基于Lora通信的塔吊三維空間防碰撞算法研究
2020-02-25 02:20:08宋紅景常攀龍
鐵路技術創新 2020年5期
關鍵詞:區域
宋紅景,常攀龍
(中鐵建設集團有限公司北京中鐵建建筑科技有限公司,北京 100166)
0 引言
隨著我國建筑業高速發展,經常出現施工中多臺塔吊同時作業的情況。對于塔吊作業安全的保障,傳統方式是依靠人工觀察,并通過對講機指揮塔吊司機進行操作[1]。這種方式不但占用大量人力資源,并且可能發生人員疲勞、走神情況,造成安全隱患。塔吊安全性能要求非常高,且存在較高事故發生率,如何安全、高效地操作塔吊,是行業內亟待解決的問題之一[2-3]。無論是單塔吊運行,還是大型工地塔群同步作業,防止在施工中發生碰撞,對于安全生產有著極其重要的意義[4-5]。
據統計,出現塔吊安全事故主要有設計、制造和使用3 個方面原因[6]。其中,最常見是使用原因,主要包括:(1)違章操作或誤操作;(2)沒有安全保護裝置或保護裝置失效;(3)管理不當或維修保養不到位;(4)外部環境因素,如臺風、泥石流、地震等。研究采用塔吊三維空間防碰撞算法,搭建一套基于物聯網技術的塔吊防碰撞系統,應用并測試該算法的正確性、及時性和安全性,以解決上述問題。
1 塔吊防碰撞系統架構設計及信息共享
1.1 系統架構
塔吊防碰撞系統由塔吊運行在線監督管理平臺、塔吊專項施工方案設計軟件、監控硬件設備、數據傳輸系統4部分組成。將塔吊運行姿態實時數據、防碰撞算法及預警報警系統集成于塔吊駕駛室中顯示儀器上,從而有效地輔助塔吊司機進行高空作業。
1.2 傳感器搭建
塔吊輔助駕駛系統傳感器主要有高度傳感器、幅度傳感器、回轉傳感器、傾角傳感器、質量傳感器和風速傳感器等6類,傳感器通過串口,將實時數據傳輸至輔助駕駛儀的PCB 板。高度傳感器和幅度傳感器安裝于起升卷揚機和變幅卷揚機的機械限位處,分別實時記錄吊鉤的離地高度和塔吊小車的伸縮幅度;回轉傳感器安裝于回轉機構多功能行程限位器處,記錄塔吊的回轉角度;傾角傳感器安裝于塔機回轉機構處,用于檢測塔機的傾斜度;質量傳感器安裝于吊臂起升纜繩定滑輪內,實時采集吊物的質量;風速傳感器安裝于塔帽處,記錄實時風速。傳感器預警機制見表1。

表1 傳感器預警機制
1.3 Lora通信
Lora 通信技術是一種基于擴頻技術的無線傳輸方案,可實現低功耗、遠距離傳輸。輔助駕駛儀的PCB板內置Lora 通信模塊,主板對高度、幅度、回轉等實時數據進行處理,然后傳遞給塔吊物聯網網關,并形成分布式自組網。塔群間可通過Lora 通信,實時動態傳輸并共享自身運行參數。塔群自組網示意見圖1。圖中,塔吊a 可實時接收相鄰塔吊b、d 的工況參數,通過防碰撞算法計算,發出相應的預警及控制信號,并通過輔助駕駛儀內嵌程序算法,實現防碰撞功能。

圖1 塔群自組網示意圖
2 防碰撞算法研究
塔吊作業時,常出現塔吊與周圍房屋、附近山體等發生區域碰撞,或人為原因造成的塔群碰撞,分別從這2 個方面進行防碰撞算法研究,有效防止碰撞發生。
2.1 區域防碰撞算法
塔吊在施工作業時,一旦塔吊位置確定,其平衡臂一般不會與障礙物發生碰撞。可能發生碰撞的部位一般有大臂、鋼絲繩、吊鉤、吊物等。區域碰撞投影示意見圖2。
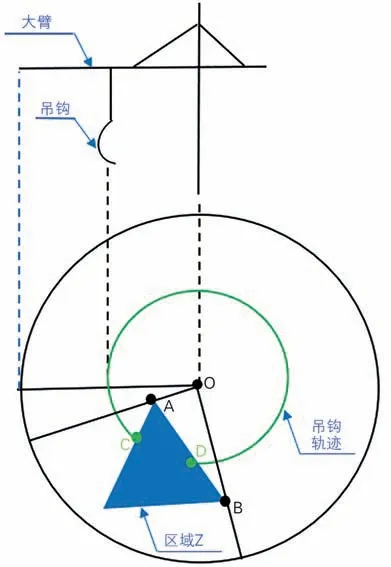
圖2 區域碰撞投影示意圖
圖中,區域Z(三角形區域)為塔吊作業時的障礙物(限行區域)。當塔吊吊鉤最下方高度超出障礙物最大高度安全距離以上,或塔吊最上方高度超出障礙物最小高度安全距離以上時,不可能發生碰撞,塔吊可在與障礙物高度臨界值安全距離以上回轉運行;當塔吊大臂高度介于障礙物高度之間,并運行至∠AOB扇形AO邊一側的安全臨界值A點時,算法程序輸出信號并切斷繼電器,限制塔吊逆時針旋轉,但可順時針旋轉(當大臂運行至∠AOB扇形BO邊一側時同理);當障礙物最高點位于大臂和吊鉤之間時,鋼絲繩或吊鉤可能和障礙物發生碰撞,大臂運行至C點(或D點)時,算法程序限制塔吊逆時針(或順時針)旋轉,但可反方向或上下運行。
2.2 塔群防碰撞算法
塔群間通過無線高速模塊進行姿態數據交互,計算本地塔吊與干涉塔吊是否存在碰撞點及碰撞具體位置。根據塔吊姿態數據對碰撞點進行預警報警,并解除塔吊司機的相應操作,以防止碰撞。
2.2.1 塔吊間是否存在碰撞
對于塔吊間是否存在碰撞,可從水平維度判斷。所有塔吊都以塔基為圓心、大臂為半徑做圓周運動,即大臂是塔吊與外部物體發生接觸的最大范圍。根據塔基坐標,計算塔基之間距離是否大于相鄰塔基大臂長度之和。若塔基之間距離不大于大臂長度之和,可能發生碰撞。
塔吊臂長關系示意見圖3。圖3(a)長度關系為:L(O1O2)>L(O1A1)+L(O2A2),2 個塔吊不可能發生 碰 撞;圖3 (b) 長 度 關 系 為:L (O1′O2′) <L(O1′A1′)+L(O2′A2′),2個塔吊可能發生碰撞。

圖3 塔吊臂長關系示意圖
在此判斷基礎上,在對方塔吊靜止且本地塔吊實時作業狀態下,先找到對方大臂線段O1A1,再以本地塔吊塔基O2為圓心、大臂O2A2為半徑作圓,求線段O1A1與圓是否相交。若線段O1A1與圓相交,對方塔吊在本地塔吊運行范圍內可能發生碰撞。
塔吊碰撞關系示意見圖4。圖4(a)不存在碰撞可能;圖4(b)圓內線段A1′A2′上每個點都可能與本地塔吊大臂發生碰撞。

圖4 塔吊碰撞關系示意圖
2.2.2 塔吊間是否發生碰撞
對于塔吊間是否發生碰撞,可從空間垂直維度判斷。根據前文計算,塔吊之間在線段CB上存在碰撞可能。但是,塔吊之間為三維空間,不在1個坐標參考系,無法進行比較,需要將2臺塔吊可能發生碰撞的大臂斜拉梁放入參考系進行比較判斷。塔吊三維空間關系示意見圖5。
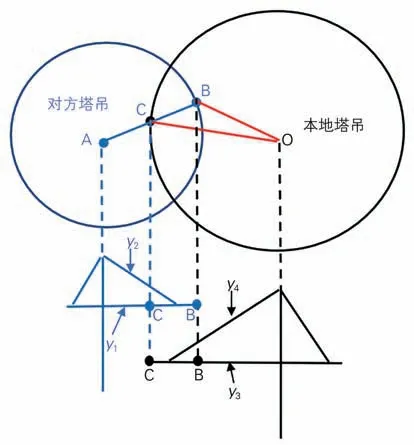
圖5 塔吊三維空間關系示意圖
圖5 中,2 臺塔吊都可能運行至線段CB,CB 相當于塔吊大臂的地面投影,以CB為x軸,大臂在x軸投影點的高度為y 軸,C 點為x 軸圓點,B 點為正方向。CB投射至塔吊大臂,可確立各自的直線方程。
對方塔吊直線方程:

本地塔吊直線方程:

式中:k1、k2、k3、k4、b1、b2、b3、b4值是基于各自塔吊的規格,根據投射到CB 的高度計算出的結果。根據式(1)、式(2)進行相互代入計算,可得碰撞點在x 軸的位置,若碰撞點在CB,則表示在運行區間內會發生碰撞;若碰撞點不在CB,如小于0 或者大于CB 長度,則表示在碰撞范圍內部會發生碰撞。
相對于大臂碰撞,吊鉤(或鋼絲繩)碰撞的可能性更大。若本地塔吊高度低于對方塔吊吊鉤或本地塔吊吊鉤高于對方塔吊斜臂拉梁,吊鉤不存在碰撞對方塔吊的可能性,無須進行計算。吊鉤是否存在碰撞可以采用線段與圓是否相交的方式進行判斷。吊鉤與大臂碰撞示意見圖6。
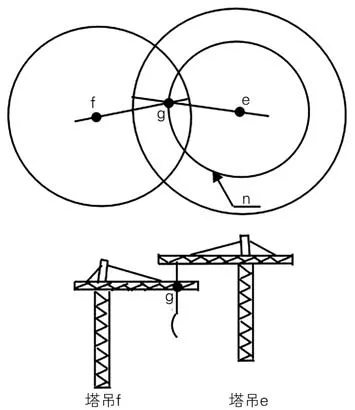
圖6 吊鉤與大臂碰撞示意圖
圖6 中,箭頭n 所指圓圈表示塔吊e 的吊鉤運行軌跡,2 個塔吊存在交點g,利用上面確立的方程計算對方塔吊f 在g 的最高點,與塔吊e 的掛鉤進行判斷,根據設定的報警范圍判斷碰撞可能性。
實際情況中,在不規則障礙物和塔群結構的邊緣設置了預警閾值,為方便理解,以上各碰撞點預警閾值設為0。其他碰撞類型分析方法類似,不再贅述。
3 算法測試
就區域碰撞和塔群碰撞2個方面通過塔吊模型模擬真實環境,有效測試算法的實現。
3.1 區域碰撞
首先搭載2 臺塔吊模擬機和2 套防碰撞算法系統,在輔助駕駛儀中導入算法程序軟件并調通串口及協議;在區域吊裝功能選項中,設置區域類別、區域方式和限制高度。當塔吊進入到限行區域安全距離臨界值時,軟件頁面右下角碰撞報警燈閃爍鳴聲,同時限制塔吊向相同趨勢運行(見圖7)。
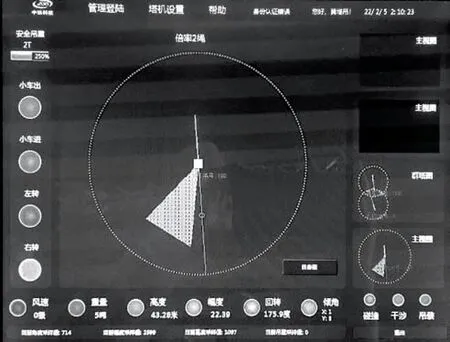
圖7 區域碰撞報警界面
3.2 塔群碰撞
通過在防碰撞系統里依次設置塔吊坐標、防碰撞報警參數、Lora 模塊參數,建立塔吊之間的數據通信。當操作1臺塔吊進入預先設置的安全閾值時,輔助駕駛儀屏幕右下方干涉燈閃爍并發出報警聲,同時系統限制塔吊向相同趨勢運行(見圖8、圖9)。

圖8 塔群碰撞報警界面

圖9 塔吊碰撞實時狀態
4 結束語
研究重點討論的是防碰撞算法,通過對多種型號的塔吊進行調研,建立參數數據庫。經多次實際測量和系統優化,保證塔吊實時作業動態采集數據精度值。針對系統安全性和應急事件,進行簡單說明:該防碰撞理論和處理程序是構成塔吊輔助駕駛系統的一部分,無特殊情況不會發生異常或失效,只起到在碰撞發生前輸出信號保證駕駛減速或限行的輔助駕駛作用,不會擾亂并惡意控制塔吊駕駛系統本身運行。當出現特殊情況導致防碰撞系統失效,塔吊司機還是可以根據自身經驗駕駛塔吊小車運行。另外,整體輔助駕駛系統中有1個攝像頭安裝在駕駛室,實時捕捉塔吊司機駕駛操作,視頻和傳感器數據分別通過網橋和4G傳輸形式傳遞到在線監督管理系統云平臺(有數據備份功能),為管理部門評價塔吊司機的技能、工作效率、有無違章操作等提供有效數據,具有事故追責可追溯功能,使監督工作落到實處。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15