基于區(qū)域分割的大靶面單目視覺測量技術(shù)
2020-05-18 02:52:02馬曉東張吉旋
兵器裝備工程學(xué)報(bào) 2020年4期
張 杰,馬曉東,張吉旋
(中國飛行試驗(yàn)研究院, 西安 710089)
根據(jù)系統(tǒng)中使用的視覺傳感器(測量攝像機(jī))的數(shù)量,傳統(tǒng)的光學(xué)測量可以簡單地分為單目視覺測量、雙目視覺測量以及多目視覺測量[1]。為提高測量精度,增加空間約束關(guān)系,一般采用雙目視覺測量為主,通過目標(biāo)在兩個(gè)攝像機(jī)上的成像關(guān)系計(jì)算其空間坐標(biāo)。單目視覺測量是指采用一臺視覺傳感器獲取被測目標(biāo)空間位置關(guān)系,其系統(tǒng)簡單、成本低、易實(shí)現(xiàn),在二維位置測量或準(zhǔn)三維位置測量中使用較多。根據(jù)CCD攝像機(jī)的特點(diǎn),在進(jìn)行攝影測量時(shí),應(yīng)盡量使CCD成像面與被測量平面平行,但在實(shí)際的應(yīng)用中,物象平行是很難達(dá)到的。
單目視覺用于二維位置測量時(shí),因?yàn)閿z像機(jī)中心位置靠近光學(xué)中心,成像畸變小、標(biāo)定精度高,可以在小目標(biāo)測量中獲取較高的靶面測量精度[2]。在大目標(biāo)平面位置測量中,光學(xué)系統(tǒng)覆蓋面積大,圖像邊緣嚴(yán)重畸變。因此,如何提高大視場相機(jī)在單目視覺測量中的標(biāo)定精度和測量精度一直是單目視覺研究的熱點(diǎn)和難點(diǎn)。
大視場單目視覺測量系統(tǒng)構(gòu)建中需要大型高精度2D或3D靶標(biāo)進(jìn)行標(biāo)定與數(shù)據(jù)分析。這種高精度靶標(biāo)對精度控制、安裝使用以及后期的維護(hù)有很高的要求,需要耗費(fèi)較多的人工成本。所以,探索一種新的大靶面視場的標(biāo)定方法顯得尤為重要。本研究根據(jù)攝影測量原理,在完成攝像機(jī)標(biāo)定的基礎(chǔ)上,對大靶面進(jìn)行分割,將分割的小平面與標(biāo)定結(jié)果相對應(yīng),實(shí)現(xiàn)了平面內(nèi)物體的位置的測量。
1 攝像機(jī)的標(biāo)定
攝像機(jī)的標(biāo)定是視覺測量系統(tǒng)的重要組成部分。傳統(tǒng)的標(biāo)定方法所產(chǎn)生的誤差,會(huì)隨著視場的增大而增大。通過建立大靶面視場模型,并對攝像機(jī)的畸變特性以及待測參數(shù)在視場內(nèi)不同區(qū)域的變化特點(diǎn)進(jìn)行分析。在進(jìn)行攝像機(jī)畸變參數(shù)標(biāo)定的基礎(chǔ)上將大靶面拆分為很多小的靶面,利用透視變換模型對拆分的小靶面逐個(gè)標(biāo)定,根據(jù)幾何對應(yīng)關(guān)系把標(biāo)定好的小靶面組合起來從而實(shí)現(xiàn)對攝像機(jī)大視場的標(biāo)定[4]。
對平面中任意一點(diǎn)坐標(biāo)進(jìn)行計(jì)算時(shí),需要對攝像機(jī)進(jìn)行標(biāo)定圖像中任意一點(diǎn)畸變后的坐標(biāo)為(xd,yd),理想點(diǎn)與畸變點(diǎn)之間的關(guān)系為[5]:

(1)
式中:k為畸變系數(shù),采用張正友圖像標(biāo)定算法可以得到需要的畸變系數(shù)。
在視覺測量中,經(jīng)攝像機(jī)拍攝成像后,將三維目標(biāo)信息立體圖像以二維平面圖像進(jìn)行顯示,必定存在數(shù)據(jù)信息的丟失[6]。在實(shí)際測量中,假設(shè)圖像坐標(biāo)(ui,vi)和目標(biāo)平面上的原始坐標(biāo)(xwi,ywi,zwi)。兩者投影的不均勻?qū)?yīng)可以描述為[7-9]:
(2)
其中:Zc為該點(diǎn)深度信息即攝像機(jī)坐標(biāo)系下光軸所在坐標(biāo),f/dx、f/dy、u0、v0為攝像機(jī)內(nèi)參,R、T為相對位姿參數(shù),經(jīng)如圖1所示坐標(biāo)轉(zhuǎn)換,可得:
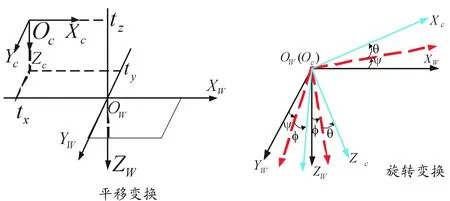
圖1 坐標(biāo)系變換
其中本文中選定點(diǎn)在同一靶面且滿足zwi=0,故式(2)可變換為:
(3)
將式(3)變換展開可得:
(4)
由式(4)可得:
zc=r31xwi+r32ywi+tz
(5)
將式(5)代入式(4),可得:
(6)
擴(kuò)充到n個(gè)點(diǎn),這些點(diǎn)像素坐標(biāo)及世界坐標(biāo)均已知,聯(lián)立式(6)并將其改寫為Ax=b的形式可得[10]:
(7)
當(dāng)n≥4,式(7)有唯一解,為[11]:
x=(ATA)-1ATb
(8)
根據(jù)以上公式推導(dǎo),在大靶面的標(biāo)定過程中通過獲取同一平面上的4個(gè)點(diǎn)(8個(gè)數(shù)據(jù)),根據(jù)式(8)計(jì)算可得到R、T相關(guān)位姿參數(shù)信息,完成單目視覺大靶面平面位置測量系統(tǒng)的標(biāo)定。
2 區(qū)域分割算法研究及實(shí)現(xiàn)
所謂圖像分割,主要指的是根據(jù)灰度、顏色、紋理和形狀等目標(biāo)圖像自身的特征,把圖像劃分成若干個(gè)互不交迭的區(qū)域,并使這些特征在同一區(qū)域內(nèi)呈現(xiàn)出相似性,而在不同區(qū)域間呈現(xiàn)出明顯的差異性。在本文的研究中,圖像分割的作用是將大視場的標(biāo)定問題轉(zhuǎn)化到多個(gè)小視場內(nèi)解決,這樣就避免了大視場光學(xué)成像系統(tǒng)成像邊緣畸變過大導(dǎo)致失真的問題。
2.1 現(xiàn)有區(qū)域分割算法
圖像分割算法常用的主要有3種,分別是基于閾值、邊緣和區(qū)域?qū)D像進(jìn)行相關(guān)處理。顧名思義,閾值法主要需要是按照某個(gè)準(zhǔn)則函數(shù)來求解最佳灰度閾值,根據(jù)圖像的灰度特征來將其分到合適的類別中。邊緣法則是根據(jù)邊緣線中的特征突變信息,具體實(shí)現(xiàn)可利用圖像與模板進(jìn)行卷積來完成。區(qū)域法中最常見的算法為分水嶺算法,是基于拓?fù)淅碚摰臄?shù)學(xué)形態(tài)學(xué)的分割方法進(jìn)行。
基于邊緣的區(qū)域分割算法中,傳統(tǒng)的canny算法[12]依舊是由邊緣檢測和連接邊緣形成邊界兩部分組成。首先對圖像進(jìn)行平滑,采用一維零均值高斯濾波器進(jìn)行卷積操作,其中濾波器函數(shù)為:
(9)
接下來需要從水平和垂直兩個(gè)方向,通過一階偏導(dǎo)的有限差分,采用2×2大小的模板,計(jì)算出圖像的梯度幅值和方向,計(jì)算公式如下:
(10)
最后通過設(shè)定高、低閾值,通過與閾值比較確定圖像的邊緣[13]。
經(jīng)過改進(jìn)的canny邊緣檢測分割算法中,對平滑過程中的濾波函數(shù)進(jìn)行引導(dǎo),代替原始的高斯濾波,或借鑒不同的邊緣檢測算子,對邊緣的梯度進(jìn)行改進(jìn)計(jì)算,以便能夠使邊緣定位更加準(zhǔn)確。同時(shí),閾值的選擇也十分重要,根據(jù)圖像自適應(yīng)選取,可以提高圖像的信噪比,對后期進(jìn)一步進(jìn)行圖像處理有很大的促進(jìn)作用。
2.2 線掃描激光器區(qū)域分割
在本文的研究中,線掃描激光器有很好的準(zhǔn)直性,如圖2所示,實(shí)驗(yàn)所用線掃描激光器在10 m內(nèi)的誤差為±1 mm,對標(biāo)定產(chǎn)生影響較小。
利用線掃描激光器對待測區(qū)域進(jìn)行逐行或者逐列掃描,結(jié)合攝像機(jī)進(jìn)行等時(shí)間間隔成像,獲取多個(gè)單根激光線的圖像。掃描過程中,攝像機(jī)處于靜止?fàn)顟B(tài),最后將多幅圖像進(jìn)行合成即可完成大靶面的高精度區(qū)域分割,形成一副完整的掃描圖。
最終單根激光線圖像的疊加,本質(zhì)上就是每一組對應(yīng)點(diǎn)像素值的求和。灰度值越高,圖像越趨近于白色,灰度值越低,圖像越趨近于黑色。進(jìn)而疊加的圖像越多,圖像就越白,線激光器的顏色就會(huì)被白色取代。因此,需要對待疊加的圖像進(jìn)行處理,提高圖像的對比度,將圖中的背景設(shè)置為黑色(像素值為0),消除灰度值疊加帶來的影響。
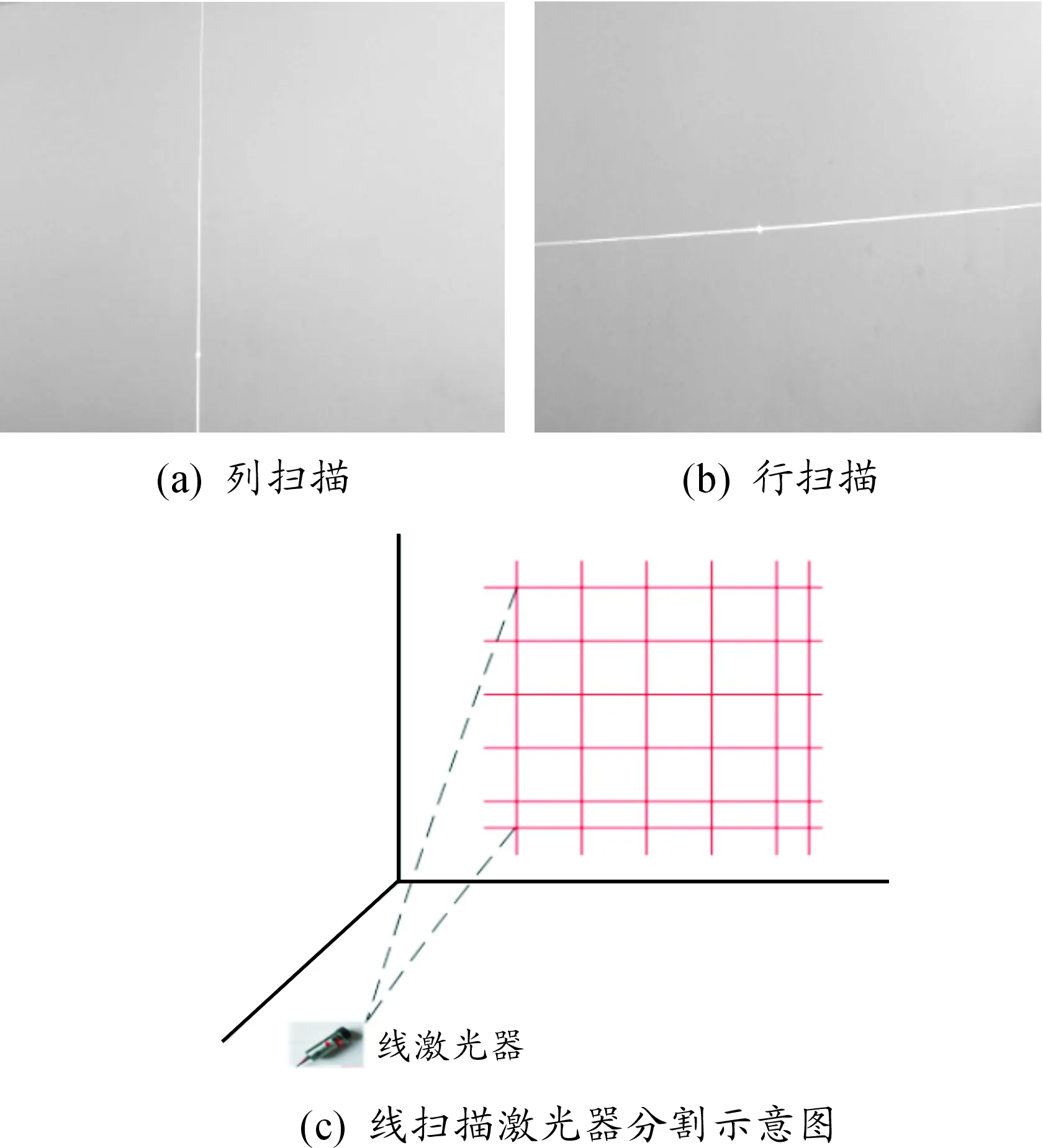
圖2 線掃描激光器對大靶面進(jìn)行區(qū)域分割
2.3 區(qū)域分割測量系統(tǒng)
基于區(qū)域分割的圖像處理技術(shù)可分為3個(gè)步驟進(jìn)行,首先對采集到的圖片進(jìn)行濾波,濾除噪聲干擾。濾波后的圖像如圖3所示。
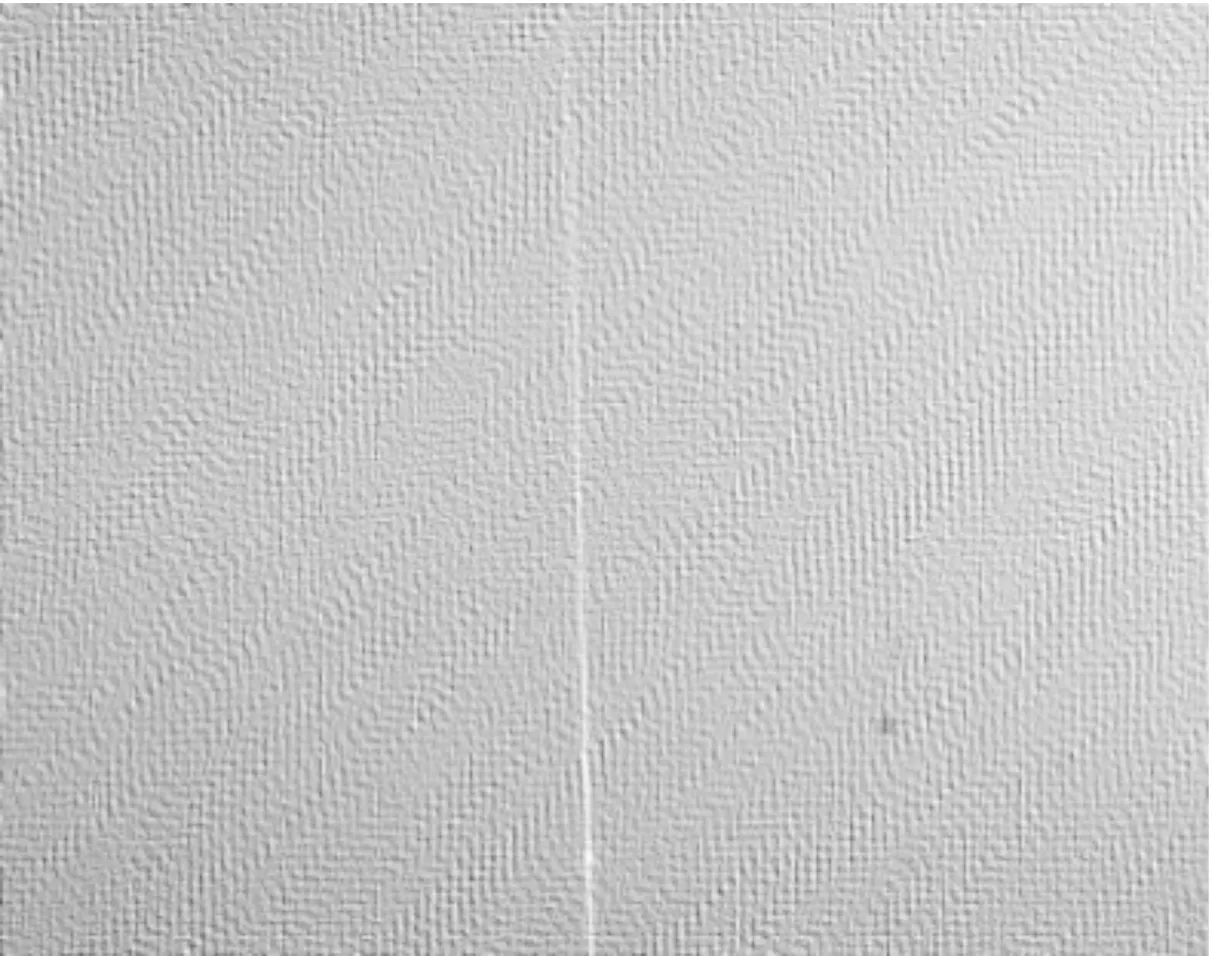
圖3 濾波后的圖像
本文用線掃描激光器把5 000 mm×2 200 mm的視場分割成多個(gè)連續(xù)的400 mm×400 mm矩形區(qū)域,對攝像機(jī)經(jīng)過透視變換進(jìn)行標(biāo)定。
對實(shí)驗(yàn)中的每張圖片來說,其光照強(qiáng)度不同,閾值也就不同。將其RGB色彩空間轉(zhuǎn)換為HSV空間,進(jìn)行重復(fù)多次試驗(yàn),確定出在HSV空間提取線激光的最佳閾值范圍為0.38~0.14,閾值隨光照變強(qiáng)而逐漸減小。所以要根據(jù)圖像像素值的不同選取不同閾值的累加器。
激光線準(zhǔn)直性好,且待處理圖像中的背景噪聲少,可用霍夫直線檢測算法提取激光線特征。所謂直線檢測,即對于直角坐標(biāo)系中的任意一點(diǎn)A(x0,y0),經(jīng)過點(diǎn)A的直線滿足y0=kx0+b(k是斜率,b是截距)。但這種坐標(biāo)系下,會(huì)出現(xiàn)一種特殊情況,那就是k是無窮大時(shí),無法表示直線方程。此時(shí),將坐標(biāo)系換為極坐標(biāo)系,根據(jù)對偶性將圖像中的像素點(diǎn)映射到參數(shù)空間下一條正弦曲線,使用直線的法線表示:l=xcosθ+ysinθ,其中-D≤l≤D,-90°≤θ≤90°,θ為與正x軸的夾角,D是圖像對角線最大距離[14]。這就是霍夫變換直線檢測的基本原理。
設(shè)置一個(gè)合適的門限值,將累加器中累計(jì)值小于所設(shè)定門限的點(diǎn)歸零。圖像中低于所設(shè)門限值的點(diǎn)與圖像中的線掃描激光器成像直線沒有直接的對應(yīng)關(guān)系。查找霍夫變換累加器,用累加器中最大累計(jì)值標(biāo)記該點(diǎn),將其余區(qū)域設(shè)置為零,繼續(xù)查找剩余圖像,并記錄下一個(gè)點(diǎn),直到霍夫變換累加器中的所有累加值都設(shè)置為零。沒有置零的點(diǎn)就是需要提取的直線上的點(diǎn)[14]。將所有的非零點(diǎn)連接起來,記錄檢測結(jié)果,如圖4所示。
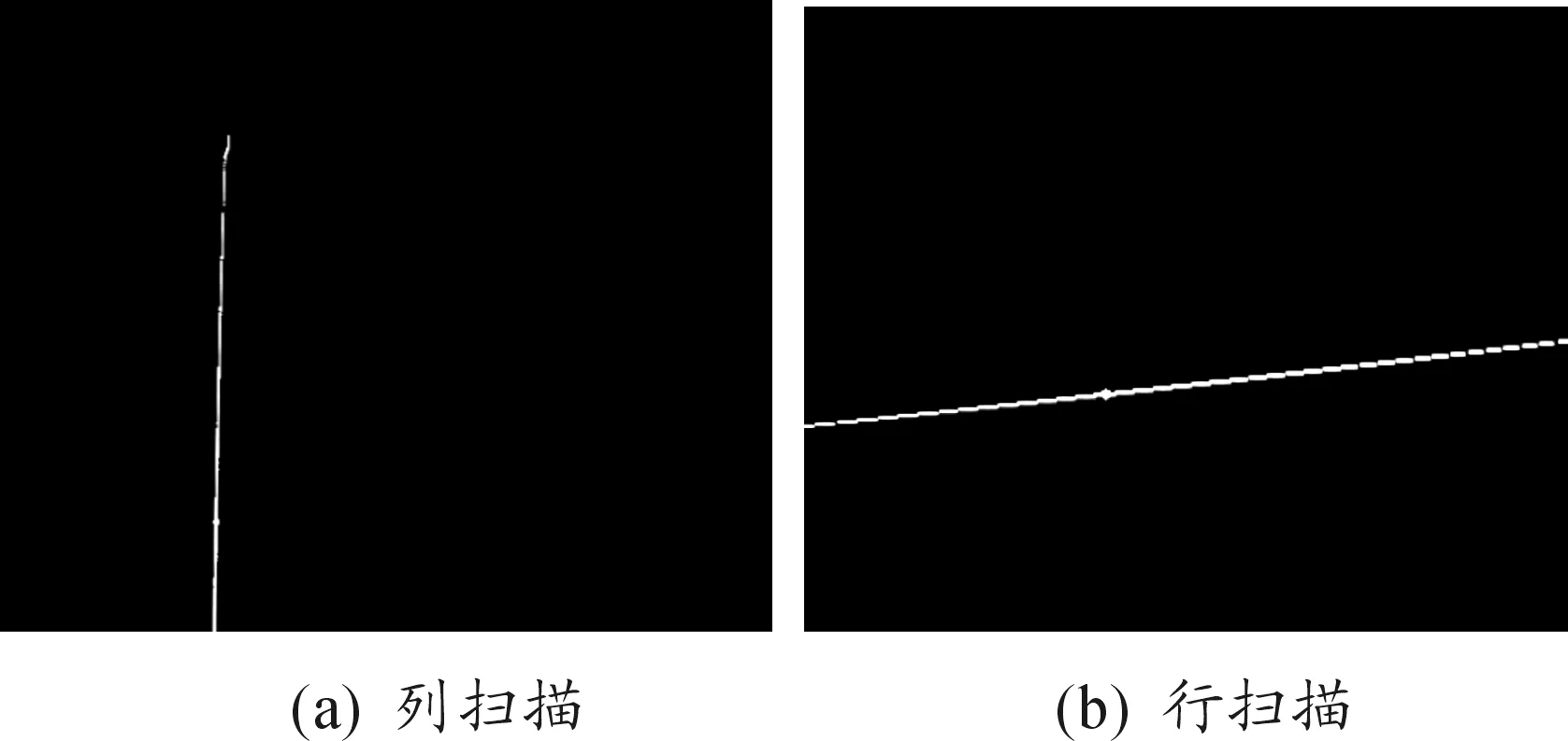
圖4 檢測結(jié)果
最后,將所有采集到的圖像處理后疊加到一起的效果圖如圖5所示。掃描區(qū)域需要覆蓋或大于整個(gè)測量靶面,從圖5中可以看出,除紅色的激光外,所有區(qū)域均為黑色,說明本文區(qū)域分割算法對于大靶面的處理效果顯著。
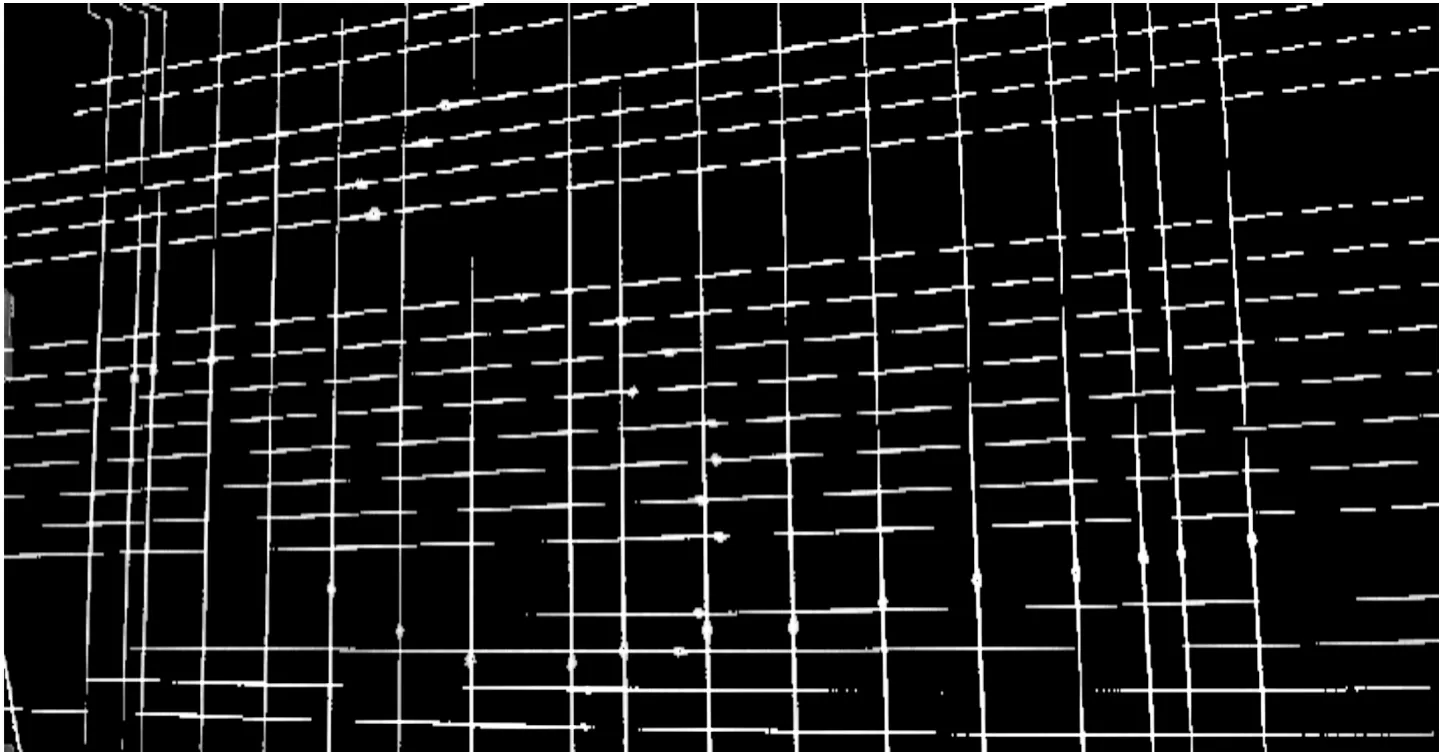
圖5 線掃描激光器分割的網(wǎng)格
3 實(shí)驗(yàn)結(jié)果及分析
在對整個(gè)靶面進(jìn)行區(qū)域分割后,需要對視場內(nèi)的某一點(diǎn)的空間位置進(jìn)行處理定位。首先對圖像進(jìn)行處理,提取出目標(biāo)在圖像中精確的坐標(biāo)位置,根據(jù)生成的激光網(wǎng)格,找出這個(gè)點(diǎn)對應(yīng)的小區(qū)域,最后按照標(biāo)定的數(shù)學(xué)模型以及物象對應(yīng)關(guān)系計(jì)算出實(shí)際目標(biāo)點(diǎn)的空間位置。
目標(biāo)所在位置如圖6(a)所示,首先對圖像中捕捉到的目標(biāo)進(jìn)行圖像坐標(biāo)提取,得到目標(biāo)的中心點(diǎn)坐標(biāo)后,找出它所屬的小分割區(qū)域。如圖6(b)所示,在這個(gè)小區(qū)域內(nèi)求得點(diǎn)的位置,根據(jù)標(biāo)定時(shí)線激光掃描的寬度以及高度,就可以將這個(gè)點(diǎn)還原到整個(gè)大靶面內(nèi)的位置,從而得到其在靶面中的精確坐標(biāo)。實(shí)驗(yàn)中選取50組點(diǎn)進(jìn)行精度驗(yàn)證,所得部分結(jié)果如表1所示。
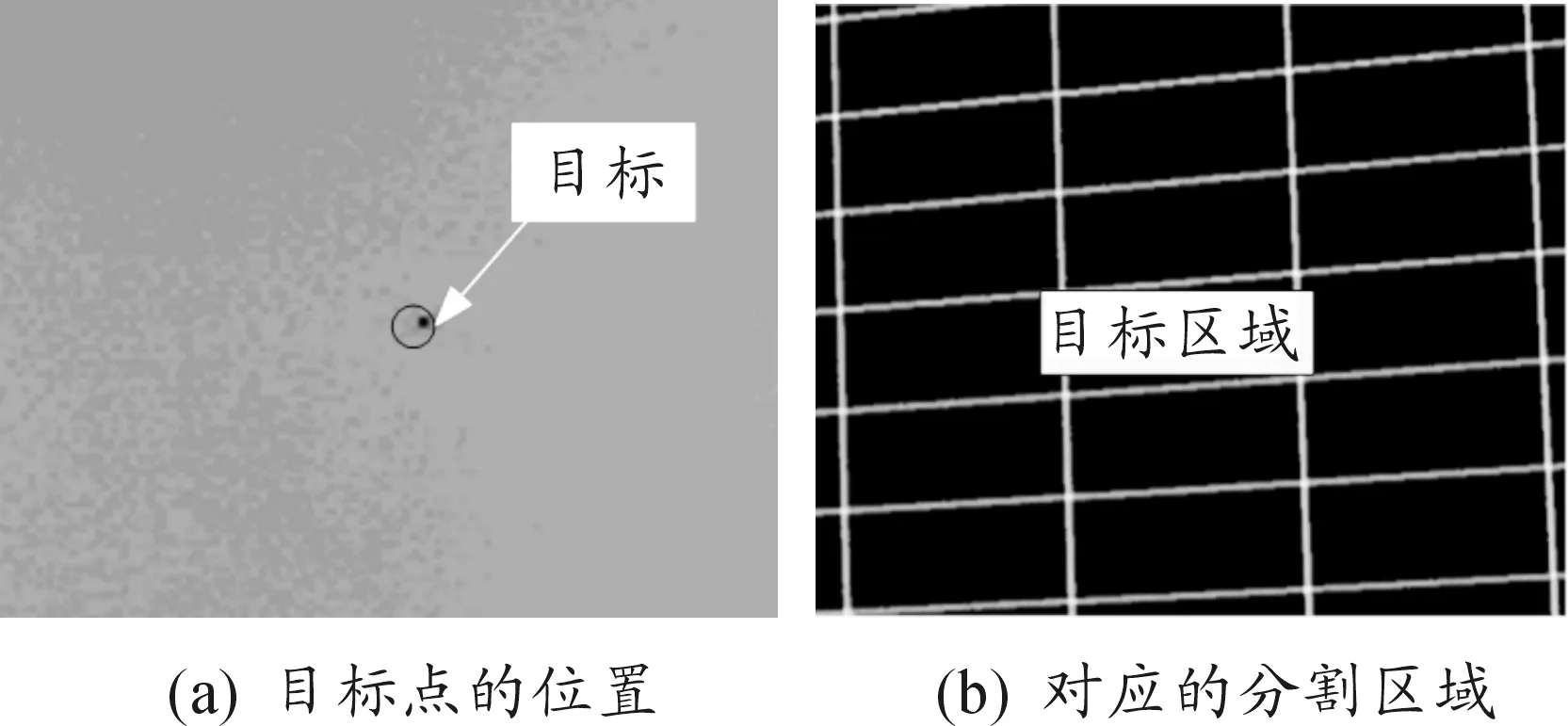
圖6 目標(biāo)與解算區(qū)域的關(guān)系
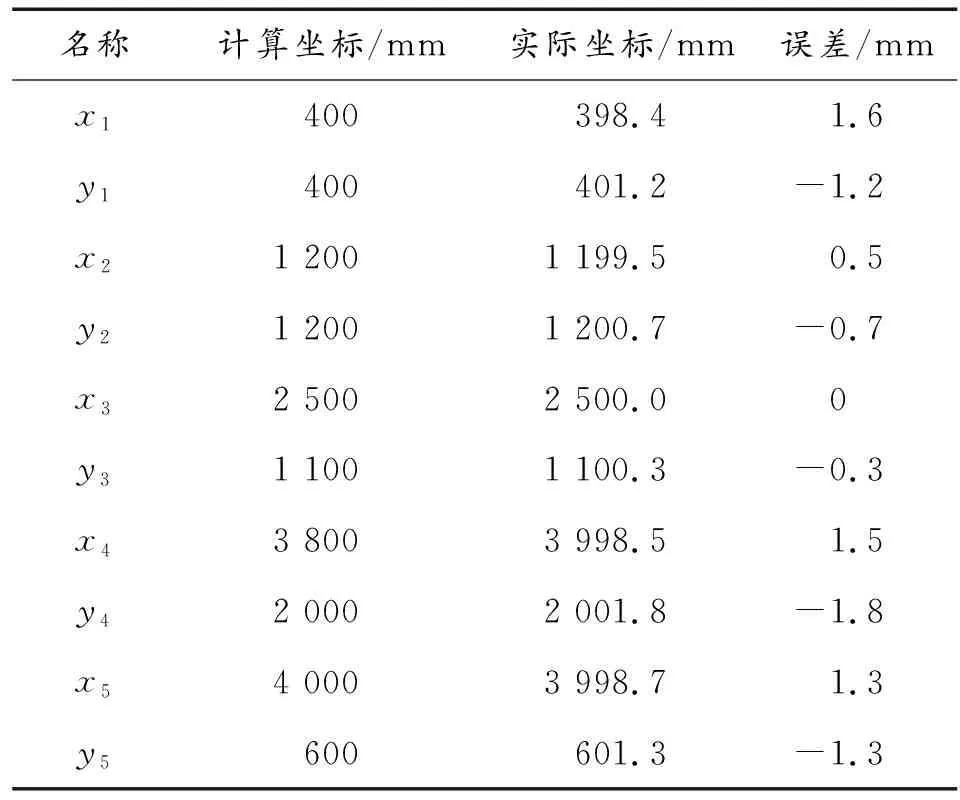
名稱計(jì)算坐標(biāo)/mm實(shí)際坐標(biāo)/mm誤差/mmx1400398.41.6y1400401.2-1.2x21 2001 199.50.5y21 2001 200.7-0.7x32 5002 500.00y31 1001 100.3-0.3x43 8003 998.51.5y42 0002 001.8-1.8x54 0003 998.71.3y5600601.3-1.3
從計(jì)算結(jié)果可以知道,列出的5個(gè)目標(biāo)點(diǎn)計(jì)算精度均小于2 mm。誤差分布范圍在測量平面的中心區(qū)域精度最高,邊沿區(qū)域精度有所下降,總體精度能夠滿足大靶面位置測量要求。
4 結(jié)論
針對單攝像機(jī)對平面空間上大區(qū)域范圍的位置測量問題,研究了矯正透視變換的方法,將大靶面通過激光二維分割變?yōu)樾“忻嫖恢脺y量,從而提高平面邊緣區(qū)域的測量精度。通過實(shí)驗(yàn)分析,采用攝像機(jī)標(biāo)定和區(qū)域分割法計(jì)算平面坐標(biāo),可以大大減小測量誤差,對提高大視場下單個(gè)攝像機(jī)平面約束空間位置的測量精度具有良好的效果。
猜你喜歡
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
電測與儀表(2015年5期)2015-04-09 11:30:52