反艦導(dǎo)彈擺式機(jī)動(dòng)對(duì)艦空導(dǎo)彈的突防有效性分析
2020-03-05 02:34:24張林,馬良
兵器裝備工程學(xué)報(bào) 2020年1期
張 林,馬 良
(海軍大連艦艇學(xué)院 a.導(dǎo)彈與艦炮系; b.艦船指揮系, 遼寧 大連 116018)
反艦導(dǎo)彈在水面艦艇發(fā)射艦空導(dǎo)彈攔截攻擊情況下一般無(wú)法有效地?cái)[脫艦載雷達(dá)的精確跟蹤。相關(guān)研究發(fā)現(xiàn)[1-6],制導(dǎo)階段反艦導(dǎo)彈可在一定的機(jī)動(dòng)作用下,對(duì)艦空導(dǎo)彈武器末制導(dǎo)系統(tǒng)進(jìn)行干擾,從而有效地?cái)[脫跟蹤和鎖定效果,降低其攔截效能。反艦導(dǎo)彈在飛行過(guò)程中,在自導(dǎo)段可采取不同的機(jī)動(dòng)方式,如“蛇行機(jī)動(dòng)[7]”、“躍升-俯沖機(jī)動(dòng)[8]”等。這些機(jī)動(dòng)方式對(duì)提高反艦導(dǎo)彈的機(jī)動(dòng)性有一定的促進(jìn)作用,不過(guò)這些機(jī)動(dòng)方案單純的考慮了二維平面內(nèi)縱向機(jī)動(dòng)的情況,因而突防效果有限。在實(shí)際作戰(zhàn)過(guò)程中,反艦導(dǎo)彈與艦空導(dǎo)彈在三維空間進(jìn)行攻防對(duì)抗,這會(huì)明顯地影響到反艦導(dǎo)彈的突防概率[9]。為了有效地提高反艦導(dǎo)彈機(jī)動(dòng)突防效能,很有必要研究開(kāi)發(fā)出反艦導(dǎo)彈擺式機(jī)動(dòng)方式,并在此基礎(chǔ)上優(yōu)化末段機(jī)動(dòng)彈道方案。
1 擺式機(jī)動(dòng)對(duì)艦空導(dǎo)彈的突防
反艦導(dǎo)彈末端機(jī)動(dòng)方案中,常見(jiàn)的一種就是反艦導(dǎo)彈擺式機(jī)動(dòng),在這種機(jī)動(dòng)模式下,它要求導(dǎo)彈在三維空間內(nèi)不僅要左右來(lái)回?cái)[動(dòng),而且還要向前運(yùn)動(dòng)。
1.1 反艦導(dǎo)彈擺式機(jī)動(dòng)彈道模型
導(dǎo)彈作擺式機(jī)動(dòng)情況下對(duì)應(yīng)的運(yùn)動(dòng)曲線可看作為螺旋線組合,圖1顯示了空間立體的擺式機(jī)動(dòng)幾何關(guān)系。
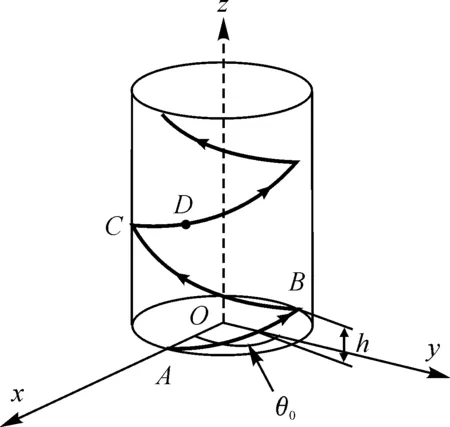
圖1 擺式機(jī)動(dòng)幾何關(guān)系
導(dǎo)彈作擺式機(jī)動(dòng)的運(yùn)動(dòng)周期對(duì)應(yīng)于上圖的折線段ABCD,其中包含了四段折線,在此區(qū)間內(nèi),對(duì)應(yīng)的角速度方向變化兩次,在此基礎(chǔ)上來(lái)回?cái)[式機(jī)動(dòng)。
可通過(guò)如下方程描述AB段擺線:
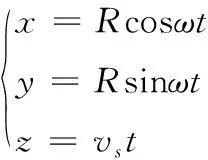
(1)
式中:R為擺動(dòng)半徑;ω為機(jī)動(dòng)角速度;vs為沿?cái)[動(dòng)圓柱軸心線速度;t為機(jī)動(dòng)時(shí)間。或令θ=ωt,參數(shù)方程變換為:
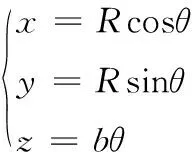
(2)
其中:
(3)
h=θ0b(h為擺距)
(4)
θ0為擺動(dòng)最大角。通常在0~π之間。
展開(kāi)處理其中AB段所圍成的柱面,這樣就可以獲得對(duì)應(yīng)的擺動(dòng)曲線展開(kāi)圖,具體如圖2所示,可確定出以下幾何關(guān)系:
(5)
vs=vsinδ
(6)
反艦導(dǎo)彈為了滿足對(duì)應(yīng)的擺式機(jī)動(dòng)彈道規(guī)劃路徑要求,需要控制其法向加速度。根據(jù)式(4)~式(6)及和對(duì)應(yīng)的法向加速度的計(jì)算公式可確定出其擺式機(jī)動(dòng)運(yùn)動(dòng)模式對(duì)應(yīng)的法向加速度aMN:
aMN={vm·cos[arctan(h/θ0R)]}2/R
(7)
根據(jù)以上關(guān)系可知,在設(shè)計(jì)反艦導(dǎo)彈擺式機(jī)動(dòng)彈道方案過(guò)程中,考慮到相關(guān)法向過(guò)載的限制,應(yīng)該滿足如下要求:
aMN≤aMN max
(8)
其中:aMN max為反艦導(dǎo)彈最大可用法向加速度。

圖2 擺動(dòng)曲線展開(kāi)示意圖
反艦導(dǎo)彈實(shí)施擺式機(jī)動(dòng)攻擊流程為:
1) 準(zhǔn)備攻擊段:在此階段末制導(dǎo)雷獲取目標(biāo)后,開(kāi)始直接導(dǎo)引控制,并據(jù)此進(jìn)行穩(wěn)定跟蹤。
2) 機(jī)動(dòng)段:在滿足時(shí)域和空域條件基礎(chǔ)上,開(kāi)始進(jìn)行機(jī)動(dòng)跟蹤,從而有效地?cái)_動(dòng)敵艦空導(dǎo)彈末制導(dǎo)雷達(dá)。基于設(shè)計(jì)方案中的擺動(dòng)半徑、擺距相關(guān)參數(shù)持續(xù)飛行。
3) 攻擊段:在此階段反艦導(dǎo)彈如果符合機(jī)動(dòng)結(jié)束條件,開(kāi)始進(jìn)行導(dǎo)引控制,直到擊中目標(biāo)。
1.2 艦空導(dǎo)彈反導(dǎo)攔截模型
在此過(guò)程中艦空導(dǎo)彈同時(shí)也攔截反艦導(dǎo)彈,具體如圖3所示,為簡(jiǎn)化分析而將反艦導(dǎo)彈和艦空導(dǎo)彈看作為質(zhì)點(diǎn);其中νi、νm為常量。在此運(yùn)動(dòng)過(guò)程中,任意時(shí)刻,過(guò)兩彈質(zhì)點(diǎn)的連線,確定出對(duì)應(yīng)的水平面的垂直面Q,將此面看作為視線鉛垂平面。在此平面內(nèi)建立對(duì)應(yīng)的對(duì)抗模型。在模型中將νm、νi分別視為1、2、3三個(gè)分量的合成。在此圖中,其中1分量沿兩彈質(zhì)點(diǎn)連線,2分量和前一個(gè)分量保持垂直,而其中3分量和Q平面垂直。

圖3 反艦導(dǎo)彈與艦空導(dǎo)彈相對(duì)運(yùn)動(dòng)關(guān)系
根據(jù)擺式機(jī)動(dòng)的仿真要求,這兩種類型的導(dǎo)彈在對(duì)抗過(guò)程中,依據(jù)相應(yīng)彈體之間的實(shí)時(shí)位置對(duì)其后仿真時(shí)刻的水平方位角pi和垂直俯仰角zi進(jìn)行確定。圖3顯示了二者的運(yùn)動(dòng)關(guān)系,具體分析可知,νm為反艦導(dǎo)彈速度向量;νi為艦空導(dǎo)彈速度向量;pm為反艦導(dǎo)彈水平方位角;pi為艦空導(dǎo)彈水平方位角;zm表示前者的垂直俯仰角;zi表示后者的垂直俯仰角;Rmi為兩彈相對(duì)距離;q1為Q內(nèi)的兩彈視線角;Hm為具體表示對(duì)應(yīng)反艦導(dǎo)彈飛行高度;q2為兩彈視線角;pmi為則表示相應(yīng)兩彈水平方位角;zmi含義為兩彈垂直俯仰角。
具體分析圖3中,二者的相對(duì)運(yùn)動(dòng)關(guān)系,在此基礎(chǔ)上可建立起兩彈相對(duì)運(yùn)動(dòng)方程,具體如下:
(9)
(10)
(11)
其中:
νm在兩彈連線上的分量νm1為:

νi在兩彈連線上的分量νi1為:
vm在垂直兩彈連線上的分量vm2,vm3為:
vm3=vm·cos(zm)·sin(pm-pmi)
νi在垂直兩彈連線上的分量νi2,νi3為:
vi3=vm·cos(zi)·sin(pmi-π-pi)
根據(jù)艦空導(dǎo)彈運(yùn)動(dòng)學(xué)方程:

(12)
(13)
(14)

(15)
(16)
(17)
其中,ai1,ai2為艦空導(dǎo)彈飛行在兩個(gè)平面內(nèi)的法向加速度,此參數(shù)和制導(dǎo)系統(tǒng)動(dòng)態(tài)特性密切相關(guān),且和對(duì)應(yīng)的法向過(guò)載存在一定的相關(guān)性。具體分析其制導(dǎo)系統(tǒng)動(dòng)態(tài)特性,確定出通過(guò)如下方法求解ai1,ai2,法向加速度ai1x,ai2x為:

(18)

(19)
受到法向過(guò)載限制ai1max,ai2max,則法向加速度指令可描述如下:

(20)
具體分析相應(yīng)制導(dǎo)系統(tǒng)的動(dòng)態(tài)特性,可確定出導(dǎo)彈實(shí)際法向加速度ai1為:ai1=G(s)·ai1c。通過(guò)的確定出ai2。
2 仿真及結(jié)果分析
2.1 初始參數(shù)設(shè)置
基于模型和相關(guān)仿真要求,確定出二者的戰(zhàn)技性能參數(shù),如表1所示。
表1 艦空導(dǎo)彈武器系統(tǒng)戰(zhàn)技性能參數(shù)
1) 艦空導(dǎo)彈的性能指標(biāo)
根據(jù)當(dāng)前艦空導(dǎo)彈發(fā)展的實(shí)際情況,確定出制導(dǎo)系統(tǒng)動(dòng)態(tài)特性具體表示為G(s)=(0.2·Ti·s+1)-1,其中,Ti為動(dòng)態(tài)特性參數(shù)。Ti越小則可判斷出其響應(yīng)越快,這種情況下可更好地響應(yīng)反艦導(dǎo)彈的機(jī)動(dòng),對(duì)應(yīng)的脫靶量降低。相反情況下則脫靶量就越大,這里取Ti=0.5 s。
2) 設(shè)置反艦導(dǎo)彈機(jī)動(dòng)彈道參數(shù)
依據(jù)目前先進(jìn)的反艦導(dǎo)彈關(guān)參數(shù)要求確定出反艦導(dǎo)彈的基本參數(shù),據(jù)此確定出指標(biāo)參數(shù)如下[10]:
反艦導(dǎo)彈性能參數(shù)為:飛行速度Ma=0.8;末制導(dǎo)距離LD=25 km;平飛高度H=15 m;
反艦導(dǎo)彈攻擊末段的距離范圍主要和如下因素有關(guān):水面艦艇艦載雷達(dá)視距,目前相控陣?yán)走_(dá)和相關(guān)的跟蹤雷達(dá),對(duì)應(yīng)的搜索最大作用距離為30多km[11]。據(jù)此可知反艦導(dǎo)彈的末段范圍也在此區(qū)間內(nèi)。
在設(shè)置末段機(jī)動(dòng)彈道參數(shù)過(guò)程中,需要考慮到的因素為機(jī)動(dòng)段長(zhǎng)度、擺距、擺動(dòng)半徑等[12]。進(jìn)一步分析可知,受到最大機(jī)動(dòng)過(guò)載限制,因而在此設(shè)計(jì)過(guò)程中應(yīng)該選擇合適的機(jī)動(dòng)參數(shù)才可以滿足此方面要求[13]。根據(jù)資料可知反艦導(dǎo)彈的機(jī)動(dòng)段為(3,17.8)km,在一定推導(dǎo)基礎(chǔ)上確定出以下幾組彈道方案數(shù)據(jù)滿足式(3)、式(4),具體如表2。為方便分析,這種情況下擺動(dòng)最大角設(shè)定為常值,即θ0=0.5 π。
2.2 仿真實(shí)驗(yàn)
在此仿真分析中,對(duì)仿真實(shí)驗(yàn)的反艦導(dǎo)彈與標(biāo)準(zhǔn)Ⅱ與海麻雀艦空導(dǎo)彈運(yùn)用蒙特卡洛法進(jìn)行仿真對(duì)抗,設(shè)置的組合方案如表3所示,基于這些參數(shù)來(lái)仿真分析,在此過(guò)程中選擇出各擺距和擺動(dòng)半徑組合,代入?yún)?shù)來(lái)仿真,所得結(jié)果如圖4所示。反映出擺距h=3.7 km時(shí),在各擺動(dòng)半徑R下的這種導(dǎo)彈的運(yùn)行結(jié)果。

表2 擺式機(jī)動(dòng)彈道方案 (h:擺距(km),R:擺動(dòng)半徑(m))
表3 在不同(h,R)組合下,反艦導(dǎo)彈的突防概率值

圖4 不同擺動(dòng)半徑下的突防概率曲線
擺動(dòng)最大角θ0設(shè)定為固定值情況下的仿真結(jié)果,在分析過(guò)程中為確定出擺動(dòng)最大角θ0對(duì)突防概率的影響,在此進(jìn)行如下仿真,在擺動(dòng)半徑R和角δ一定情況下,確定出各彈道組合的仿真結(jié)果。角δ的選取為表4中h=1.85 km,R=100 m時(shí)的彈道方案,分析式(5)、式(6)可看出,此參數(shù)主要和擺距h與擺動(dòng)最大角存在相關(guān)性。

表4 在不同擺動(dòng)最大角θ0下,反艦導(dǎo)彈的突防概率值
為了對(duì)這種攻防對(duì)抗數(shù)學(xué)模型進(jìn)行驗(yàn)證分析,根據(jù)仿真結(jié)果確定出對(duì)抗過(guò)程中二者的運(yùn)動(dòng)航跡圖。其中圖5、圖6為R=400 m,h=1.23 km,θ0=0.5 π時(shí)一次對(duì)抗效果圖。結(jié)果表明這種模型可對(duì)實(shí)際攻防對(duì)抗過(guò)程進(jìn)行模擬,建立的導(dǎo)彈運(yùn)動(dòng)數(shù)學(xué)模型滿足其性能要求。

圖5 擺式機(jī)動(dòng)對(duì)抗效果(1)

圖6 擺式機(jī)動(dòng)對(duì)抗效果(2)
3 結(jié)論
1) 擺式機(jī)動(dòng)彈道在突防時(shí)是一種有效的機(jī)動(dòng)方式,可提高反艦導(dǎo)彈的攻擊性能,有利于提高突防概率。
2) 擺動(dòng)半徑對(duì)突防概率的影響與擺式機(jī)動(dòng)方式的情況基本一致。分析圖4可發(fā)現(xiàn),突防概率容易受到擺動(dòng)半徑的影響。擺動(dòng)半徑和突防概率存在一定的正相關(guān)關(guān)系。擺動(dòng)半徑大于1 000 m的情況下,對(duì)應(yīng)的突防概率可高于99%,據(jù)此可判斷出擺式機(jī)動(dòng)方式可滿足此方面突防要求,反艦導(dǎo)彈單發(fā)突防概率可達(dá)到很高水平。
3) 擺距不會(huì)明顯影響突防概率,受到最大可用法向加速度的限制,在此參數(shù)選擇過(guò)程中,取擺距為能實(shí)現(xiàn)一個(gè)整周期的機(jī)動(dòng)過(guò)程,就可在擺動(dòng)半徑下取得很高的突防效果。
4) 擺式機(jī)動(dòng)的最大擺動(dòng)角也會(huì)影響到突防概率。具體分析表4可以看出,最大擺動(dòng)角取較小角(如0.125 π)和較大角(π)時(shí),取得了很好的突防較果。而取0.5 π和0.25 π情況下,對(duì)應(yīng)的突防效果明顯變差。據(jù)此可知較大或較小幅度擺式機(jī)動(dòng)可取得最好的效果,這對(duì)選擇最大擺動(dòng)角提供了可靠支持,但最大擺動(dòng)角并不是影響突防概率的首要因素,設(shè)計(jì)機(jī)動(dòng)方案過(guò)程中,應(yīng)考慮到擺距與擺動(dòng)半徑的影響。
5) 最合適擺式機(jī)動(dòng)突防方案為:擺動(dòng)半徑R≥1 000 m,擺距h=3.7 km,最大擺動(dòng)角θ0=0.5 π。這種參數(shù)組合條件下標(biāo)準(zhǔn)導(dǎo)彈和海麻雀導(dǎo)彈的突防概率都能超99%。本文結(jié)果對(duì)提升反艦導(dǎo)彈的突防概率有重要意義,建立的這種機(jī)動(dòng)突防模型可供導(dǎo)彈設(shè)計(jì)參考,也為理論研究提供借鑒。