裝甲車輛動力艙火焰視頻圖像多特征探測與識別方法
2020-05-18 02:51:44周義勇
兵器裝備工程學報 2020年4期
周義勇
(上海電控研究所, 上海 200092)
當前國內外裝甲車輛的滅火分乘員艙和動力艙兩個部分,其中乘員艙涉及到乘員的安全問題,使用兩波段或三波段(包括紅外波段、紫外波段)光學探測器探測火警并進行滅火和抑爆,當敵方破甲彈的射流引燃車內油氣混合氣或彈藥爆炸引起二次效應時,乘員艙的光學火焰探測器能夠在5 ms內作出反應觸發報警完成滅火抑爆,保護乘員的人身安全;而動力艙的火警探測采用線式火焰傳感器安裝于動力艙的周圍壁上,通過線式火焰傳感器感知動力艙內的異常高溫來判斷火警并觸發信號進行滅火,其響應時間一般3~5 s,其過大的延遲響應時間可能會喪失裝甲車輛的動力性能或戰斗力[1]。
近年來,國內外對火焰檢測方面有著廣泛的研究,提出了很多火災探測視頻技術和算法。袁偉在博士論文[2]中提出利用局部二元模式LBP、Gabor算子等局部特征描述并提取火焰的局部紋理特征、頻率特征,再利用Adaboost分類器學習訓練主動式識別方法提高火焰識別率。吳建勝[3]提出的基于OHTA顏色空間最大類間方差法并通過Otsu閾值來分割火焰區域,再利用三幀差法進行火焰的確定。Toreyin[4]對火焰的邊界采用小波變換,提取其高頻特征來描述火焰的閃爍特征。Jenifer[5]采用概率論統計的方法,對火焰的顏色、面積、表面粗糙度、偏斜度進行統計,然后使用貝葉斯分類器進行決策。總體來說,國內外視頻火焰探測方法算法差異很大,普遍存在著計算量太大不利于要求高實時性場合的實際應用,因此提出高效的火焰視頻探測識別和檢測算法具有重要的意義。
對此提出通過在動力艙安裝視頻采集火焰視頻,對火焰固有多特征(靜態特征和動態特征)進行分析,首先通過火焰的顏色特征建立火焰的顏色模型并提取疑似火焰區域;其次通過提取疑似火焰區域的閃爍特征、面積變化特性等動態特征,進一步判斷待檢區域是否發生火災從而觸發火警信號,從探測到疑似火焰區域,通過算法進行探測識別并輸出火警觸發信號,其響應時間為500 ms左右,相對于原先的線式火焰傳感器探測方式,具有響應時間快、判斷準確、可靠性高等優點。
1 火焰圖像顏色特征的描述與疑似火焰區域分析提取
火焰的靜態特征是視頻采集中單幀數字圖像所表現出來的固有特征,主要體現在火焰突出的光譜特征和獨特的火焰空間區域特征兩個方面[6-7]。因此,本文從火焰圖像區域的顏色特征和形狀特征來分析和提取火焰圖像的疑似區域。
火焰的顏色特征主要體現在其與動力艙環境強烈的亮度對比和獨特的顏色信息上,火焰發光、發熱的特征在視頻圖像中表現為該區域的像素點的色度值偏紅并且亮度值明顯高于艙內其他區域的像素點[8],因此通過RGB顏色模型和HSI顏色模型的公式變換來提取疑似火焰區域[9]。
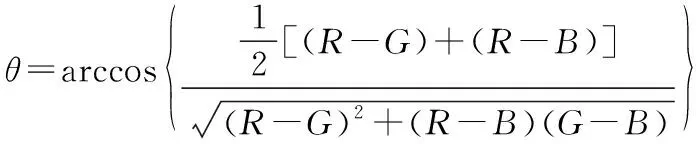
根據RGB和HIS模型的特征,其RGB顏色空間到HSI顏色空間的轉換關系如式(1)所示:
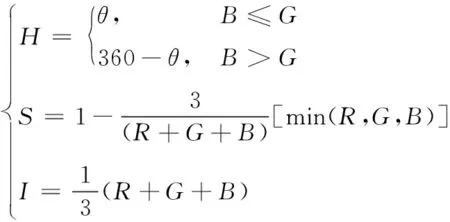
(1)
利用火焰顏色的R、G、B三個分量之間關系的分析過程,對火焰顏色分量分別進行提取,不同的顏色分量如圖1所示。
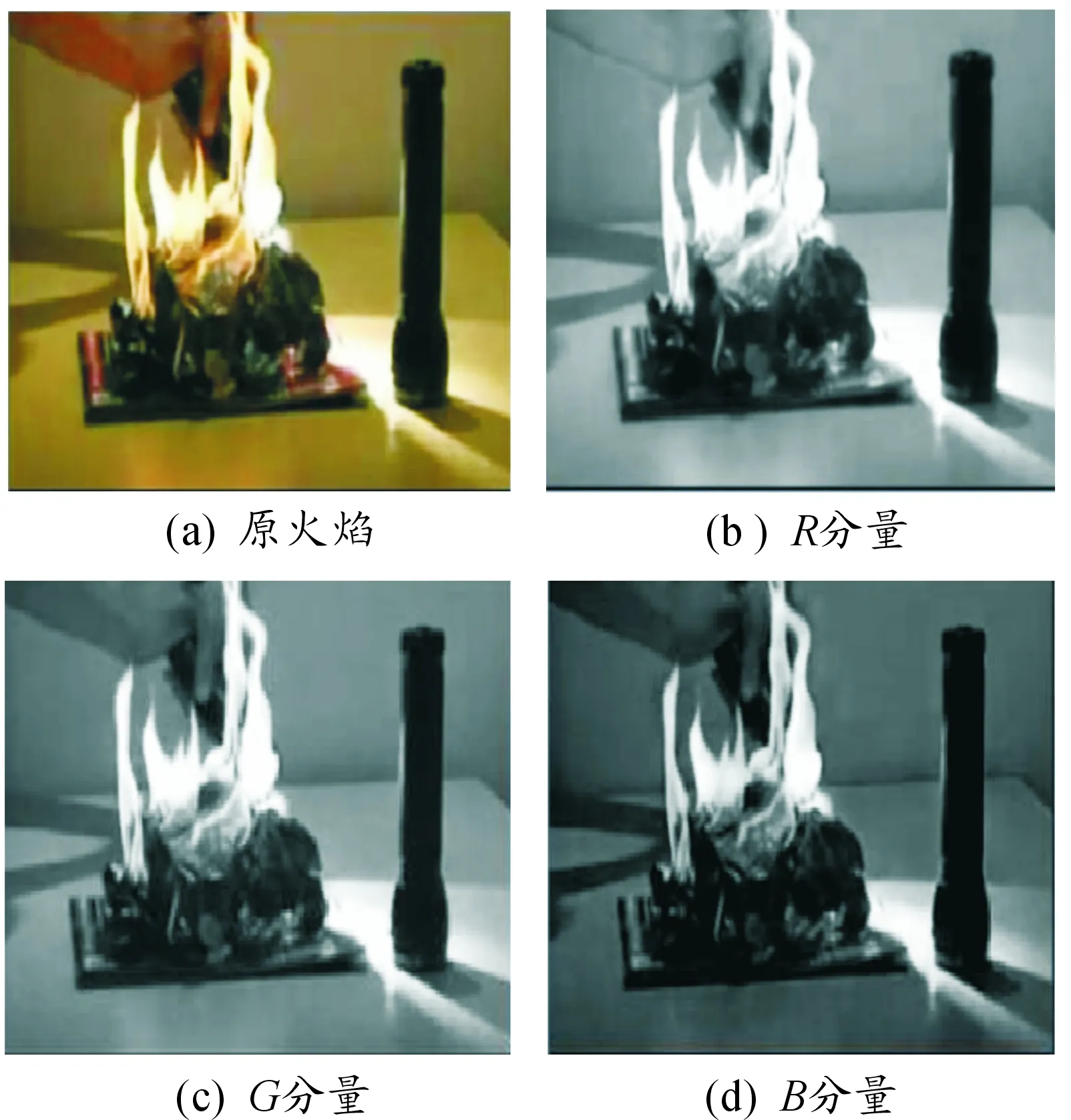
圖1 火焰顏色分量
從圖1可以看出:對于圖像中顏色偏紅和紅黃的火焰區域,僅含有R分量的火焰圖像明顯是最亮的,說明該區域中的R分量的值最大,其次是僅含有G分量的火焰圖像,最暗則是僅含有B分量的火焰圖像[10],根據明亮程度可以初步得到,這些區域R分量的值大于等于G分量的值,G分量的值大于等于B分量的值。各顏色分量轉化成直方圖[11]如圖2所示。
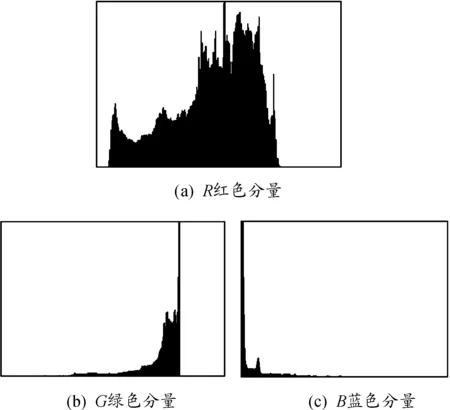
圖2 火焰顏色分量直方圖
原圖像的R、G、B三通道的直方圖可以看出,在火焰區域中R分量像素值要大于G分量的像素值,G分量的像素值大于B分量的像素值。對于每個火焰像素點,紅色分量R取值大小的統計結果如表1所示。

表1 火焰圖像R值統計表
經統計分析發現,在16 129個火焰像素點上,大概80%的火焰像素點紅色分量的值是大于100的,當R分量的值限定到125以上時,滿足這一要求的火焰像素點僅能達到10%。所以認為火焰的像素點R分量取值范圍是100~120。在這里我們取火焰像素點的閾值RT為115。
火焰的顏色是介于紅色和黃色之間,映射到HSI顏色模型中,色調H的取值范圍為0~ 60。火焰的飽和度S會隨著背景亮度變化而變化,對于同一像素點,當R分量的值為RT時,飽和度S對應為ST。通過統計分析火焰區域R、G、B、H、S、I分量的大小關系可知,R分量和飽和度S之間的關系如圖3所示。

圖3 火焰像素點R分量與S分量關系示意圖
火焰像素點滿足條件S≥((255-R)*ST/RT),這個條件說明隨著R值的增大飽和度會降低。當R值增加到最大值255時,飽和度會降低到0。
通過上面的分析可得到火焰的顏色模型如式(2):
(2)
通過上述的顏色模型公式,可以粗略地分割出疑似火焰區域。
2 火焰面積和火焰閃爍特征分析
在確定火焰疑似區域后,根據動力艙的內部環境特性,對火焰面積和火焰閃爍特征分析,從而確定火焰存在并觸發火警信號。
在動力艙內部封閉環境中,發生火焰區域的面積表現為連續性、不斷擴展的變化趨勢[12-13],因此攝像頭采集的視頻圖像監測到的疑似火焰目標面積相對于靜態的艙內環境也會逐漸變大,通過目標圖像火焰面積分析對疑似火焰連續視頻幀的圖像進行算法分析,先通過閾值分割出疑似火焰目標區域,然后統計出目標物體的像素點數,同時計算相鄰視頻幀的像素點的變化率來判斷火焰的閃爍特征,確定火焰的存在[14-15],具體算法如下:
Ai為第i幀圖像疑似火焰區域的面積,Ai-1為第i-1幀圖像疑似火焰區域的面積,ad為相鄰幀疑似火焰區域面積變化率,m為滿足連通區域面積大于閾值T1的連續幀數。
1) 首先判斷第i幀圖像連通區域的面積Ai是否大于閾值T1;
2) 在滿足Ai大于T1的條件下,m++,判斷連續幀數m是否大于5,一旦Ai小于T1出現,則m清零;
3) 如果m≥5成立,計算此時疑似火焰區域面積的變化率ad,同時m清零;
4) 若1.15≤ad≤ 20,或者ad< 0.85則認為,此疑似火焰圖像可能具有閃爍性,則an++;
5) 保存當前幀火焰區域的面積Ai作為下一幀的Ai-1,用來下一幀的面積分析;
6) 若ad值不在(4)范圍內,認為疑似火焰區域面積在相當長的一段時間內沒有太大變化,不符合火焰面積變化規律,則所有的計數器清零,包括an計數清零;
7) 如果an>T2則認為此區域滿足火焰的面積變化規律,判定此區域發生火災。
采用360P,30fps攝像頭對該空間進行疑似火焰圖像視頻流進行采集并靜態特征分析,其疑似火焰一般在發生初期10 ms內就能識別確定,據實際環境以及經驗,動力艙的攝像頭有效探測空間約為1 m2,因此其疑似火焰區域的感光成像面積即連通區域像素點總數基本確定,其閾值T1一般500~700范圍內,通過實驗得知當T1=600時,能夠實現排除一般的噪聲干擾和其他背景干擾的影響,并且能把漏檢率降到最低。滿足面積變化率的累積計數an=3,即這里統計連續的15幀(m乘以an)范圍內能夠滿足面積變化率的計數an超過T2=3計數時,則認為滿足火焰的面積變化規律和火焰的閃爍性特征,同時在500 ms內完成檢測確定,其火焰面積以及閃爍特征算法流程如圖4所示。
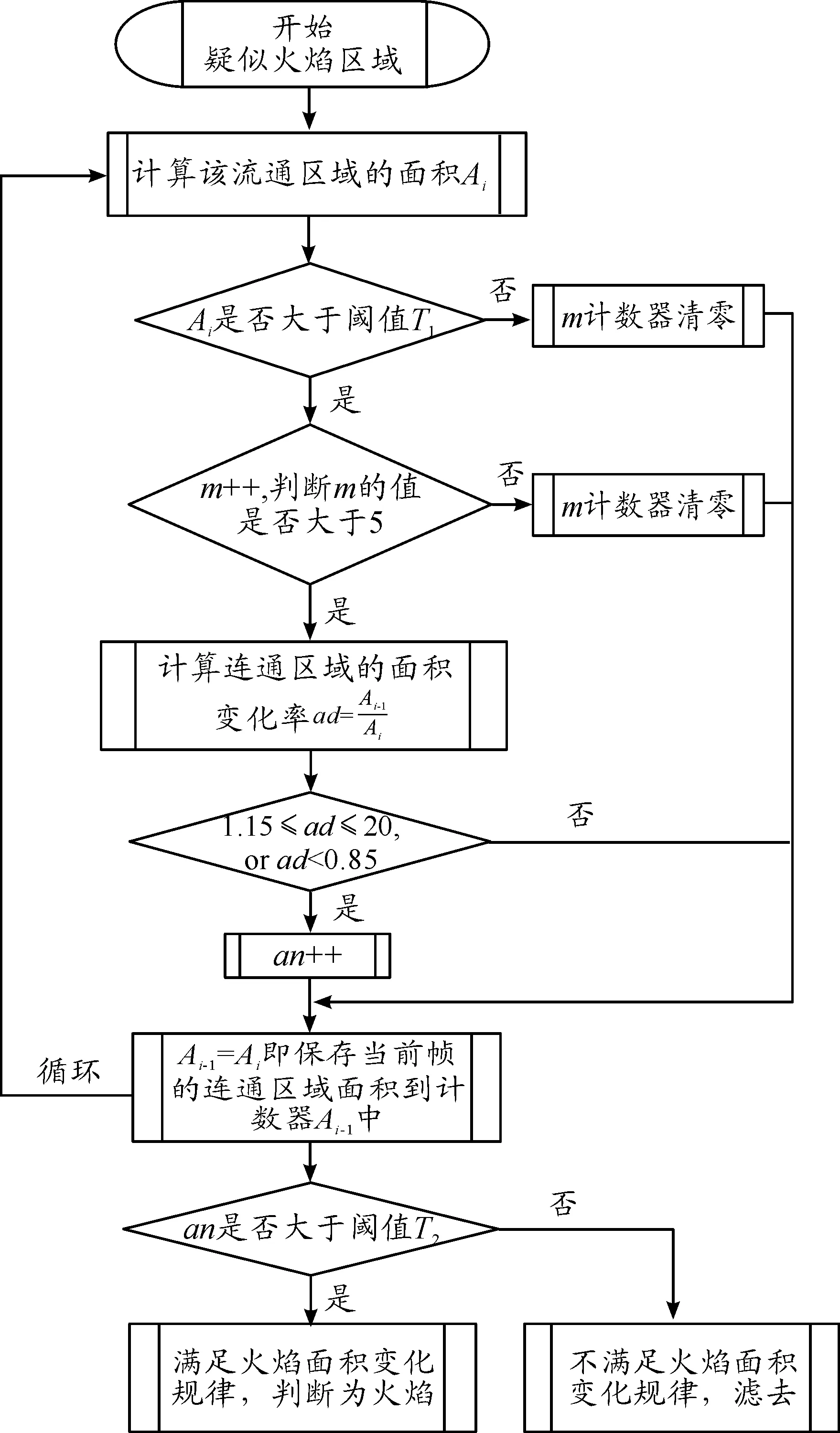
圖4 火焰面積分析算法流程
3 方法的試驗結果和分析
參考動力艙限定的封閉空間環境,建立動力艙模擬環境實驗室并人工產生火源,彩色CCD攝像頭采集火焰圖像視頻流并進行靜態區域提取和動態特征分析,圖5為以時間軸為順序經圖像預處理的火源視頻截圖。
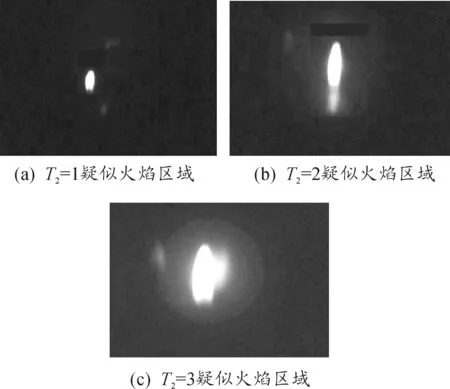
圖5 圖像預處理后的火源視頻截圖
其靜態分析火焰圖像的R值統計結果見表2(RT為115時)。

表2 火焰圖像R值統計表
圖6表示了疑似火焰的連通面積,可以看出:根據火焰的動態連續擴展特性,其連通區域面積具有持續變大的趨勢。通過圖像算法分析,計算相鄰視頻幀的像素點的變化率(ad)來判斷火焰的閃爍特征,因為火源是生長狀態,因此ad值是大于1的,如火源在熄滅過程,則ad值小于1,見表3。
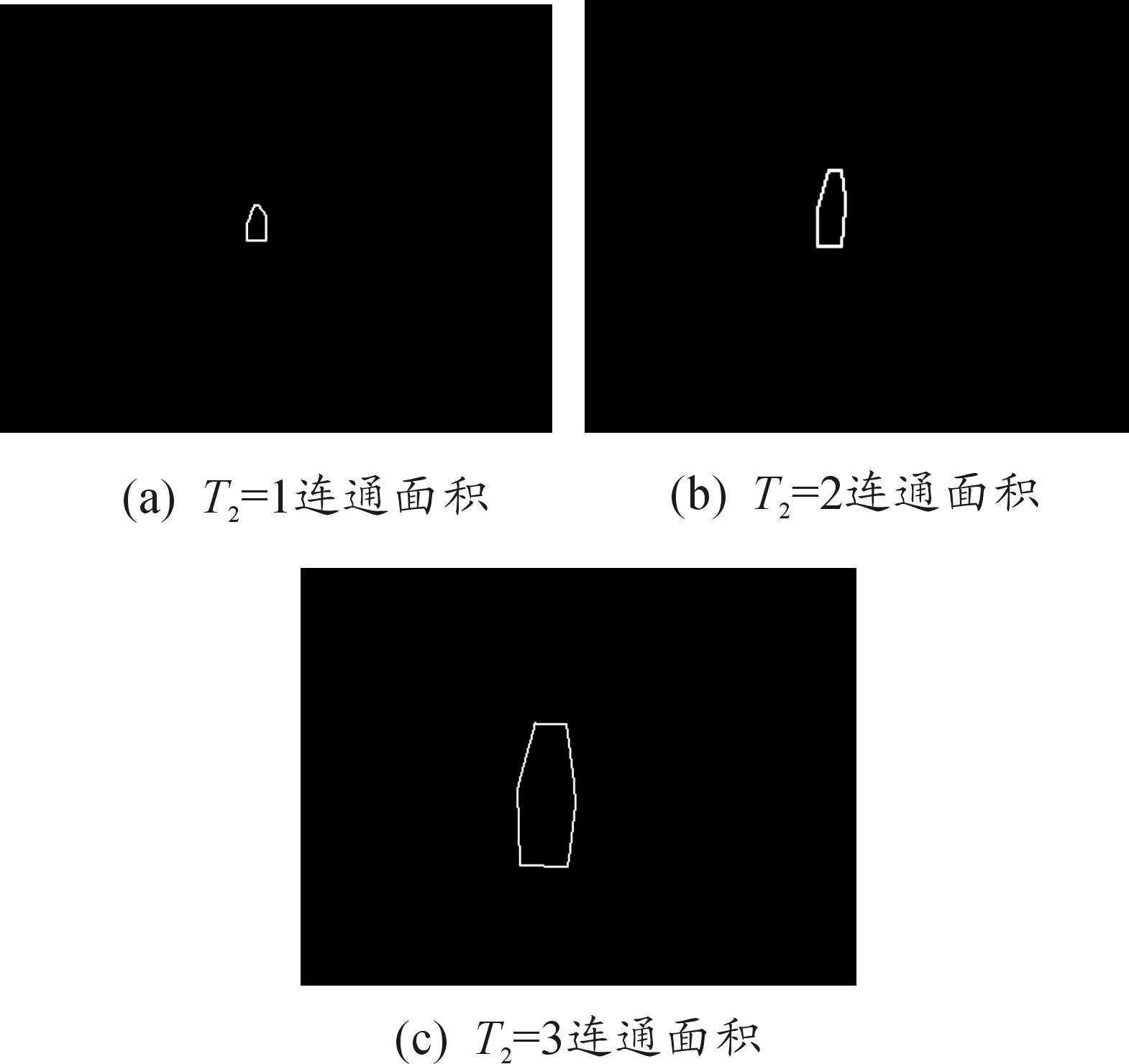
圖6 疑似火焰連通面積
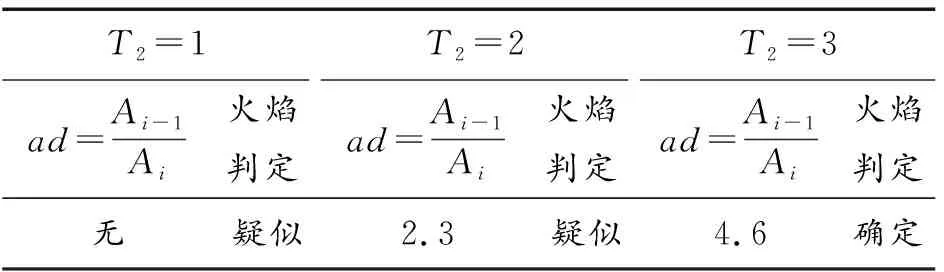
T2=1ad=Ai-1Ai火焰判定T2=2ad=Ai-1Ai火焰判定T2=3ad=Ai-1Ai火焰判定無疑似2.3疑似4.6確定
根據其火焰閃爍特征分析判定方法,即ad值在1.15≤ad≤ 20范圍內,并且滿足面積變化率的計數an超過T2=3計數時,則認為滿足火焰的面積變化規律和火焰的閃爍性特征,判定火焰發生。
4 結論
通過對裝甲車輛特定環境內提取火焰的顏色特征,形狀特征等靜態特征確定疑似火焰區域,并且提取疑似火焰區域閃爍特征、面積變化特征等動態特征并進行算法分析,進一步判斷待檢測區域是否發生火災。通過建立動力艙模擬環境實驗室并試驗,文中提出的多特征火焰分析和識別算法能快速確定動力艙的火焰發生,使視頻探測裝甲車輛動力艙火焰發生的技術可行,從而取代傳統的線式火焰傳感器。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52