基于PHM的高速鐵路牽引電機(jī)滾動(dòng)軸承健康狀態(tài)預(yù)測
2020-07-30 09:34:36牛齊明張奕黃
鐵道學(xué)報(bào) 2020年7期
關(guān)鍵詞:振動(dòng)
牛齊明,劉 峰,張奕黃
(1. 北京交通大學(xué) 計(jì)算機(jī)與信息技術(shù)學(xué)院, 北京 100044; 2. 河北大學(xué) 計(jì)算機(jī)教學(xué)部, 河北 保定 071002; 3. 北京交通大學(xué) 電氣工程學(xué)院, 北京 100044)
采用PHM技術(shù)對高速鐵路(以下簡稱“高鐵”)裝備展開健康狀態(tài)預(yù)測,可以改進(jìn)目前高鐵的維修和管理體制,還能輔助設(shè)備安全可靠地運(yùn)行。在裝備的健康狀態(tài)預(yù)測中,從原始傳感器的監(jiān)測數(shù)據(jù)中提取特征并進(jìn)行合理的轉(zhuǎn)換,建立高鐵裝備健康指標(biāo),然后通過相關(guān)的模型進(jìn)行預(yù)測。由得出的健康指標(biāo)值,管理人員可以判斷裝備的健康狀態(tài)變化趨勢,或者所處全壽命某個(gè)階段,從而進(jìn)行合理地設(shè)備管理和維修。準(zhǔn)確地預(yù)測是PHM健康管理的基礎(chǔ)和前提,應(yīng)該對其進(jìn)行深入的研究[1-2]。
描述裝備健康狀態(tài)的關(guān)鍵之一是其健康特征的合理選取。為了全面反映裝備的狀態(tài),許多研究中提取的特征都是高維的,這使得后續(xù)計(jì)算量增大,計(jì)算效率不高[3-5]。如郭亮等[5]從軸承振動(dòng)信號中抽取了19個(gè)特征,為提高計(jì)算效率需要用降維方法進(jìn)行數(shù)據(jù)處理。由于高鐵裝備的許多特征是非線性的,PCA和線性判別法等線性降維方法對數(shù)據(jù)的處理效果不好,因此采用非線性降維方法更合理。非線性降維方法有多維尺度法、等距映射法、馬氏距離累積法和自編碼器等。多維尺度法是將多維數(shù)據(jù)簡化到低維數(shù)據(jù),并使得由降維所引起的任何變形最小的數(shù)據(jù)分析方法。等距映射法是使用測地距離代替歐幾里德距離,并進(jìn)行多維尺度計(jì)算。馬氏距離累積法[6]是先進(jìn)行馬氏距離計(jì)算,然后對馬氏距離特征值進(jìn)行累加操作。自編碼器能從無標(biāo)簽的大數(shù)據(jù)中自動(dòng)學(xué)習(xí),進(jìn)行維數(shù)約簡[7-10]或得到在數(shù)據(jù)中的有效特征[11-13]。
另一方面,如果模型選取不合理還會(huì)造成預(yù)測精度的降低。本文選取支持向量機(jī)[14]和最小二乘支持向量機(jī)[15]作為健康狀態(tài)預(yù)測的對比模型。首先,基于高鐵牽引電機(jī)滾動(dòng)軸承健康狀態(tài)的時(shí)間屬性,構(gòu)建了輸入數(shù)據(jù)和輸出數(shù)據(jù)的時(shí)間滯后關(guān)系;進(jìn)而,用時(shí)滯支持向量機(jī)模型和時(shí)滯最小二乘支持向量機(jī)模型,建立深度堆疊去噪自編碼累積健康指標(biāo)和馬氏距離累積指標(biāo),進(jìn)行在線健康狀態(tài)的連續(xù)預(yù)測;通過對平均絕對誤差、均方根誤差和皮爾遜相關(guān)系數(shù)3個(gè)預(yù)測指標(biāo)的分析,可知DSDAE和TDLSSVM方案在高鐵滾動(dòng)軸承健康狀態(tài)預(yù)測的優(yōu)越性。
1 健康狀態(tài)預(yù)測模型
1.1 振動(dòng)數(shù)據(jù)的特征提取
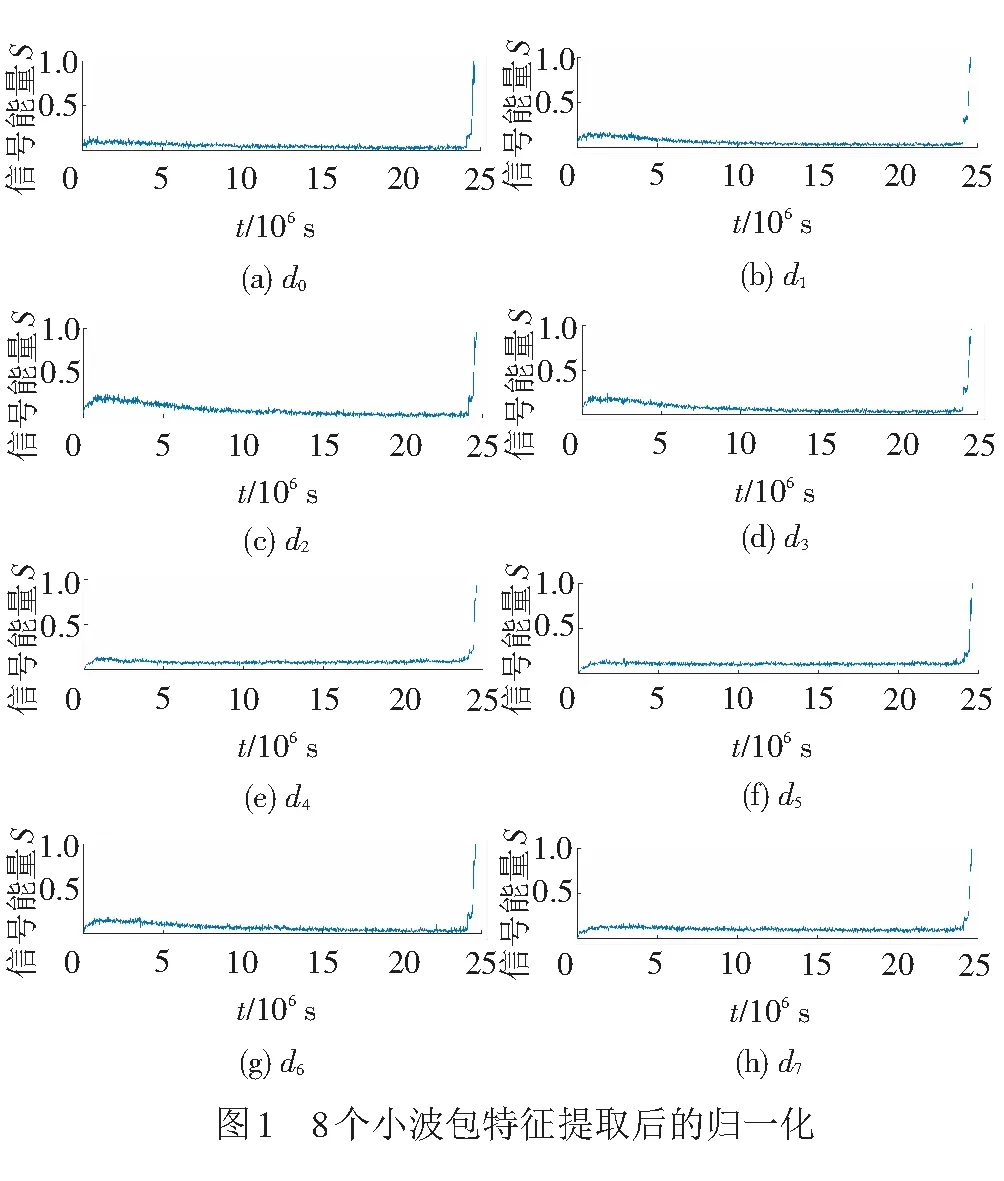
隨著高鐵牽引電機(jī)滾動(dòng)軸承的使用,振動(dòng)信號的頻率會(huì)有所變化,這時(shí)僅靠時(shí)域特征分析,難以判斷其頻率的詳細(xì)構(gòu)成。小波包是時(shí)頻特征提取的一種常用方法[16-17]。通過小波包分析和后期處理,能得到振動(dòng)信號在不同頻域上的能量分布圖。小波包的優(yōu)點(diǎn)是,能夠更精細(xì)地對信號進(jìn)行分析,尤其能對高頻部分進(jìn)行準(zhǔn)確分析,并且能自適應(yīng)選擇與振動(dòng)信號頻譜相匹配的頻帶[18]。
為優(yōu)化后續(xù)預(yù)測模型的預(yù)測結(jié)果
( 1 )
式中:y為歸一化后的數(shù)值;ymax為歸一化后的最大值;ymin為歸一化后的最小值;xmax為小波包變換后能量特征值中的最大值;xmin為小波包變換后能量特征值中的最小值;x為小波包變換后的能量特征值。
用式( 1 )對8個(gè)小波包特征進(jìn)行了歸一化[6],見圖1。
1.2 自編碼器累積法
自編碼器是學(xué)習(xí)輸入數(shù)據(jù)表示的一種人工神經(jīng)網(wǎng)絡(luò),它可以作為降維的一種方法來使用。自編碼器可以通過訓(xùn)練網(wǎng)絡(luò)來減小信號中的噪聲。在神經(jīng)結(jié)構(gòu)上,自編碼器是一種前饋神經(jīng)網(wǎng)絡(luò),它包含輸入層、隱藏層和輸出層。從輸入層到隱藏層的變換稱為編碼,從隱藏層到輸出層的變換稱為解碼。這兩個(gè)變換可以分別定義為兩種映射φ、φ。對于單層的自編碼器,兩種映射分別為
( 2 )
式中:x為輸入;c為編碼的輸出;σ1為編碼的激活函數(shù);W1為編碼的權(quán)重;b1為編碼的偏置;y為解碼的輸出;σ2為解碼的激活函數(shù);W2為解碼的權(quán)重;b2為解碼的偏置。
由于輸入數(shù)據(jù)沒有標(biāo)簽信息,可知自編碼器是一種無監(jiān)督學(xué)習(xí)的方法。自編碼器的參數(shù)通過某種方法如隨機(jī)梯度下降法來最小化設(shè)定的損失函數(shù)
L(x,y)=‖x-y‖2
( 3 )
將自編碼器擴(kuò)展就會(huì)得到深度自編碼器。深度自編碼器與自編碼器不同之處在于隱層的數(shù)目上,深度自編碼器有更多的隱層,通過增加隱層數(shù)目避免了傳統(tǒng)神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)容易陷入局部極小值的問題。深度堆疊去噪自編碼器是對輸入信號加入噪聲,再送入自編碼器中使其盡量重建一個(gè)與未加噪聲輸入相同的輸出,這種方法可以學(xué)到一個(gè)更魯棒性的特征表示。
累積法是Page[19]提出的一種控制圖模型。累積法用不斷累積待測值與標(biāo)準(zhǔn)值的差值,實(shí)現(xiàn)放大數(shù)據(jù)變化的目的。因此用累積法能夠更加敏感地檢驗(yàn)微小的變化。對振動(dòng)數(shù)據(jù)用深度堆疊去噪自編碼器的編碼輸出值進(jìn)行累積,通過累積序列值來表示高鐵裝備健康狀態(tài)的退化情況。為優(yōu)化后面預(yù)測模型的計(jì)算,對累積序列值進(jìn)行歸一化,得到深度堆疊去噪自編碼器累積健康指標(biāo)。這個(gè)指標(biāo)值越大表示裝備的健康狀態(tài)越差,當(dāng)指標(biāo)達(dá)到1時(shí)表示裝備完全損壞。
1.3 時(shí)滯最小二乘支持向量機(jī)
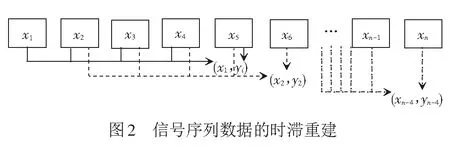
為了能夠進(jìn)行連續(xù)預(yù)測,需要重構(gòu)一種時(shí)間滯后關(guān)系。假設(shè)信號序列是{x1,x2,…,xn},用大小為m的窗口重建序列,可以得到多維時(shí)間滯后矩陣X和預(yù)測向量Y分別為
( 4 )
( 5 )

最小二乘支持向量機(jī)(LSSVM)是SVM的一種改進(jìn)方法。LSSVM用等式約束代替了SVM中的不等式約束,方便了Lagrange乘子α的求解,并把誤差平方和損失函數(shù)作為目標(biāo)函數(shù)。這樣通過求解線性方程組問題,提高了求解速度,降低了求解難度。時(shí)滯最小二乘支持向量機(jī)是具有輸入時(shí)滯數(shù)據(jù)和輸出預(yù)測循環(huán)映射關(guān)系的最小二乘支持向量機(jī)。輸入時(shí)滯數(shù)據(jù)集可以表示為X={xi,i=1,2,…,∞}。最小二乘支持向量機(jī)模型可以描述為
yk=wTφ(xk)+b+ekk=1,…,N
( 6 )
式中:J為損失函數(shù);w為權(quán)值系數(shù)向量;γ為可以調(diào)節(jié)的懲罰系數(shù);k為權(quán)向量;ek為誤差變量;φ(·)為映射函數(shù);b為偏置。
用Lagrange乘數(shù)法可得
L(w,b,e,α)=J(w,e)-
( 7 )
根據(jù)KKT條件對式( 7 )求偏導(dǎo),可得
( 8 )
定義核函數(shù)k(xk,yk)=φT(xk)φ(yk),從式( 8 )中消去ek和w后化簡,可得
( 9 )
式中:In為化簡后的n階單位矩陣。
從式( 9 )中解得α和b,得到LSSVM模型為
(10)
式中:xk為多維輸入;f為一維輸出。在最小二乘支持向量機(jī)模型中,xk對應(yīng)時(shí)滯最小二乘支持向量機(jī)模型時(shí)滯數(shù)據(jù)集中的xi。
2 健康狀態(tài)預(yù)測流程
基于DSDAE和TDLSSVM的高鐵牽引電機(jī)滾動(dòng)軸承健康狀態(tài)預(yù)測的流程見圖3。
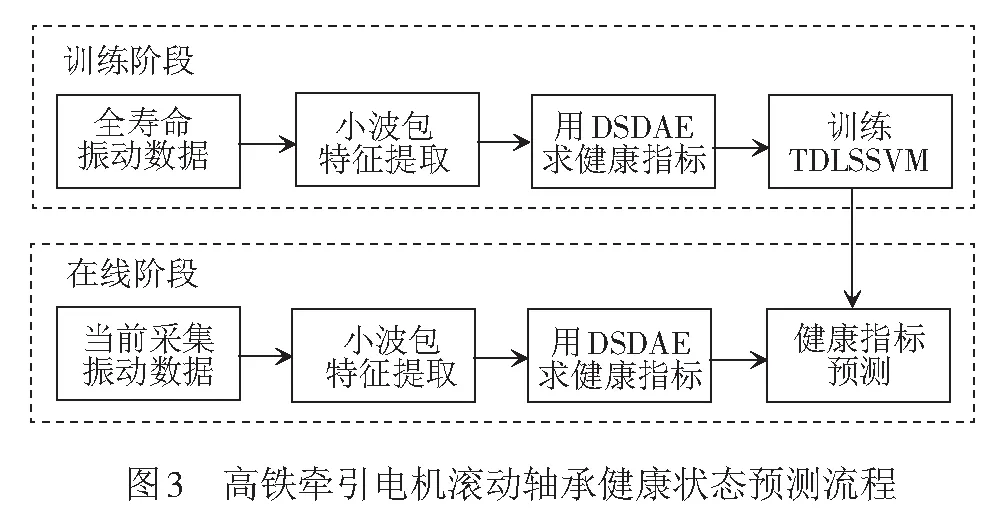
(1) 訓(xùn)練階段:① 獲取高鐵牽引電機(jī)滾動(dòng)軸承全壽命振動(dòng)數(shù)據(jù),并通過三層小波包分解進(jìn)行特征提取;② 應(yīng)用DSDAE求健康指標(biāo),獲取牽引電機(jī)滾動(dòng)軸承健康指標(biāo);③ 訓(xùn)練TDLSSVM模型。
(2) 在線階段:①獲取準(zhǔn)實(shí)時(shí)振動(dòng)數(shù)據(jù),用三層小波包進(jìn)行特征提取;②應(yīng)用DSDAE獲取牽引電機(jī)滾動(dòng)軸承當(dāng)前健康指標(biāo);③把當(dāng)前健康指標(biāo)輸入到訓(xùn)練好的TDLSSVM模型,得到健康指標(biāo)的預(yù)測值。
3 實(shí)驗(yàn)和分析
利用美國西儲(chǔ)大學(xué)PRONOSTIA[20]和基于北京交通大學(xué)軸承實(shí)驗(yàn)臺的工業(yè)數(shù)據(jù)集進(jìn)行實(shí)驗(yàn)。數(shù)據(jù)由兩個(gè)實(shí)驗(yàn)臺傳感器獲得,軸承試驗(yàn)臺見圖4。
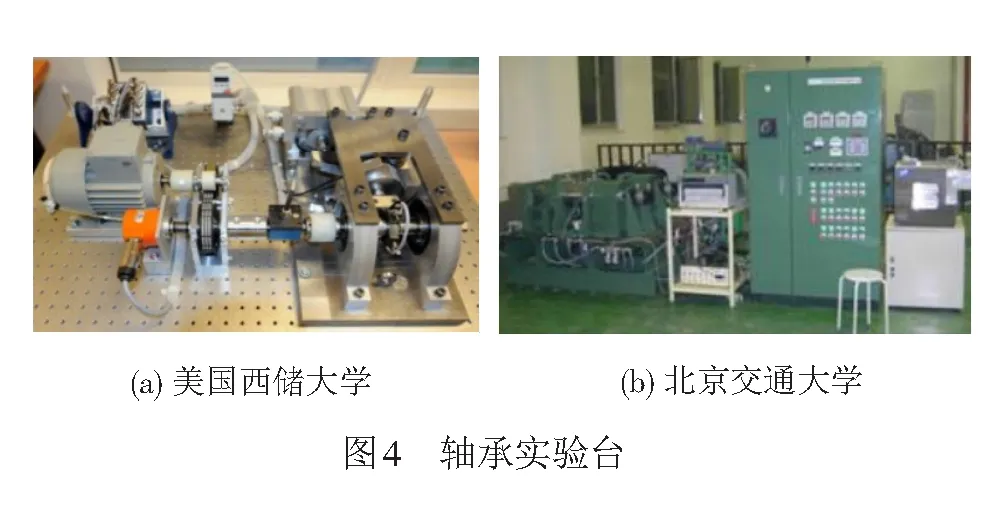
PRONOSTIA實(shí)驗(yàn)臺外觀見圖4(a),可用來測試和驗(yàn)證軸承故障檢測、故障診斷和故障預(yù)測方法。它由加載、旋轉(zhuǎn)和測量三部分組成。平臺提供了真實(shí)的球軸承全周期使用壽命振動(dòng)和溫度實(shí)驗(yàn)數(shù)據(jù)。從PRONOSTIA實(shí)驗(yàn)臺相關(guān)傳感器獲得的振動(dòng)和溫度信號,分別保存在ASCⅡ文件中。振動(dòng)信號由水平振動(dòng)信號和垂直振動(dòng)信號組成。采樣頻率為25.6 kHz。每10 s采集一次數(shù)據(jù),每次采集的時(shí)長為0.1 s,則可得到含有2 560個(gè)樣本的一個(gè)記錄。每個(gè)記錄都存儲(chǔ)在一個(gè)ASCⅡ文件中。對于每個(gè)ASCⅡ文件,振動(dòng)傳感器獲得的數(shù)據(jù)包括水平方向振動(dòng)數(shù)據(jù)和垂直方向振動(dòng)數(shù)據(jù)。此外,相應(yīng)的振動(dòng)時(shí)間也存儲(chǔ)在ASCⅡ文件中。
北京交通大學(xué)高速牽引電機(jī)軸承試驗(yàn)臺NTN又稱實(shí)驗(yàn)臺,其外觀見圖4(b)。按照功能可以劃分為基座部分、軸承部分、驅(qū)動(dòng)部分、控制部分、輔助部分和監(jiān)測部分,各部分功能簡述如下。
基座部分主要由本體和各機(jī)械部件所構(gòu)成,基座上有電機(jī)、軸承和油系統(tǒng)等。軸承部分由軸承套筒和內(nèi)部用于固定軸承的部件組成,用于安裝被試驗(yàn)軸承。驅(qū)動(dòng)部分由電機(jī)和相應(yīng)的傳動(dòng)機(jī)構(gòu)構(gòu)成,用來提供滾動(dòng)軸承旋轉(zhuǎn)的轉(zhuǎn)速和轉(zhuǎn)矩。控制部分由操作盤、控制電磁閥、傳感器等組成,這些部件放在一個(gè)控制柜中,用于試驗(yàn)過程中對系統(tǒng)的控制和監(jiān)測等。輔助部分由供油系統(tǒng)、冷卻系統(tǒng)和除霧機(jī)等輔助部件構(gòu)成。檢測部分由數(shù)據(jù)記錄儀、振動(dòng)分析儀、工控機(jī)和相應(yīng)的傳感器構(gòu)成,可用于軸承振動(dòng)、溫度等數(shù)據(jù)的采集和分析。所有采集的振動(dòng)數(shù)據(jù)都存儲(chǔ)在數(shù)據(jù)庫文件中。這是具有世界先進(jìn)水平、目前國內(nèi)唯一用于高鐵的高速牽引電機(jī)軸承實(shí)驗(yàn)臺,可以做高速動(dòng)車組牽引電機(jī)軸承試驗(yàn)。根據(jù)實(shí)際使用狀況,進(jìn)行不同轉(zhuǎn)速、軸向和徑向載荷、溫度、潤滑油脂等綜合條件下的試驗(yàn),包括急加速試驗(yàn)、溫升特性試驗(yàn)和耐久性試驗(yàn),為高速電動(dòng)車組的安全運(yùn)營速度提供基礎(chǔ)實(shí)驗(yàn)數(shù)據(jù)。
驗(yàn)證用的數(shù)據(jù)集來自PRONOSTIA球軸承的垂直振動(dòng)流數(shù)據(jù)和工業(yè)球軸承垂直振動(dòng)流數(shù)據(jù)。球軸承1~5在PRONOSTIA實(shí)驗(yàn)床上運(yùn)行6 h 50 min,共采集了2 463組數(shù)據(jù)。高速某型號列車中使用的滾動(dòng)軸承是6311型的球軸承。在實(shí)驗(yàn)臺上采用加速度傳感器對6311球軸承進(jìn)行了實(shí)驗(yàn),采集其運(yùn)行信息。采集設(shè)備的采樣數(shù)率為100 kHz。每600 s采集一次數(shù)據(jù),每次采集的時(shí)長為0.1 s,則可得到含有10 000個(gè)樣本的一個(gè)記錄。實(shí)驗(yàn)軸承運(yùn)行時(shí)間累計(jì)在實(shí)驗(yàn)臺上6 144 h40 min,共采集36 868組數(shù)據(jù)。
小波包分解最重要的是基小波的選取,目前常用的小波基有db系列小波、mexh小波和coif小波等。本文實(shí)驗(yàn)中根據(jù)誤差最小化原則,選擇哈爾小波進(jìn)行3層分解來提取數(shù)據(jù)特征。
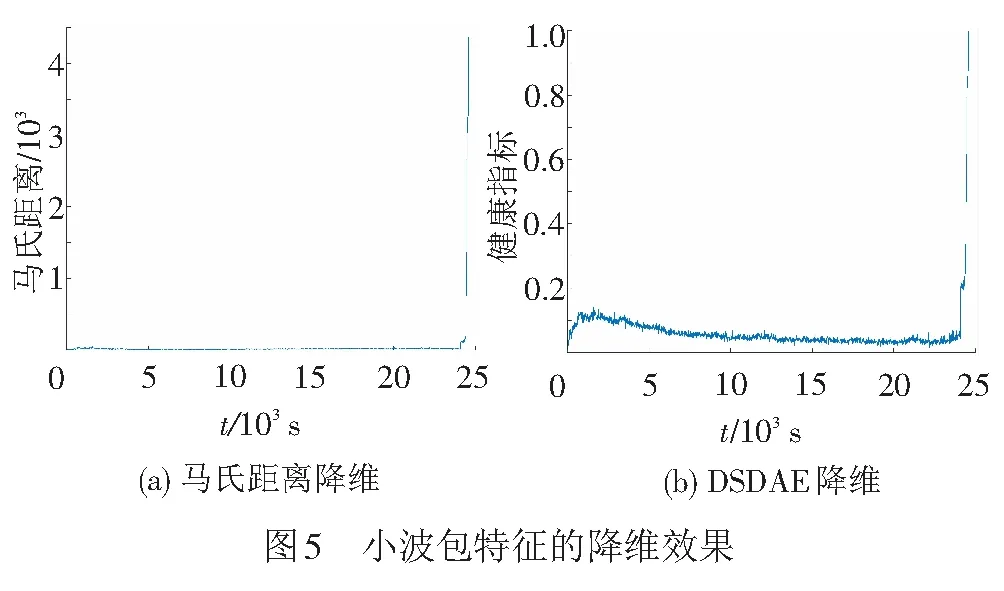
由于所得特征維度較高不便于后面的預(yù)測處理,因此用馬氏距離和深度堆疊去噪自編碼方法對高維特征進(jìn)行降維。深度堆疊去噪自編碼器的隱藏層數(shù)是4層,各層的神經(jīng)元數(shù)目分別是25、7、2、1個(gè)。PRONOSTIA球軸承降維效果見圖5。由圖5可見,降維后數(shù)據(jù)波動(dòng)大且趨勢不明顯。
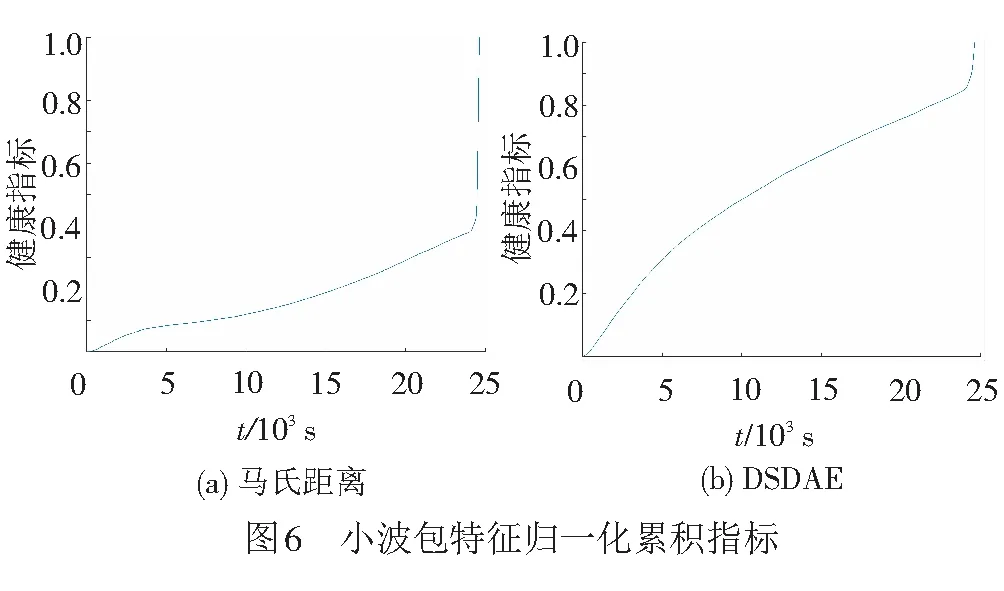
為了解決這些問題,對圖5的數(shù)據(jù)使用歸一化和累積法可得到圖6。由圖6可見,可以看到消除了波動(dòng)且呈現(xiàn)單調(diào)增趨勢。
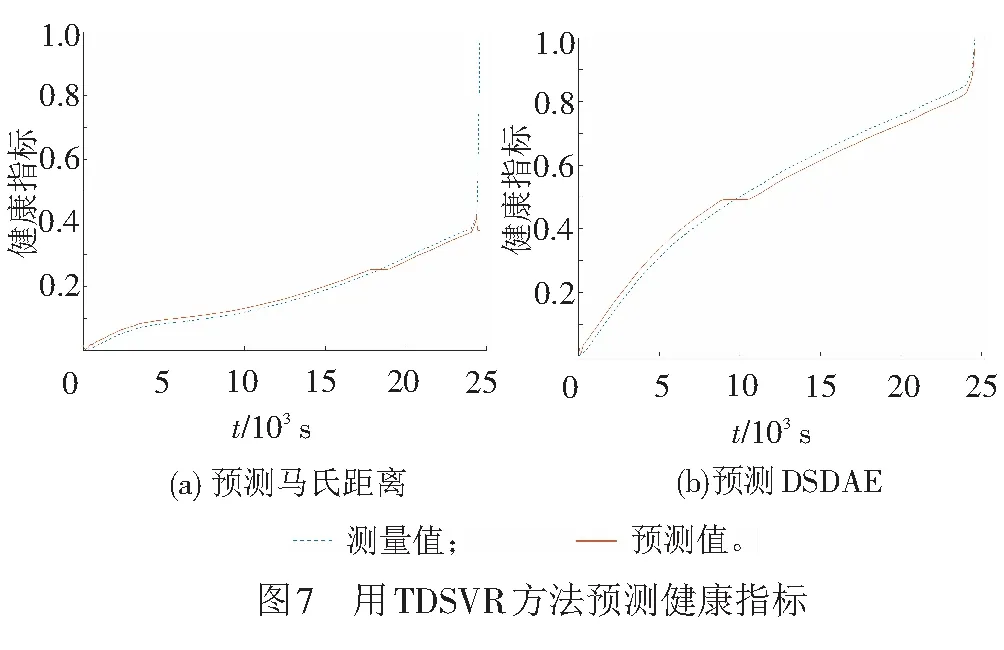
為了說明實(shí)驗(yàn)效果,進(jìn)行了4組實(shí)驗(yàn)。窗口大小采用平均互信息法來選取。采用留一法劃分訓(xùn)練集和測試集。用80%的樣本作為訓(xùn)練集,20%的樣本作為測試集。前兩組實(shí)驗(yàn)是用TDSVR方法預(yù)測馬氏距離累積指標(biāo)和DSDAE累積指標(biāo)。預(yù)測結(jié)果對比見圖7。由圖7可見,測量值和預(yù)測值的誤差比較大,尤其在最后的預(yù)測部分預(yù)測趨勢有誤。
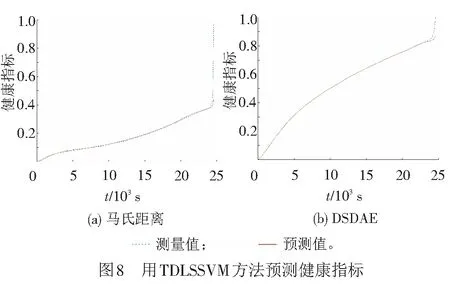
后兩組實(shí)驗(yàn)是用TDLSSVM方法預(yù)測馬氏距離累積指標(biāo)和DSDAE累積指標(biāo)。預(yù)測結(jié)果對比見圖8。由圖8可見,測量值和預(yù)測值的誤差比較小,均比圖7兩個(gè)子圖誤差也小,而且在最后的預(yù)測部分預(yù)測趨勢一致。
為了對DSDAE+TDSVR、MDCUSUM+TDSVR、DSDAE+TDLSSVM、MDCUSUM+TDLSSVM這4種方案預(yù)測效果進(jìn)行量化對比,使用了均值絕對誤差MAE、均方根誤差RMSE和皮爾遜相關(guān)系數(shù)R這3個(gè)指標(biāo)。
均值絕對誤差MAE是絕對誤差的平均值,反映預(yù)測值誤差的實(shí)際情況。
(11)

均方根誤差RMSE是預(yù)測值與觀測值偏差的平方和與預(yù)測次數(shù)比值的平方根,反映預(yù)測值與觀測值之間的偏差。
(12)
較小的RMSE值意味著預(yù)測值和觀測值之間的誤差變化較小,RMSE反映了預(yù)測值偏離觀測值的程度。
皮爾遜相關(guān)系數(shù)兩組數(shù)據(jù)之間線性相關(guān)的程度為
(13)

R值介于-1和1之間,R= -1時(shí),兩個(gè)變量為完全負(fù)相關(guān);R=0時(shí),兩個(gè)變量為線性無關(guān);R=1時(shí),兩個(gè)變量為完全正相關(guān)。總之,相關(guān)系數(shù)的絕對值越大,相關(guān)性越強(qiáng);相關(guān)系數(shù)越接近于0,相關(guān)度越弱。
模型方面,LSSVM的核函數(shù)采用高斯徑向基核函數(shù)。利用留一交叉驗(yàn)證法對LSSVM預(yù)測模型進(jìn)行了優(yōu)化,確定最優(yōu)模型參數(shù)。測量值和預(yù)測值的計(jì)算匯總結(jié)果見表1。對比相關(guān)數(shù)據(jù)發(fā)現(xiàn)DSDAE+TDLSSVM方案效果最好。其中DSDAE+TDLSSVM方案的MAE指標(biāo)是0.002 2,RMSE指標(biāo)是0.006 9,R為0.999 6。
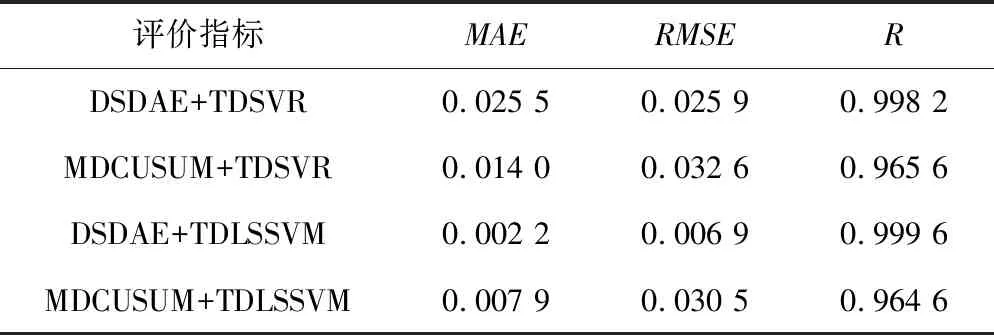
表1 各種方案的總體多指標(biāo)評分
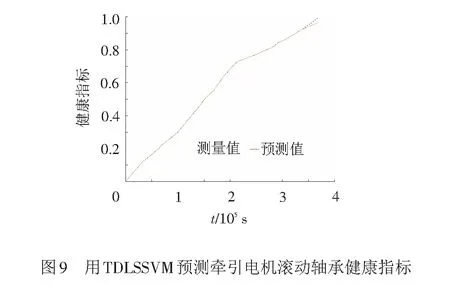
合作實(shí)驗(yàn)室高速牽引電機(jī)軸承實(shí)驗(yàn)臺6311軸承全壽命數(shù)據(jù)的深度堆疊去噪自編碼累積歸一化健康指標(biāo)和用TDLSSVM預(yù)測健康指標(biāo)的對比見圖9。由于數(shù)據(jù)比較多,前期的預(yù)測值和測量值看上去都重疊在一起,實(shí)際兩者數(shù)值有一定的誤差。
高速牽引電機(jī)滾動(dòng)軸承數(shù)據(jù)集的計(jì)算結(jié)果見表2。由表2可知,所提方法的泛化能力較強(qiáng),可以有效地解決高鐵裝備相關(guān)的健康狀態(tài)預(yù)測問題。

表2 DSDAE+TDLSSVM方案的總體多指標(biāo)評分
4 結(jié)論
(1) 本文采用基于深度堆疊去噪自編碼器累積和時(shí)滯最小二乘支持向量機(jī)的滾動(dòng)軸承壽命預(yù)測方案,與其他方案相比更能準(zhǔn)確預(yù)測基于振動(dòng)信號的高速牽引電機(jī)滾動(dòng)軸承的剩余使用壽命。
(2) 通過在公開數(shù)據(jù)集PRONOSTIA和自有高速牽引電機(jī)滾動(dòng)軸承數(shù)據(jù)集上的實(shí)驗(yàn), 結(jié)果表明所提方案對滾動(dòng)軸承壽命預(yù)測有一定的指導(dǎo)意義。
(3) 本文所提方案除了能有效地預(yù)測高鐵牽引電機(jī)滾動(dòng)軸承的剩余使用壽命, 還可以應(yīng)用于高鐵其它裝備剩余使用壽命的預(yù)測。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
大電機(jī)技術(shù)(2022年5期)2022-11-17 08:12:48
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(bào)(2018年4期)2018-09-14 03:40:58
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:44
計(jì)算物理(2014年2期)2014-03-11 17:01:44
鄭州大學(xué)學(xué)報(bào)(理學(xué)版)(2014年3期)2014-03-01 04:21:00
