基于CEEMD的回轉窯監測系統研究
2019-12-20 06:36:54趙宏偉
數字制造科學 2019年4期
趙宏偉,張 云
(1.武漢理工大學 機電工程學院,湖北 武漢 430070;2.武漢理工大學 建材行業回轉窯檢測技術中心,湖北 武漢 430070)
回轉窯是水泥行業的核心設備,它能否正常運轉關系到水泥公司的經濟效益。由于窯長期處于高溫、重載的惡劣工況中,且筒體內部溫度分布不均,回轉窯難免會發生故障。通常,回轉窯主要故障可分為筒體彎曲變形故障和中心線偏移故障[1]。張云等[2]提出了一種筒體彎曲變形測量方法,利用最小二乘法來擬合筒體偏心大小。此外,張云等自主研發了一套精度為0.001 mm的筒體橢圓度測量儀,可有效反映出左右兩側托輪受力相對大小[3]。但這些技術目前還只停留在事后檢測階段,無法及時發現窯的早期故障。如何對回轉窯狀態實時監測,及時發現早期故障信息,國內鮮有研究。現有研究表明:回轉窯能否正常運轉很大程度上取決于托輪的運行狀況[4]。回轉窯工況復雜,前述的兩種故障都會對托輪撓度變化造成影響。因此筆者提出了一種通過對托輪位移信號實時監測來反映回轉窯故障的方法。
1 回轉窯故障對托輪撓度影響分析
回轉窯的整個重量幾乎全部由托輪承受,當回轉窯出現故障時,托輪受力會發生變化。由于每檔處托輪都是對稱安裝的,理論上左右兩個托輪受力大小基本相同。現將筒體與輪帶視為一個整體,以單側托輪作為研究對象,進行受力分析,如圖1所示。
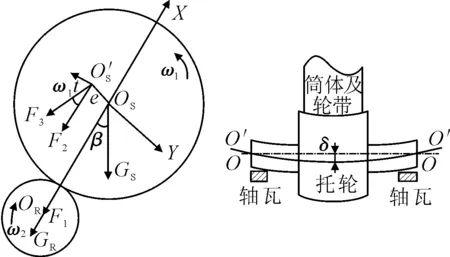
圖1 托輪受力示意圖

F=GR+F1+F2
(1)
式中:F為托輪受到筒體的正壓力;GR為托輪重力沿X軸方向上的分力;F1為托輪受到筒體的靜態載荷;F2為托輪受到筒體的動態載荷。其中,托輪所受到的筒體靜載荷是不變的,大小為:
F1=Msgcosβ
(2)
式中:Ms為筒體在該檔處的等效質量;β為重力方向與X軸夾角,大小一般為30°。設筒體彎曲變形量為e,則其產生的離心力大小為:
(3)
將離心力分解,則在X軸方向上的分力即為托輪受到的動態載荷,大小為:
(4)
將托輪軸簡化為簡支梁模型,兩端固定,中間集中受力為F,根據撓度計算公式可得,托輪受動態載荷所產生的變形撓度值為:
(5)
式中:l為托輪軸的長度;EI為托輪的等效抗彎強度。設托輪受到靜態壓力形成的永久彎曲變形量為δ,則其撓度值為:
s2=δcos(ω2t+φ)
(6)
其中,δ的大小與筒體靜態載荷F1正相關;φ為托輪永久彎曲變形方向與x軸負方向的夾角。則托輪總的撓度值為:
s=s1+s2
(7)
s=kcosω1t+δcos(ω2t+φ)
(8)
其中
(9)
由此可見,托輪位移信號中包含了筒體頻率成分和托輪頻率成分,將其定義為KS(kiln shell)諧波和KR(kiln roller)諧波。筒體彎曲變形程度加深時,托輪位移信號中KS諧波幅值會增大;中心線偏移程度加深時,偏移側托輪載荷增大,此時,托輪位移信號中KR諧波幅值會增大。因此,KS、KR幅值可以用來反映回轉窯故障狀態。
2 故障特征提取方法研究與實驗驗證
2.1 仿真分析
托輪位移信號包含了KS、KR諧波,而如何有效分離出特征諧波成為關鍵。EMD(empirical mode decomposition)分解過程不需要選擇基函數,根據信號自身特點自適應地進行分解,將信號按高頻到低頻分解為若干個IMF(intrinsic mode fuction)分量[5]。對于托輪位移這種非線性、非平穩信號來說,EMD方法是比較適用的。但EMD方法也存在端點效應和模態混疊等缺點。為此,EEMD(ensemble empirical mode decomposition)方法利用高斯白噪聲具有均勻分布的統計特性,可以改變信號中極值點的分布,有效地改善了模態混疊的現象[6]。但EEMD需要增加平均次數來減小重構信號誤差,加大了計算量。
CEEMD(complementary ensemble empirical mode decomposition)方法在EEMD方法的基礎上,通過添加一對相反的白噪聲信號來減少重構誤差[7]。其具體算法如下:
(1)給定循環處理次數N和幅值強度系數α,并計算原始信號標準差σ=std(x)。

(10)
(11)
(4)重復步驟(2)、(3)N次,消除高斯噪聲,作均值化處理。即原始信號分解得到的IMF分量ck(t)可表示為:
(12)
針對EMD、EEMD和CEEMD 3種方法,通過模擬托輪位移信號來對比它們對托輪位移信號分解的可行性。假設回轉窯筒體旋轉周期為16.5 s(0.06 Hz),采用仿真信號s2(t)表示,托輪旋轉周期為5 s(0.2 Hz),采用仿真信號s3(t)表示,考慮到回轉窯現場工況,添加了間歇振蕩噪音信號s1(t),則仿真信號s(t)可表示如下:
s(t)=s1(t)+s2(t)+s3(t)
(13)
其中,s2(t)=0.8×sin(2×pi×t×0.06),s3(t)=sin(2×pi×t×0.2)。
仿真信號s(t)及各成分波形如圖2所示。EMD、EEMD、CEEMD 3種方法對托輪位移仿真信號的分解結果如圖3所示。
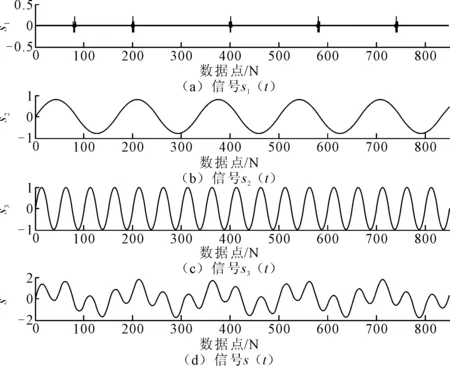
圖2 托輪位移仿真信號
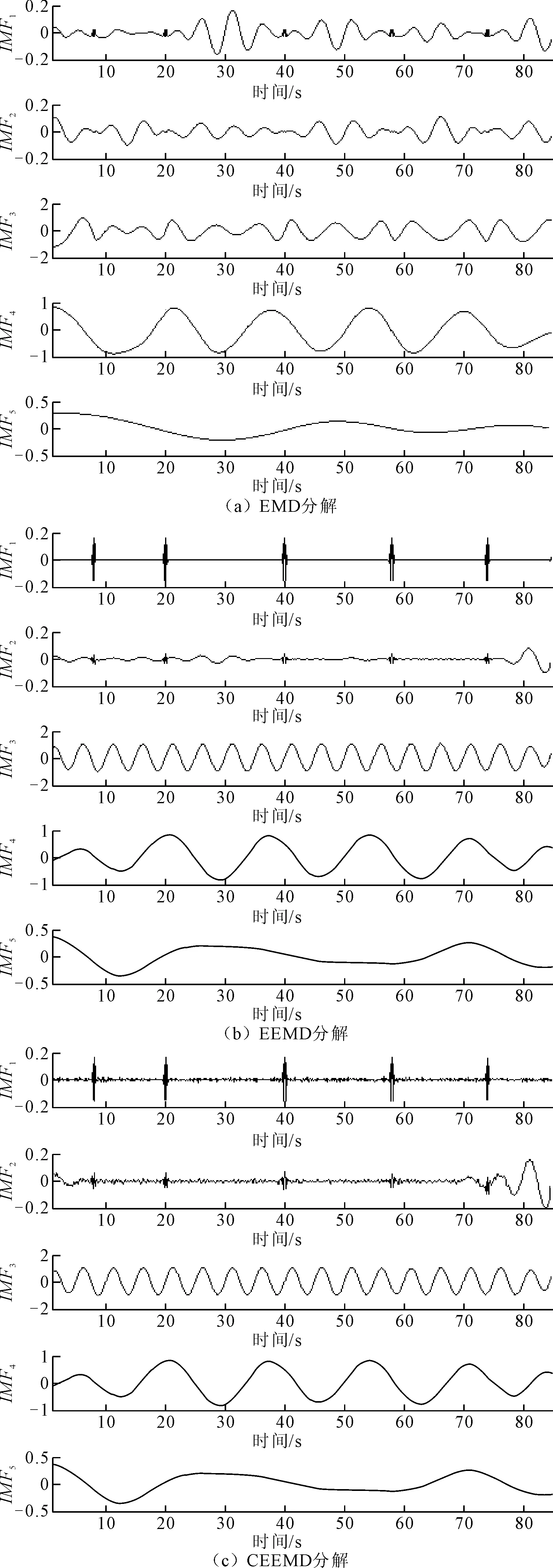
圖3 仿真信號3種方法分解結果
由圖3(a)可知,該仿真信號的EMD分解效果很差,模態混疊現象比較嚴重,而對比圖3(b)可以發現,EEMD分解效果較好,圖3(b)中的IMF1、IMF3、IMF4分量分別與原仿真信號中的s1(t)、s3(t)、s2(t)相對應,曲線基本相符,說明在托輪位移仿真信號的分析中,EEMD方法比EMD方法更好。對比圖3(b)與圖3(c)可以發現,EEMD與CEEMD分解結果大致相當。對間歇信號的分離,CEEMD分解得到的IMF1分量和原始波形更加相符,而對s2(t)、s3(t)的分離效果用肉眼是很難比較的,為此,分別計算了IMF3、IMF4分量與原始信號的相關性,計算結果如表1所示。可見,CEEMD分解得到的有效特征分量的相關系數均大于EEMD分解的結果。
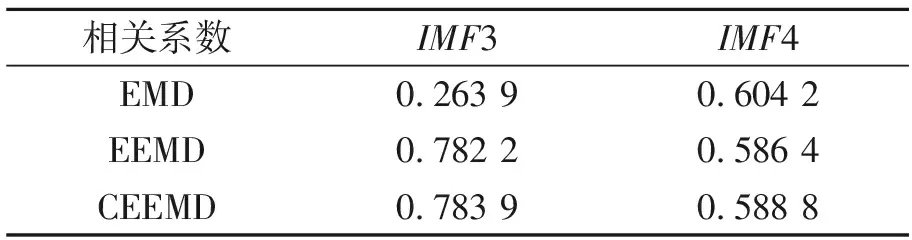
表1 相關系數對比結果
2.2 工程應用
為驗證上述方法是否可行,對國內某水泥廠現場數據進行采集和處理分析。采集的位移信號進行CEEMD分解,分解結果如圖4所示。

圖4 實際信號特征諧波提取結果
1、3檔托輪旋轉周期為5 s,圖4中KR特征諧波頻率為0.201 4 Hz,這與托輪工頻(0.02 Hz)相吻合;筒體旋轉周期為16 s,圖4中KS特征諧波頻率為0.061 04 Hz,這與筒體工頻(0.060 6 Hz)相一致,由于2檔處托輪直徑比1、3檔大,故其工頻較小,與圖4中2檔KR諧波頻率相吻合。這表明,托輪位移信號確實包含了筒體頻率成分和托輪頻率成分,驗證了前述理論的正確性。為方便分析,將圖4的分解結果整理成如圖5和圖6所示的KS幅值和KR幅值。由圖5可知,筒體偏心大小順序為2檔>1檔>3檔;由圖6可知,1檔左托輪受力明顯大于右托輪,2檔左右托輪受力相當,3檔右托輪受力大于左托輪。
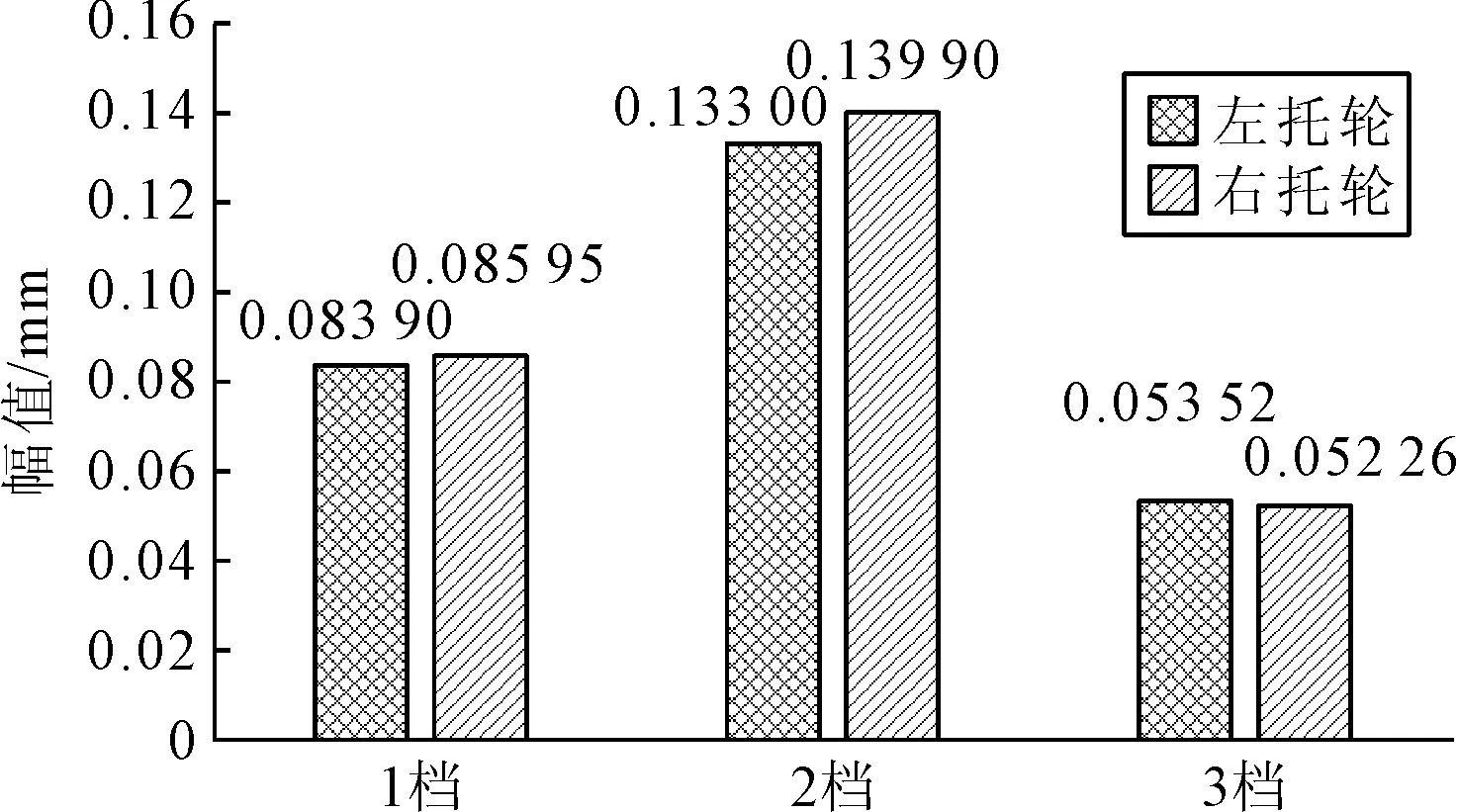
圖5 各托輪信號分解后KS幅值

圖6 各托輪信號分解后KR幅值
2.3 其他先進方法對比驗證
為驗證上一節實例分析結果的正確性,采用其他先進測量方法進行對比驗證。通過大激光采集筒體表面數據,對其截面進行擬合,得到筒體彎曲變形結果如圖7所示,偏心大小順序為:2檔>1檔>3檔,這與上一節KS幅值分析結果相吻合。通過回轉窯橢圓儀采集筒體橢圓度數據,測量結果如圖8所示,圖8中的兩個波谷的幅值比例可以反映左右托輪受力的相對大小,即比值L/R,這與上一節KR幅值分析結果相吻合。驗證了CEEMD方法提取特征諧波反映回轉窯故障類型的可行性及正確性。
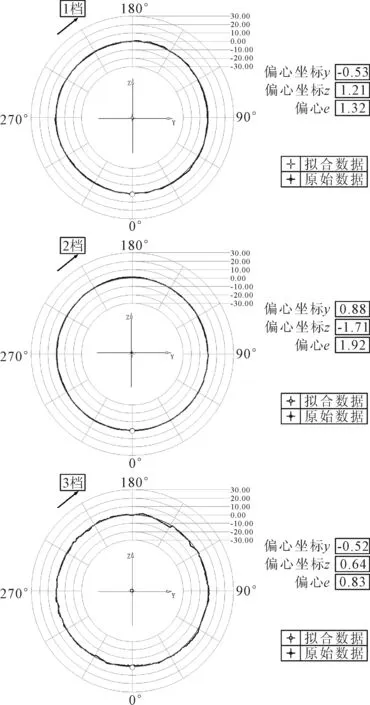
圖7 筒體彎曲變形測量結果
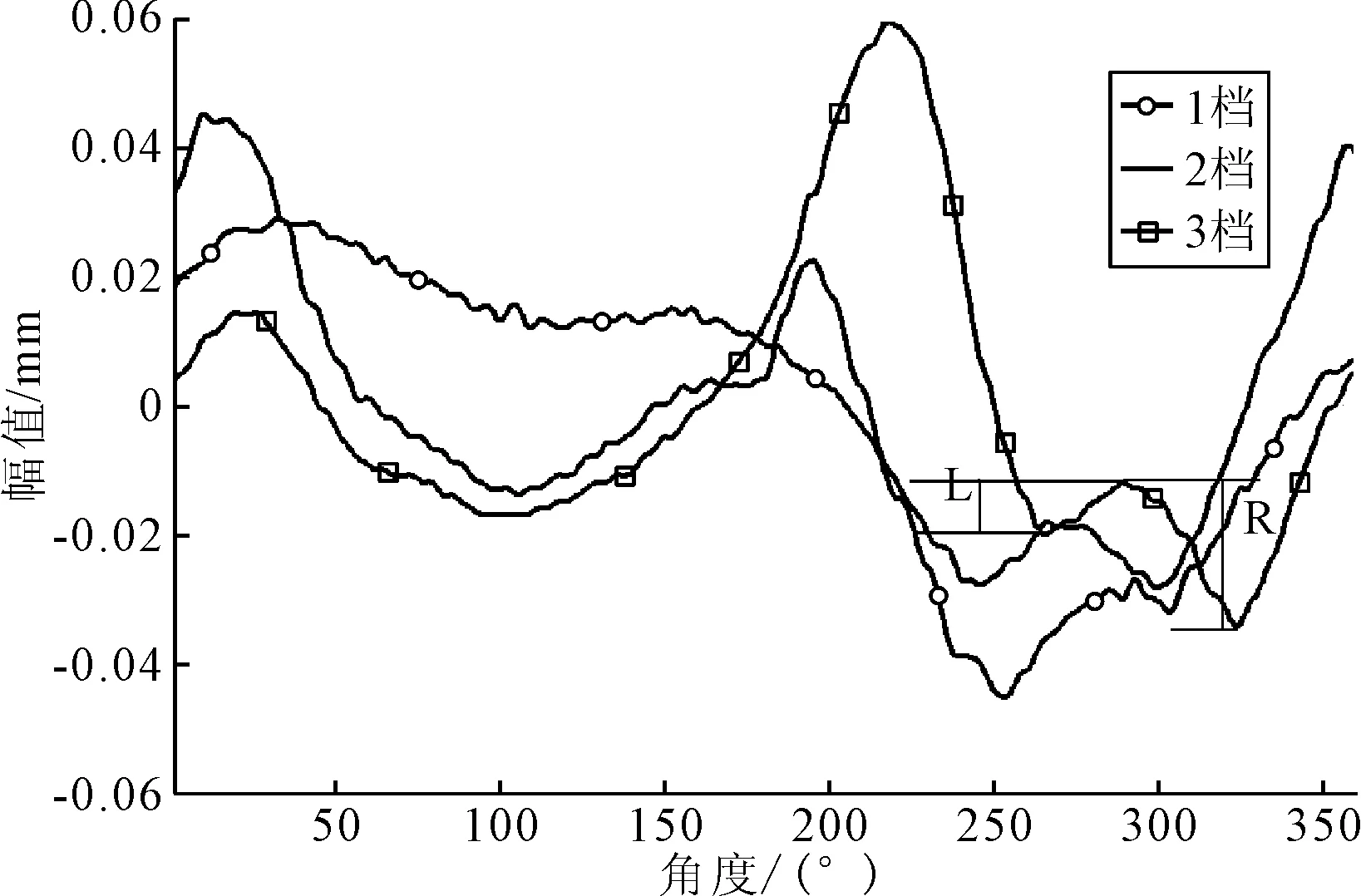
圖8 橢圓度測量結果
3 回轉窯托輪撓度監測系統
3.1 監測系統設計
基于前面的理論分析與實驗驗證,設計了回轉窯托輪撓度監測系統。該監測系統主要由負責數據采集的硬件層和負責數據分析處理的軟件層構成。在硬件層中,采用6路電渦流位移傳感器實時采集托輪的位移信號,通過NI-6225數據采集卡完成電信號的采樣,再將電信號傳送至PC上位機進行后續的數據分析處理[8]。硬件層整體架構如圖9所示。
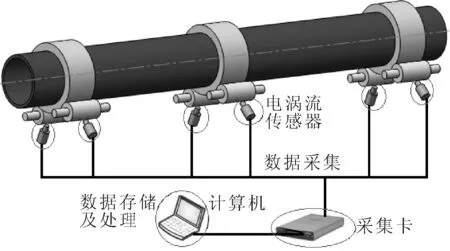
圖9 監測系統整體架構
由于本監測系統使用的是NI公司的數據采集卡,故在軟件層中選用NI公司的LabVIEW作為軟件開發平臺,便于數據采集功能的實現[9]。為實現監測系統整體功能,該系統需要包括托輪位移信號的采集、實時顯示、特征諧波提取、特征幅值趨勢顯示、數據庫存儲、歷史數據回看和故障預警等功能。為保證上述功能模塊協調穩定地運行,采用了多線程技術,主要包括人機用戶界面線程、數據采集線程、特征提取線程、數據顯示線程、數據庫存儲線程等。在數據采集線程中,為了不影響數據采集效率采用了基于隊列的生產消費者結構[10]。在特征提取線程中,采用CEEMD算法對托輪位移信號進行分解,提取出KS和KR諧波,然后通過傅里葉變換得到其幅值,再通過數據顯示線程將幅值變化趨勢反饋給用戶,從而可以知曉回轉窯的運行狀態。若想具體了解回轉窯的狀態變化過程,可以通過歷史數據回看功能查看其狀態的長期變化過程。充分發揮了LabVIEW平臺的多線程優勢,使各個模塊協調穩定地運行[11]。監測系統界面如圖10所示。

圖10 回轉窯監測系統界面
3.2 測試分析
為驗證該監測系統的穩定性和可靠性,將現場采集的托輪位移信號進行分析處理,得到不同故障模式下的信號。將這些不同故障模式下的托輪信號經過預處理來模擬回轉窯故障,在實驗室進行仿真測試,以此驗證該系統的性能。
(1)筒體彎曲變形故障。圖11顯示了回轉窯發生彎曲變形故障時,托輪位移信號經CEEMD方法進行特征諧波提取后KS、KR幅值的變化趨勢。從圖11中可以看出,KR幅值幾乎沒有任何變化,而KS幅值有明顯的增大趨勢,表明此刻發生筒體彎曲變形故障,與預期相符。
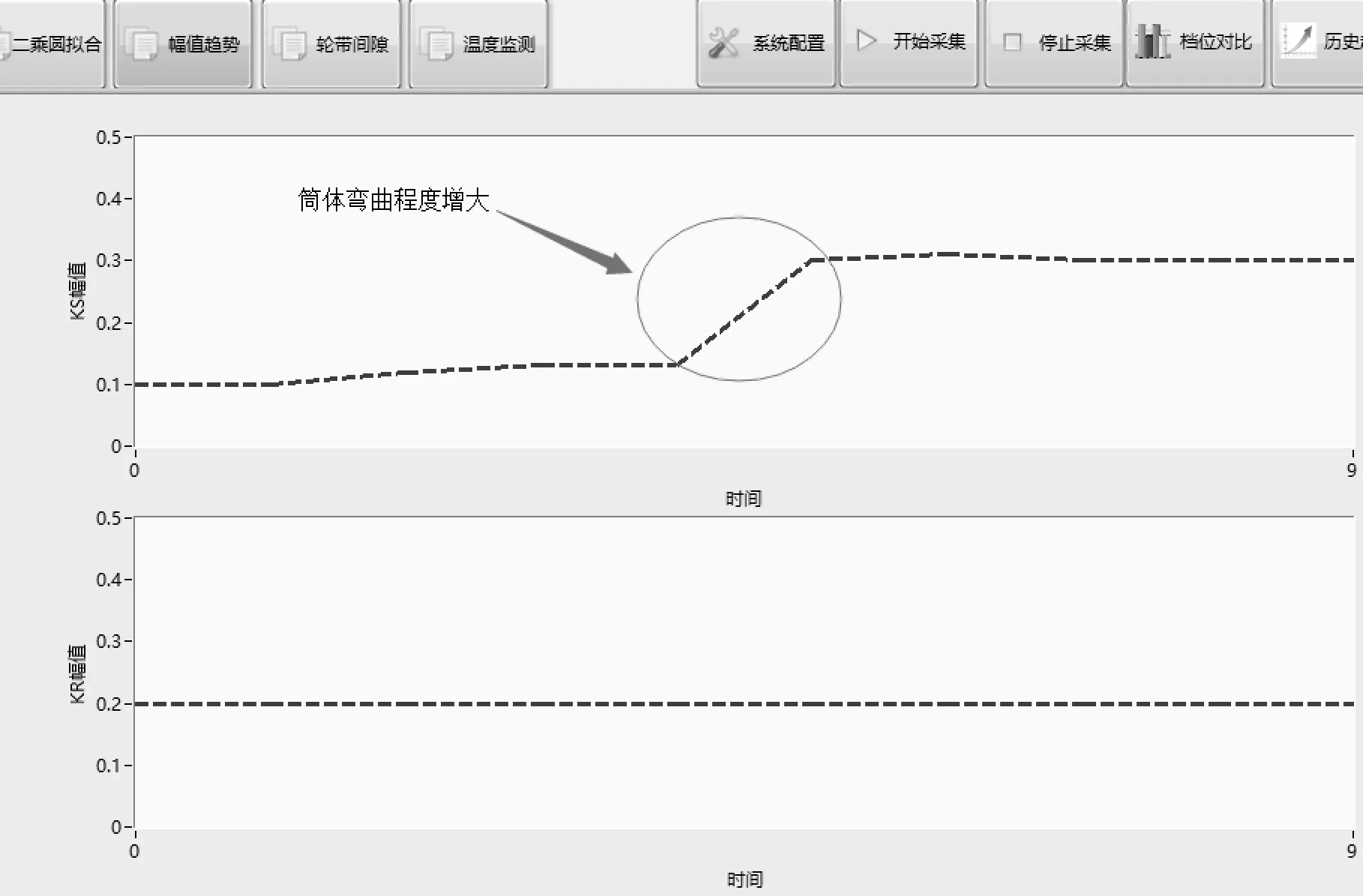
圖11 筒體彎曲故障時監測系統結果驗證
(2)托輪中心線偏移故障。圖12顯示了回轉窯發生中心線偏移時,托輪位移信號經CEEMD方法進行特征諧波提取后KS、KR幅值的變化趨勢。中心線偏移會造成托輪載荷分布不均,偏移一側的托輪承受的壓力會明顯增大。從圖12中可以看出,KS幅值基本不變,而KR幅值有增大趨勢,表明托輪所受載荷增大,與預期相符。

圖12 中心線偏移故障時監測系統結果驗證
4 結論
通過對托輪位移仿真信號和實際工程信號分析,CEEMD方法可以有效提取出特征諧波分量,提出了基于CEEMD的回轉窯故障識別方法,并與傳統測量方法進行對比,結果驗證了該方法的正確性。在此基礎上,設計了回轉窯狀態監測系統,測試結果表明了該監測系統的有效性和工程上的可行性,為回轉窯故障實時監測提供了一種新思路。
猜你喜歡
化工管理(2021年7期)2021-05-13 00:46:04
水泥技術(2021年2期)2021-04-20 12:37:26
鴨綠江(2021年35期)2021-04-19 12:24:18
農村實用技術(2021年1期)2021-02-27 08:26:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
汽車維修與保養(2015年6期)2015-04-17 03:31:50