航空無刷直流電動機四象限PWM 驅動PI控制方法研究
2020-03-06 13:41:30姚葉明徐禮林
微特電機 2020年2期
關鍵詞:重置
姚葉明,徐禮林
(航空工業金城南京機電液壓工程研究中心,南京211106)
0 引 言
無刷直流電動機(以下簡稱BLDCM)使用電子器件實現換相工作,避免了有刷電機中電刷與換向器的接觸磨損,提高了電機的可靠性與壽命,因此在航空領域得到了廣泛的應用[1]。同時,隨著功率電傳技術的發展,飛控作動正逐漸由液壓伺服向電氣伺服轉變[2],這對航空BLDCM 四象限下的控制特性提出了更高的要求。驅動電路的PWM 開關控制方式以及續流回路的單向導通特性,使得BLDCM在不同象限運行時表現出不一樣的控制特性,電機的驅動控制算法對其動態性能起到決定性的影響。現有文獻中雖然提出了BLDCM 的多種PWM 驅動控制方法[3-5],但是大多未對電機制動工況進行討論[6-7],硬件結構與控制算法比較復雜[8-10],難以在工程實際中運用。
無論對電機進行位置控制還是速度控制,最終都可以轉化為對電機電流的控制。通過改進PWM驅動方法,使得電機在四象限運行時繞組電流都能夠快速、穩定地跟隨電流指令,從而提高電機在四象限工作下的動態性能。對于BLDCM,傳統的PID控制方法已經能夠使其在Ⅰ,Ⅲ象限(驅動模式)下有較好的控制性能,但是在Ⅱ,Ⅳ象限(制動模式)工作時,電機電流控制效果較差。為了解決上述問題,本文提出了變參數可重置的PI控制方法,通過重置PI控制器積分項來解決電機在驅動與制動模式間的轉換過渡,通過變PI參數提高制動模式下電流控制的穩定性。實驗數據表明,使用該方法能夠提高制動工況下電機電流的控制精度,提高電機動態性能。
1 BLDCM 的PWM 驅動方法及回路分析
BLDCM 一般使用三相橋式驅動電路進行驅動。當電機運行在Ⅰ,Ⅲ象限時,使用單管調制的方法對驅動橋路進行控制,以提高電機的有效轉矩[11];當電機運行在Ⅱ,Ⅳ象限時,使用雙管調制的方法對驅動橋路進行控制,以避免電機相電流在反電動勢作用下出現不可控的現象[12]。本文將分別對電機在Ⅰ,Ⅲ象限以及Ⅱ,Ⅳ象限運行時的驅動橋路進行分析,以得到PWM 占空比與電機相電流之間的關系。為了便于分析,進行如下假設:電機相電流變化速率遠小于PWM 開關頻率,即單個PWM周期始末相電流近似相等;單個PWM 周期中電機相電阻上的壓降不變,即忽略PWM 調制過程中電流波動對相電阻上壓降的影響;單個PWM 周期中電機繞組反電動勢不變,即忽略PWM 調制過程中電機轉速的波動。
1.1 Ⅰ,Ⅲ象限驅動橋路分析
電機在Ⅰ,Ⅲ象限工作時電機繞組的導通及續流回路如圖1所示,圖1(a)為導通回路,圖1(b)為續流回路。為不失一般性,本文設定PWM 調制過程中驅動橋路下管常閉,上管進行斬波控制;電機驅動電流從B相流入,A相流出,此時繞組上反電動勢的方向與電流方向相反,即由A相指向B相。當電機繞組處于導通狀態時,T3 管與T2 管導通,電流從電源通過T3管流入B相繞組,從A相繞組流出后經過T2管流回電源。當電機繞組處于續流狀態時,T3管關閉,T2管導通,繞組電流在其電感作用下保持流通方向不變,從A相繞組流出的電流經過T2管以及續流二極管D4后流進B相繞組形成回路。

圖1 電機繞組導通及續流回路(Ⅰ,Ⅲ象限)
根據以上分析,可以寫出導通和續流狀態下的繞組回路電壓方程:

式中:L,R分別為電機繞組相電感與相電阻;i為繞組電流;uBEF為單相繞組反電動勢;u為施加在繞組上的外電壓,繞組導通時,u=us/2,us為電源電壓;繞組續流時,u=0。
在一個PWM 周期內對式(1)進行積分并結合本文的三點假設,可以得到如下方程:

式中:D,T分別為PWM 指令的占空比與周期。式(2)左側與右側分別代表每個PWM 周期中繞組電流在導通與續流過程中的變化量。根據式(2)可以得到電機工作在Ⅰ,Ⅲ象限時占空比與相電流的關系:

1.2 Ⅱ,Ⅳ象限驅動橋路分析
為了方便說明,本文仍以電機A,B繞組通流為例分析電機在Ⅱ,Ⅳ象限工作時的導通及續流通路,并假設此時電機轉速方向與前面一致,轉矩方向與前面相反。電機轉速方向不變說明每一相反電動勢的方向不變,電機轉矩方向相反說明通過繞組的電流方向相反,此時電機的導通及續流通路如圖2所示。

圖2 電機繞組導通及續流回路(Ⅱ,Ⅳ象限)
當電機繞組處于導通狀態時,T1管與T4管導通,電流從電源通過T1管流入A相繞組,從B相繞組流出后經過T4管流回電源。當電機繞組處于續流狀態時,若仍進行單管調制,即只對T1管進行PWM 調制而T4管常通,電流則會在反電動勢的作用下形成從續流二極管D2依次經過A相、B相至T4管的環路,而不受T1管PWM 信號的控制。為了克服上述缺點,當電機運行在Ⅱ,Ⅳ象限時需要進行雙管PWM 調制。雙管PWM 調制中電機繞組進行續流時,電流從電源負極經過續流二極管D2流入A相,從B相流出后經過續流二極管D3流回電源正極。
根據以上分析,可以寫出Ⅱ,Ⅳ象限工作時繞組導通和續流狀態下的回路電壓方程:

在繞組導通過程中,施加在繞組上的外電壓u=us/2,繞組續流過程中,u=-us/2。根據式(4)可以得到電機在Ⅱ,Ⅳ象限運行時電流與占空比的關系:

2 變參數可重置PI控制方法
通過上述的分析可知,PWM 調制方法有差別,當電機運行在Ⅰ,Ⅲ象限和Ⅱ,Ⅳ象限時,同樣的占空比對應的電流值并不相等,而現有PWM 驅動控制中普遍使用的PI控制器由于積分環節的作用而存在一定的慣性,當電機運行象限發生變化時,控制器的輸出不能立刻變化,因此在電機運行象限變化時會出現比較大的控制偏差,此時電流控制精度差,電機轉矩波動大。
同時,對式(3)、式(5)進行求導,可以得到電機運行在Ⅰ,Ⅲ象限和Ⅱ,Ⅳ象限下占空比與電機電流的增益系數K13,K24:

從式(6)中可以看出,K24=2K13,即Ⅱ,Ⅳ象限的占空比-電流增益是Ⅰ,Ⅲ象限的兩倍,若使用基于Ⅰ,Ⅲ象限設計的PI參數對電機在Ⅱ,Ⅳ象限運行進行控制時,則有可能出現不穩定的現象。
為了克服上述缺點,本文設計了變參數可重置的PI控制器用于電機PWM 驅動控制。變參數可重置PI控制器包含兩部分:驅動模式控制器和PI控制器。驅動模式控制器根據電機反饋的轉速信號以及電流指令信號判斷電機運行的象限,其判斷邏輯可以使用如下偽代碼表示:
If(轉速信號*電流指令>=0)
電機驅動模式=Ⅰ,Ⅲ象限
Else
電機驅動模式=Ⅱ,Ⅳ象限
End
根據判斷出的電機驅動模式,驅動模式控制器向PI控制器傳遞對應的比例積分系數以及積分器的重置信號與初始值。由于電機Ⅱ,Ⅳ象限運行時的占空比-電流增益是Ⅰ,Ⅲ象限的兩倍,因此只需將電機Ⅱ,Ⅳ象限運行時的比例、積分系數Kp24、Ki24選為Ⅰ,Ⅲ象限運行時系數Kp13、Ki13值的一半,可保證電機在四象限運行時具有近似的控制特性,即:

此外,當驅動模式控制器計算出的電機驅動模式與上一控制周期不一致時,還需對PI控制器進行重置,重置的占空比指令初始值可根據電流指令使用式(3)、式(5)反推得到,式中每項反電動勢可近似表示為電機轉速的線性函數。因此,電機驅動模式轉換時控制器重置的初始值可寫為:
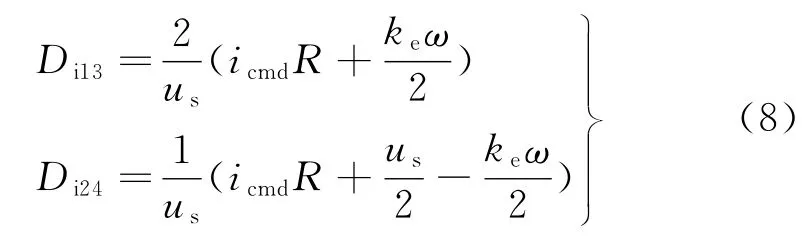
式中:Di13,Di24分別為電機轉換至Ⅰ,Ⅲ象限和Ⅱ,Ⅳ象限運行時占空比指令的初始化值;icmd為電流指令;ke為電機反電動勢系數;ω為電機轉速。
變參數可重置PI控制器的架構如圖3所示。

圖3 變參數可重置PI控制器框圖
3 實驗結果與分析
本文基于英飛凌6ED100HP1-FA 驅動模塊以及恒潤4025FPGA 板卡,對所設計的控制器進行了實驗驗證。實驗中電流使用萊姆LA55-P SP50電流傳感器采集,電流采樣頻率10kHz,實驗所使用的電機主要參數如表1所示。
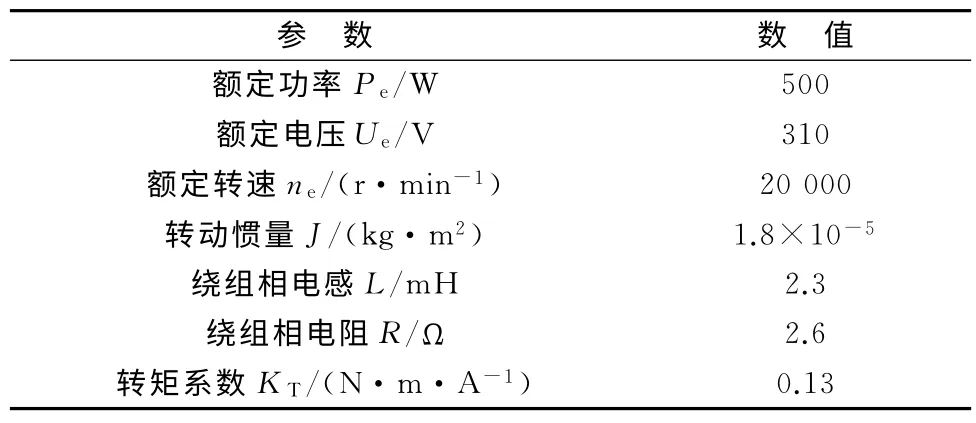
表1 實驗電機主要參數
實驗中,給電機施加正弦轉速指令信號,信號的幅值和頻率分別為12 000r/min和7 Hz。圖4為普通PI控制器實驗結果,圖5為本文變參數可重置PI控制器實驗結果。實驗結果中為了便于觀察,電流指令與電流采樣值經過了截止頻率500 Hz的低通濾波器濾波處理;PWM 占空比信號以及PWM單管/雙管調制模式信號中,0 代表單管調制模式,對應電機工作在Ⅰ,Ⅲ象限時的情況,1代表雙管調制模式,對應電機工作在Ⅱ,Ⅳ象限時的情況。
從圖4可以看出,普通PI控制器不能根據電機運行象限的變化自動重置積分器輸出,所以當電機運行象限發生變化時電機電流的控制偏差明顯增大,最大偏差達到電流幅值的50%以上。電機電流的控制偏差進一步導致電機轉速產生控制偏差,此時轉速控制偏差最大為612r/min。當使用本文提出的變參數可重置PI控制器后(圖5),即使電機運行象限發生變化,電機電流也能較好地跟隨指令信號,電機轉速的控制偏差小于221r/min,僅為普通PI控制器轉速控制偏差的36%。此外,從圖4(c)中還可以看出,當電機運行在Ⅱ,Ⅳ象限時(M=1),PWM 占空比輸出有發散的趨勢,這主要由于電機Ⅱ,Ⅳ象限運行時占空比-電流增益是Ⅰ,Ⅲ象限的兩倍,導致系統在Ⅱ,Ⅳ象限運行時穩定性有所降低。

4 結 語
本文對航空BLDCM 在PWM 驅動下四象限運行時繞組的導通和續流過程進行了分析,并根據電機繞組的導通和續流特性設計了變參數可重置的PI控制器。通過判斷電機運行象限,對PI控制器積分項進行重置與初值設定,能夠有效抑制電機運行象限切換時的電流波動;同時根據電機不同象限運行時PWM 占空比-電流增益的比例,對應修改PI控制器比例與積分系數,提高了系統的穩定性。實驗結果表明,使用本文提出的控制方法,可減小電機轉速跟隨誤差64%。
猜你喜歡
意林(2024年6期)2024-05-11 05:07:39
電腦愛好者(2022年16期)2022-05-30 10:48:04
電腦愛好者(2020年11期)2020-07-29 08:59:26
電腦愛好者(2019年13期)2019-10-30 03:36:29
電腦愛好者(2019年17期)2019-10-30 03:34:48
快樂作文(5.6年級)(2019年5期)2019-09-10 05:59:05
汽車維修與保養(2019年5期)2019-08-21 02:13:24
山西教育·招考(2018年4期)2018-05-30 10:48:04
渭南師范學院學報(2014年3期)2014-05-17 03:22:12
電腦迷(2012年19期)2012-04-29 05:34:36
