基于AI的電梯轎廂實時定位監(jiān)測系統(tǒng)
2020-03-23 06:01:08賈玉坤沈姝君陳蘇秧周海丹陳進(jìn)熹洪尉尉
科技風(fēng) 2020年7期
賈玉坤 沈姝君 陳蘇秧 周海丹 陳進(jìn)熹 洪尉尉
摘?要:電梯作為高層建筑中常用的交通工具,其安全可靠的運行尤為重要。通過井道內(nèi)部安裝UWB高精度定位基站,轎廂安裝高精度定位標(biāo)簽,對轎廂進(jìn)行實時高精度定位。實時構(gòu)建轎廂全天位置速度圖,采用AI人工智能算法結(jié)合任意位置、不同時刻運行速度,當(dāng)速度發(fā)生大于閾值的跳變即可據(jù)此報警。實驗證明該方法具有較高的問題可識別性。
關(guān)鍵詞:AI;實時定位;監(jiān)測系統(tǒng)
隨著經(jīng)濟(jì)的不斷發(fā)展,城市規(guī)模也在不斷逐漸擴(kuò)大,高層建筑及超高層建筑越來越多,電梯這種高層建筑交通工具必不可少,且越裝越多。近年,電梯大量安裝,很多電梯超負(fù)荷運行且進(jìn)入了問題高發(fā)期,故造成了大量事故及人員的傷亡,電梯安全運行及監(jiān)測越來越受人們的關(guān)注[2],[3]。
目前在運行的幾乎所有的電梯由專業(yè)的電梯維保人員進(jìn)行上門定期檢修,維護(hù)和故障處理。由于電梯分布極其分散且分布區(qū)域廣泛,電梯穩(wěn)定運行關(guān)乎人的生命安全,維保人員需求量巨大,仍以傳統(tǒng)的人工處理、故障處理的做法將無法得到滿足,且有些維保、故障處理亦沒有詳實的參數(shù)記錄,從而要求電梯維保人員每次維保及故障排除都需要對電梯進(jìn)行全方位的檢查才能清除問題,致使電梯維保人員其工作效率不高。
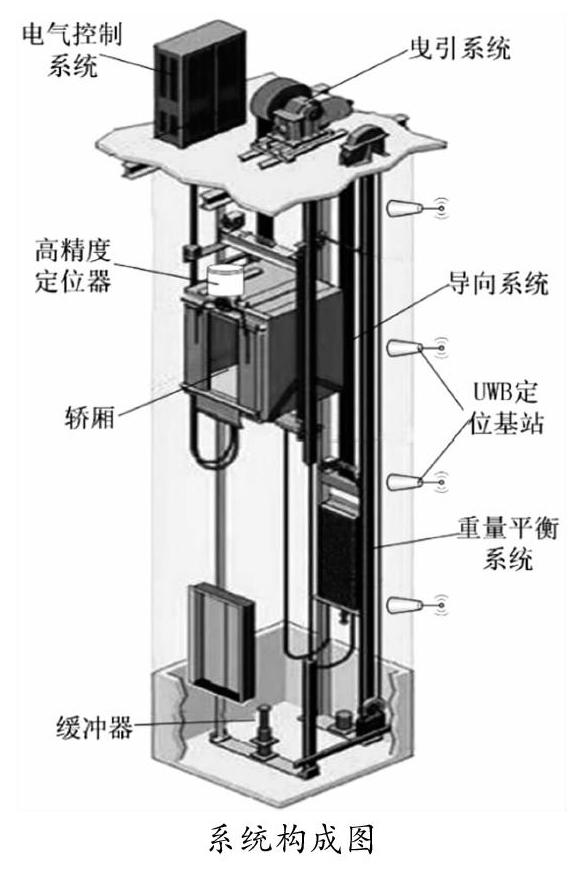
1 系統(tǒng)構(gòu)成
人工智能(Artificial Intelligence),英文縮寫為AI。它是研究、開發(fā)用于模擬、延伸和擴(kuò)展人的智能的理論、方法、技術(shù)及應(yīng)用系統(tǒng)的一門新的技術(shù)科學(xué)。隨著計算機技術(shù)、電子技術(shù)及機械控制技術(shù)的跨越式飛越,AI人工智能的研究領(lǐng)域也變得越來越廣泛,逐步從實驗室走向人們?nèi)粘I畹姆椒矫婷妗H斯ぶ悄苁且婚T極富挑戰(zhàn)性的科學(xué),其研究領(lǐng)域主要包括以下幾個方面:認(rèn)知系統(tǒng)架構(gòu),學(xué)習(xí)與推理,機器學(xué)習(xí),運動控制,機器視覺等。[1]
本系統(tǒng)實現(xiàn)了一種基于AI的電梯轎廂實時定位監(jiān)測,該系統(tǒng)是電梯井道全域掃描安全監(jiān)測系統(tǒng)的一個子系統(tǒng),通過井道內(nèi)部安裝密集的UWB高精度定位基站,轎廂頂部及底部安裝高精度定位標(biāo)簽,依據(jù)頂部及底部高精度定位標(biāo)簽差分信號對轎廂進(jìn)行高精度定位。以10ms為單位將定位大數(shù)據(jù)實時上傳至遠(yuǎn)程云端服務(wù)器,構(gòu)建轎廂全天、全年乃至多年的位置速度圖。通過大數(shù)據(jù)分析輔以AI人工智能算法繪制全天“位置速度畫像”;任意位置的全天不同時刻的運行速度與“位置速度畫像”有巨大跳變,且其跳變超過設(shè)定閾值即可據(jù)此報警。跳變閾值可根據(jù)時刻設(shè)定,時刻精度為100ms。其系統(tǒng)構(gòu)成圖如下圖所示。
2 硬件設(shè)計
2.1 高精度定位器
高精度定位器安裝在轎廂底部及轎廂底部,采用定位標(biāo)簽差分信號,提高定位精度。定位芯片采用高精度UWB芯片,對轎廂所處位置進(jìn)行高精度差分信號定位,并將定位數(shù)據(jù)通過定位基站實時傳送給遠(yuǎn)程云端服務(wù)器。DWM1000基于DecaWave公司開發(fā)的DW1000芯片,兼容IEEE802.15.4-2011協(xié)議的超寬帶無線收發(fā)芯片;在實時定位系統(tǒng)中用于物體的定位,精度高達(dá)厘米級別;數(shù)據(jù)傳輸速率高達(dá)6.8Mb/s;通信距離在300米;使用短包方式通信,標(biāo)簽的密度高達(dá)11000個;對于多路徑衰弱有更強的抗干擾能力,在高衰弱環(huán)境下也可以進(jìn)行可靠的通信;低功耗特色;物理尺寸很小,且其集成天線,簡化用戶產(chǎn)品設(shè)計。
2.2 UWB定位基站
定位基站主控模塊采用時下流行的樹莓派4B,其處理能力強大,內(nèi)部安裝Linux系統(tǒng),板載WiFi及RJ45;定位模塊采用DWM1000。電梯井道內(nèi)部密集安裝UWB定位基站,基站密度決定定位精度。基站獲得高精度定位器位置后通過WiFi、4G/5G、有線網(wǎng)絡(luò)等方式將定位數(shù)據(jù)實時上傳至遠(yuǎn)程云端服務(wù)器。云端服務(wù)器收到定位數(shù)據(jù)通過大數(shù)據(jù)分析輔以AI人工智能算法繪制全天“位置速度畫像”,用以報警分析。
3 軟件設(shè)計
為了提高程序的可測試性,本系統(tǒng)軟件采用模塊化設(shè)計編程思想,定位基站控制程序采用Python語言實現(xiàn)。高精度定位器及UWB定位基站程序均包括:硬件初始化、系統(tǒng)互聯(lián)、數(shù)據(jù)處理、AI人工智能算法等程序模塊、系統(tǒng)軟硬件自診斷模塊。電梯轎廂實時定位監(jiān)測系統(tǒng)是一個對時間變化性要求很高的系統(tǒng),本系統(tǒng)具有很強的實時性,每10ms產(chǎn)生一次高精度定位數(shù)據(jù)對電梯的定位進(jìn)行實時監(jiān)測,完成數(shù)據(jù)的處理并進(jìn)行AI人工智能算法數(shù)據(jù)整合后將數(shù)據(jù)發(fā)送到服務(wù)器。同時系統(tǒng)具有較強的靈活性和可靠性,而且具良好的自診斷功能。
4 結(jié)語
基于AI的電梯轎廂實時定位監(jiān)測系統(tǒng)實時監(jiān)測轎廂定位數(shù)據(jù),通過大數(shù)據(jù)分析輔以AI人工智能算法繪制轎廂全天“位置速度畫像”;監(jiān)測任意位置的全天不同時刻的運行速度與“位置速度畫像”有巨大跳變,以此報警,并將報警數(shù)據(jù)實時發(fā)送到維保人員的手機上。實驗證明該系統(tǒng)具有較高的可識別性、且無需人工干預(yù),具有廣闊的市場前景,也能夠?qū)﹄娞荻〞r準(zhǔn)確維保提供技術(shù)支持。
參考文獻(xiàn):
[1]鄒蕾,張先鋒.人工智能及其發(fā)展應(yīng)用[J].信息網(wǎng)絡(luò)安全,2012(2):11-13.
[2]程峰.電梯遠(yuǎn)程監(jiān)控技術(shù)及其發(fā)展[J].濟(jì)南:科技信息,2012.2.
[3]李中興,林創(chuàng)魯,邱東勇,等.基于STM32的電梯實時監(jiān)測系統(tǒng)[J].自動化與信息工程,2012,33(01):43-45.
基金項目:杭州職業(yè)技術(shù)學(xué)院校級科研課題“基于AI的電梯井道全域掃描安全監(jiān)測系統(tǒng)研制”(ky202025)
