基于面陣分時分視場成像的在軌相對輻射定標方法
2020-02-27 12:59:28趙竹新王偉東王旭康
無線電工程 2020年3期
關鍵詞:區域
趙竹新,王偉東,王旭康
(1.北京市遙感信息研究所,北京100086;2.中國電子科技集團公司第五十三研究所,天津 300000)
0 引言
輻射定標是光學遙感數據定量化應用的前提[1-3],是衛星圖像預處理以及圖像解譯工作開展的基礎條件[4-6]。相對輻射定標對遙感數據的處理、信息提取和應用具有重要影響[7-9]。隨著地球靜止軌道觀測手段的發展和應用,國內外不斷有地球靜止衛星投入運行,特別是2015年12月高分四號衛星的在軌運行,開創了大面陣光學載荷在靜止軌道對地觀測領域應用的先河。該衛星采用大面陣傳感器,采用凝視成像方式,單景視場可達400 km×400 km。對于此類大面陣光學載荷,現有的定標場地面積難以覆蓋其視場,以敦煌場為例,其均勻場地面積大約只有20 km×20 km。因此,現有的場地定標方法不適用于采用大面陣載荷的靜止軌道光學衛星。
本文針對靜止軌道大面陣光學載荷成像特點,給出了一種基于分時-分視場成像的在軌相對輻射定標方法,可有效解決現有場地難以覆蓋衛星視場而帶來的在軌相對輻射定標難題。
1 定標方法
1.1 定標過程
針對靜止軌道光學衛星面陣相機幅寬大、凝視的特點,盡量選取大面積的亮場、暗場2種均勻場地,對于高分四號這種以我國為主要業務區域的衛星而言,我國近海可用于開展相對輻射定標的暗場,亮場可選擇敦煌隔壁灘或準格爾盆地沙漠等。根據場地面積的大小,可以將相機的視場分為3×3塊區域,或進行更大塊數劃分。分時-分視場的均勻場地在軌相對輻射定標具體的定標過程分為以下步驟,如圖1所示。
① 對于劃分的每塊局部視場區域,選擇多幅不同時間相同場地的均勻場圖像,暗場使用海洋場,亮場首先使用沙漠場地。
② 對不同時間相同場地的多幅均勻場圖像進行逐像元統計,獲得多幅圖像平均后每個像元的均值,以進行相對定標系數計算。
③ 對每塊局部視場區域,使用均勻場地2點定標法,利用亮場、暗場不同時間相同場地的多幅均勻場圖像平均結果,計算局部視場區域內探測元的相對定標系數,并進行相對校正。
④ 根據校正后的圖像并利用相鄰局部視場區域的均勻場統計結果,計算相鄰局部視場區域之間的相對定標系數。
⑤ 結合每塊局部視場區域內的相對定標系數、局部視場區域之間相對定標系數將全視場探元相對校正到一致。

圖1 分時-分視場在軌相對輻射定標過程Fig.1 Workflow of relative radiometric calibration method
1.2 局部視場區域相對輻射定標系數計算算法
當衛星對均勻場成像時,地表的照明、反射、大氣相同,到達相機各探測元的輻射量也是相同的。對面陣相機,可以通過統計多幅相同場地的均勻場圖像,使用多幅圖像的均值消除均勻場地的不穩定性。其輸入/輸出:
(1)
式(1)可變形為:
(2)
按照式(1),對均勻場內全體探元測量求平均,有:
(3)
式中,N為該相機單元探測器的數量。將式(2)代入式(3):
(4)
令
則,式(4)可改寫為:
(5)
對面陣相機,為求解Kλ;i,j,Bλ;i,j,需要具有輻亮度不同的2個均勻場地,且對每個輻亮度均勻場的多幅圖像進行統計,通過聯立方程解算得到Kλ;i,j,Bλ;i,j。
當衛星相機經過高輻亮度均勻場時,根據式(5),有:
(6)
同理,衛星相機經過低輻亮度均勻場時,有:
(7)
聯立式(6)和式(7)解得各探元相對定標系數、相對截距:
(8)
(9)

1.3 區域視場間相對輻射定標系數計算算法
區域視場間相對定標系數解算的基本原理為:相鄰區域視場在成像時地物相同,它們的輸入輻射相同,因此可將其響應相對校正到一致。以內側的區域邊緣探測元為參照,計算重疊區(相鄰探元)外側區域探測元的相對定標系數。
經均勻場校正后內側區域的邊緣探測元第i行第j列的灰度值DN’λ;i,j;int為:
DN’λ;i,j;int=Kλ,i,j;intDNλ;i,j;int+Bλ,i,j;int。
(10)
重疊視場區外側區域邊緣的探元經相對校正后第i行第j列的灰度值DN’λ;i,j;ext為:
DN’λ;i,j;ext=Kλ,i,j;extDNλ;i,j;ext+Bλ,i,j;ext。
(11)
視場區域間相對定標以內側為參照,將外側相對校正到與內側相等:
DN’λ;i,j;int=Cλ,extDN’λ;i,j;ext+Cλ,0,ext。
(12)
為解算區域間相對定標系數Cλ,ext,Cλ,0,ext,按照式(12)對得到的圖像(行、列)灰度求平均:
(13)
令式(13)-式(12),而后兩邊取平方再求和,有:
(14)
根據式(14)計算得到該外側的區域相對校正系數Cλ,ext:
(15)
根據式(14)計算得到該外側的區域相對校正截距Cλ,0,ext:
(16)
1.4 全視場探元一致性校正算法
根據上述過程解算得到均勻場的每塊視場區域內定標系數、每塊視場區域間相對定標系數后,以中央區域為參照,將全體探元相對校正到一致,具體的過程是先校正臨近中央的局部視場,而后逐步向外擴展,最后校正整個傳感器邊緣上的區域。以3×3個分區的中央及右中、右下3個區域相對定標為例,對相對校正過程進行說明。
中央區域各探元的均勻場相對定標系數為:Kλ;i,j;c,Bλ;i,j;c;
右中區域各探元的均勻場相對定標系數為:Kλ;i,j;r1,Bλ;i,j;r1;
右下區域各探元的均勻場相對定標系數為:Kλ;i,j;r2,Bλ;i,j;r2;
i,j分別表示各探測元在區域上的位置。
右中區域的區域相對定標系數為:Cλ,r1,Cλ,0,r1;
右下區域的區域相對定標系數為:Cλ,r2,Cλ,0,r2。
中央區域傳感器獲取圖像的相對校正:
DN’λ;i,j=Kλ;i,j;cDNλ;i,j+Bλ;i,j;c。
(17)
右中區域傳感器獲取圖像的相對校正:
DN’λ,i,j=Cλ,r1(Kλ;i,j;r1DNλ,i,j+Bλ;i,j;r1)+Cλ,0,r1。
(18)
根據右中區域相同的相對校正方法,可以將左中區域及上中區域、下中區域傳感器獲取圖像相對校正到一致。
右下區域傳感器獲取圖像的相對校正:
DN’λ,i,j=Cλ,r1[Cλ,r2(Kλ;i,j;r2DNλ,i,j+Bλ;i,j;r2)+Cλ,0,r2]+
Cλ,0,r1。
(19)
根據右下區域相同的相對校正方法,可以將左上區域、左下區域、右上區域傳感器獲取圖像相對校正到一致。
2 仿真分析
通過仿真分析,驗證分時-分視場在軌相對輻射定標方法的有效性,使用仿真生成的9塊(實際定標可按照定標場地面積確定局部區域的塊數)局部視場區域圖像進行相對輻射定標。
對于每塊局部視場區域,分別仿真生成3幅高亮和低亮圖像,計算每塊局部視場區域圖像相對輻射定標系數,得到校正后的圖像,如圖2所示。可以看出,原始圖像中間亮,四周暗,并且有很多斑點,校正后圖像斑點去除,且亮度相對均勻,說明得到的定標系數對單塊局部視場區域圖像均勻性校正有效。

圖2 單塊局部視場區域相對輻射校正前后對比Fig.2 Comparison of single local view region before and after relative radiometric calibration
依次計算每塊局部視場區域的定標系數和相鄰視場區域定標系數,最后利用這些定標系數將全視場圖像校正一致。圖3是單塊局部視場區域校正和全視場校正后的效果比較圖。可以看出,單塊局部視場區域圖像校正后圖像較均勻一致,而局部視場區域圖像間亮度差別較大,全視場校正后整個視場的圖像亮度都比較一致,說明得到的定標系數對全視場區域圖像均勻性校正有效。
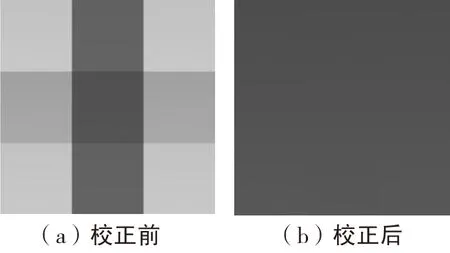
圖3 全視場相對輻射校正前后對比Fig.3 Comparison of all-view region before and after relative radiometric calibration
3 定標精度分析
影響光學衛星相對輻射定標精度的因素主要來自所選取均勻場地的均勻性、傳感器自身響應度的不一致性、重復穩定性、響應線性和太陽光源的不均勻性[10-11]。其中,傳感器自身響應度的不一致性經過相對輻射定標基本可以消除;傳感器自身的重復穩定性、響應線性在傳感器研制完成后基本是固定不變的,認為這2項誤差均優于1%;晴朗條件下,太陽光源的不均勻性優于0.19%[12]。因此,均勻場地的均勻性基本上是影響相對輻射定標精度的唯一不可控因素。大部分輻射定標均勻場地(如甘肅-景泰、內蒙-貢格爾草原、中國內蒙-科爾沁沙地、敦煌等)的均勻度優于3%,如果使用較低分辨率的衛星影像數據,這些輻射定標均勻場地的均勻度可達到2%。此外,海洋等暗場的均勻度優于陸地場。綜合考慮分時-分視場一致性因素,根據定標試驗誤差分析,當選取的均勻場地均勻度優于2.6%時,相對輻射定標精度可達到3%。
4 結束語
針對靜止軌道光學衛星大面陣載荷在軌相對輻射定標難題,充分發揮其凝視成像、姿態機動靈活的優勢,采用分時-分視場的定標方法,有效解決了現有均勻場地面積難以覆蓋大面陣載荷視場從而無法開展定標試驗的難題,并通過仿真圖像分析驗證了該方法的有效性。本文提出的定標方法可用作靜止軌道光學衛星以及采用大面陣光學載荷的低軌衛星的在軌定標測試。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15