圓柱殼體振動主動控制中作動器的優化配置
2019-12-25 07:35:28胡澤超
船舶力學 2019年11期
胡澤超,何 琳,李 彥
(海軍工程大學a.振動噪聲研究所;b.船舶振動噪聲重點實驗室,武漢430033)
0 引 言
近年來,隨著高性能結構的發展,其振動抑制受到了越來越多的關注與研究。艦船設備的生命力在較大程度上會受到不良振動的影響,嚴重時可能會導致系統失穩而無法正常工作。抑制結構振動的方法主要有被動控制、主動控制和主被動混合控制等技術。目前,機械設備振動的被動隔振技術已廣泛地應用于船舶工程中,其中橡膠隔振器、鋼絲繩隔振器和氣囊隔振器等被動隔振器對船舶動力機械設備振動中高頻寬頻段的振動隔離有著良好的控制效果,但對艦船大型旋轉往復機械設備低頻線譜的控制效果不佳。隨著對艦艇隱身性能要求的進一步提高,有必要引入次級振源對結構低頻線譜進行主動控制[1]。
目前振動主動控制技術的研究主要分為三個方面:(1)作動器與傳感器的設計與研制,特別是研制具有優良特性的作動器;(2)主動控制算法的改進;(3)作動器與傳感器在結構振動主動控制中數目優化以及作用位置優化[2]研究。
在結構振動的主動控制中,作動器的作用位置決定了隔振系統的可控性,其合理布置可實現設備結構振動低頻線譜的有效隔離。作動器的不當配置可能會激發出未控模態的響應,使系統振動處于不可控狀態,甚至使系統失穩。因此,研究作動器作用位置的優化配置對結構低頻線譜的衰減有著至關重要的作用。
作動器位置優化的設計主要從優化布置準則和優化布置算法兩個方面考慮。作動器的優化布置,簡言之,即通過分析系統的結構特性,選擇合適的優化布置準則來建立其作用位置的目標函數,利用合理的優化布置算法求解目標函數最優值的問題。Isabelle[3]利用可控可觀性準則,設計了彈性板上壓電作動器和壓電傳感器優化布置位置。Jung[4]將壓電作動器和傳感器以對位配置的方式安裝在圓柱殼體上,根據可控可觀Gramian 矩陣求解作動器在圓柱殼體上作用位置的分布系數矩陣,采用遺傳算法對確定數目的作動器/傳感器的位置目標函數進行優化,得到了壓電作動器和壓電傳感器在圓柱殼體上的最優分布位置。馬扣根[5]以柔性結構為研究對象,提出了一種基于模態可控度的作動器/傳感器優化位置的度量指標。張志誼[6]利用Gramian 矩陣象空間和零空間與模態可控可觀性之間的關系,給出了一種評價模態可控可觀度的方法。劉瀟翔[7]研究撓性結構包含的密集模態,通過可控Gramian 矩陣的分塊解析形式,降低了求解的可控度,提出了作動器的優化配置方法。以上研究結果表明:基于系統可控可觀性準則,對于作動器/傳感器在結構振動主動控制中進行配置優化方法的研究具有一定的應用前景。
對于作動器/傳感器在結構振動主動控制中優化布置問題的相關研究,大多采用遺傳算法。粒子群算法具有參數設置簡單、隨機性強、搜索效率高和搜索能力強等優點。相關學科的研究及其應用表明,粒子群算法具有比其它隨機類算法的計算效率更高的特點,因此利用粒子群算法優化作動器/傳感器的作用位置對結構振動的主動控制有重要的意義。
本文研究并設計結構中作動器的最優作用位置,以圓柱殼體為研究對象,建立有限元模型,根據離散系統可控可觀性準則建立系統的狀態空間方程,利用粒子群智能算法來求解作動器的最優作用位置,并通過殼體振動主動控制實驗對理論分析方法進行驗證。針對圓柱殼體,建立一種作動器的優化布置方法,從而有效地衰減傳遞到殼體上的振動。
1 作動器的優化布置準則
在結構振動主動控制中,作動器的不當配置可能會導致控制系統控制效果的下降,嚴重時會影響到隔振系統的穩定性甚至使系統失穩[8],因此需要引入合理的配置準則來解決作動器的優化布置問題[9]。
目前,國內外對于確定數目下作動器作用位置優化的研究較多,已形成了一些基于不同優化準則的系統理論。由于不同的優化準則可能會產生不同的布置方案,在控制效果上有所差異,因此優化準則的選用尤為重要。針對結構振動主動控制,到目前為止許多專家提出了多種不同的理論優化準則,主要有:(1)可控可觀性準則;(2)能量準則;(3)系統響應準則;(4)可靠性準則;(5)控制溢出準則。通常對于這些準則,根據結構的特征和控制要求等方面的權衡,才能最終決定采用何種準則[10]。基于所研究的控制系統為閉環控制系統,可以從系統能量的角度出發進行研究:在達到同等控制效果的情況下,作動器的輸出能量最小,傳感器接收的觀測信號最大。基于研究的角度,可基于可控性準則對結構中作動器作用的位置進行優化配置。
1.1 系統狀態空間方程的建立
根據可控可觀性準則,采用有限元法建立受控結構的動力學微分方程:

式中,M ∈Rn×n為質量矩陣;C ∈Rn×n為阻尼矩陣;K ∈Rn×n為剛度矩陣;x ∈Rn×1為位移列向量;u ∈Rr×1為作動器控制力輸出列向量,其中r為作動器的個數;B ∈Rn×r為作動器的位置矩陣;y ∈Rs×1為系統的測量列向量,其中s為傳感器的數目;Dd∈Rs×n、Dv∈Rs×n和Da∈Rs×n為系統的輸出系數矩陣,當采用加速度傳感器時,Dd= Dv= 0;D為與作動器控制力有關的系數矩陣。
由模態疊加原理,系統的位移響應可表示為

其中,Φi為系統第i階振型向量,Φ={Φ1,Φ2,…,Φn} ;ηi為第i階模態坐標,η={η1,η2,…,ηn}T。將(2)式代入(1)式,可得

其中,Dr= diag( 2ξ1ω1,2ξ2ω2,…,2ξnωn);Γ 為n×r 作動器系數影響矩陣和分別為s×n 的傳感器位移、速度和加速度系數影響矩陣;ξi為系統的第i階模態阻尼比,ωi為系統的第i階模態頻率,i =1,2,…,n。
假設被控模態數目為nc,j = 1,…,nc,此時(3)式可表示為
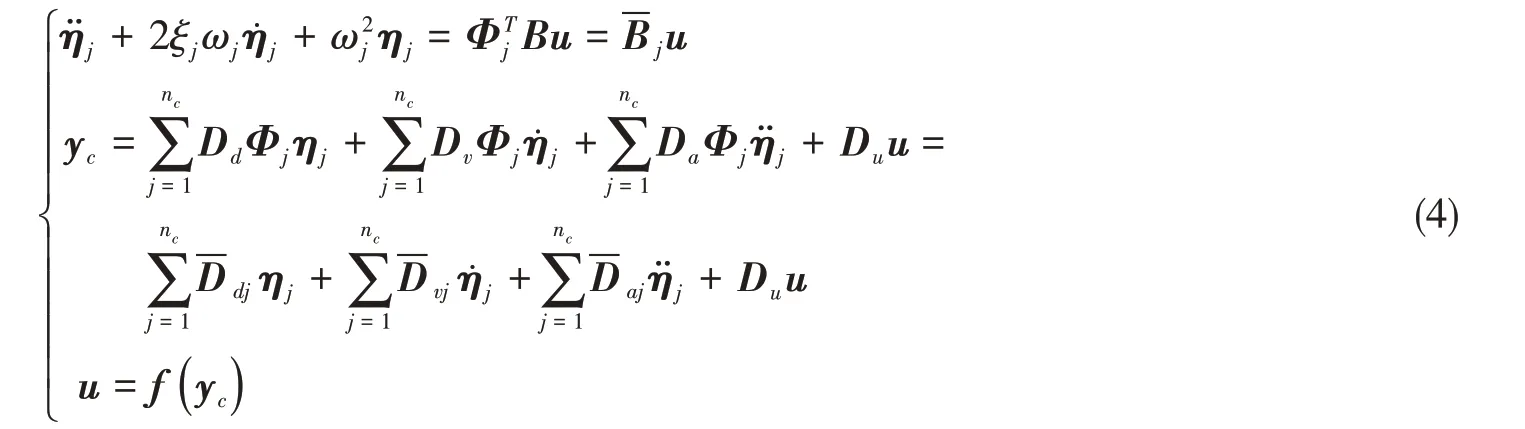
式中f ( ?)為傳感器采集到的信息矩陣和控制力的函數關系。令p( t )=[ η1ω1η1…ηnωnηn]∈R2n,可將(4)式轉化為系統的狀態方程:

式中,矩陣A 與系統結構有關,由系統的特征頻率和阻尼比所決定;矩陣B 與作動器配置矩陣L ∈Rn×r有關;矩陣C′為傳感器的信號輸出矩陣,由傳感器的類型和布置位置決定。由文獻[12]可知:

控制力輸入矩陣B 的列數等于作動器的數目r,信號輸出矩陣C′的行數為傳感器的數目s。若采用誤差傳感器和作動器對位配置的方法,則有C′= BT。
1.2 作動器的優化配置方法
對于作動器作用位置設計方面的研究,配置準則的確立是首先需要解決的問題。作動器優化配置準則的選用主要分為兩步:(1)確立能夠滿足系統控制需求的合適的優化準則;(2)根據優化準則來確定待優化元器件位置的配置指標即目標函數。
由可控可觀性準則,可利用可控Gramian矩陣[11]求解作動器的最優作用位置。假設在t = 0時系統的初始狀態為p0,若規定在t= tf時刻系統的狀態為ptf,為了使作動器輸出的控制能量Jc最小,可以定義(8)式所示的目標函數:

由文獻[13]可得:

式中Wc( tf)為控制系統可控Gramian矩陣。
將(9)~(10)式代入(8)式,可得目標函數的變換形式:

根據Lyapunov方程,可得:

Wc的特征根λi對作動器的控制性能起著決定性的作用,因此作動器的控制性能指標可以定義[4]如下:

式中,n為柔性結構模型中的模態數,σ( λi)為可控Gramian矩陣Wc特征值的標準差。為了使作動器的控制性能最好,目標函數PIc的值應盡可能大,即可控Gramian矩陣Wc的每個特征值λi都盡可能的大,最大的PIc值所解出作動器的位置系數矩陣L就決定了作動器的最優分布位置。
2 粒子群優化算法
粒子群算法(簡稱PSO)是受鳥群捕食行為啟示而提出的一種隨機類搜索算法。相比較于其他的群智能算法,PSO 算法具有效率高、求解速度快和參數設置簡潔等優點,在很多學科領域得到了廣泛的應用。在基本PSO算法中,粒子的搜索速度和位移由兩個迭代方程組成[9]:

式中,vid( t )和xid( t )分別為t 次迭代后第i 個粒子第d 維速度分量和位移分量,w 表示慣性權重因子;pid為第i個粒子在t + 1次迭代前最優位移的第d維分量;pgd為粒子種群在t + 1次迭代前最優位移的第d維分量;c1和c2為學習因子;r1和r2為服從[0,1]上均勻分布的隨機數。
(14)式中,速度矢量由三部分來更新自身的狀態:(1)wvid( t )代表粒子t 次迭代后的速度矢量,控制w 值可以控制粒子種群的搜索范圍,w 值越大,粒子的全局搜索能力越強,w 值越小,粒子的局部搜索能力越強;(2)c1r1[ pid- xid( t )]代表粒子自我學習的能力,即自我認知能力,其中自我學習因子為c1;(3)c2r2[ pgd- xid( t )]表示群體中粒子個體之間信息共享與相互合作的能力,即社會認知能力,其中社會學習因子為c2。粒子位置更新示意圖如圖1。

圖1 粒子位置更新示意圖 Fig.1 The location update diagram of particle

圖2 圓柱殼體結構Fig.2 The cylindrical shell
3 圓柱殼體上作動器的配置方案
本節以圓柱殼體為研究對象,利用粒子群算法優化目標函數PIc,得到作動器的位置系數矩陣L,進而確定作動器的優化布置方案。
3.1 仿真與實驗模態分析
圓柱殼體的模型如圖2 所示:直徑1 100 mm,殼厚8 mm,長度2 800 mm,材料為1Cr18Ni9Ti,廣泛地應用于機械設備和工程結構中。圓柱殼體的材料屬性如表1 所示。仿真和實驗所得前八階彈性模態見表2,其中m表示周向波數,n表示縱向半波數。
鑒于仿真分析模態與實驗測試模態結果相差不大,所建立的仿真模型是可靠的,可從仿真模型中提取前8階相關振型數據用于分析計算。
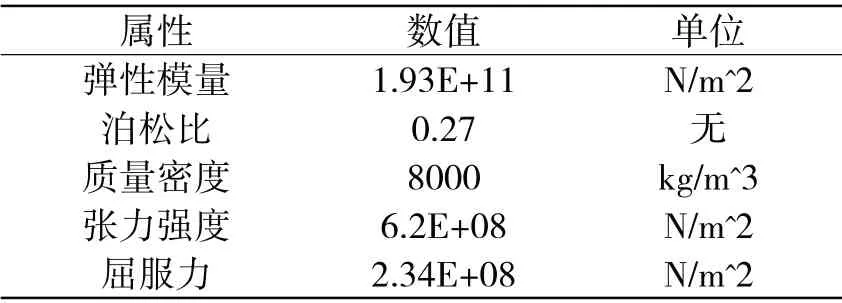
表1 殼體材料屬性Tab.1 Material properties of the shell

表2 圓柱殼體前八階模態Fig.2 The first eight-order modes for cylindrical shells
3.2 作動器最優布置方案
假定殼體的模態阻尼比為0.01,根據仿真結果,前八階模態貢獻量大于95%,因此提取前八階模態振型數據參與計算,根據(6)式可求得Lyapunov 方程中與系統結構有關的矩陣A16×16。由(6)和(7)式可求得系統矩陣A 和輸入矩陣B 及其與作動器位置矩陣L 的關系,由(13)式可確定可控Gramian 矩陣Wc,進而可根據與Wc的特征值λi相關的方程來確定作動器的位置系數矩陣L。接下來利用PSO算法對目標函數(13)式中PIc進行優化。本節采用改進的粒子群算法RandWPSO對PIc進行探索求值,其中慣性權重因子w按(16)式取值,具體參數設置[14]為:c1=c2= 0,N = 40,μmax= 0.8,μmin= 0.5,σ = 0.2,M = 1 000,r = 1,2,…,9,其中N為粒子種群數量、M為最大迭代次數,得到作動器數目和最優分布節點的位置關系如表3。

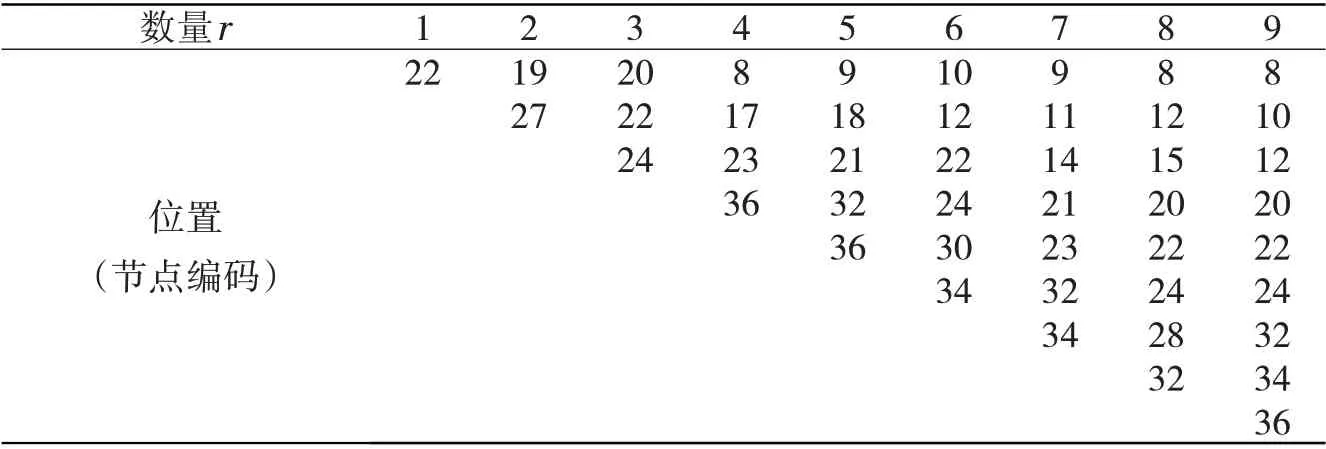
表3 作動器優化布置數量和作用位置關系Tab.3 Relationship between number and position of optimal arrangement of actuators
本文采用3個作動器對殼體進行主動控制實驗,誤差傳感器與作動器對位配置,分別作用在編號為20、22和24節點上。此三個節點在圓柱殼體的中心截面上均勻分布。殼體上作用位置的節點編碼如圖3所示,圖4為圓柱殼體表面經過節點1的母線展開的平面圖。
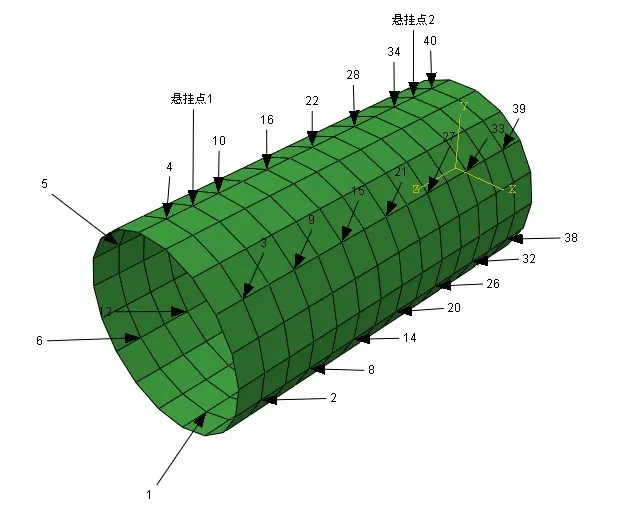
圖3 作動器的作用位置編碼 Fig.3 Positional encoding of actuators
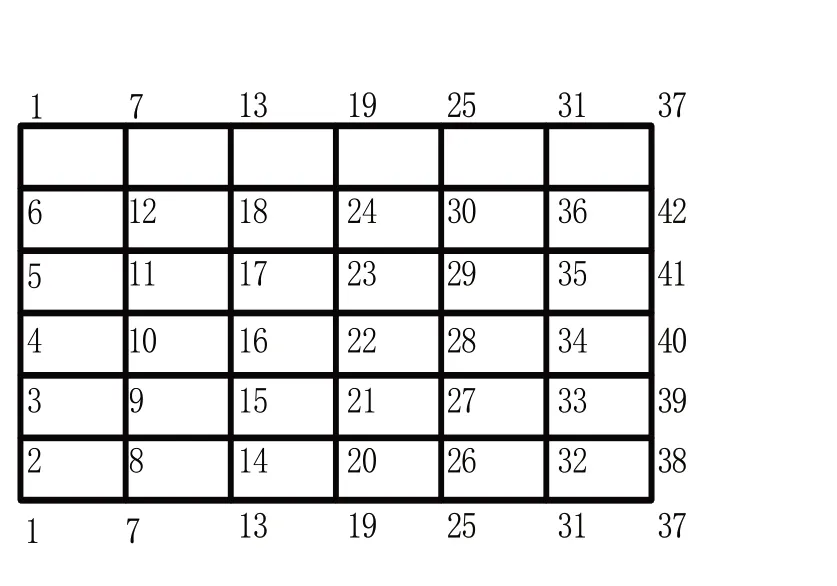
圖4 編碼順序展開圖Fig.4 Coding sequence diagram

圖5 試驗平臺搭建圖 Fig.5 The construction of the experimental platform
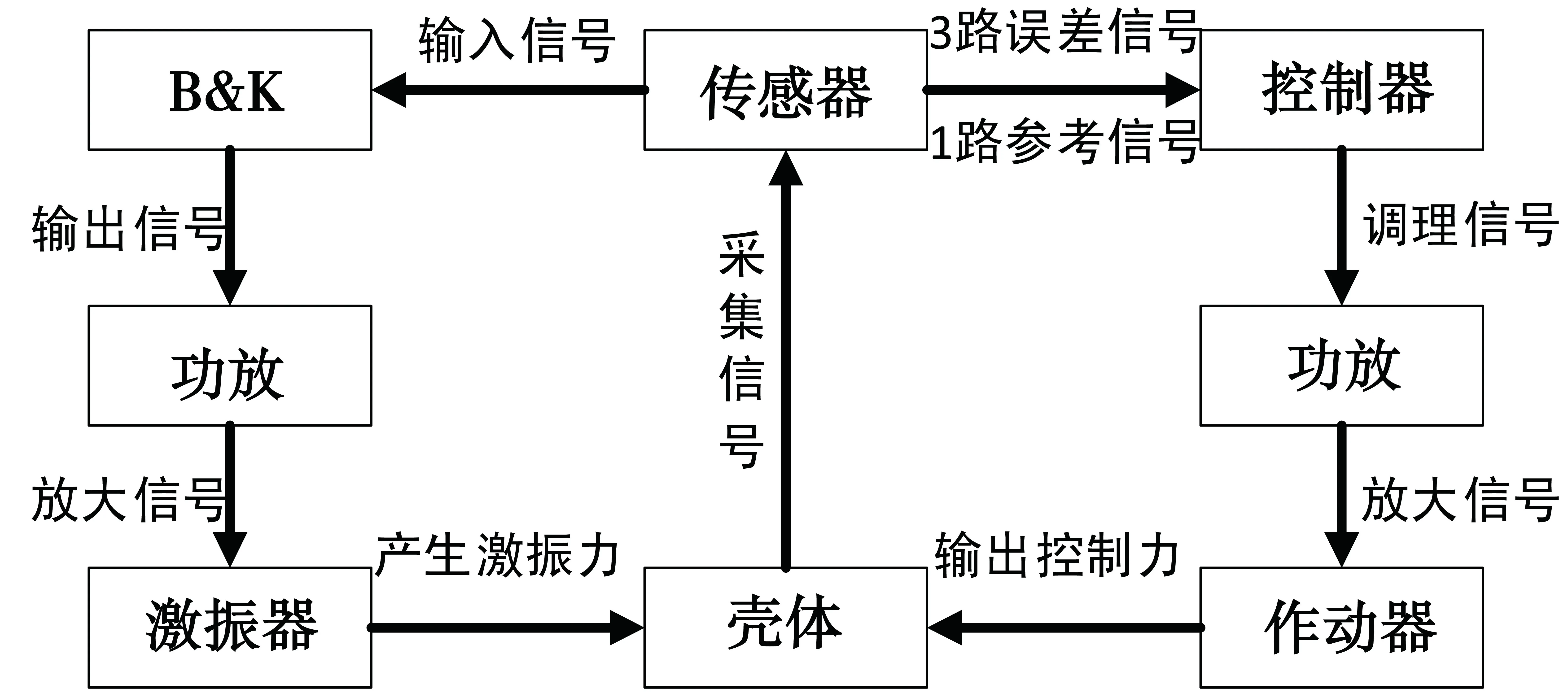
圖6 設備儀器連接圖Fig.6 The connection diagram of laboratory equipment
4 主動控制實驗
為了驗證作動器理論優化位置控制效果,設置三組不同作動器的布置方案進行主動控制實驗,并與理論優化布置方法的實驗結果進行對比分析。
4.1 理論最優方案的線譜控制實驗
主動控制實驗臺架實物圖如圖5所示,實驗設備通道連接圖如圖6。激振器固定在圓柱殼體安裝鋪板的中心位置處,模擬電機的振動。臺架為艙段吊掛架將圓柱殼體的兩端懸掛約束,圓柱殼體的內表面通過焊接螺母固定慣性作動器,輸出徑向控制力。實驗采用3 個作動器,在殼體縱向截面上呈120°均布,對應的節點編號為20、22和24,作用位置如圖7。
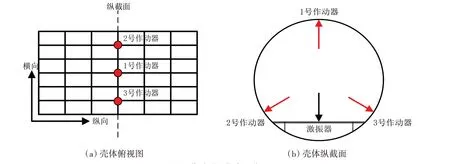
圖7 作動器最優布置位置Fig.7 Optimal position of three actuators
本文采用的主動控制算法為窄帶多通道Fx-Newton 算法[15-16],此法收斂速度要明顯快于FxLMS 算法,且在穩定收斂后能獲得優良的線譜控制效果。在線譜主動控制實驗中,將布置在激振器附近的加速度傳感器作為參考信號,與作動器對位配置的3路加速度傳感器信號為誤差信號輸入到控制器。分別設置激振器輸出頻率為40 Hz、激勵電壓為100 mV的單頻激勵以及激勵頻率為40 Hz+80 Hz、激勵電壓均為100 mV 的組合激勵,模擬電機的兩種工況。作動器和傳感器的布置位置如圖8,其中1~3 號觀測信號為誤差信號,對位的節點編號依次為20、22、24;4 號觀測信號為參考信號,布置在殼體安裝鋪板振源位置附近;5~10號信號為觀測信號,對位的節點編號依次為8、10、12、32、34、36。殼體上9個傳感器的布置位置簡圖如圖8(括號表示視圖方向被遮擋的傳感器編號)。
當激振器輸出頻率為40 Hz、電壓為100 mV的單頻激勵時,得到圖9所示的控制效果(紅色為未控狀態,藍色為受控狀態)。
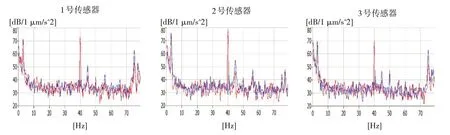
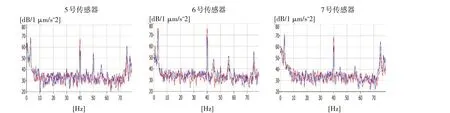
圖9 理論優化組在40 Hz激勵下各觀測點信號控制效果Fig.9 Control effect of each observation point under 40 Hz excitation in the optimal group
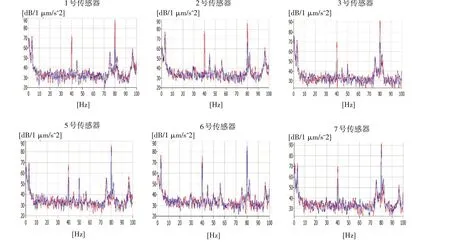
圖10 理論優化組在40 Hz+80 Hz組合激勵下各觀測點信號控制效果Fig.10 Control effect of each observation point under 40 Hz and 80 Hz excitation in the optimal group
當激振器激勵頻率為40 Hz+80 Hz 的雙頻正弦激勵且輸出電壓幅值均為100 mV 時,殼體的控制效果如圖10所示,理論優化組在40 Hz單頻激勵和40 Hz+80 Hz雙頻激勵下的控制效果如表4所示。

表4 優化位置主動控制效果Tab.4 The active control test effect of the optimal placement
4.2 對比控制實驗
為了檢驗理論優化方法的可行性,抽取三組布置方案與優化位置的控制效果進行對比。三組對比實驗對應的作動器的布置方案如圖11 所示,對照組一對應的節點編號為12、22、32,對照組二對應的節點編號為8、10、12,對照組三對應的節點編號為8、24、32。對照組一與對照組二分別在40 Hz 單頻激勵和40 Hz+80 Hz雙頻激勵下的控制效果如表5和表6所示。
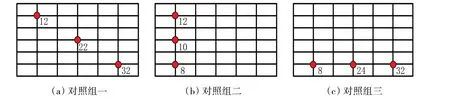
圖11 對比實驗中作動器的布置位置Fig.11 Positions of the actuators in the comparative test

表5 對照組一的主動控制效果Tab.5 The active control effect of the comparative group Ⅰ

表6 對照組二的主動控制效果Tab.6 The active control effect of the comparative group Ⅱ
本節還對圖11(c)所示對照組三的作動器布置方案進行了實驗研究,此方案在控制階段引起了結構的強烈共振,使殼體失控。
4.3 實驗結果
為了檢驗作動器在圓柱殼體上理論優化位置的控制效果,本節進行了主動控制實驗,并設計了三組對照實驗。實驗結果表明,對于40 Hz 單頻激勵力,理論優化組的控制效果最佳,達到了19.36 dB,明顯優于兩組對照組;對照組二次之,總振級衰減達到8.64 dB;而對照組一的布置方法控制效果不佳,僅為0.19 dB。對于40 Hz+80 Hz雙頻激勵,其中對于40 Hz處的激勵頻率,理論優化組控制效果最佳,總振級降低量為13.11 dB;對照組二次之,為8.09 dB;而對照組一的總振級降低量不減反增,為-1.08 dB,殼體振動沒有得到控制。對于雙頻激勵中80 Hz 的激勵頻率,三個實驗組總振級衰減量差別不大,其中對照組二的控制效果最好,為7.62 dB;理論優化組次之,略低于對照組二,控制衰減量為7.23 dB;對照組一控制效果最差,為6.66 dB。對照組三,在40 Hz 單頻激勵或40 Hz+80 Hz 雙頻激勵下,均引起了殼體的強烈共振,導致殼體振動失控。
主動控制實驗結果表明,作動器在圓柱殼體上的理論優化位置的控制效果要明顯好于設置的三組對照組,能夠對振動激勵進行有效的衰減。該實驗驗證了理論分析方法的可靠性:粒子群算法可應用于圓柱殼體中作動器作用位置目標函數的優化求解問題,且理論優化位置在振動主動控制實驗中能夠取得較好的控制效果。
5 結 語
本文以圓柱殼體結構振動的主動控制為研究對象,基于離散系統可控可觀性準則,采用粒子群優化智能算法,提出了一種作動器的優化布置方案,并通過主動控制實驗對理論分析布置方案的可行性進行了分析與驗證。結果表明,粒子群算法可用于解決圓柱殼體上作動器的優化配置問題。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2017年6期)2018-01-22 02:26:40
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44