智能輔助決策系統在武器站中的研究及應用
2020-04-22 08:31:16李元超毛保全楊雨迎鄭博文
兵器裝備工程學報 2020年3期
李元超,毛保全,楊雨迎,鄭博文
(陸軍裝甲兵學院,北京 100072)
隨著信息化技術的不斷發展,智能化、無人化是未來的戰爭的發展方向。盡可能減少作戰人員直接參與戰斗,提高武器系統火力打擊的快速反應能力和實際作戰效能成為了未來戰爭的特點。武器站是適應未來戰場對陸基武器平臺快速反應和應急機動等多功能要求的新型武器系統[1],它即有適應城市、山地等快速機動作戰和反恐、防暴、維和等低強度作戰的現實需求,又有未來無人化裝備的長遠技術儲備的需求。武器站作為裝甲車載武器的一個新成員,為適應未來戰場的要求,也需要實現自主化、智能化和無人化,智能輔助決策系統將發揮舉足輕重的作用。
1 武器站的發展現狀
1.1 定義及分類
武器站(Weapon Station):指不同武器或武器與觀瞄、控制等不同功能模塊的組合配置。其中,站(Station)強調的是具有獨立功能的平臺(可更換、提供環境)[2]。
武器站按照作戰模式可分為反直升機武器站、反狙擊手武器站、護航軍艦武器站、城市作戰專用武器站等。根據系統控制方式又可分為遙控式武器站、半自主式武器站和自主式武器站。其中半自主式和自主式武器站這種具有一定自主能力的武器站也稱為“智能武器站”,國外稱之為“無人戰車”、“無人作戰平臺”、“地面無人自主系統”等。
1.2 國外研究現狀
目前國外許多部隊都裝備有各種功能多樣、結構不同的遙控武器站。如美軍的M19式40毫米自動榴彈發射器的XM101通用遙控武器站、M240型7.62毫米機槍XM101通用遙控武器站(如圖1所示),英軍的“強制者”武器站,以色列遙控武器站(RCW-30)等等。

圖1 XM101通用遙控武器站
這些武器站主要特點有:① 結構設計模塊化,不僅能夠安裝多種武器,還能安裝不同的傳感器組;② 自動化程度較高,射手完成對目標測距后,火控計算機會自動裝定射擊諸元并調轉武器到位,通過分離式瞄準線系統,還能實現不同彈道特性武器的自動瞄準[3];③ 射擊穩定性好,通過運用減震穩定系統,能夠確保車輛行駛和武器發射過程中準確地進行觀瞄和射擊。
隨著技術的進步和未來作戰的需求,美國首先開始研究地面無人戰車。在伊拉克戰爭期間,美國就開始利用“利劍”(Swords)機器人對無人戰車實戰應用能力進行測試。其打擊模塊含M249型5.56 mm班用自動機槍、M240型7.62 mm機槍和巴雷特M82A1型12.7 mm半自動步槍以及40 mm榴彈發射器和多發噴火武器,無線電控制距離達1 km,在實戰運用中取得了很好的效果。
目前國外典型的地面無人戰車還包括美國“破碎機”無人戰車、“粗鋸齒”無人戰車、ARPA無人戰車、俄羅斯“天王星”-9履帶式無人戰車和以色列“前衛”無人戰車等,這些都可以統稱為智能武器站。
智能武器站是未來武器站的發展趨勢,也是國外現在發展的熱點,相比傳統遙控武器站具有自主水平更高、遠程操縱能力更強的優勢,可以自主地對目標進行搜索、識別和攻擊,還具有感知和預判能力、記憶和思維能力、學習能力以及行為決策能力等特點[4]。
1.3 國內研究現狀
在“十五”和“十一五”期間,國內光電信息技術、光電信息與輕武器融合技術得到了快速發展[5],武器站的關鍵技術也實現了突破。許多科研所和軍工廠開展了相關技術的研究工作,先后進行了通用遙控武器站、班組綜合作戰系統、機槍和榴彈發射器遙控武器站、輕型防空反導武器系統、以及小型遙控武器站等的研制。
相比國外先進武器站,目前國內武器站還存在以下問題:① 自主能力低,完全靠人直接操控所有的任務功能;② 動態射擊穩定性差,連發射擊精度和射擊密集度低;③ 有線遙控距離有限,主要依靠人在車體內操作判斷;④ 目標搜索和武器調轉速度較慢,同時受限于人眼判別能力,往往無法及時發現快速移動的目標及失散的多目標。
為解決上述問題,當前國內開始研制一些無人作戰平臺,在第十屆中國珠海航展陸戰裝備展區亮相了兩款陸戰遙控無人作戰平臺(如圖2所示),其作戰技術性能處于國內先進水平,主要用于執行偵察和作戰任務。
這些無人作戰平臺,雖然已具備一定的自動化和數字化作戰能力,但是根據美國陸軍未來作戰系統(FCS)自主水平標度[6],它們多處于“認可管理模式”的二級水平,系統針對選定的功能自主推薦行動,屬于半自主式武器站。
因此,要實現自主水平很高的智能武器站,必須在信息處理技術、偵察探測技術、目標獲取技術、無線通信技術、智能輔助決策技術等方面進一步加強研究,尤其需要智能輔助決策系統的應用,使計算機不僅可以提供全套的決策和動作選擇方案,輔助人工決策,也可以逐步獨立決定所有事情,自主工作,代替人工決策。
2 武器站智能輔助決策系統的特點、原理和關鍵技術
2.1 特點
武器站智能輔助決策系統是通過一系列知識處理方法來獲取軍事領域專家的知識和經驗,并運用知識建模方法與語言,將知識結構化,形成決策知識庫,然后采用合理的知識服務策略,根據特定的使命任務、戰場環境和個性化知識需求進行智能推理和演繹過程的系統[7]。主要有以下特點:
1)對目標智能識別、跟蹤的數據進行分析處理,實現對多個目標威脅判斷和排序;
2)根據目標的威脅評估結果,對敵方的戰術意圖和行為進行預測,實時輸出火力打擊決策預案;
3)通過評估目標毀傷效果[8],輔助遠程操控人員完成對戰場態勢的理解,實時輸出輔助決策結果;
4)通過自學習系統標注人工決策過程,不斷提高智能輔助決策準確性和效率。
2.2 工作原理
打擊目標的智能化輔助決策是一個涉及戰場環境、行動企圖、敵情等多方面因素的復雜問題,系統會在對敵目標進行核實的基礎上,進行科學合理的分析判斷,其工作原理如圖3所示。
首先系統通過觀瞄設備(或其他傳感器)來搜索對地或者對空目標,通過感知設備獲取戰場的環境信息,生成結構化的處理數據,其中包括目標屬性、目標的類型、目標的運動特性等;隨后這些數據傳遞到綜合信息接口及處理模型并傳送自學習系統,來進行決策模型的學習。
系統通過分析各類目標在體系作戰中的關鍵作用、相互聯系和依存關系及對我作戰行動的威脅程度,來進行威脅的判斷,確定目標的價值,對于威脅程度大的目標首先進行打擊;通過分析目標的機動能力、外部形態、薄弱部位、隱蔽性、防護程度和毀傷要求,確定目標的抗毀性,以此來選擇武器的類型,對于地面撞見目標來說將選擇導彈/榴彈來進行打擊,對于集群目標將采用榴彈/機槍來進行打擊,對于低空目標將采用導彈/機槍來進行打擊;通過分析目標對我作戰行動妨礙程度和對我的打擊強度,判斷我對目標打擊的迫切性;通過分析我打擊目標的收益、打擊目標的成功概率、可能造成的附帶損傷或次生災害等,確定打擊目標的效費比。
自學習系統對外輸出威脅判斷模型、火力選擇模型和毀傷評估模型,這三個模型形成了基礎的輔助決策依據,經過無線傳輸模型傳遞到操控終端給人工決策提供必要參考。遠端的操作員在輔助決策信息的支持下,綜合各種情況,給出最終的人工決策,并把相關的信息傳遞回自學習系統作為反饋;自學習系統會根據這些決策信息對于已有的三個模型進行更新,優化模型參數,逐步提高各個模型精度。
在整體的學習過程中,有兩個閉環系統[9]:一個是智能識別的閉環,這個閉環的任務就是不斷的提升目標識別的準確性為智能輔助決策提供必要的數據支持;另外一個閉環就是決策的閉環,這個閉環的任務是通過不斷的比對自主決策的輸出和人工決策的輸出,通過機器學習手段來不斷學習人的決策過程,不斷提升系統的自主決策能力,從而為人工決策提供有力的幫助。
2.3 關鍵技術
2.3.1目標威脅評估
目標威脅評估是進行火力打擊決策的前提,是智能武器站作戰決策過程中的重要一環。合理的威脅評估模型是求取綜合威脅值的基礎,是提高評估效果的關鍵[10]。
目標對武器站產生威脅大小,主要取決于目標打擊能力和打擊意圖兩個方面。目標打擊能力由目標本身固有火力性能以及某一時刻目標的射擊距離等射擊參數決定。目標打擊意圖指目標實施打擊行動的可能性,根據目標動向進行判斷。選取目標類型、相對距離、相對速度、打擊角度和攻擊狀態五個指標[11],以構建無人戰車戰場目標威脅評估指標體系。
目標的威脅程度主要由以下幾個指標來判斷:目標類型、相對距離、相對速度、打擊角度、攻擊狀態。將攻擊狀態按照威脅程度由高至低依次分為以下3個級別:
1級:目標正射擊;目標已射擊過1發或若干發炮彈,仍然處于繼續射擊狀態。
2級:敵方目標正降低車速轉動炮塔或降低炮身把炮口指向我方坦克;目標已完成對我方和友鄰的射擊動作,正轉移火力準備對我進行打擊。
3級:不在目標的有效射程之內;目標暫時不會射擊。
2.3.2火力打擊決策
在使用分類器得到目標威脅的評估指標后,將根據評估結果和不同作戰場景(如表1所示)選擇不同的武器來進行火力打擊。
作戰場景1:作戰任務為正面突防作戰,攻擊的目標為地面裝甲車輛群,目標分布較為分散,且速度較快。由于白天天氣晴朗,但空氣相對濕度較大,探測器選擇使用電視。經目標威脅判斷后,判定該目標威脅較大,為保護我后方有生力量,充分發揮智能武器站的優勢,采用編隊突防協同作戰,并使用輕量化導彈攻擊目標。
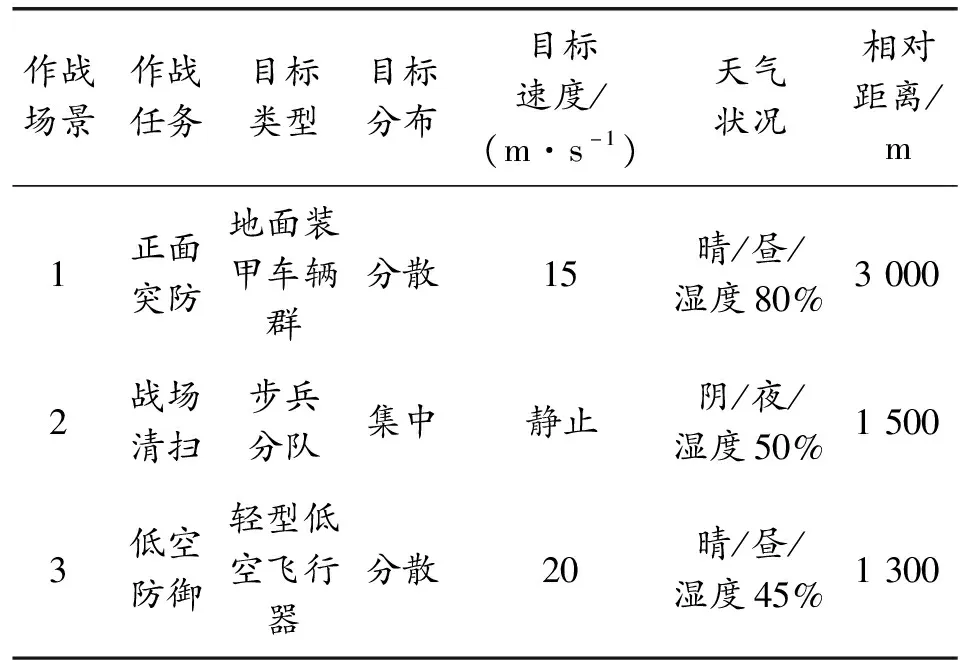
表1 作戰場景
作戰場景2:作戰任務為戰場清掃,攻擊目標為集中分布的步兵分隊。由于是夜間作戰,且空氣相對濕度適中,探測器選擇使用紅外。經目標威脅判斷后,判定該目標威脅等級為,采用單車作戰,直接使用榴彈攻擊目標。
作戰場景3:作戰任務為低空防御,攻擊目標為輕型低空飛行器。由于是白天作戰,天氣狀況良好,且空氣相對濕度適中,探測器選擇紅外或者電視均可。經目標威脅判斷后,判定該目標威脅等級為中級,采用單車作戰,由于目標距離較近,且屬于輕型低空飛行器,使用機槍攻擊目標。
2.3.3目標毀傷評估
1)毀傷評估模塊組成
在基于深度學習的基礎上,嘗試性的構建了評估分級模型,對目標毀傷效果進行了評估。一個完整的基于圖像變化檢測的目標毀傷評估模塊應包括:目標毀傷模型庫、毀傷效果評價體系兩個部分。
① 目標毀傷圖像庫
用于裝甲和空中目標歸類,構建諸如主戰坦克、履帶式裝甲、輪式裝甲、低空飛行器等目標模型,先驗模型的種類和參數要盡可能完善,目標毀傷模型可以通過射擊試驗數據獲得,由于射擊試驗數據樣本量有限,還可以通過模擬仿真生成目標毀傷數據。
② 毀傷效果評價體系
根據目標模型庫中的尺寸參數,分析被打擊目標的結構、標準功能,建立目標多個圖像特征的權值計算方法,確定毀傷等級評定的原則和標準。
2)毀傷評估模塊框架
毀傷評估模塊基于自學習技術,采用卷積神經網絡、稀疏自動編碼、多尺度學習、遷移學習等框架,在小樣本條件下進行多模態打擊區域圖像進行卷積神經網絡訓練研究、多模態毀傷圖像融合研究、多模態毀傷目標分割研究、多模態毀傷目標識別等內容,實現毀傷區域效果評估與檢測。研究內容及框架如圖4所示。
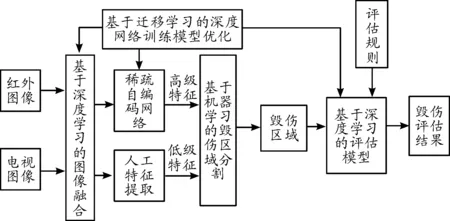
圖4 多模態深度特征學習的毀傷評估
2.3.4自學習技術
在智能輔助決策系統中,最重要的就是自學習系統,這是整個輔助決策系統智能化的核心部分[12]。學習過程可以采用監督學習和自主學習相結合的機器學習手段來完成,整體流程示意圖如圖5所示。
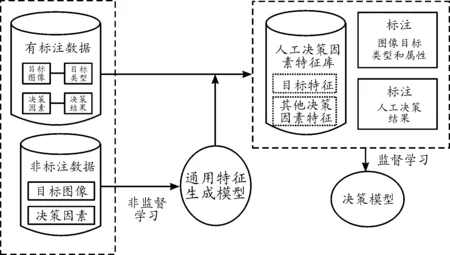
圖5 監督學習和自主學習相結合的機器學習流程圖
對于戰場車輛識別或者人體檢測跟蹤的任務,首先通過操作員的標注可以獲得一批有標識的數據,主要包括對圖片中車輛或者人體的位置、速度、距離、目標大小,以及針對不同戰時情況的人工決策數據。
還有一部分則是未標注數據。這部分是在戰場環境下得到的實時數據,盡管可以不斷的獲取更多的視頻數據,也很難對這些新數據進行全面的標注。在本框架中,所有的數據(標注和非標注)被收集到一起,然后通過非監督學習的方式來學習出通用的低維表達。這種方式在深度學習流行之前就已經被普遍使用,包括主元分析法(PCA)和流行學習(Manifold learning)都被普遍使用,新一代的基于深度學習方法通常使用珀耳茨曼機(Restricted Boltzmann Machine,RBM)等模塊來實現更加有效的數據降維,而且提供的表達和基于深度網絡的監督學習高度兼容。有了這樣的通用表達之后,將標注數據轉換為標注數據特征,在此基礎上,協同這些數據所帶的特征進行最終的任務模型學習(檢測跟蹤等等)。隨著系統學習能力的提升,其學習模型的準確率也會相應提升。
3 智能輔助決策系統的發展方向
盡管武器站智能輔助決策系統的研究已經初步形成基本框架,有了一定的成果。然而,從武器站實際作戰應用來考慮分析,戰場環境實時變化,難以量化的各類因素成為智能決策的最大障礙,武器站智能輔助決策系統未來應該朝著以下方向發展:
1)提高結構化數據處理能力
系統通過觀瞄設備和感知設備獲取了戰場大量的目標和環境信息,生成的結構化數據,必須采用效率更高的智能算法對這些數據進行分析和處理,對真實或虛假、甚至錯誤的信息進行辨別,向自學習系統輸入準確的數據,從而及時、準確、有效地對戰場態勢進行感知。
2)不斷完善輔助決策模型
輔助決策模型包括:威脅判斷、火力選擇和毀傷評估等模型,目前只是對單個模型建立了功能模塊,對單個模塊主要功能和工作流程進行研究,相互之間數據還不能聯調,還需要利用系統軟件工程,將各個模塊的軟件接口進行集成,形成功能齊全的輔助決策模型。
3)增強自學習系統的學習效率
自學習系統現在的學習過程主要采用機器學習手段來完成,將來需要融合深度學習和強化學習技術,實現從傳統的有監督學習和大型標注樣本特征提取向無監督學習和小數據集泛化能力上轉變[13],使自學習系統能夠從輸入的數據中抽取出其中所包含的模式和規則,從而不斷地提高學習效率和智能化能力,逐步實現智能輔助決策的效率和準確性超過人的決策。
4 結論
智能輔助決策系統通過目標威脅評估、火力打擊決策、目標毀傷評估以及自學習技術的運用, 能夠給武器站的操縱者提供全套的輔助決策信息,從而使武器站的作戰效能大幅度提升,智能化水平得到極大的提高,推動武器站向著無人化方向發展,智能輔助決策系統在武器站領域的應用將具有十分重要的研究價值。可是,當前智能輔助決策系統距離武器站實際應用要求還存在較大差距,武器站將在近階段、甚至很長一段時間內處于人工的半自主式控制模式,決策權仍主要掌握在人手中。未來智能輔助決策系統將代替人掌握大部分的決策權,人只是在確保安全的情況下進行干預,武器站的自主化等級將逐步提高。這將是一項艱巨的系統工程,需要通過持之以恒的努力,實現技術上的更大突破。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
