應用于水下微型潛器的導電滑環結構設計
2020-04-24 10:56:04姜凱李建偉高凡
機械制造與自動化 2020年2期
姜凱,李建偉,高凡
(青島理工大學 琴島學院,山東 青島 266106)
0 引言
隨著人類科學文明的進步,水下場景探測、資源勘察等方面的技術亟需發展。水下微型潛器的設計目前仍處于起步階段,在許多關鍵技術點上,依然面臨設計難點。在微型潛器連接線這個關鍵結構上,主流設計采用的是剛性連接,無法實現微型潛器水下無位移旋轉動作,并且數據信息傳輸不穩定,極大地限制了微型潛器的運動性能。本文針對這一技術難點,設計了一種導電滑環結構,旨在解決如何提高水下潛器移動靈敏性的問題,同時可提高設備的使用壽命。
目前市場上主流的導電滑環根據環的分布不同可分為軸式、盤式、差動式3大類。 軸式滑環中的環面沿軸向分布,由多個環堆疊起來,環與環之間通過絕緣片隔離。此類滑環可靠性高、結構簡單、成本低,但體積較大。盤式滑環的轉子通過多圈同心圓環來承載電流和信號,同心圓環之間用絕緣物質隔離,電刷作為定子分布在同心圓環的頂部。此類滑環體積小,但結構復雜、成本較高、工藝要求高。差動滑環通過差動結構,使用環芯來導通上、下兩層相對轉動的觸點。此類滑環體積小、有限空間可提供的通路數多,但環芯的制作難、內部結構極其復雜、成本高。針對微型潛艇應用環境條件的特點,本文在潛艇接線處設計了一種連接穩定、體積小、結構簡單的導電滑環。經過方案論證,導電滑環位于潛艇底部,并處于質心線與機體下表面的交匯處。導電滑環中的滑動軸承結構直接與連接線進行固定連接(在滑動軸承內部,連接線與滑動軸承上的凸起觸點直接固定連接)。套筒與滑動軸承通過C形滑環[1]滑槽嚴密地扣合,當潛艇旋轉時,固定于潛艇頂部的套筒與固定連接于連接線的滑動軸承發生相對轉動。套筒結構中設計有2個滑槽,定子結構直接位于滑槽內部。每當潛艇旋轉時,滑動軸承上的凸起觸點在滑槽內部滑動轉動,與滑槽內部的定子直接接觸發生相對轉動同時實現電路連接,使潛艇在轉向定位時不會受到連接線的扭轉力,獲得了較高的靈活機動性能,同時也不會對有線的連接處造成損壞[2-3]。凸起觸點通過滑槽穩定地與定子接觸,保證了電信號的穩定傳輸,實現了數據的穩定輸送[4]。
針對潛艇在水下的應用環境,通過三維建模,繪制模擬出了潛艇整體的三維立體結構。對產品外部構造、內部構造進行設計研發,三維建模如圖1所示。
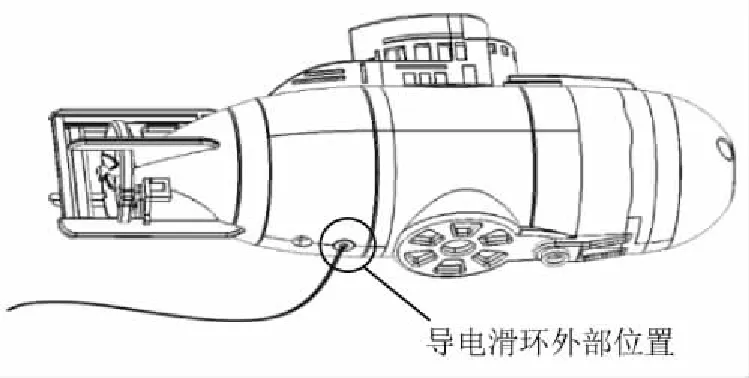
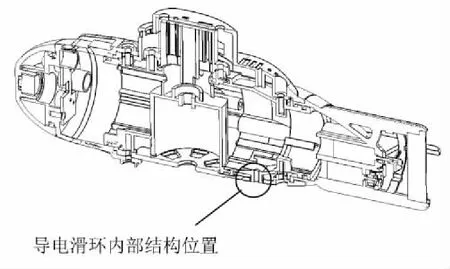
圖1 三維結構
1 導電滑環的結構設計
1.1 導電滑環整體的結構設計
本設計位于連接線與潛艇的連接部分,在該連接處采用導電滑環結構。該結構主要由滑動軸承和套筒兩部分組成,用于潛艇供電及數據傳輸的同時,解決了連接線和滑動軸承由于剛性連接降低水下微型潛艇活動靈活性的難題。
連接線連接在固定軸承上(圖2),在前全剖視圖中可直觀地看出,連接線直接與滑動軸承上的凸起觸點固定連接,套筒與潛艇的底部固定連接。潛艇在運動轉向時,導電滑環結構能夠實現連接線與滑動軸承靜止不動,潛艇圍繞固定軸承自由無限制地旋轉。在局部剖圖處,旋轉密封結構采用C形滑環滑槽組合相扣的密封處理方法。由于潛艇在正常工作時,滑動軸承與套筒相對轉動的轉速極小,故在套筒與固定軸承之間,對導電滑環實行油封。
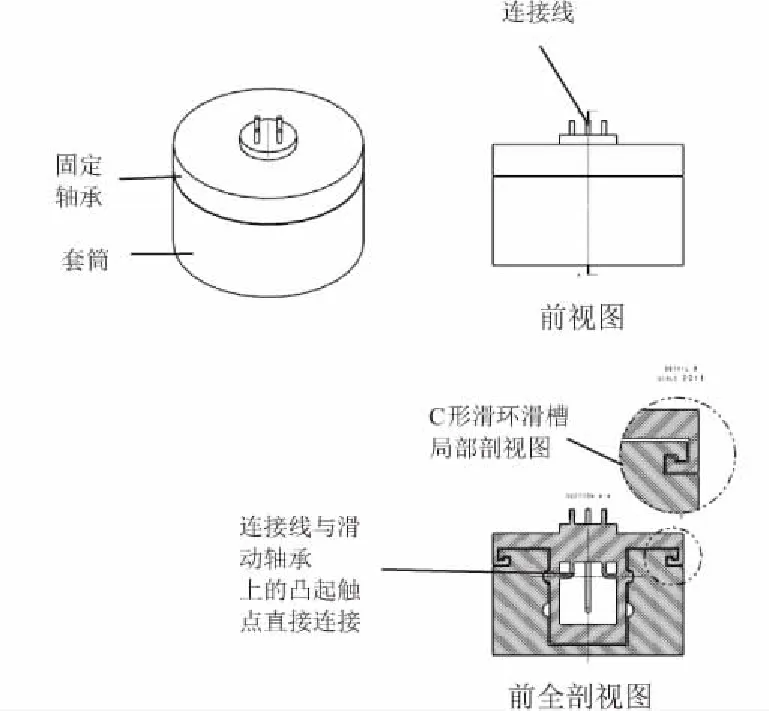
圖2 導電滑環整體結構設計
1.2 滑動軸承接線結構設計
在滑動軸承上側,連接線與滑動軸承固定連接。在滑動軸承內部,4根連接線分別與4個凸起觸點直接連接固定。滑動軸承分別在1、2兩個平面上各有2個凸起球觸點均勻分布,保證質心在軸承圓心處,保證了潛艇在旋轉時的穩定性。如圖3所示。
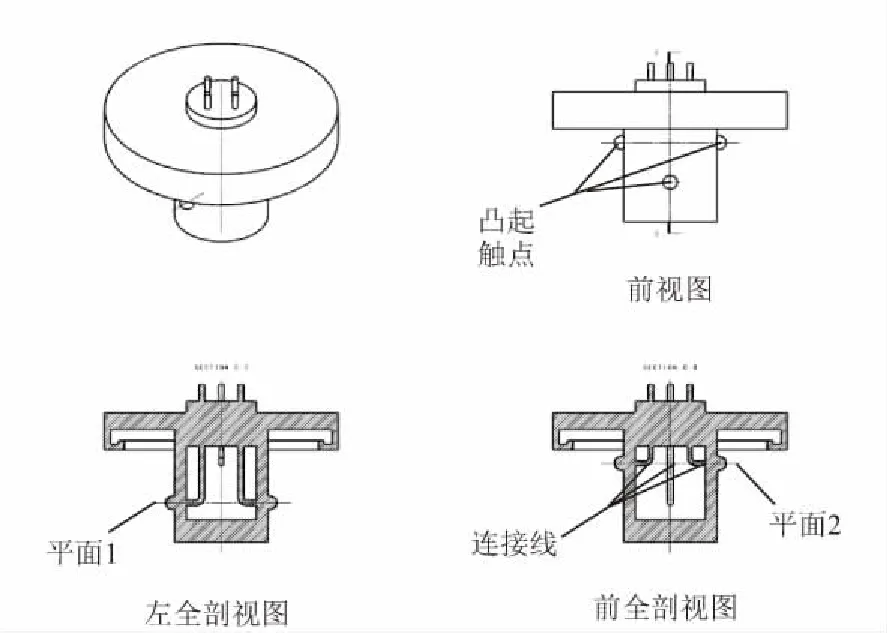
圖3 導電滑環的滑動軸承結構
1.3 套筒結構的設計
套筒結構內部有2個滑槽。潛艇運動轉向時,由于凸起觸點在滑槽內的滑動,使滑動軸承與套筒發生相對轉動,其中凸起觸點總是與軸承式套筒內壁的定子直接接觸發生相對滑動,既保證了其信息傳輸的實時性,又保證了穩定性。套筒的內部構造要求有良好的密封性,為了防止套筒進水,在套筒內部塞滿油脂,如圖4所示。
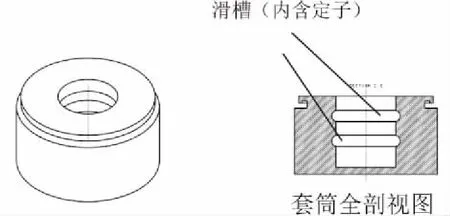
圖4 導電滑環的套筒結構
2 相對損耗下導電滑環的壽命計算
當微型潛艇在水中工作,只有潛艇轉向時,導電滑環才會發生相對轉動進行實際工作,故潛艇該處結構每天最多實際工作時間遠低于潛艇的工作時間,約3.5h,且實際應用場景所要求導電滑環的轉速極低,約10r/min。導電滑環旋轉的總圈數約6500000r。在滑動軸承和套筒旋轉時,軸承上的凸起觸點和套筒上的定子直接接觸發生相對運動,由于接觸摩擦產生微量的損耗[5],損耗量可以通過測量體積得到。為了保證導電滑環在水下微型潛艇中正常工作時的使用壽命[6]能夠達到基本要求,轉子的損耗量必須控制在一定范圍之內,定子與轉子之間為點接觸且充滿油脂,起潤滑作用,相對摩擦極小。
(1)
式中:k是導電滑環正常工作條件下的工作年限[7];ΔP是每個定子的質量可損耗范圍(1.9 g≤ΔP≤2 g);ε是滑動軸承每天相對旋轉的圈數(ε≤2000r/d);ω是定子每旋轉1圈所消耗的質量(ω=0.3μg/r)。
(2)
式中:kmin是導電滑環最短的工作年限范圍;εmax是滑動軸承與套筒平均每天發生旋轉的最多圈數(取導電滑環的日平均旋轉圈數為εmax=2000r/d)。若要校核計算導電滑環的最短工作年限[7],根據微型潛艇在水中的特殊應用場景,設導電滑環的日平均極限工作狀態為εmax=2000r/d,則通過校核計算滑環正常工作,得微型潛艇使用年限最短的范圍kmin=8.7~9.1年,滿足水下微型潛艇的年限使用要求。
3 實體產品結構設計
針對導電滑環在潛艇中的結構設計要求,導電滑環的位置對微型潛艇的穩定性影響、導電滑環的密封性處理、潛艇實際工作深度試驗驗證這3個方面對潛艇實際產品的可行性有直接影響。
1) 對微型潛艇整體的穩定性做相應的優化設計,滑環結構位于微型潛艇底部質心處,導電滑環頂部的滑動軸承結構與連接線直接固定連接,大大降低了連接線對潛艇的牽引力,避免了連接線對潛艇靈敏運動的嚴重干擾。
2) 針對微型潛艇的工作水域體積和下潛深度,考慮到微型潛艇的電機驅動功率和下潛深度較低的因素,在導電滑環結構滑動軸承與套筒之間加入油脂,對密封性做了調試和檢驗。經過導電滑環的試驗證明,當微型潛艇的下潛極限深度為15m時,潛艇的密封性完全滿足正常實用要求。
3) 對密封及動力部分進行了部分修改,經過改進完善,生產出實物如圖5所示,經過實際水體測試證明,潛艇的水下實際工作最大深度為10~15m。
該微型潛艇可實際應用于水族業、水產養殖業、水下勘探等行業。目前產品通過電源適配器與家用電連接,可以持續操作10h,通過持續操作按鍵可以實現水中懸停、同深度直線潛航、原地360°調轉功能。潛水艇內部設有吸水艙結構進行吸水、排水,已實現垂直方向穩定下潛和上浮運動。項目主要任務已經完成,微型潛艇已經實現搭載視覺及紅外傳感器,通過物聯網信息傳輸技術與用戶手持設備進行交互,并通過Wifi橋接技術并入互聯網。
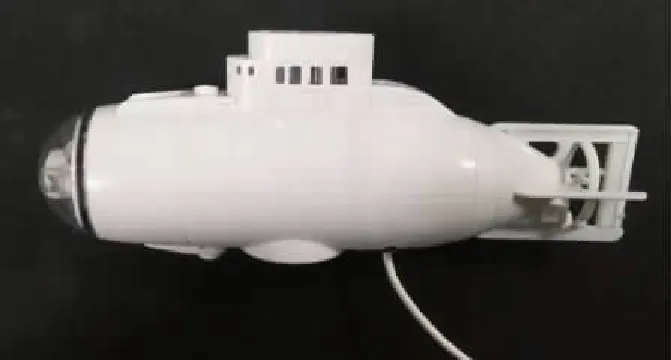
圖5 實體外觀圖
4 結語
經過實驗驗證,基于水下微型潛器的導電滑環結構設計,實現了定位轉動,滿足了水中作業時潛艇無限制旋轉的要求。該設計提高了整體移動的靈活性,增強了信息傳輸的穩定性和高效性,能夠滿足更復雜的水下作業要求,大大提高了水下微型潛器的綜合性能。該水下潛器應用范圍廣、限制低、性能高,具有十分廣闊的市場前景。
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
房地產導刊(2022年5期)2022-06-01 06:20:14
哲學評論(2021年2期)2021-08-22 01:53:34
建材發展導向(2021年13期)2021-07-28 07:15:50
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
專用汽車(2016年5期)2016-03-01 04:14:49
中國房地產業(2016年2期)2016-03-01 01:25:23
中國房地產業(2016年24期)2016-02-16 06:10:22
