一種基于機器學習的自然調光LED節能燈
2020-04-24 14:50:40李巒陳英革王小英
電腦知識與技術 2020年5期
關鍵詞:機器學習
李巒 陳英革 王小英
摘要:隨著照明科學的發展與機器學習技術的進步,社會上對專業照明光源的需求不斷提高。而傳統的照明光源能耗大、調光非線性、智能化程度低,不能滿足當今社會的需要。針對這種現象,設計了一款面向多領域的智能調光照明系統。該照明系統以51單片機為核心,結合人體傳感器、光線傳感器進行環境監測,通過機器學習算法、伽馬自然調光算法、色溫計算算法進行分析與處理,使照明光線時刻處于最佳狀態,滿足不同領域的專業人士對工作光線的要求。經過實際的運行與測試,該照明系統具有功耗低、穩定、擴展性強等優點,可以為藝術工作者、醫療工作者等提供專業的照明光源。
關鍵詞:發光二極管;節能燈;機器學習;伽馬調光;色溫調節;環境光感應
中圖分類號:TP272文獻標識碼:A
文章編號:1009-3044(2020)05-0231-05
開放科學(資源服務)標識碼(OSID):
近年來,隨著LED技術的快速發展,以LED為光源的照明設備得到了廣泛的應用,其以低能耗高亮度著稱,且可以調整燈珠亮度以適應不同的應用場景[1]。充分利用LED可調光的特性,讓照明環境更智能、更節能,才能更好地滿足不同使用者的需求。研究表明,照明系統的光源色溫對人體的體溫調節系統、熱平衡系統以及情緒管理系統都有一定影響[2],光照環境的色溫還會影響人們的視覺感知。因此,一些專業領域的工作者或待康復的患者往往需要更自然的動態照明。目前社會上傳統的照明系統大多功能單一、能耗較大、調光非線性,長期在此照明環境下工作或生活會影響到使用者的工作效率,甚至產生不必要的情緒波動。而且不合適的調光方式還會干擾藝術工作者對色彩的辨識能力,嚴重影響工作效率。
隨著人工智能的興起與快速發展,很多傳統設備都逐漸向智能化方向發展,但目前市面上已有的調光照明燈大多還停留在手動調光方面,需要使用者主動調節照度。部分照明系統可以記憶上一次工作時的亮度,但通常情況下,使用者在一天內要多次使用照明設備,而大部分使用者在不同環境光下對光源照度的需求不一樣,使得用戶在每次使用時都需要手動調節光源照度。而且傳統的照明燈缺乏合理的人機交互,使用者往往無法直觀快速的得出當前時刻照明系統的照度水平。根據這些現象,本文設計開發了一款自然調光的LED節能燈,融入了當今主流的機器學習技術,并配有多種傳感器,使其具有較高的智能,可以不斷學習使用者的習慣,為使用者提供個性化的照明環境。
在LED光源設計方面,本文參考了目前市面上廣泛應用的三種色溫調節技術:1)RGB技術[31;2)冷暖白光LED混色技術[4];3)多芯片集成白光LED調光技術[5]。本系統綜合技術可行性和性能穩定性,選擇第二種方案作為光源系統。
作為一款面向多領域的實用新型智能照明控制系統,在滿足顯示性能指標要求下,還必須做到自然的調光過程、智能的學習方式以及驅動不同功率的LED陣列。
1 系統總體設計
自然調光LED燈是基于STC89C51平臺開發設計的,融入了機器學習技術中的K-means聚類分析算法。
主控制器采用了STC89C52RC單片機作為系統控制核心,并配置人體傳感器、光線傳感器等傳感器。傳感器時刻探測周圍環境,單片機則根據接收的傳感器信息不斷分析處理,并根據用戶的使用情況調整LED照度。為了避免電磁干擾,控制器與驅動器分為兩個獨立電路,控制器發出PWM波控制MOS管開關以驅動LED燈。本文所設計的智能LED節能燈在保證系統性能與體驗的前提下,極大的節約硬件成本,降低系統功耗。
主控制器能實現的主要功能有:
1)智能調節:當照明系統啟動時自動檢測當前環境光強度,通過機器學習算法計算分析使用者習慣并自動調節燈珠照度。
2)伽馬調光:當系統接收到調節照度的信號時,控制系統即通過伽馬自然調光算法對燈珠驅動電流進行非線性調整,即較緩慢地將燈珠的照度調整至目標等級,并使照度的平均變化率保持穩定。這樣可以使照明系統光線的變化更接近自然光的變化,給使用者營造一種更自然的工作環境,避免了使用者因照明系統調光不當而引起的視覺疲勞或情緒波動。
3)白動節能:當使用者遠離照明系統時而未將其關閉時,系統自動開啟節能模式,降低燈珠照度,維持較低功耗;當使用者接近照明系統時,系統自動恢復之前照度。
4)主動調節與數據顯示:為了方便使用者主動調節照明系統的亮度及色溫,并進一步擴大應用范圍,本系統配備了微動按鍵用于使用者的手動調節,同時按鍵具有防水的性能,可以有效避免因潑濺造成的控制系統故障。為了便于使用者直觀的獲取當前時刻照明系統的照度,本系統配有低功耗、廣視角的OLED顯示屏,實時顯示當前照明系統的亮度和色溫,使用者可以根據數值科學選擇最佳照度。
5)無可視頻閃:本系統利用51單片機的定時器功能發出穩定的高頻可調方波,使LED燈珠以每秒超過100次的高頻率閃爍,使用者觀察不到光閃現象,避免因照明頻閃導致使用者視覺疲勞或者神經敏感等不良反應。
2 系統硬件設計
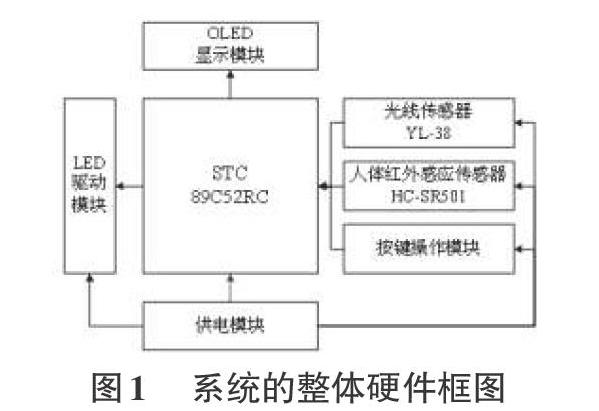
本系統為提高擴展性,負載更大功率的發光器件,將硬件系統分為兩部分,分別為控制系統和驅動系統。其中控制系統的硬件包括主控芯片、環境光線傳感器、人體探測傳感器、按鍵控制模塊以及一片OLED顯示屏。主控系統采用了ATMEL公司生產的高性能CMOS 8位單片機,片內含8k bytes的可反復擦寫的Flash存儲器,足以存儲大量的程序數據。同時具有豐富的1/0口和定時器以供系統功能擴展。系統的整體硬件框圖如圖l所示。
11 YL-38環境光線檢測傳感器模塊采用的是光敏電阻和寬電壓LM393比較器構成的光線檢測模塊。其核心光敏電阻具有在自然光線照射下,其阻值迅速減小的特性。具有極高的靈敏度。YL-38模塊有兩個輸出端,AO和DO,其中AO端輸出模擬量電壓,通過A/D轉換器將模擬量轉換成數字量,可以得出精確的環境光強度等級。DO端為數字信號輸出端,輸出高低電平,可以直接被單片機1/0口識別。本文選擇接受開關量信號,僅檢測環境光亮度強弱。
21 HC-SR501人體探測傳感器模塊是基于紅外線技術的人體感應模塊,此模塊體積小,功耗低,感應范圍大,靈敏度高,可以快速探測到附近是否有生物體。其核心元件,被動式紅外傳感探頭(PIR)采用的是德國生產的LHI778雙元探頭,可以靈敏的探測到紅外光譜的變化。當生物體穿過感應區域時,人體所發出的紅外光到達雙元探頭的時間、距離都會有差值,從而判斷出是否有生物體進入感應范圍。
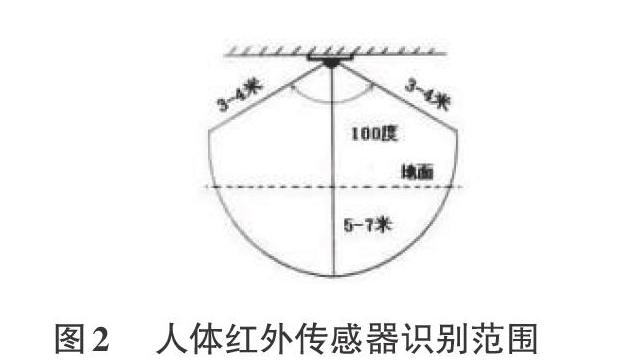
為了增加感應角度范圍,本模塊采用了圓形透鏡,使得探頭可以感應四個方向。模塊的感應范圍如圖2所示,最大感應角度為100度,直線感應距離為5-7米,最大感應角度下感應距離為3-4米,當人橫向穿過感應區時,即沿圖示地面的方向移動時,PIR可以靈敏的檢測到,但當人徑直走向紅外傳感器探頭時,PIR可能無法快速地檢測到感應區域是否出現生物體。根據PIR的特性,本系統將人體探測傳感器模塊安裝在LED陣列面板上,令紅外探頭對準作業平面,可以有效避免感應失靈的現象。
31顯示部分本系統選用了0.96英寸、分辨率為128*64的四線制OLED屏。其通信方式為I2C串行通信,使得與單片機的連接更簡單。I2C總線是Philips公司提出的一種用于集成電路之間的通信協議,其目的是簡化電子系統中各個IC器件之間的連線。應用I2C總線可使電子器件之間只需通過SDA、SCL兩條連線就可以傳送數據。本系統利用單片機的1/0口模擬12C接口通訊[6],采用頁尋址的方式向OLED屏發送指令,達到了驅動OLED屏的目的。其中驅動OLED屏顯示文字及所需圖像的字符由取模軟件自動生成,保存在單片機中。
4)由于單片機10口的輸出電壓較低,不足以驅動大功率的LED燈珠,因此,控制系統需要外接更大功率的驅動電路。驅動模塊采用了基于MOS管的PWM控制開關,通過PWM波控制MOS管的導通和閉合,進而控制供電電路的開啟和關閉[7]。模塊內部為雙MOS管串聯的結構,內阻低,負載電流大,開關靈敏,可分辨頻率在20KHz以內的方波。當單片機輸出占空比可調的PWM波至開關模塊時,開關模塊根據PWM波的高低電平不斷接通、斷開供電電路,不斷點亮、關閉LED燈。由于人眼具有視覺暫留的特性,當一幅畫面在視網膜上形成,視覺將對這幅畫面的感覺維持一段有限的時間,當單片機輸出PWM波的頻率大于100Hz時,雙MOS管控制的LED燈珠的閃爍頻率也會大于100Hz,此時人眼所看到的照明光源就是穩定的,無可視頻閃,從而避免因光閃所帶來的各種生理問題。
3 系統軟件設計
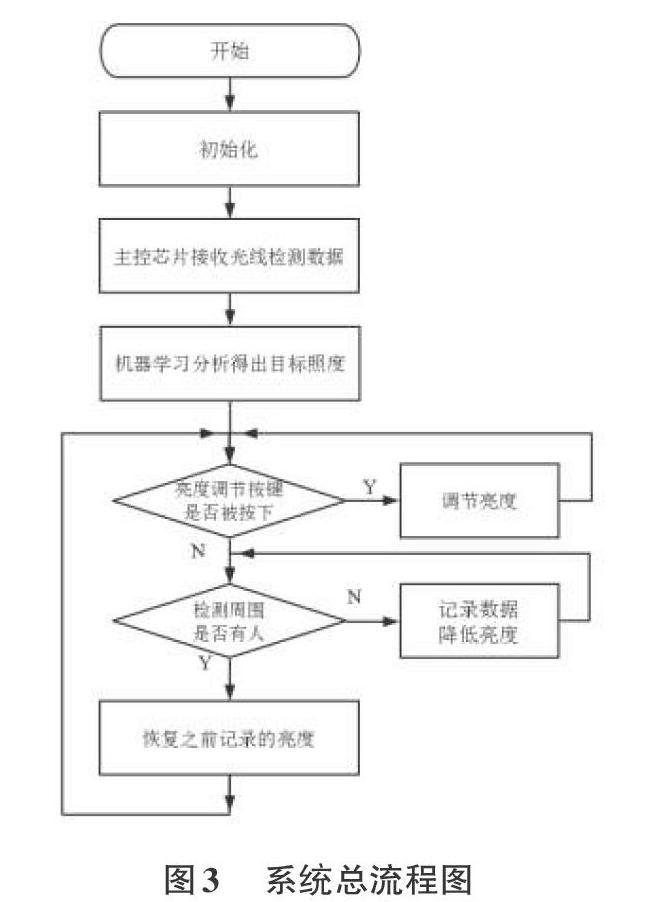
系統軟件部分主要包括K-means機器學習算法、雙路占空比可調PWM輸出1[8]模塊、伽馬自然調光算法、色溫計算算法、人體感應節能系統5個部分,系統丁作時的總流程如圖3所示。
系統在啟動時,會自動檢測當前的環境光強度,并根據采集的傳感器數據結合使用者習慣通過機器學習系統處理分析,計算出使用者的期望照度。接著,系統調用伽馬自然調光系統計算出最佳調光曲線并轉換成PWM波占空比調節曲線,單片機沿此曲線勻速調節PWM波的占空比直到光源達到目標照度。在照明系統工作期間,如果系統檢測到周圍沒有人時,系統會自動將照度調至較低水平。直到使用者重新回到照明系統工作范圍。當LED燈連續工作一定時間以后,系統白動檢測當前的照度和環境光亮度,并記錄保存在主控芯片中,以作為使用者的偏好習慣數據存儲在處理器內部存儲器中,系統會自動進行機器學習處理,不斷學習使用者的用光習慣,為下次啟動時提供更智能的光源照度。為了有效利用系統資源,本系統限定訓練樣本容量,當樣本數達到最大時,此時增加新的訓練樣本會刪除最早記錄的樣本數據。本系統主要算法介紹如下所述。
3.1 機器學習算法
由于自然環境光隨著時間變化一直在改變,使用者在不同時間段內對照明燈的照度需求也往往不同。因此控制系統則需要不斷記錄并學習各個時間段內使用者的用光習慣,當使用者啟動照明燈時,系統自動檢測當前環境光強度,并進行K-means算法分析[9]。分析出使用者的用光習慣并自動調節,保證使用者每次啟動時,照明系統都將呈現最符合使用者習慣的照明環境。其中K-means非監督機器學習算法的偽代碼如下所述。
begin
檢測當前的環境光強度;
將最早記錄的k個點作為初始聚類中心;
while
計算每個樣本點到每個中心的距離;
選取距離最短的中心點作為其聚類中心;
利用得到的聚類重新計算中心點;
重復計算直到聚類中心不再移動;
end while
end
根據環境光強度值選取對應中心點作為使用者的期望照度;
其中兩個點之間的距離采用歐式距離計算法,n維的歐式距離計算公式為:
由于K-means機器學習算法需要不斷地進行樣本分類調整,不斷地計算調整后新的聚類中心[10],且大部分運算都是浮點運算,因此,當數據量非常大時,系統需要占用極大的系統資源。51單片機作為微型控制系統,本身不具備強大的浮點計算能力。為了提高系統運行效率同時保證機器學習的準確度,本文對K-means算法進行了針對51單片機平臺的適配,將數據維度降低至2維,選取用戶第一次設置的數據作為初始聚類中心,避免傳統算法中因隨機選取初始聚類中心而導致分類結果不穩定的現象。通過計算每2個數據點之間的二維切比雪夫距離,對每個數據點進行歸類。適配后的二維切比雪夫距離計算公式為:
d= max(|x2-x1|,|y2-y1|)
(2)
切比雪夫距離最初是用于計算國際象棋棋盤中王從一個位置移動到另一個位置時所需的步數,后來逐漸延伸為表示二維直角坐標系中兩點的超凸度量,故在二維數據集中,切比雪夫距離與歐式距離成正相關。因此,本系統將機器學習算法中的計算歐式距離改進為計算切比雪夫距離,降低了機器學習系統的資源占用率,提高了運行效率。
3.2 伽馬自然曲線調光算法
人的眼睛為了適應更大范圍內光線,會隨著進光亮的多少不斷調節瞳孔的大小。所以人眼對光線的感知是非線性的。在弱光環境下,人可以分辨出光線細小的變化;而強光環境下,入往往只能感受到光線的劇烈變化。為了讓照明燈能更好地適應人類的生物特性,本文設計了伽馬(Gamma)自然曲線調光算法。通過沿著特定的伽馬曲線非線性的調整LED燈的亮度,進而使人的眼睛對LED亮度變化的感知保持較低的非線性誤差。其中伽馬方程為:
y=x 1/Gamma
(3)
式中Gamma為伽馬系數。根據文獻數據結果顯示[11],Gamma值取2.2時,所生成的伽馬曲線最接近實際物理上的二次衰減。其中伽馬曲線如圖4所示。
為了降低能耗,本系統使用的是低功耗的STC89C52芯片,但此芯片計算資源有限,不能負擔較大的指數運算。為了提高系統效率,本系統將亮度分成100個級別,在系統外通過公式3計算出每個亮度級別對應的方波占空比,這些數據以數組的形式存儲在單片機內部存儲中。當系統需要調整LED亮度,即將目標亮度等級傳輸給伽馬調光系統,接著系統會通過查詢對應數組,將輸出方波的占空比逐漸調整至目標值,從而實現平滑的自然調光。
3.3 色溫計算算法
由于本系統采用了冷暖白光LED混色技術作為光源系統,并不能直觀地反映出色溫等級,為了便于使用者快速獲取照明系統的實時色溫數據,本系統設計了通過冷暖白光LED的亮度值計算出照明色溫的方法。
隨著顏色科學和計算機技術的快速發展,色溫的計算方法在各個方面都獲得了改進與創新。目前比較典型并得到廣泛應用的色溫計算法[12]主要有三角垂足插值法、基于黑體軌跡的Chebyshev法、模擬黑體軌跡弧線法和近似公式法等。因為本設計所選用的單片機計算資源有限,不能負擔較大的計算量,所以本文在大量比對后,參考了Tamaru等[13]提出的由色品坐標直接求出相關色溫的色溫近似計算公式:
式中x、v為等溫線上任意一點的色品坐標。上述近似公式是通過等溫線交點法得到的最小誤差計算公式。在黑體軌跡上誤差不超過0.7%,黑體軌跡外誤差不超過1.0%。在實際生活中,通常使用3000-7000K的色溫值,因此可以直接把該近似公式應用到本色溫計算系統。
為了提高控制系統的執行效率,本文在系統外計算出目標色溫所對應的LED燈珠亮度值并存儲在系統中,當系統調節照明燈色溫時,通過查詢數組可以快速地調節PWM波占空比,進而調節兩路LED燈的亮度使其混合出所需的色溫。表1列舉了部分色溫對應的LED燈珠近似功率。
4 系統測試評估
51單片機本身具有較好的穩定性,可以在長時間的使用下完成相應的工作任務。但是單片機芯片本身不能進行多線程運算,而機器學習系統往往會占用較大的時間資源,為了確保控制系統能快速響應處理各個任務,本文對機器學習系統進行了時間復雜度計算、機器學習測試和整體應用測試。
4.1 時間復雜度計算
由于單片機進行一次切比雪夫距離計算需要執行3次8位加減運算,每次加減運算需要占用控制系統3個時鐘周期。通過計算,每執行1次完整的機器學習運算的頻次為:
T(n)= 3n2+ 2n
(6)
其中n為訓練數據組數,由頻次公式可知,當數據組數n為100時,系統需要占用2.5毫秒的時間,當n為1000時,系統需要占用超過0.3s的時間。因此,維持用戶數據的組數在100組內,可以保證系統具有足夠的響應時間。
4.2 機器學習測試
本文設計開發的K-means機器學習算法,目的是為了簡化操作,使用者僅需要按下開關,即可得到當前環境下最佳的照明光源,無須額外的手動調節。為了確保K-means機器學習算法具有較高的準確性,本文通過MATLAB軟件進行了2次不同樣本數據集的非監督分類運算,MATLAB作為強大的數學軟件,可以快速地分析檢驗算法的性能。
由于本系統是通過冷、暖白光LED燈珠混色技術實現色溫調節,因此,任何一個照度都可以用冷白光LED的亮度和暖白光LED的亮度來表示,在本系統中,存儲的用戶數據集為兩種LED燈珠的亮度。進行MATLAB測試時,采用給定協方差系數生成的隨機數作為訓練數據集,可以實現相同的效果。第一次測試時樣本數據集共30個數據點,設定聚類個數k為3。其分類結果如圖5所示。
圖中橫坐標為冷白光LED燈珠的亮度等級,縱坐標為暖白光LED燈珠的亮度等級,坐標軸上交點為兩色LED燈珠混合成的照度,坐標軸中空心圓點為系統計算出的穩定聚類中心,即系統通過機器學習算法預測的使用者期望照度。當照明系統開啟時,控制器則根據當前環境光強度選擇合適的期望照度,自動將照明光源調節到使用者期望的照度,使用戶只要打開照明系統,可立即進入工作狀態,簡化操作步驟,提高工作效率。
第二次測試時,選取的樣本數據組數為60組,聚類個數K值設為3,所得結果如圖6所示。
由matlab對比測試結果可得,根據已有的樣本數據集,K-means機器學習算法可以很好地計算出聚類中心。從圖中可以明顯看出,空心原點的位置基于上處于樣本數據的中心位置,因此所得聚類中心具有較高代表度,可以代表使用者所需的期望照度。同時樣本數據越多,計算精度越高,照明系統可以根據不同場合的要求選擇存儲不同數量的使用者樣本數據。綜上,本文使用K-means機器學習算法作為感知學習使用者習慣的核心系統,可以很好地滿足系統整體設計的需要。
4.3 整體應用測試
本文為了驗證照明系統是否具有較高實用性與穩定性,對照明系統進行多應用場景下的實際測試。在初次使用時,打開開關,OLED屏會點亮并播放開機動畫,LED燈珠會平滑亮起至預先設置的亮度,此過程中,人眼對其亮度變化的直觀感受較為舒適,不存在光源閃動的現象。當使用者遠離照明燈3m時,照明燈上安置的人體傳感器在一段時間內檢測不到周圍人體所發出的紅外線時,照明燈會自動將亮度調至較低水平,即最大亮度的10%;當周圍有人靠近時,照明燈會恢復至原先的照度。在按鍵測試環節,測試人員按下按鍵,系統可以即時響應,顯示屏會同步顯示調節后的亮度及色溫,沒有明顯的延遲現象,滿足實用性與較高穩定性的設計要求。
5 結束語
本文介紹了一種基于機器學習的自然調光LED照明系統,經過多角度的理論分析和實驗測試,設計總體上達到了穩定性及性能的需求。本設計對算法及硬件框架進行了深度優化,將本來運行在高性能計算機中的機器學習算法移植到低功耗的嵌入式平臺中,在保證功能性的前提大幅降低成本。本系統同時具有極高的擴展性,通過提高供電電壓并加裝輔助散熱系統即可驅動更大功率的照明系統,滿足從家用小型照明燈到醫用級調光無影燈的大范圍應用場景,為其提供低成本、高效能的照明控制系統解決方案。
由于本設計選用的單片機芯片計算資源較少,無法存儲更多用戶數據以便更精確的分析使用者的使用習慣。因此在實際的應用中,如果需要深度分析使用者的行為模式,可以加裝額外的存儲芯片或者使用運算資源更多的處理核心。
參考文獻:
[1]王聲學,吳廣寧,蔣偉,等.LED原理及其照明應用[J].燈與照明,2006,30(4):32-35.
[2]石路.光源色溫對人體生物節律和體溫調節的影響[J].人類工效學,2006,12(3):53-55,59.
[3] Moreno l,Contreras U.Color distribution from multicolor LEDarrays[J].Optics Express, 2007,15(6):3607.
[4]徐代升,陳曉,朱翔,等.基于冷暖白光LED的可調色溫可調光照明光源[J].光學學報,2014,34(1):218-224.
[5] Ying S P,Tang C W,Huang B J.Charaterizing LEDs for mix-ture of colored LED light sources[Cl//2006 International Con-ference on Electronic Materials and Packaging,December 11-14, 2006. Kowloon, China. IEEE, 2006.
[6]凌六一,伍龍,基于軟件模擬的51單片機llC總線的實現[Jl.電子技術,2004,33(5):13-16.
[7]公文禮.大功率LED燈具電源驅動的分析與研究[J].燈與照明,2009,33(4):29-32,53.
[8]王紀永,王建平.基于兩通道PWM的LED調光調色方法[Jl.光電工程,2012,39(7):132-136.
[9]于劍.機器學習[M].北京:清華大學出版社,2017:69-76.
[10]程艷云,周鵬.動態分配聚類中心的改進K均值聚類算法[J].計算機技術與發展,2017,27(2):33-36,41.
[11] Martin Kykta,代永平.高清顯示中的伽馬校正、亮度和明視度探索[Jl.現代顯示,2009(12):13-18.
[12]張浩,徐海松.光源相關色溫算法的比較研究[J].光學儀器,2006,28(1):54-58.
[13]S Tamaru,Y Ohno,T Matsuba, et al.. Measurements of colourtemperature:a simple and reliable method[J].J IlluminatingEngineering Institute of Japan,1981. 65(4):158-162.
【通聯編輯:梁書】
收稿日期:2019-11-21
作者簡介:李巒(1998-),男,江蘇泗洪縣人,2016級電氣與自動化工程學院學生,主要研究方向為嵌入式開發;通訊作者:王小英 (1975-),女,江西波陽人,工學博士,常熟理工學院電氣與自動化工程學院,副教授,IEEE計算機協會會員,主要研究方向為嵌入式系統應用、計算機網絡等。
猜你喜歡
電子技術與軟件工程(2016年22期)2016-12-26 21:36:42
時代金融(2016年27期)2016-11-25 17:51:36
科教導刊(2016年26期)2016-11-15 20:19:33
活力(2016年8期)2016-11-12 17:30:08
科學與財富(2016年28期)2016-10-14 21:19:17
電腦知識與技術(2016年20期)2016-08-19 18:49:49
電腦知識與技術(2016年12期)2016-06-14 00:45:31
科教導刊·電子版(2016年10期)2016-06-02 19:17:03
科教導刊·電子版(2016年10期)2016-06-02 18:04:11
電腦知識與技術(2016年3期)2016-04-07 16:12:55
