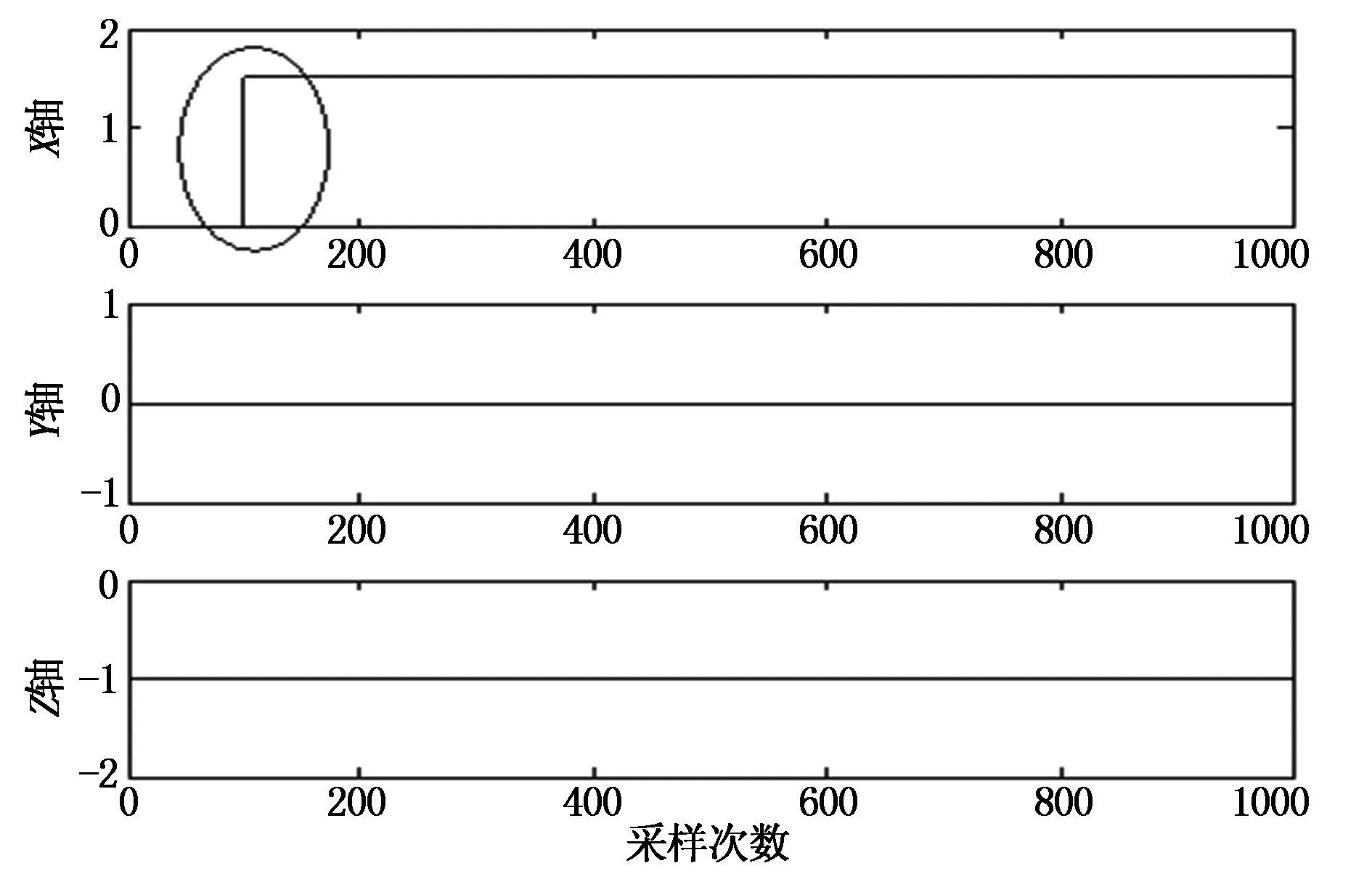
圖6 冗余IMU輸出
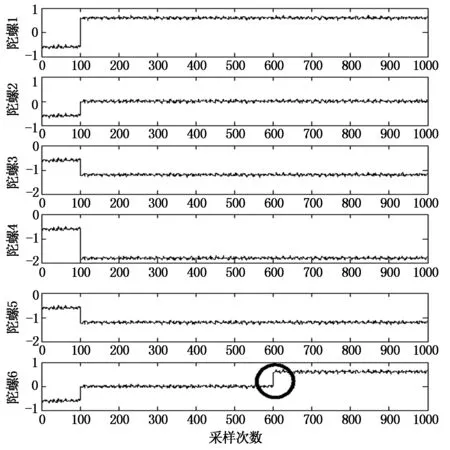
圖7 每個陀螺儀輸出
所提出的故障檢測算法的故障分類結果如圖8所示。每個小圓圈表示在每個時間步驟修改后的PCA的結果。如前面在圖3中所提到的,常規PCA不可能將移動運動和故障效應分類。而修改的PCA可以將它們分開,因為奇偶空間消除了由于動態運動造成的負面影響。這個特性幫助我們專注于故障模式檢測。修改后的PCA結果沒有變化,足以在1秒內判斷是故障模式。在6秒后,圖案移動到特征平面上的另一個位置。在預處理步驟中計算的特征向量不能表示傳感器輸出的故障。由于使用有保證的無故障傳感器數據,特征矢量僅代表正常的傳感器數據。傳感器輸出故障有一個主要成分,它代表故障,因為故障通常比測量噪聲大得多。因此,正常傳感器數據的定義主分量不再是主分量。所以生成模式的平均值被移動到某個位置。它為我們提供了檢測故障的證據。圖9為改進后PCA故障檢測結果。
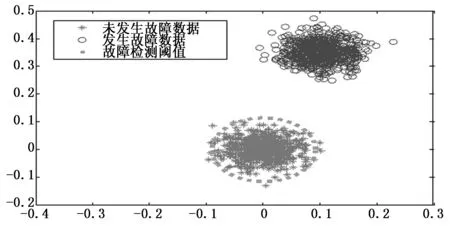
圖8 改進后PCA故障分類
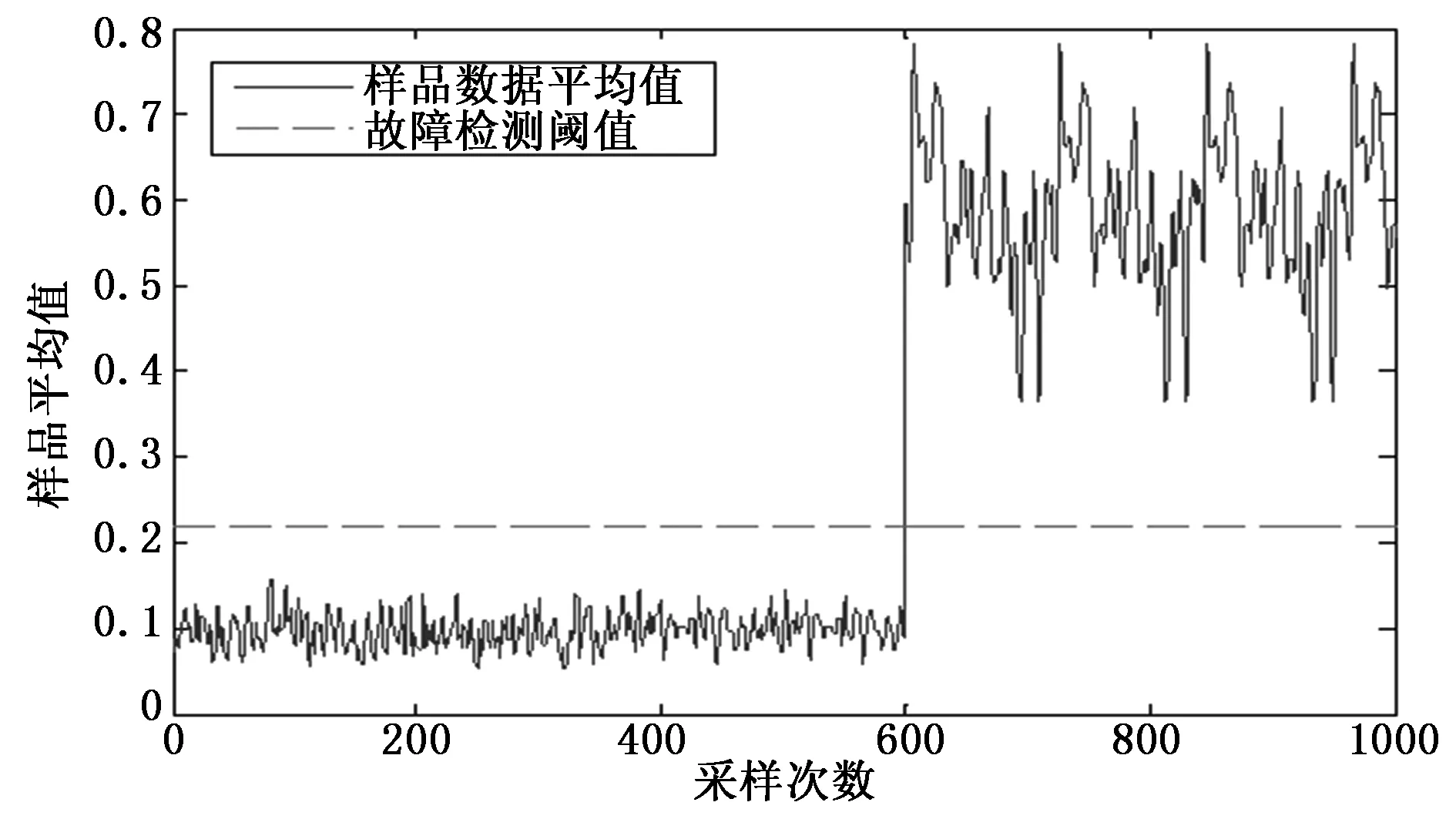
圖9 改進后PCA故障檢測結果
直到6秒,傳感器數據的模式均值位于(0.0)左右。它始終位于(0,0)的小變化邊界(閾值)內。正常傳感器模式均值的位置位于(0,0)。因此,我們可以將冗余IMU視為正常。相反,該模式意味著在運行6秒后左右移動(0.959,0.359 6)。該值足夠大,且它大于閾值,故可以認為故障發生。如果使用修改后的PCA進行故障檢測,故障會使模式發生變化。EM算法可以對每個模式的平均位置進行分類。虛線是迭代過程來計算模式的平均值。
5 結束語
本文針對傳統主成分分析法由于系統運動而導致慣性傳感器故障檢測中存在相當大誤差的不足,導致不可能用于車輛移動時慣性傳感器單元的故障檢測。為消除傳感器運動的這種負面影響,本文提出了改進的PCA,將PCA與奇偶空間法相結合,奇偶空間方法用來隔離動態變量的影響,來提高故障檢測性能。通過仿真實例,當冗余IMU的第6個陀螺儀有0.5°/s的附加故障時,雖然傳感器運動的大小大于故障,但本文改進PCA可以檢測故障模式。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
