一種傾轉(zhuǎn)四旋翼無(wú)人機(jī)氣動(dòng)特性研究
2020-04-22 08:31:14伍詠成陳自力季近健
兵器裝備工程學(xué)報(bào) 2020年3期
伍詠成,陳自力,季近健
(1.陸軍工程大學(xué)石家莊校區(qū),石家莊 050003;2.中國(guó)人民解放軍66336部隊(duì),河北 保定 074000)
傾轉(zhuǎn)四旋翼無(wú)人機(jī)是把固定翼無(wú)人機(jī)與四旋翼無(wú)人機(jī)的特點(diǎn)結(jié)合起來(lái)的一種新型無(wú)人機(jī)。它既可以像四旋翼無(wú)人機(jī)一樣垂直起降與懸停,也可以像固定翼無(wú)人機(jī)一樣擁有較快的巡航速度以及較長(zhǎng)的航程[1],相對(duì)于傾轉(zhuǎn)雙旋翼無(wú)人機(jī),它具有更強(qiáng)的運(yùn)載能力以及更快的飛行速度。
由于傾轉(zhuǎn)四旋翼無(wú)人機(jī)同時(shí)存在旋翼和機(jī)翼兩種升力裝置,且二者之間存在氣動(dòng)干擾,這使得該種無(wú)人機(jī)的氣動(dòng)特性較為復(fù)雜。當(dāng)前針對(duì)無(wú)人機(jī)的氣動(dòng)特性研究主要有實(shí)驗(yàn)研究和數(shù)值模擬兩大類(lèi)方法。實(shí)驗(yàn)研究多采用風(fēng)洞的方法來(lái)分析氣動(dòng)特性,但這種方法需要建立專(zhuān)門(mén)的實(shí)驗(yàn)室,具有成本高、實(shí)驗(yàn)周期長(zhǎng)的缺點(diǎn),多用于戰(zhàn)斗機(jī)、客機(jī)的設(shè)計(jì)和制造等工業(yè)過(guò)程中。
隨著數(shù)值計(jì)算理論的發(fā)展和計(jì)算機(jī)性能的提升,計(jì)算流體力學(xué)(CFD)方法逐漸成為無(wú)人機(jī)氣動(dòng)特性研究的重要方法[2-4]。CFD方法利用數(shù)值計(jì)算方法的理論,通過(guò)計(jì)算機(jī)計(jì)算,得到流體控制方程的近似解,極大地節(jié)省了實(shí)驗(yàn)成本以及科研工作者的時(shí)間。
目前對(duì)于傾轉(zhuǎn)旋翼機(jī)的氣動(dòng)分析主要以傾轉(zhuǎn)雙旋翼機(jī)為研究對(duì)象進(jìn)行分析[5-7],而對(duì)于傾轉(zhuǎn)四旋翼無(wú)人機(jī)的氣動(dòng)分析研究成果還比較少。本研究以一種X型架構(gòu)的傾轉(zhuǎn)四旋翼無(wú)人機(jī)為研究對(duì)象,用CFD方法進(jìn)行數(shù)值模擬,分析了該種無(wú)人機(jī)的升力特性。針對(duì)垂直模式和過(guò)渡模式兩種飛行模式,分析了旋翼對(duì)機(jī)翼的氣動(dòng)作用影響,為傾轉(zhuǎn)四旋翼無(wú)人機(jī)的設(shè)計(jì)和控制理論研究提供了借鑒和參考。
1 傾轉(zhuǎn)四旋翼無(wú)人機(jī)
本文研究的傾轉(zhuǎn)四旋翼無(wú)人機(jī)采用前翼加后翼的兩副機(jī)翼來(lái)為無(wú)人機(jī)提供氣動(dòng)升力,在機(jī)翼的翼展末端,掛有可以傾轉(zhuǎn)的旋翼短艙。基于以上設(shè)計(jì),利用Solidworks繪制了無(wú)人機(jī)的三維物理模型,如圖1所示。

圖1 傾轉(zhuǎn)四旋翼無(wú)人機(jī)三維模型示意圖
傾轉(zhuǎn)四旋翼無(wú)人機(jī)有3種飛行模式:
1)垂直模式。當(dāng)旋翼短艙傾轉(zhuǎn)角度為0°,與機(jī)翼面垂直時(shí),主要由旋翼拉力為無(wú)人機(jī)提供升力。此模式下的飛行速度較低,升降舵面對(duì)縱向姿態(tài)幾乎無(wú)控制效果。
2)水平模式。當(dāng)旋翼短艙傾轉(zhuǎn)90°,與機(jī)翼面水平時(shí),主要由氣動(dòng)力為無(wú)人機(jī)提供升力,旋翼拉力此時(shí)為無(wú)人機(jī)提供推力,此模式的飛行速度較快,可以實(shí)現(xiàn)高速巡航。
3)過(guò)渡模式。當(dāng)旋翼短艙傾轉(zhuǎn)角度在0°~90°時(shí),無(wú)人機(jī)的升力由旋翼拉力以及氣動(dòng)力共同提供,在由垂直模式過(guò)渡為水平模式的過(guò)程中,無(wú)人機(jī)的飛行速度不斷增大,升降舵面對(duì)縱向姿態(tài)的控制效果逐漸增強(qiáng)。
通過(guò)旋翼短艙傾轉(zhuǎn)不同的角度,可以實(shí)現(xiàn)無(wú)人機(jī)在水平模式、垂直模式與過(guò)渡模式3種飛行模式之間的切換。無(wú)人機(jī)的重心配置在前后兩副機(jī)翼之間,以保持飛行過(guò)程中的力矩穩(wěn)定性。前后機(jī)翼的翼型均取自NACA標(biāo)準(zhǔn)翼型庫(kù)。
2 基于CFD方法的流場(chǎng)求解
2.1 控制方程
流體運(yùn)動(dòng)的基本規(guī)律為物理學(xué)上的三大守恒定律,即質(zhì)量守恒定律、動(dòng)量守恒定律以及能量守恒定律[8]。這三大定律結(jié)合起來(lái),就組成了描述流體運(yùn)動(dòng)特征的基本控制方程,即Navier-Stokes(N-S)方程[9]。
目前研究旋翼的氣動(dòng)特性有很多種方法,比如動(dòng)量源法,滑移網(wǎng)格法以及運(yùn)動(dòng)嵌套網(wǎng)格等方法。其中動(dòng)量源法具有網(wǎng)格生成難度小,網(wǎng)格數(shù)量少,數(shù)值解計(jì)算快的優(yōu)點(diǎn),本研究采用動(dòng)量源法模擬旋翼對(duì)流場(chǎng)的作用。動(dòng)量源法的基本思想是以等效盤(pán)代替旋翼,把螺旋槳對(duì)流場(chǎng)的作用以動(dòng)量源的形式添加到N-S控制方程中。添加了動(dòng)量源項(xiàng)的N-S控制方程如下[10]:

(1)

2.2 網(wǎng)格劃分
CFD方法是基于對(duì)流場(chǎng)進(jìn)行離散化,采用數(shù)值計(jì)算的方法進(jìn)行控制方程的求解。按照一定規(guī)律分布在流場(chǎng)中的離散點(diǎn)的集合就是網(wǎng)格。網(wǎng)格的生成是進(jìn)行CFD計(jì)算的重要步驟也是工作量最大的步驟,生成的網(wǎng)格質(zhì)量決定了數(shù)值計(jì)算的精度以及計(jì)算的效率。
計(jì)算網(wǎng)格主要分為結(jié)構(gòu)性網(wǎng)格、非結(jié)構(gòu)性網(wǎng)格與混合網(wǎng)格3種[11]。隨著非結(jié)構(gòu)網(wǎng)格技術(shù)不斷發(fā)展,其網(wǎng)格質(zhì)量已經(jīng)滿足精確求解的需求。非結(jié)構(gòu)性網(wǎng)格技術(shù)尤其適用于復(fù)雜形狀和多部件裝配體網(wǎng)格的自動(dòng)化生成。本研究采用Fluent Meshing軟件中的Poly算法,生成符合計(jì)算精度要求的多面體非結(jié)構(gòu)網(wǎng)格。在靠近壁面的部分,采用了棱柱邊界層網(wǎng)格,提高數(shù)值計(jì)算精度。由于旋翼短艙的形狀不規(guī)則,并且與機(jī)翼存在縫隙,不易生成高質(zhì)量網(wǎng)格,因此在建模過(guò)程中忽略了旋翼短艙的部分,只保留了旋翼的等效盤(pán)作用面,生成的流場(chǎng)網(wǎng)格如圖2所示,網(wǎng)格數(shù)量為35萬(wàn),網(wǎng)格的最大Skewiness為0.4,可以用于數(shù)值計(jì)算。
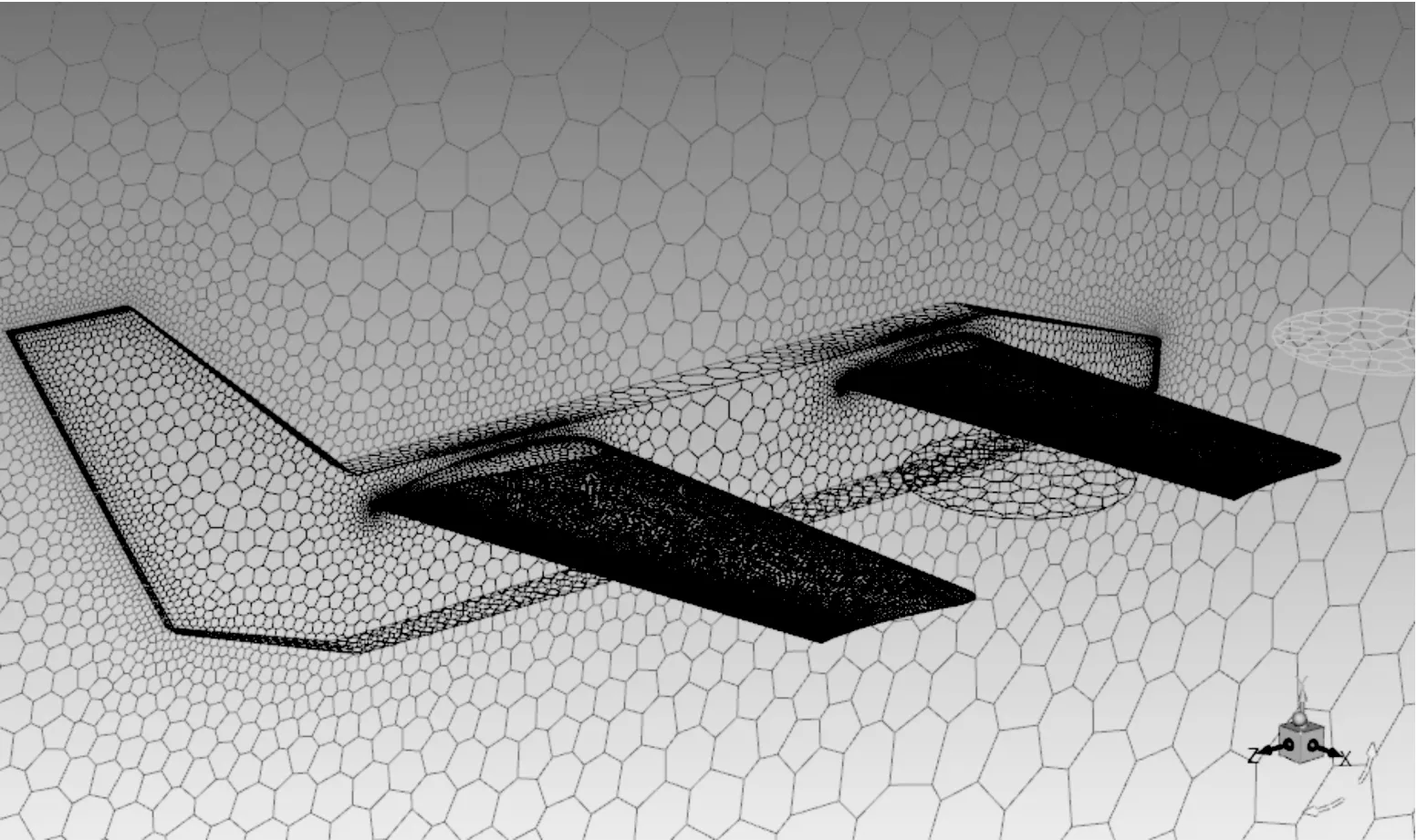
圖2 網(wǎng)格結(jié)構(gòu)示意圖
2.3 計(jì)算方法驗(yàn)證
為了驗(yàn)證動(dòng)量源法模擬旋翼氣動(dòng)結(jié)果的正確性和準(zhǔn)確型,設(shè)計(jì)了旋翼拉力實(shí)驗(yàn)與仿真結(jié)果進(jìn)行對(duì)比。旋翼參數(shù)如表1所示。

表1 旋翼參數(shù)
計(jì)算此旋翼流場(chǎng)所使用的網(wǎng)格如圖3所示:

圖3 計(jì)算旋翼流場(chǎng)網(wǎng)格結(jié)構(gòu)
計(jì)算此旋翼流場(chǎng)所使用的湍流模型為SSTk-ω模型,經(jīng)過(guò)對(duì)比,SSTk-ω模型能夠得到較為準(zhǔn)確的數(shù)值解。
實(shí)驗(yàn)裝置為無(wú)刷電機(jī)拉力轉(zhuǎn)速測(cè)試臺(tái),將電子調(diào)速器和帶有旋翼的無(wú)刷電機(jī)安裝在測(cè)試臺(tái)上,獲得拉力與轉(zhuǎn)速的實(shí)驗(yàn)數(shù)據(jù)。
數(shù)值計(jì)算得到的結(jié)果與實(shí)驗(yàn)結(jié)果如圖4所示。
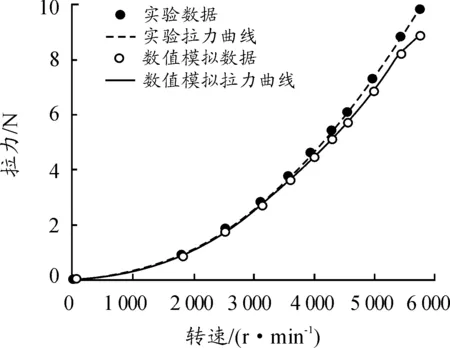
圖4 旋翼拉力計(jì)算值與實(shí)驗(yàn)值
由圖可知,使用動(dòng)量源方法對(duì)旋翼流場(chǎng)進(jìn)行模擬在低速情況下可以獲得與實(shí)驗(yàn)值接近的結(jié)果,滿足數(shù)值模擬的計(jì)算精度要求。
3 氣動(dòng)特性分析
將建立的用于傾轉(zhuǎn)四旋翼無(wú)人機(jī)流場(chǎng)計(jì)算的網(wǎng)格文件導(dǎo)入求解器,設(shè)置相關(guān)參數(shù),壁面的邊界條件,選擇求解方法,即可開(kāi)始迭代計(jì)算流場(chǎng)的數(shù)值解。由于無(wú)人機(jī)為對(duì)稱(chēng)結(jié)構(gòu)且流場(chǎng)分布均勻,為了減少計(jì)算量,只對(duì)無(wú)人機(jī)的半模型進(jìn)行氣動(dòng)分析,同時(shí)將對(duì)稱(chēng)面設(shè)置為symmetry邊界條件。無(wú)人機(jī)垂直模式下的壓力云圖如圖5。

圖5 垂直模式壓力云圖
由壓力云圖可知,旋翼產(chǎn)生的下洗流打在了機(jī)翼的上表面,形成了高壓區(qū),并且氣流會(huì)沿著翼展方向擴(kuò)散。為了研究旋翼下洗流對(duì)氣動(dòng)特性的影響,繪制出有旋翼和無(wú)旋翼兩種狀態(tài)下的無(wú)人機(jī)升力特性曲線,如圖6。

圖6 兩種狀態(tài)下無(wú)人機(jī)的升力特性曲線
由圖6可知,旋翼產(chǎn)生的下洗流會(huì)對(duì)無(wú)人機(jī)的升力產(chǎn)生負(fù)面影響,應(yīng)盡量減少下洗載荷對(duì)機(jī)翼的影響,可以考慮更改旋翼與機(jī)翼的相對(duì)位置,如布置在機(jī)翼的尾緣。在過(guò)渡模式下,由于旋翼傾轉(zhuǎn)角度的變化,旋翼的下洗流方向也會(huì)發(fā)生較大變化,為了區(qū)分于水平模式和垂直模式,本研究選取了過(guò)渡過(guò)程中最為典型的旋翼傾轉(zhuǎn)角度為45°的情形進(jìn)行了氣動(dòng)分析。在過(guò)渡過(guò)程中,旋翼的拉力方向發(fā)生了變化,旋翼對(duì)無(wú)人機(jī)俯仰力矩的控制作用逐漸減弱,旋翼由一種控制機(jī)構(gòu)逐漸切換為一種動(dòng)力裝置。設(shè)置速度入口的邊界條件為5 m/s,壓力云圖如圖7。
由圖7可知,由于過(guò)渡模式旋翼產(chǎn)生的下洗流方向發(fā)生了變化,旋翼對(duì)機(jī)翼的影響作用有所減少,并且下洗流產(chǎn)生的高壓區(qū)主要在后翼的部分,此狀態(tài)下對(duì)應(yīng)的速度矢量如圖8。

圖7 速度為5 m/s時(shí)過(guò)渡模式壓力云圖

圖8 速度為5 m/s時(shí)過(guò)渡模式速度矢量圖
當(dāng)飛行速度增加到10 m/s時(shí),無(wú)人機(jī)的壓力云圖如圖9。
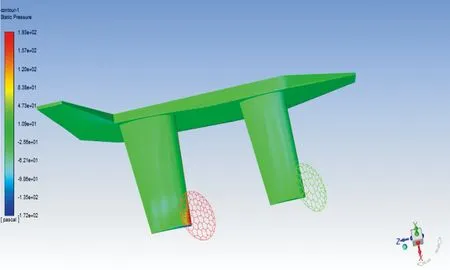
圖9 速度為10 m/s時(shí)過(guò)渡模式壓力云圖
當(dāng)飛行速度繼續(xù)增加到15 m/s時(shí),無(wú)人機(jī)的壓力云圖如圖10。

圖10 速度為15 m/s時(shí)過(guò)渡模式壓力云圖
由壓力云圖可知,隨著飛行速度的增加,旋翼對(duì)機(jī)翼的影響越來(lái)越弱,此時(shí)傾轉(zhuǎn)四旋翼無(wú)人機(jī)與固定翼無(wú)人機(jī)的氣動(dòng)特性相近。因此,在設(shè)計(jì)過(guò)渡模式的操縱策略時(shí),應(yīng)合理的設(shè)計(jì)飛行速度與旋翼短艙傾轉(zhuǎn)角度的配合關(guān)系,以達(dá)到較高的飛行氣動(dòng)效率,提高無(wú)人機(jī)的操縱穩(wěn)定性。
4 結(jié)論
傾轉(zhuǎn)四旋翼無(wú)人機(jī)旋翼和機(jī)翼兩種升力機(jī)構(gòu)存在相互作用。采用動(dòng)量源法對(duì)流場(chǎng)進(jìn)行了數(shù)值仿真計(jì)算。在垂直模式下,旋翼產(chǎn)生的下洗流會(huì)損失無(wú)人機(jī)的升力。設(shè)計(jì)無(wú)人機(jī)時(shí),應(yīng)增大旋翼與機(jī)翼的距離,減小下洗載荷。在過(guò)渡模式下,由于前旋翼的存在,后旋翼對(duì)機(jī)翼的影響更為強(qiáng)烈,隨著飛行速度的增加,旋翼對(duì)機(jī)翼的影響逐漸減小。在設(shè)計(jì)過(guò)渡模式的操縱策略時(shí),可以采用目標(biāo)優(yōu)化等方法,合理設(shè)置飛行速度與短艙傾轉(zhuǎn)角度的配合關(guān)系,以達(dá)到較高的飛行效率及穩(wěn)定性。
