高速列車吊弦沖擊動(dòng)力特性的仿真研究
2020-04-24 10:56:08陳友均陽光武肖守訥薛弼一何春天
機(jī)械制造與自動(dòng)化 2020年2期
陳友均,陽光武,肖守訥,薛弼一,何春天
(西南交通大學(xué) 牽引動(dòng)力國家重點(diǎn)實(shí)驗(yàn)室,四川 成都 610031)
0 引言
列車的研發(fā)一直朝著高速、安全舒適的方向發(fā)展。高速列車大多使用電機(jī)牽引,采用這種方式時(shí)必須考慮供電系統(tǒng)的可靠性。由于吊弦的斷裂導(dǎo)致供電故障的頻繁發(fā)生,所用吊弦沖擊載荷對列車行駛的安全性變得非常突出。輪軌關(guān)系和弓網(wǎng)耦合關(guān)系被法國、德國和日本等發(fā)達(dá)國家的科學(xué)家認(rèn)為有著同樣重要的位置。因此吊弦沖擊動(dòng)力的研究對于鐵路運(yùn)輸有重要的意義[1]。
本文針對現(xiàn)有吊弦沖擊動(dòng)力研究中的不足,開展了弓網(wǎng)耦合機(jī)理下的吊弦動(dòng)力學(xué)研究,通過建立高速弓網(wǎng)耦合動(dòng)力學(xué)模型,對高速鐵路吊弦沖擊狀態(tài)進(jìn)行了動(dòng)態(tài)仿真分析。
1 接觸網(wǎng)結(jié)構(gòu)類型和建模方法
國內(nèi)外鐵路接觸網(wǎng)的懸掛結(jié)構(gòu)形式基本上可分為如圖 1所示的3種主要類型:(a)為德國采用的彈性鏈形懸掛,(b)為法國采用的簡單鏈形懸掛,(c)為日本采用的復(fù)鏈形懸掛,其中圖中的接觸網(wǎng)兩端和中間有圖2所示的定位桿和腕臂支撐結(jié)構(gòu)[2]。
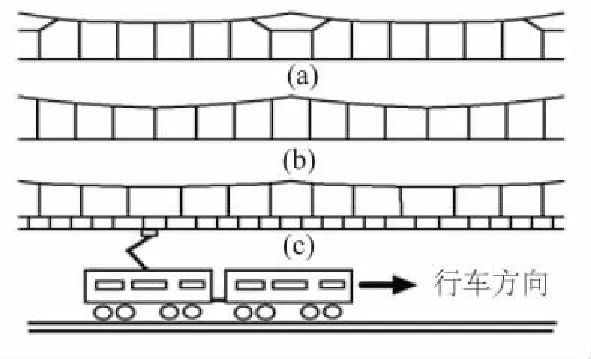
圖1 3種接觸懸掛類型

圖2 腕臂和定位器
1.1 接觸網(wǎng)的數(shù)值建模方法
接觸網(wǎng)的建模從最初的變剛度模型發(fā)展到現(xiàn)在的歐拉梁模型、張力弦模型、集中質(zhì)量模型和與頻率有關(guān)的有限元模型等,模型越來越復(fù)雜[3]。本文用2節(jié)點(diǎn)的歐拉伯努利梁模型對承力索和接觸線進(jìn)行建模。材料彎曲剛度,張力作用被考慮到承力索和接觸線的建模中。


圖3 接觸線微段力和力矩平衡圖
由力的平衡建立接觸線微段的力平衡方程:
由力矩的平衡建立接觸線微段的力矩平衡方程:
聯(lián)立以上兩式可得接觸線微段的振動(dòng)方程:
接觸線假設(shè)近似平行,即斜率非常小,接觸線兩端的張緊力為恒定值,其中,ρc代表接觸線的線密度,vc代表接觸線相對平衡位置的位移,cc代表接觸線阻尼值,EIc代表彎曲剛度,Tc代表張緊力,δ(x)代表x=0時(shí)的狄拉克函數(shù),fre代表定位器的力,fdr代表吊弦的作用力,fc(t)代表弓網(wǎng)之間的接觸力,ndrop代表吊弦的數(shù)量,nreg代表定位器的數(shù)量,xi代表第i根吊弦的位置,t和V分別代表列車的運(yùn)行時(shí)間和車速。
1.2 接觸網(wǎng)的有限元建模方法
在對接觸網(wǎng)、吊弦和承力索進(jìn)行數(shù)值分析建模時(shí),因其結(jié)構(gòu)復(fù)雜,在建模時(shí),對接觸網(wǎng)的實(shí)體結(jié)構(gòu)在一定程度上進(jìn)行簡化。歸算質(zhì)量是受電弓的重要參數(shù),因歸算質(zhì)量是根據(jù)動(dòng)能相等的原理計(jì)算的,模型的簡化會(huì)引起歸算質(zhì)量偏差,從而使線纜中能量傳遞的失真。為了消除這種簡化的影響,讓結(jié)果更加準(zhǔn)確描述弓網(wǎng)接觸和振動(dòng)傳遞,把有限元模型運(yùn)用到現(xiàn)實(shí)的仿真研究中來解決弓網(wǎng)之間的復(fù)雜耦合關(guān)系,并逐漸演化為全柔性弓網(wǎng)接觸模型[5]。
本文根據(jù)接觸網(wǎng)振動(dòng)方程,接觸網(wǎng)主要零部件所采用的單元類型如表 1所示。
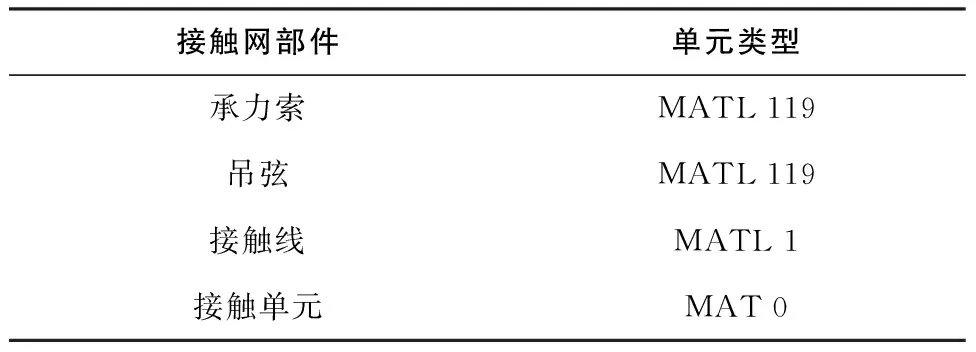
表1 接觸網(wǎng)主要零部件單元類型
在弓網(wǎng)之間建立接觸時(shí),為了避免在接觸時(shí)出現(xiàn)負(fù)體積而使計(jì)算錯(cuò)誤,在接觸線的表面附加薄殼單元MAT 0,用于建立節(jié)點(diǎn)與節(jié)點(diǎn)間的接觸。由于這種殼單元的厚度極薄,實(shí)際上在建立接觸時(shí),這種單元只起到連接作用,在仿真分析過程中不對結(jié)果產(chǎn)生影響。
根據(jù)吊弦線和承力索的實(shí)際工作情況,不具有線性拉壓特性,且壓縮剛度非常小,兩端承受壓縮載荷作用時(shí)不承受力的作用,所以用MATL 119這種單元來模擬吊弦和承力索是合適的,此外,這種單元可以根據(jù)試驗(yàn)數(shù)據(jù)分別定義加載和卸載曲線[6]。同時(shí)在進(jìn)行顯示動(dòng)力學(xué)分析之前,初始重力會(huì)作用于大多數(shù)的結(jié)構(gòu)中。重力作用響應(yīng)時(shí)間在大剛度結(jié)構(gòu)中可以不考慮,但對于索網(wǎng)結(jié)構(gòu),重力會(huì)對索網(wǎng)結(jié)構(gòu)的初始形態(tài)產(chǎn)生影響。為減少重力對初始形態(tài)的影響[7],本文在接觸線受到受電弓作用前設(shè)置2 s虛加時(shí)間段,且為使在受電弓作用前,接觸線能夠達(dá)到平衡狀態(tài)和懸掛高度在規(guī)定范圍內(nèi),施加圖4所示的接觸線高度修正力。
圖4所示為修正接觸線懸掛高度前后接觸懸掛點(diǎn)的高度示意圖,虛線和實(shí)線分別為重力作用下施加修正力前后接觸線形態(tài)。若以EN50318對接觸線施工質(zhì)量進(jìn)行評(píng)價(jià),接觸線高度范圍如表 2所示。
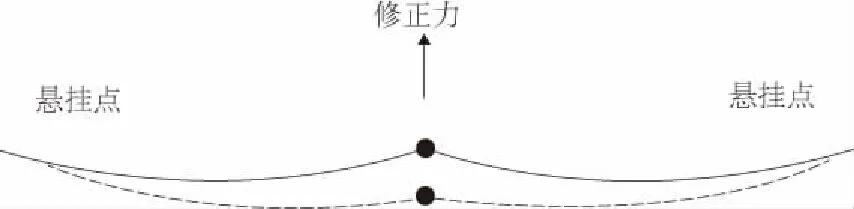
圖4 吊弦位置預(yù)配修正
表2 接觸線導(dǎo)高允許幾何偏差表 單位:mm

參數(shù)接觸網(wǎng)(250 km/h)接觸網(wǎng)(300 km/h)接觸線高度±30±30定位高度差±20±20
圖5是考慮支柱定位和彈性補(bǔ)償條件下接觸線的邊界條件示意圖,這也是進(jìn)行有限元分析的起始條件。表3為承力索和接觸線的彈性補(bǔ)償力,另外應(yīng)考慮圖6所示吊弦的非線性張力伸長量的變化關(guān)系。
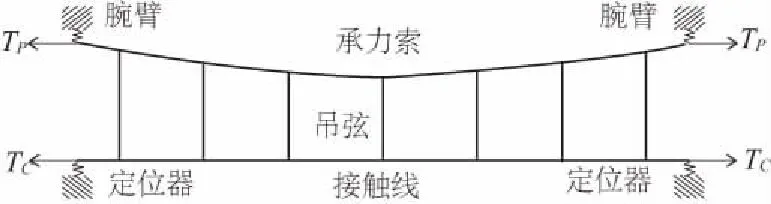
圖5 簡單鏈形懸掛
表3 接觸線、承力索張力和單位長度質(zhì)量
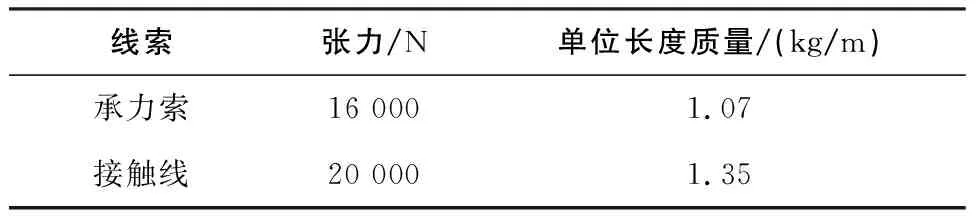
線索張力/N單位長度質(zhì)量/(kg/m)承力索16 0001.07接觸線20 0001.35
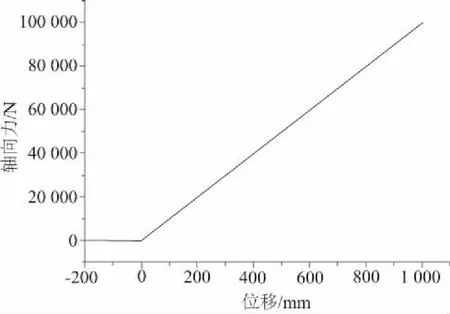
圖6 吊弦非線性張力長度變化曲線圖
2 受電弓的建模方法
受電弓實(shí)際弓網(wǎng)作用狀態(tài)如圖7所示,受電弓主要由上導(dǎo)桿、下導(dǎo)桿、上框架、下框架、滑板5個(gè)部分組成,一般采用歸算質(zhì)量模型。

圖7 弓網(wǎng)作用實(shí)際作用圖
將受電弓簡化為二質(zhì)量的受電弓,如圖8所示。參考受電弓的設(shè)計(jì)參數(shù),把受電弓的弓頭、上框架和下框架等效為歸算質(zhì)量模型。
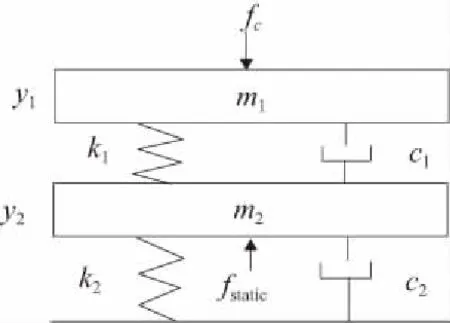
圖8 二質(zhì)量受電弓
根據(jù)圖8可得到二質(zhì)量的動(dòng)力學(xué)方程:
本文所采用的受電弓質(zhì)量塊-彈簧-阻尼歸算模型[8],將參照EN50318中的標(biāo)準(zhǔn)參數(shù),如表4所示。
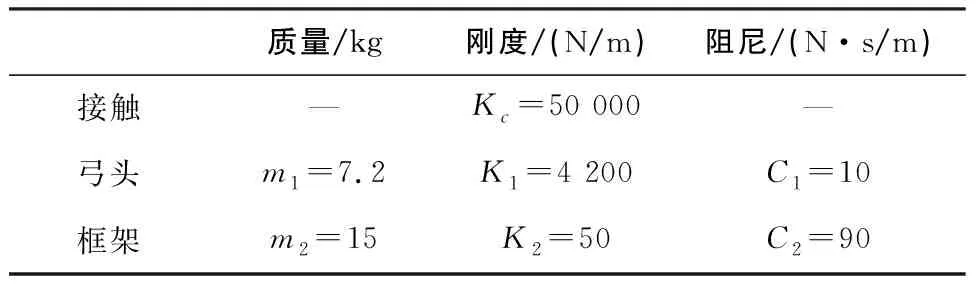
表4 二質(zhì)量受電弓參數(shù)
3 吊弦動(dòng)力學(xué)仿真分析
根據(jù)弓網(wǎng)系統(tǒng)組合,利用系統(tǒng)質(zhì)量的剛度關(guān)系,在LS-DYNA中建立接觸網(wǎng)和受電弓的接觸有限元?jiǎng)恿W(xué)模型,如圖9所示。
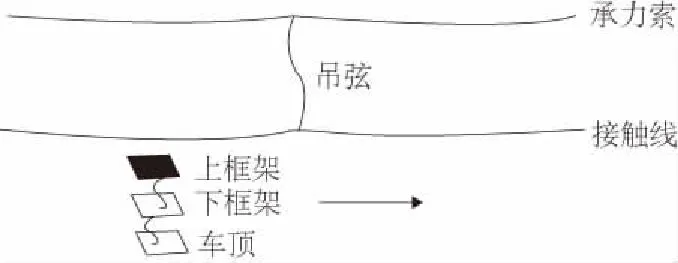
圖9 接觸有限元?jiǎng)恿W(xué)模型示意圖
受電弓通過受電弓框架連接在車頂,接觸網(wǎng)在兩端通過彈性定位器和腕臂連接在支柱兩點(diǎn)。受電弓弓頭碳滑板相對于接觸網(wǎng)接觸線是滑動(dòng)接觸系,其相對運(yùn)動(dòng)速度和摩擦力關(guān)系為ff=FD+(FS-FD)e-DC|v|,其中DC、FD和FS分別為指數(shù)衰減系數(shù)、動(dòng)摩擦因數(shù)、靜摩擦因數(shù)。當(dāng)速度v提高的時(shí)候,ff=FD,即越接近于動(dòng)摩擦力;而當(dāng)v=0時(shí),ff=FS,越接近于靜摩擦力。以標(biāo)準(zhǔn)EN50318中給定的驗(yàn)證條件為基礎(chǔ),對該系統(tǒng)運(yùn)行速度為250km/h的列車進(jìn)行仿真驗(yàn)證得到結(jié)果如表5所示[4]。
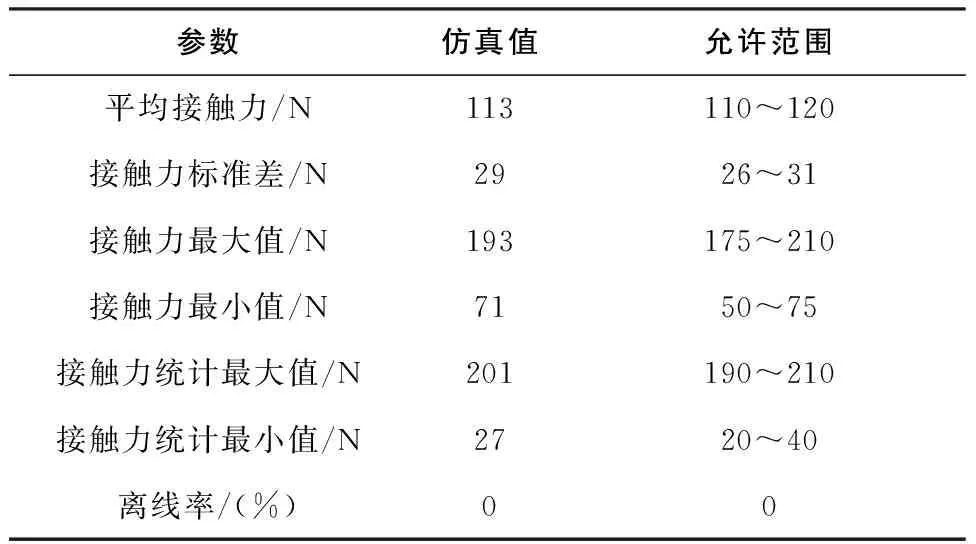
表5 驗(yàn)證模型參數(shù)對比
3.1 受電弓-吊弦動(dòng)態(tài)作用
圖10為高鐵某段采集到在受電弓作用下,接觸線受沖擊力作用的位移圖。吊弦在受電弓與接觸網(wǎng)相互作用時(shí),受到了弓網(wǎng)沖擊力的作用。受電弓在通過吊弦正下方之前,在垂直方向接觸網(wǎng)有一定的位移,且在受電弓到達(dá)最下端時(shí),接觸線的垂向位移達(dá)到最大,此時(shí)心型鉗環(huán)和線夾吊環(huán)可能會(huì)出現(xiàn)接觸分離。當(dāng)受電弓通過了吊弦下端時(shí),由于張力和重力作用,引起吊環(huán)與鉗環(huán)之間的沖擊作用[9]。

圖10 在標(biāo)注穩(wěn)定線高度下的吊弦沖擊位移圖
3.2 彈性鏈形懸掛的動(dòng)態(tài)性能
由標(biāo)準(zhǔn)載荷試驗(yàn)中得出的吊弦沖擊高度影響沖擊力大小的猜想,現(xiàn)通過本文模型進(jìn)行仿真驗(yàn)證。標(biāo)準(zhǔn)EN50318中規(guī)定弓網(wǎng)靜態(tài)接觸力分別為120N、60N和30N,此時(shí)在車輛運(yùn)行速度為250km/h、弓頭質(zhì)量為7.2kg和接觸線張緊力20000N,且條件不變化的情況下,通過改變弓網(wǎng)靜態(tài)接觸力來實(shí)現(xiàn)對于接觸線抬升量的調(diào)整,并驗(yàn)證抬升量對于吊弦沖擊力的大小有較為重要的影響和作用。分別以3號(hào)吊弦和5號(hào)吊弦為例提取其沖擊力的變化。
圖11為靜態(tài)接觸力為120N時(shí)的振動(dòng)載荷圖,由圖看出3號(hào)吊弦先由軸向拉伸變?yōu)檩S向壓縮,且在壓縮完成后隨著接觸線回落到起始位置,在0.23s時(shí)吊弦力達(dá)到最大,為191.5N,并隨時(shí)間振動(dòng)逐漸變小。
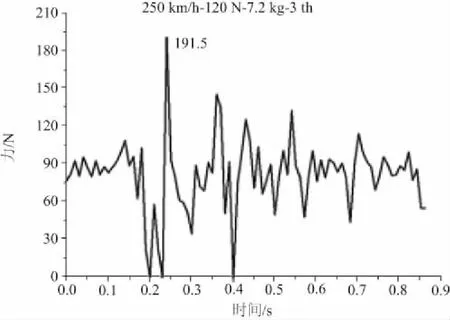
圖11 3號(hào)吊弦振動(dòng)載荷圖(120 N)
圖12為靜態(tài)接觸力為120N時(shí)的振動(dòng)載荷圖,由圖看出5號(hào)吊弦先由軸向拉伸變?yōu)檩S向壓縮,且在壓縮完成后隨著接觸線回落到起始位置,在0.44s時(shí)吊弦力達(dá)到最大,為141.2N,并隨時(shí)間振動(dòng)逐漸變小。
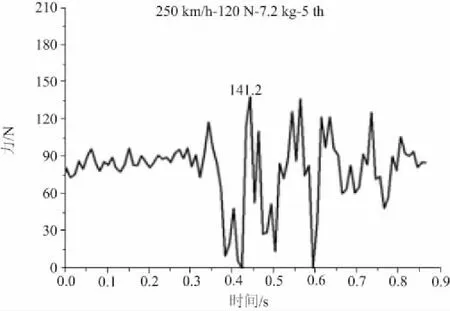
圖12 5號(hào)吊弦振動(dòng)載荷圖(120 N)
圖13為靜態(tài)接觸力為60N時(shí)的振動(dòng)載荷圖,由圖看出3號(hào)吊弦先由軸向拉伸變?yōu)檩S向壓縮,且在壓縮完成后隨著接觸線回落到起始位置,在0.23s時(shí)吊弦力達(dá)到最大,為135.3N,并隨時(shí)間振動(dòng)逐漸變小。
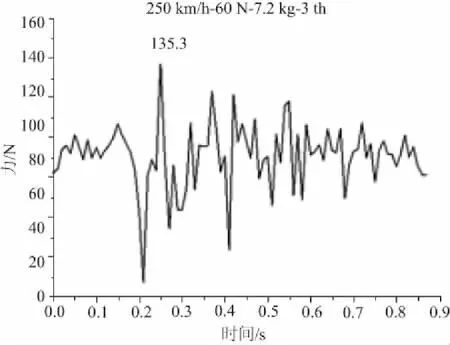
圖13 3號(hào)吊弦振動(dòng)載荷圖(60 N)
圖14為靜態(tài)接觸力為60N時(shí)的振動(dòng)載荷圖,由圖看出5號(hào)吊弦先由軸向拉伸變?yōu)檩S向壓縮,且在壓縮完成后隨著接觸線回落到起始位置,在0.44s時(shí)吊弦力達(dá)到最大,為125.0N,并隨時(shí)間振動(dòng)逐漸變小。
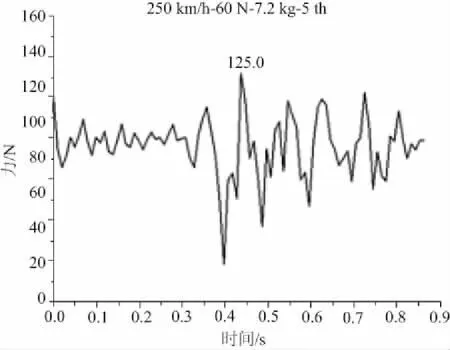
圖14 5號(hào)吊弦振動(dòng)載荷圖(60 N)
圖15為靜態(tài)接觸力為30N時(shí)的振動(dòng)載荷圖,由圖看出3號(hào)吊弦先由軸向拉伸變?yōu)檩S向壓縮,且在壓縮完成后隨著接觸線回落到起始位置,在0.23s時(shí)吊弦力達(dá)到最大,為103.6N,并隨時(shí)間振動(dòng)逐漸變小。
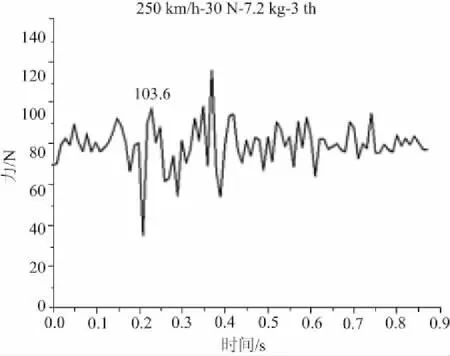
圖15 3號(hào)吊弦振動(dòng)載荷圖(30 N)
圖16為靜態(tài)接觸力為30N時(shí)的振動(dòng)載荷圖,由圖看出5號(hào)吊弦先由軸向拉伸變?yōu)檩S向壓縮,且在壓縮完成后隨著接觸線回落到起始位置,在0.44s時(shí)吊弦力達(dá)到最大,為115.3N,并隨時(shí)間振動(dòng)逐漸變小。
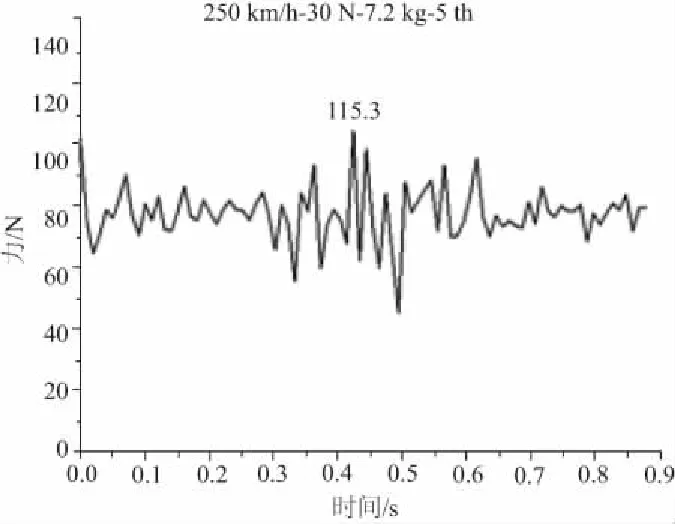
圖16 5號(hào)吊弦振動(dòng)載荷圖(30 N)
由圖17可看出隨著弓網(wǎng)靜態(tài)接觸力的增大,吊弦下末端的抬升高度會(huì)隨之增加,吊弦的沖擊力也隨之增大,此仿真所得到的結(jié)論和王偉[9]在臺(tái)架試驗(yàn)得出的結(jié)論具有一致性,證明本文仿真結(jié)果的正確性。在本文所采用的弓網(wǎng)靜態(tài)接觸力的仿真范圍內(nèi),吊弦所承受的最大沖擊力值相對于靜態(tài)接觸力值呈線性增加的狀態(tài)。由以上仿真結(jié)果可得靜態(tài)接觸力的增加會(huì)增加吊弦的抬升高度,從而增加吊弦最大沖擊力的大小,且存在一定的線性關(guān)系。
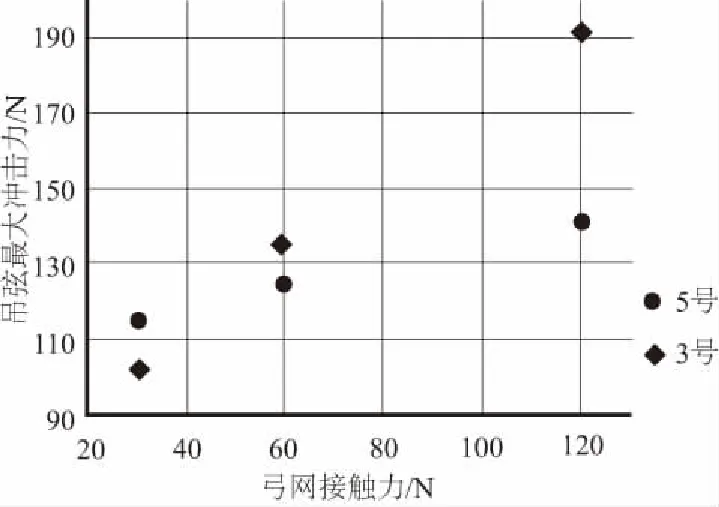
圖17 不同位置吊弦的沖擊力
4 結(jié)語
通過參考解析數(shù)值分析方法中接觸線和受電弓的定義分析方式,在軟件LS-DYNA中建立起弓網(wǎng)接觸作用的模型,并進(jìn)行了吊弦的沖擊載荷分析,能夠得到以下結(jié)論:
1) 基于解析計(jì)算方法的弓網(wǎng)接觸模型可以用于計(jì)算弓網(wǎng)的接觸分析。
2) 隨著靜態(tài)接觸力的減小,吊弦沖擊力的變化范圍明顯變窄,峰值和谷值都在向靜態(tài)軸向力附近靠近。
3) 通過對3種不同大小的靜態(tài)接觸力獲得的吊弦沖擊力進(jìn)行對比,可知隨著靜態(tài)接觸力的增大吊弦的沖擊力也增大。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
