基于CRLS的路面坡度及輪轂電機(jī)車輛質(zhì)量估計(jì)
2019-12-20 06:41:24劉會(huì)康
數(shù)字制造科學(xué) 2019年4期
付 翔,劉會(huì)康,黃 斌
(1.武漢理工大學(xué) 汽車零部件技術(shù)湖北省協(xié)同創(chuàng)新中心,湖北 武漢 430070;2.武漢理工大學(xué) 汽車工程學(xué)院,湖北 武漢 430070)
在車輛控制領(lǐng)域,整車質(zhì)量是一個(gè)基礎(chǔ)又關(guān)鍵的參數(shù),對(duì)于驅(qū)動(dòng)控制、能量管理控制和安全控制必不可少。如果直接使用整車整備質(zhì)量或滿載質(zhì)量作為控制參考量,將會(huì)影響驅(qū)動(dòng)控制精度或安全控制效果,因此結(jié)合現(xiàn)有的傳感測量技術(shù)和參數(shù)估計(jì)算法進(jìn)行整車質(zhì)量參數(shù)估計(jì)具有十分重要的研究意義和應(yīng)用價(jià)值[1]。結(jié)合輪轂電機(jī)電動(dòng)車輛結(jié)構(gòu)簡潔,效率高,可實(shí)現(xiàn)更加復(fù)雜的驅(qū)動(dòng)與制動(dòng)控制[2-4],并且實(shí)時(shí)轉(zhuǎn)矩和轉(zhuǎn)速可以準(zhǔn)確獲取的特點(diǎn),對(duì)整車質(zhì)量和路面坡度參數(shù)估計(jì)算法進(jìn)行設(shè)計(jì)。
車輛參數(shù)估計(jì)算法目前以最小二乘法、卡爾曼濾波、擴(kuò)展卡爾曼濾波、自適應(yīng)卡爾曼濾波等相類似的計(jì)算方法為主。此外滑模觀測器、模糊觀測器以及基于利亞普諾夫理論推導(dǎo)的非線性觀測器,神經(jīng)網(wǎng)絡(luò)算法也得到了一定的應(yīng)用[5]。在整車質(zhì)量與路面坡度參數(shù)估計(jì)方面,林楠等[6]以縱向加速度傳感器表達(dá)道路坡度變化率,建立車輛速度、加速度、路面坡度的狀態(tài)轉(zhuǎn)移關(guān)系,構(gòu)建了坡度估計(jì)卡爾曼濾波器,進(jìn)行路面坡度的估計(jì)。褚文博等[7]同時(shí)運(yùn)用動(dòng)力學(xué)模型和運(yùn)動(dòng)學(xué)模型,利用高頻信息提取加遞歸最小二乘法進(jìn)行質(zhì)量估計(jì),并利用估計(jì)參數(shù)進(jìn)行坡度的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)方法的融合觀測。雷雨龍等[8]以提高換擋品質(zhì)為研究目標(biāo),提出應(yīng)用擴(kuò)展卡爾曼濾波進(jìn)行車輛質(zhì)量和道路坡度的估計(jì),并進(jìn)行了實(shí)車道路試驗(yàn)數(shù)據(jù)的離線仿真驗(yàn)證其參數(shù)估計(jì)的有效性。胡丹[9]提出應(yīng)用雙擴(kuò)展卡爾曼濾波同時(shí)估算車輛狀態(tài)與附著系數(shù)的思想,使得兩部分估計(jì)器的信息相互交換,相互校正,實(shí)現(xiàn)了狀態(tài)參數(shù)的較高精度估計(jì)。
通過對(duì)以上整車質(zhì)量和道路坡度參數(shù)估計(jì)的文獻(xiàn)分析發(fā)現(xiàn),質(zhì)量和坡度參數(shù)估計(jì)算法的設(shè)計(jì)離不開整車縱向動(dòng)力學(xué)模型和運(yùn)動(dòng)學(xué)模型[10],結(jié)合可獲取的輸入變量,將動(dòng)力學(xué)模型或運(yùn)動(dòng)學(xué)模型與現(xiàn)有算法融合,便可實(shí)現(xiàn)一定精度的參數(shù)估計(jì),復(fù)雜的數(shù)學(xué)模型與多種算法的融合雖然可以提高參數(shù)估計(jì)精度,但參數(shù)估計(jì)的實(shí)時(shí)性和適應(yīng)性有待考量[11]。筆者在分析整車質(zhì)量和道路坡度兩參量估計(jì)的重要性和前人研究工作成果基礎(chǔ)上,對(duì)比了不同類型參數(shù)估計(jì)方法的利弊。提出以整車縱向動(dòng)力學(xué)公式為參數(shù)估計(jì)模型基礎(chǔ)公式,分析兩個(gè)待估計(jì)變量的特點(diǎn),將參數(shù)估計(jì)模型與遞推最小二乘法(recursive least square,RLS)結(jié)合,搭建出一個(gè)簡潔有效的參數(shù)估計(jì)算法,實(shí)現(xiàn)兩參數(shù)聯(lián)合估計(jì),在保持一定參數(shù)估計(jì)精度的前提條件下,提高模型運(yùn)行的高效性與實(shí)時(shí)性。
1 CRLS參數(shù)估計(jì)算法設(shè)計(jì)
1.1 輪轂電機(jī)車輛整車縱向動(dòng)力學(xué)模型的建立
輪轂電機(jī)4輪驅(qū)動(dòng)電動(dòng)汽車與傳統(tǒng)汽車相比,其取消了發(fā)動(dòng)機(jī),整車驅(qū)動(dòng)力由車輪處的輪轂電機(jī)提供;且未配備變速箱,只采用輪邊減速器,選定輪邊減速器速比i0=5,根據(jù)汽車旋轉(zhuǎn)質(zhì)量換算系數(shù)圖可知,選取旋轉(zhuǎn)質(zhì)量換算系數(shù)δ近似為1,因此本文取δ=1。根據(jù)輪轂電機(jī)驅(qū)動(dòng)車輛驅(qū)動(dòng)形式,結(jié)合傳統(tǒng)車輛縱向動(dòng)力學(xué)模型[12],得到如式(1)所示車輛的縱向動(dòng)力學(xué)模型:
式中:i0為輪邊減速器減速比;Ttq為4個(gè)輪轂電機(jī)驅(qū)動(dòng)轉(zhuǎn)矩之和;ηT為傳動(dòng)系統(tǒng)機(jī)械效率;r為車輪半徑;m為整車質(zhì)量;f為滾動(dòng)阻力系數(shù);G為整車重力;α為路面縱向坡度角;CD為空氣阻力系數(shù);A為迎風(fēng)面積;ua為車速;du/dt為縱向加速度。
1.2 整車質(zhì)量與路面坡度聯(lián)合估計(jì)算法設(shè)計(jì)
在參數(shù)實(shí)時(shí)估計(jì)與辨識(shí)領(lǐng)域,最小二乘法得到了廣泛應(yīng)用,RLS是最小二乘法的遞推形式,對(duì)于一個(gè)單輸入-單輸出系統(tǒng)(simple input simple output,SISO)來說,采用該算法不需要已知任何先驗(yàn)條件,并且計(jì)算量小,收斂速度快,可以實(shí)現(xiàn)參數(shù)辨識(shí)的快速收斂,滿足整車控制系統(tǒng)對(duì)實(shí)時(shí)性和精度的要求[13]。
遞推辨識(shí)算法的思想可以概括為:新的參數(shù)估計(jì)值=舊的參數(shù)估計(jì)值+修正項(xiàng),即新的遞推參數(shù)估計(jì)值是在舊的遞推估計(jì)值的基礎(chǔ)上而成。對(duì)于一個(gè)n階自回歸模型:
y(t)=a1y(t-1)+…+any(t-n)+ε(t)
(2)

其遞推最小二乘法參數(shù)估計(jì)表達(dá)式為:

(3)
(4)
(1-K(t+1)φT(t+1))P(t)/λ
(5)

整車質(zhì)量在行車開始之后是一個(gè)不變的量,而路面坡度是時(shí)變參量,因此本文采用一般RLS和指數(shù)加權(quán)RLS分別對(duì)整車質(zhì)量及路面坡度進(jìn)行在線辨識(shí)。在使用遞推最小二乘法進(jìn)行多參數(shù)辨識(shí)時(shí),不同的參數(shù)辨識(shí)順序會(huì)影響參數(shù)的辨識(shí)結(jié)果。在辨識(shí)順序的問題上,考慮到整車質(zhì)量是整備質(zhì)量與載荷相加得到,而起步時(shí)路面坡度卻沒有選取基準(zhǔn),因此將整車的整備質(zhì)量定義為整車質(zhì)量初值。筆者提出了一種基于整車質(zhì)量初值進(jìn)行路面坡度估計(jì),然后將路面坡度估計(jì)值返回質(zhì)量估計(jì)模塊,進(jìn)行整車質(zhì)量實(shí)時(shí)估計(jì)的CRLS(circle recursive least square)估計(jì)算法如圖1所示。
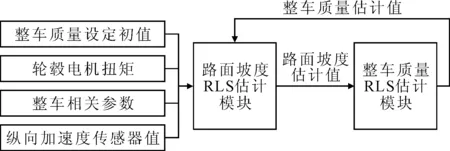
圖1 CRLS算法流程圖
對(duì)整車的縱向動(dòng)力學(xué)模型進(jìn)行以下變形:
(6)

其中θ為含有路面坡度變量的表達(dá)式。因此根據(jù)遞推最小二乘法參數(shù)估計(jì)公式可進(jìn)行路面坡度遞推算法設(shè)計(jì)。同時(shí),遺忘因子的選取范圍為(0,1],考慮到路面坡度的變化特性,舊的觀測數(shù)據(jù)對(duì)新的參量估計(jì)影響較小,因此選擇遺忘因子λ=0.9。
通過式(7)可求出相應(yīng)路面坡度估計(jì)值為:
(7)
得到坡度估計(jì)值后,將該坡度值作為質(zhì)量估計(jì)模塊輸入變量,進(jìn)行整車質(zhì)量估計(jì)。再次對(duì)整車縱向動(dòng)力學(xué)表達(dá)式進(jìn)行變形可得:
(8)

由以上變形公式和遞推最小乘法遞推公式可得整車質(zhì)量遞推算法。
2 聯(lián)合仿真與實(shí)車試驗(yàn)驗(yàn)證
2.1 聯(lián)合仿真試驗(yàn)
為了驗(yàn)證筆者提出的質(zhì)量及坡度估計(jì)算法的有效性,在Matlab/Simulink中建立輪轂電機(jī)模型,并與Carsim中已做修改的全尺寸SUV車型進(jìn)行連接,實(shí)現(xiàn)了4輪輪轂電機(jī)驅(qū)動(dòng)車輛模型的搭建。質(zhì)量和坡度估計(jì)模塊使用S_Function編寫程序,實(shí)現(xiàn)了CRLS算法迭代過程。在Simulink中搭建的聯(lián)合仿真模型如圖2所示。
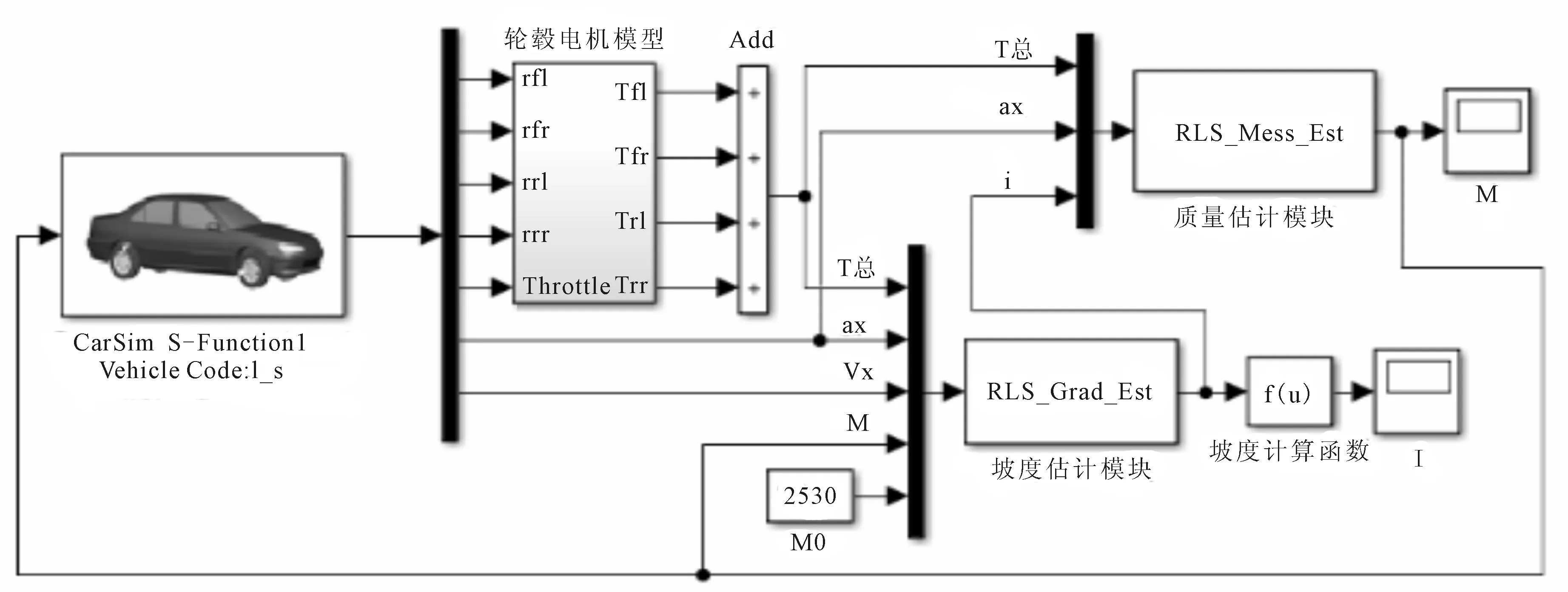
圖2 聯(lián)合仿真模型
在Carsim軟件中建立了道路坡度30%(坡道角為16.7°)和50%(坡道角為26.6°)的兩種坡道,并在對(duì)比仿真試驗(yàn)中改變了整車質(zhì)量。驗(yàn)證了筆者提出的質(zhì)量及坡度估計(jì)算法的有效性。道路坡道角16.7°、勻速30 km/h的仿真試驗(yàn)結(jié)果如圖3和圖4所示。

圖3 車速、縱向加速度、驅(qū)動(dòng)轉(zhuǎn)矩實(shí)時(shí)變化曲線圖
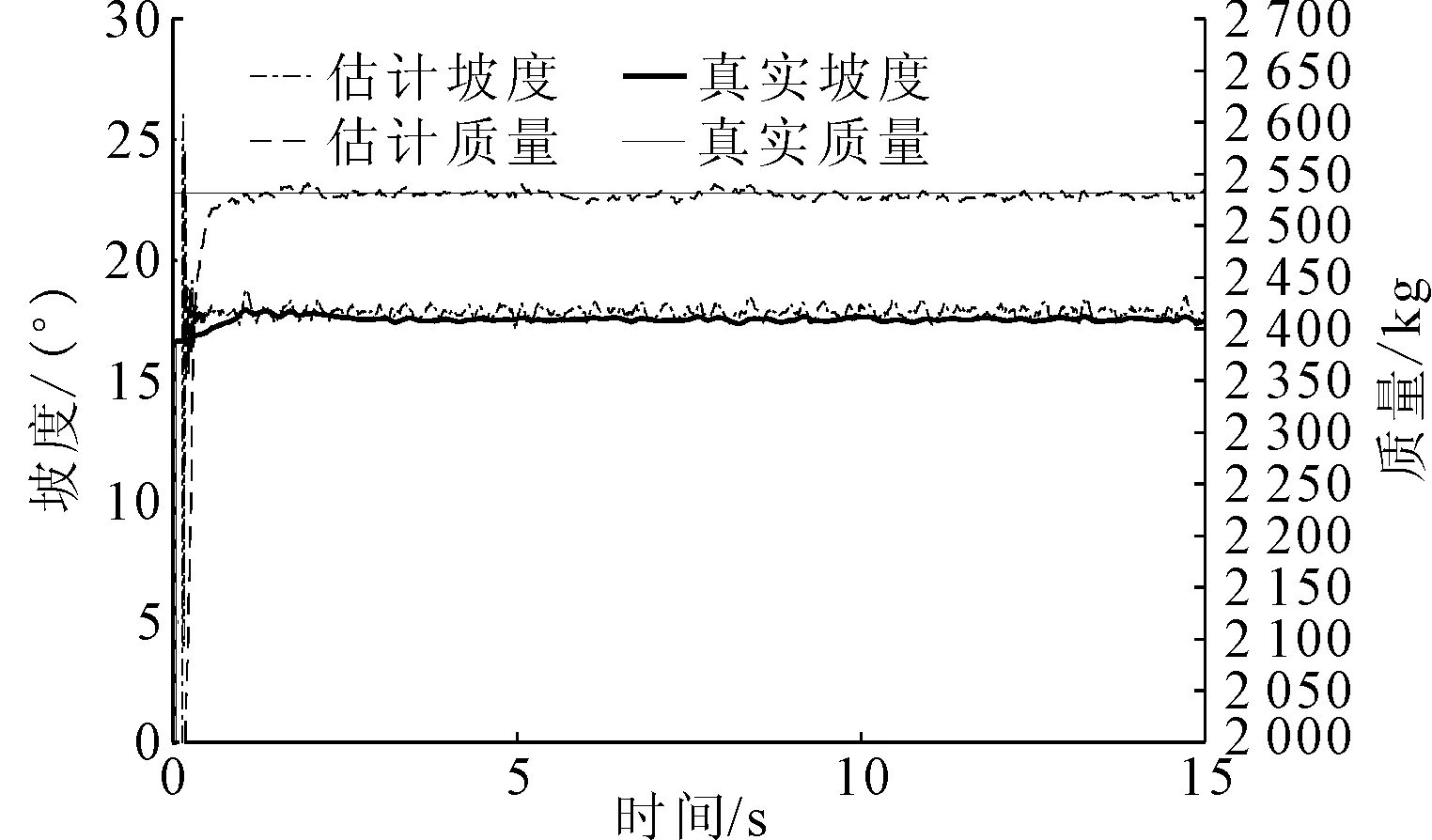
圖4 參數(shù)估計(jì)結(jié)果
道路坡道角26.6°、勻速30 km/h,并增加200 kg載重,其仿真試驗(yàn)結(jié)果如圖5和圖6所示。
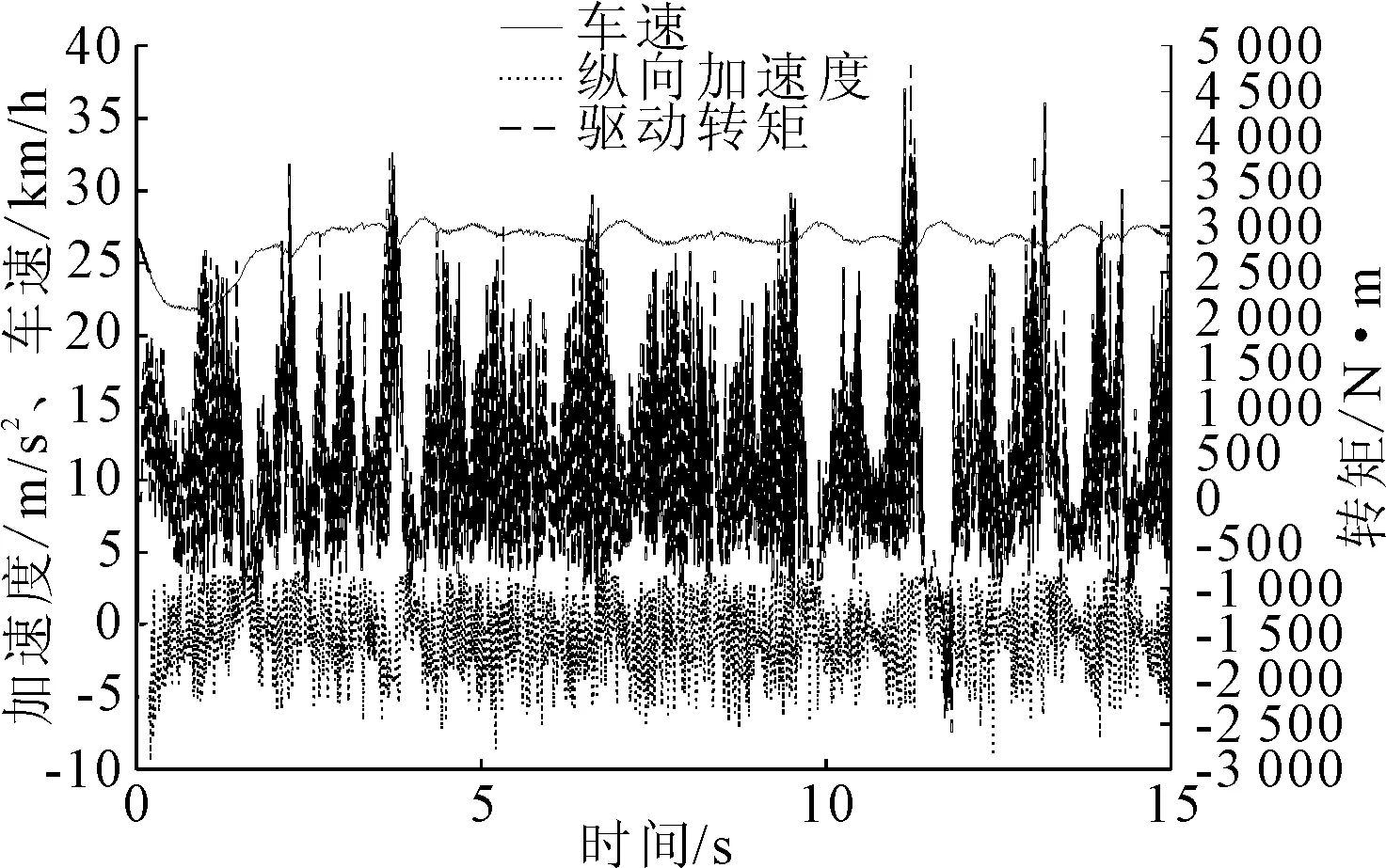
圖5 車速、縱向加速度、驅(qū)動(dòng)轉(zhuǎn)矩實(shí)時(shí)變化曲線圖
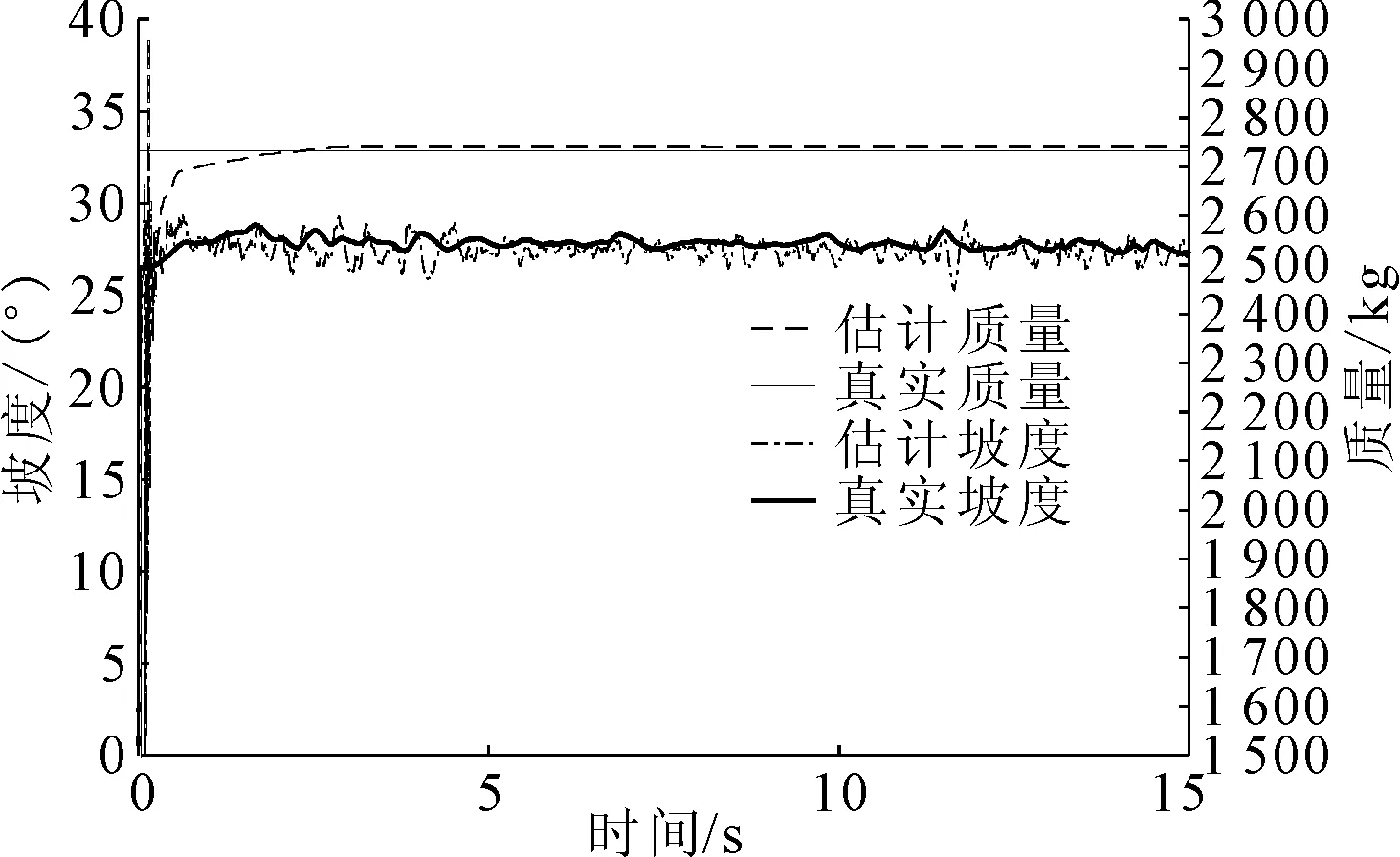
圖6 參數(shù)估計(jì)結(jié)果
筆者提出的CRLS估計(jì)算法可以實(shí)現(xiàn)對(duì)路面坡度和整車質(zhì)量實(shí)時(shí)估計(jì),整車總質(zhì)量設(shè)定值為2 530 kg、2 730 kg;路面坡度設(shè)定值為16.7°、26.6°。從聯(lián)合仿真結(jié)果可以看出:質(zhì)量估計(jì)值很快收斂到設(shè)定值附近;坡度估計(jì)值也很快收斂到設(shè)定值,且坡度估計(jì)誤差在2°以內(nèi),質(zhì)量估計(jì)誤差在10 kg以內(nèi),算法估計(jì)精度較高,收斂速度快且穩(wěn)定性較好。
2.2 實(shí)車試驗(yàn)
進(jìn)行實(shí)車道路試驗(yàn)是對(duì)所建立估計(jì)模型的更有意義的驗(yàn)證。以東風(fēng)汽車股份有限公司所開發(fā)的某款4輪輪轂電機(jī)驅(qū)動(dòng)越野車輛為試驗(yàn)平臺(tái),進(jìn)行整車質(zhì)量及道路坡度估計(jì)算法實(shí)車試驗(yàn)驗(yàn)證。在襄陽國家汽車質(zhì)量監(jiān)督檢驗(yàn)中心標(biāo)準(zhǔn)坡道試驗(yàn)場進(jìn)行50%(坡道角26.6°)坡度爬坡試驗(yàn)。整車相關(guān)參數(shù)、單個(gè)輪轂電機(jī)相關(guān)參數(shù)如表1和表2所示。
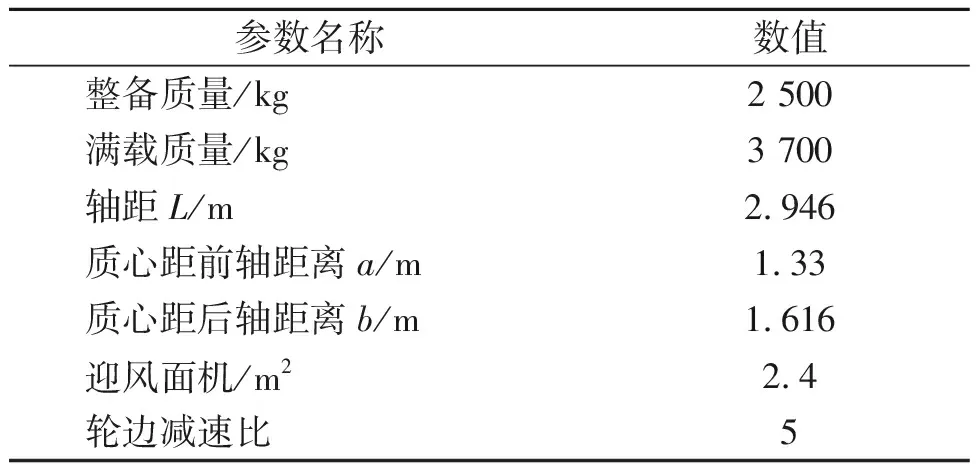
表1 整車參數(shù)表
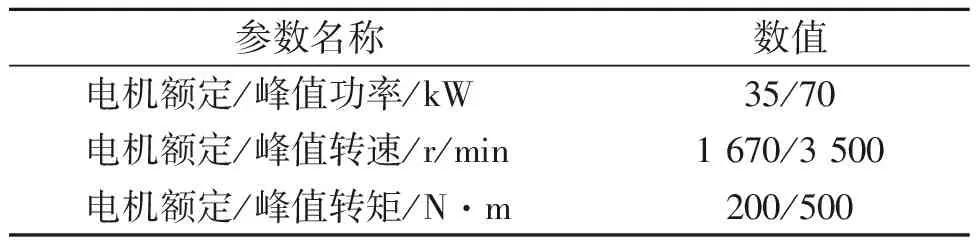
表2 單個(gè)輪轂電機(jī)參數(shù)表
在車輛質(zhì)心位置安裝縱向加速度計(jì),實(shí)時(shí)測量整車縱向加速度,作為參數(shù)估計(jì)輸入?yún)⒘浚瑫r(shí)將參數(shù)估計(jì)算法載入整車控制器中實(shí)時(shí)運(yùn)行。在26.6°標(biāo)準(zhǔn)坡道上進(jìn)行爬坡試驗(yàn)的結(jié)果如圖7和圖8所示。
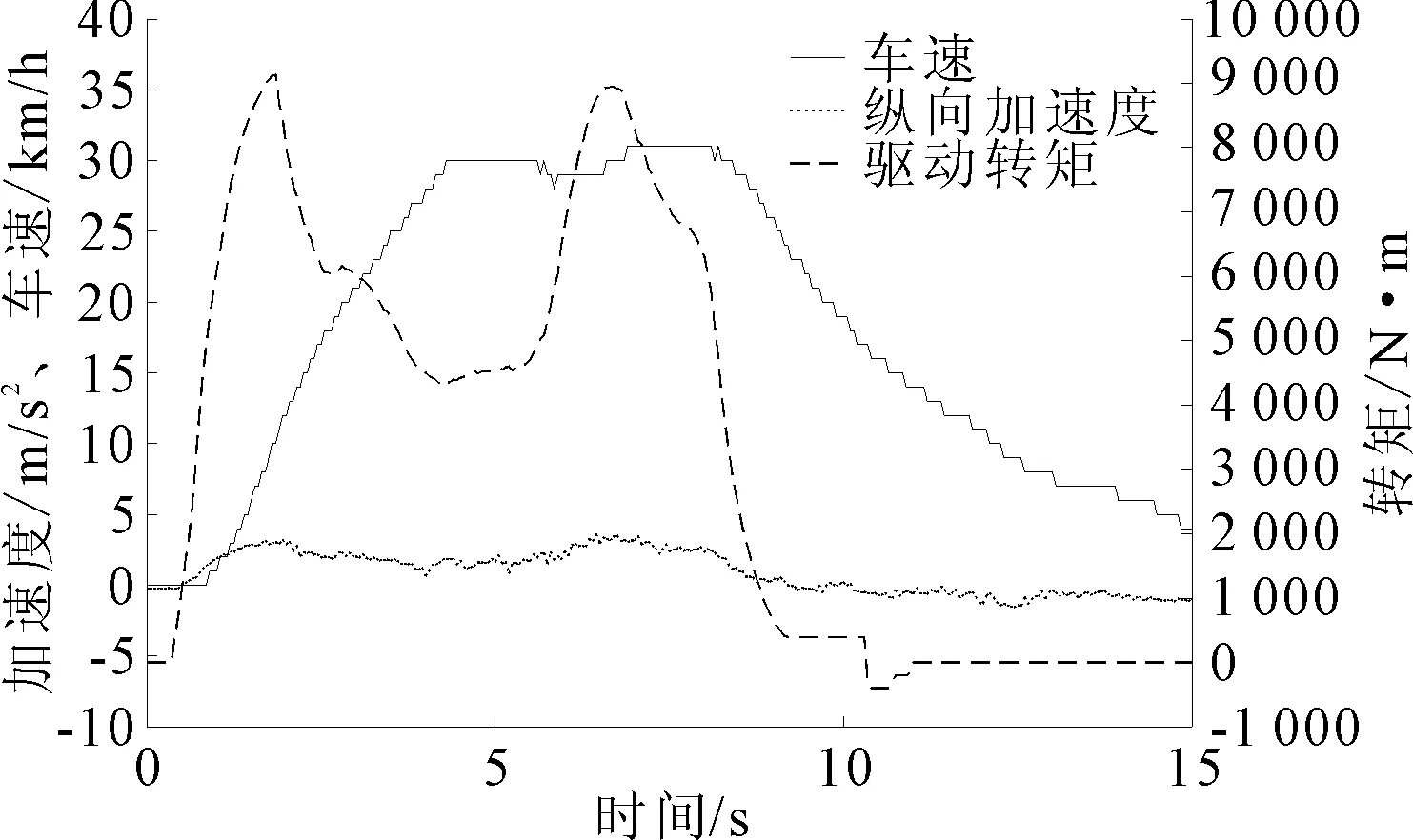
圖7 車速、縱向加速度、驅(qū)動(dòng)轉(zhuǎn)矩實(shí)時(shí)變化曲線圖
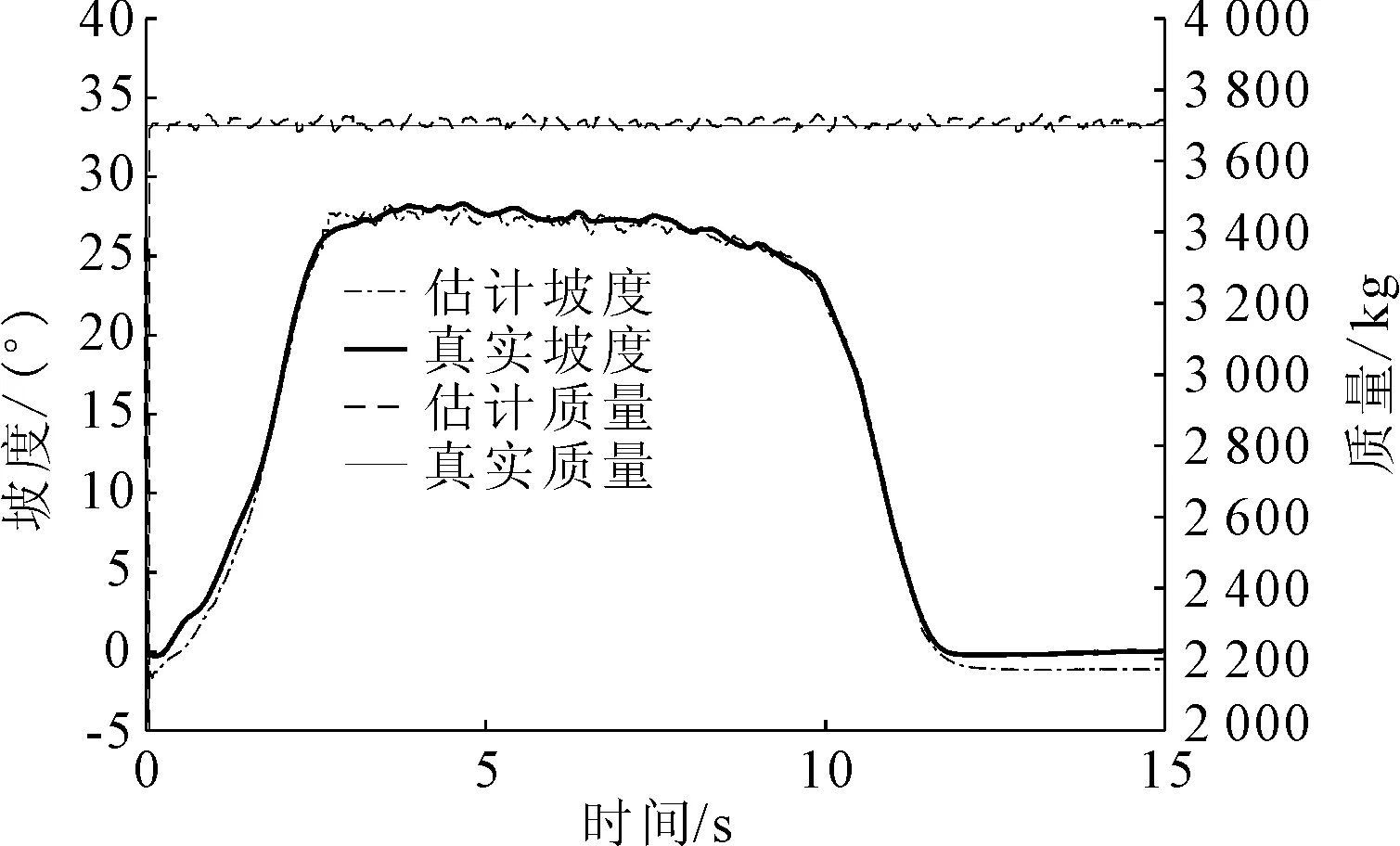
圖8 參數(shù)估計(jì)結(jié)果
圖7是在26.6°坡道上進(jìn)行實(shí)車驗(yàn)證時(shí),車輛的車速、縱向加速度和驅(qū)動(dòng)轉(zhuǎn)矩等狀態(tài)參數(shù)的實(shí)時(shí)變化曲線,圖8對(duì)比記錄了車輛的真實(shí)質(zhì)量和估計(jì)質(zhì)量,道路的真實(shí)坡度和估計(jì)坡度。通過對(duì)比分析可知,筆者提出的CRLS參數(shù)估計(jì)算法可以實(shí)現(xiàn)整車質(zhì)量±30 kg誤差的估計(jì)效果,在質(zhì)量估計(jì)結(jié)果的基礎(chǔ)上,所得出的路面坡度估計(jì)精度誤差在2°以內(nèi),并且坡度估計(jì)值可以快速跟蹤路面真實(shí)坡度變化趨勢。
參數(shù)估計(jì)算法在實(shí)車上的道路驗(yàn)證試驗(yàn)、與之前的聯(lián)合仿真結(jié)果對(duì)比可知,在實(shí)車上應(yīng)用該參數(shù)估計(jì)算法進(jìn)行參數(shù)在線實(shí)時(shí)估計(jì)時(shí),整車質(zhì)量的估計(jì)精度有所降低,并出現(xiàn)小幅度波動(dòng),但并未影響到路面坡度的實(shí)時(shí)估計(jì)效果,坡度估計(jì)較好地跟隨真實(shí)路面坡度變化,并且估計(jì)精度與聯(lián)合仿真估計(jì)精度一致。
3 結(jié)論
(1)以某型4輪輪轂驅(qū)動(dòng)電動(dòng)車輛為研究對(duì)象,利用輪轂電機(jī)車輛驅(qū)動(dòng)轉(zhuǎn)矩和轉(zhuǎn)速易于獲取,基于輪轂電機(jī)電動(dòng)車輛縱向動(dòng)力學(xué)模型,提出一種循環(huán)遞推最小二乘估計(jì)算法。將待估參量與其他參量解耦,依次建立路面坡度與整車質(zhì)量的RLS估計(jì)模型,在已知整車質(zhì)量初值的前提下,進(jìn)行路面坡度動(dòng)態(tài)估計(jì);進(jìn)一步將估計(jì)的路面坡度作為質(zhì)量估計(jì)模型的輸入量,得到準(zhǔn)確的整車質(zhì)量估計(jì)值,并且將此質(zhì)量估計(jì)值作為路面坡度估計(jì)模型的整車質(zhì)量輸入量,形成了CRLS估計(jì)模型。
(2)Carsim與Matlab/Simulink聯(lián)合仿真結(jié)果顯示,質(zhì)量和坡度估計(jì)結(jié)果可以很快收斂于設(shè)定值。同時(shí)在實(shí)車試驗(yàn)驗(yàn)證環(huán)節(jié),通過算法估計(jì)結(jié)果與車載傾角傳感器采集數(shù)據(jù)實(shí)時(shí)對(duì)比,發(fā)現(xiàn)坡度估計(jì)值能很好地跟隨實(shí)際坡度的變化,質(zhì)量估計(jì)值迅速收斂于真實(shí)值,驗(yàn)證了筆者提出的包含質(zhì)量估計(jì)最小二乘法與含遺忘因子的坡度估計(jì)最小二乘法聯(lián)合CRLS算法的有效性與穩(wěn)定性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2021年12期)2021-12-31 03:23:08
中學(xué)生數(shù)理化·中考版(2020年10期)2020-11-27 01:59:48
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年2期)2019-08-23 08:12:08
產(chǎn)品可靠性報(bào)告(2017年7期)2017-09-05 09:49:12
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
汽車觀察(2016年3期)2016-02-28 13:16:26
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03