面向操縱優化的智能列車輔助駕駛系統
2019-12-02 04:58:50高士根董海榮朱海楠
鐵道學報 2019年11期
高士根, 董海榮, 朱海楠
(北京交通大學 軌道交通控制與安全國家重點實驗室, 北京 100044)
目前,在列車駕駛及運行過程中,列車駕駛員從列車運行控制系統人機交互界面中獲取的信息主要集中于列車速度信息(如當前速度、線路限速)以及站停信(下一站距離)等關鍵防護性信息,而對于其他重要信息如外部運行環境信息、前后列車信息等掌握不足,這既不利于列車駕駛員做出及時合理的操縱應對,亦不利于其執行優化的操縱行為。如何針對人工駕駛列車運行的特點,在保障安全的前提下通過一定的技術手段提高人工駕駛的操縱決策水平,對于實現列車節能準點運行及提升干線鐵路運輸效率具有重要的現實意義。
此前國際上對于列車輔助駕駛系統DAS(Driver Advisory System)及其功能擴展已經展開了很多探討與研究,如德國的TAS系統、瑞典的CATO系統、德國的LEADER系統等,分別以不同的方式與形式進行了面向節能、準點的列車輔助駕駛系統的開發,并進行了部分的線上應用測試,取得了可觀的效果[1-2]。而我國在這方面的研究相比起步較晚,且多集中于列車運行曲線的優化理論與控制方法等方面,對于人工列車駕駛環境下的列車運行優化的實現則考慮較少。如文獻[3-4]根據我國的具體國情和路情對列車輔助駕駛系統進行了研究,并基于半實物仿真驗證了所提出的系統與方法在應對典型運行場景時的作用。文獻[5]針對列車節能操縱優化研究的基本問題,基于求解方法的特征對已研究的方法進行分類,將其分為解析方法、數值方法和仿真方法3大類。文獻[6]對列車駕駛輔助系統的關鍵功能進行了技術對比,并進行了初步的系統設計;文獻[7]依據列車牽引計算建立列車運行模型,將列車節能優化操縱問題轉化為 最優控制問題進行求解,并設計貨運列車運行仿真軟件進行仿真驗證;文獻[8]以列車動力學模型為基礎,建立了列車運行節能操縱方案的數學模型,并結合改進的遺傳算法對列車節能操縱問題進行求解。
綜上,輔助駕駛系統在提高駕駛員操縱列車水平 方面具備重要的意義,也已得到了較多研究人員的關注,但現有的輔助駕駛系統多采用離線優化加車載提示的方式,即采用離線優化完畢后的相關信息由車載端進行存儲和調用提示,較少考慮在線優化的過程,使得系統的智能性、適用性與靈活性均受到一定的限制,當列車運行出現偏差或出現突發情況時亦缺乏足夠的應對能力。本文將在文獻[9-10]的基礎上,以優化駕駛員操縱為目標,給出一種結合離線與在線的駕駛策略優化方法并基于半實物仿真平臺進行驗證,為智能列車輔助駕駛系統功能的充分發揮提供方法支撐。
1 智能列車輔助駕駛系統
智能列車輔助駕駛系統iDAS(Intelligent Driver Advisory System)是利用列車定位、測速等傳感器信息,結合現代計算機技術與通信技術,實現列車運行環境信息通報、駕駛操縱方案優化與提示、潛在危險預警與應對、后備模式輔助運行等功能的輔助系統。其可在列控系統通過其主人機交互界面DMI(Driver Machine Interface)向列車駕駛員所提供的防護性信息的基礎上,輔助列車駕駛員進行安全、節能、準點等的列車駕駛操縱,并可在列控系統發生故障時作為后備系統,輔助列車駕駛員進行安全目視行車,防止列車事故。
與列車輔助駕駛系統相比, iDAS與其的主要區別在于:首先不同于列車輔助駕駛系統多采用的僅有靜態線路數據庫,iDAS車載端集成列車狀態信息采集功能,可實現列車狀態信息的感知,為后臺動態優化提供依據;其次依據車載端傳輸的列車狀態,中心端可采用智能優化方法對列車運行曲線和操縱序列進行動態優化并將優化后的結果傳送至車載端DMI,形成動態反饋機制以應對多變的運行環境,為列車駕駛員提供實用的操縱參考建議。
綜合國內外現有的理論結果與工程實踐,對智能列車輔助駕駛系統所需要考慮的主要信息進行分析與總結為:
(1) 列車運行環境信息提示:如前行和后續列車的相對位置、可能影響列車運行約束的天氣信息等。
(2) 列車優化操縱相關信息:如面向節能和準點的優化操縱方案(運行曲線)提示、關鍵區段(如動能闖坡、電分相區域)等的提示等。
(3) 列車運行狀態信息:列車當前位置、下一停站 距離、終點站距離、列車當前運行時分、下一停站時間預估、運行早晚點情況等運行時分信息。
上述3項關鍵功能所需的數據可來源于智能列車輔助駕駛系統自身具備的自主定位模塊以及車-地、車-車之間的通信,無需與現有的列車運行控制系統進行直接交互,避免了引入智能輔助駕駛系統可能對現有列車運行控制系統的安全性所產生的影響。可選用智能手機、平板電腦等設備作為車載端設備,避免接口適配和設備改造等可能帶來的較高成本。
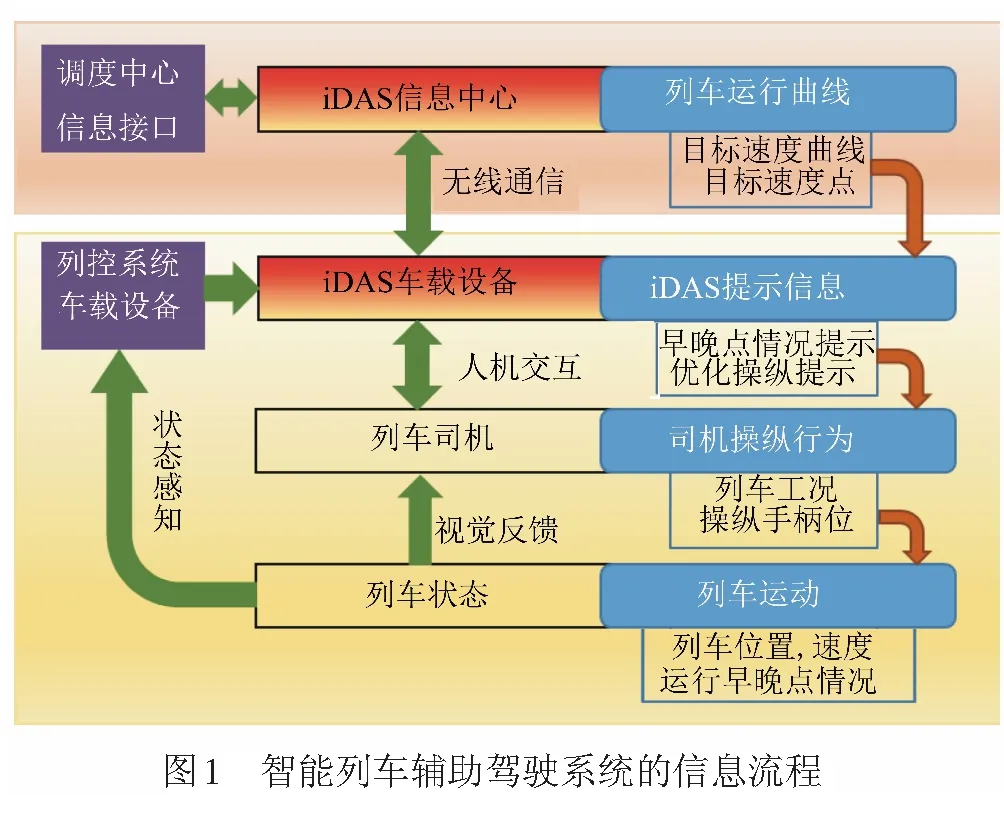
本文所設計的系統采用iDAS信息中心加iDAS車載設備兩個層級的方式進行實現。其中,iDAS車載設備向列車駕駛員提供人機交互接口并從已有列控系統車載設備獲取列車運行狀態信息,之后將所獲取的信息反饋至iDAS信息中心;iDAS信息中心負責根據iDAS車載設備反饋回的信息進行相應的列車目標運行曲線優化及其對應優化操縱序列的計算,再將所計算結果發送給iDAS車載設備進行提示與決策支持,同時需與現有調度中心進行調度命令、監控信息、列車運行狀態等信息交換。兩層級間由無線數據通信進行雙向信息通信連接。本文所設計與使用的智能列車輔助駕駛系統的信息流程見圖1。
2 人工駕駛條件下的列車駕駛策略優化
2.1 假設條件
針對人工駕駛所具有的獨特特點,本文在進行列車運行曲線優化的計算過程中做以下假設:
(1) 根據文獻[11]所得出的結論,列車在同一限速和坡度的子區間內運行時,其最優工況序列為最大牽引-巡航-惰行-最大制動的子序列。而在人工駕駛條件下,巡航(恒速)模式較難維持,因而本文采用“最大加速-惰行-最大制動”的子序列作為子區間內最優工況序列,即除需采取制動段的子區間外,其他子區間內采用牽引加惰行組合的方式進行操縱。
(2) 人工駕駛列車時,為保證運行平穩性和乘客舒適性,要求列車駕駛員在改變檔位時遵循“緩提少切”的原則,即切換檔位時要逐級切換,同時在整個運行過程中盡可能少地進行檔位切換。
2.2 列車駕駛策略優化問題的數學模型
基于運動學定律受力分析的列車單質點動力學 模型為
( 1 )
式中:v為列車速度;s為列車運行里程(以運行起點為零點的相對距離);t為時間;Mt為列車的總質量;kt、kb分別為牽引和制動的標志位系數;F(cf,v)和B(cb,v)分別表示列車當前輸出的牽引力與制動力,為與列車當前速度v及駕駛員控制器檔位cf、cb相關的二元函數;G(s)為與運行里程相關的坡道所造成的作用力,表示為
G=Mt·G(s)=
( 2 )
其中,Lc為列車總計算長度,gi為列車當前所處子區間的坡度,li為列車處于當前子區間內的長度,n為計算點總個數;R(v)為列車所受基本阻力,由戴維斯方程進行計算為
R(v)=Mt·(av2+bv+c)
( 3 )
其中,a、b、c分別為滾動阻力、摩擦阻力、列車阻力系數。
列車運行優化目標函數由下式構建
( 4 )
式中:ε為功率傳輸系數;F(cf,v)為列車當前輸出的牽引力;φ為列車自用電折算功率;ti為列車從第i個計算點到第i+1個計算點的運行時間;Tp為站間計劃運行時間;w1、w2為權值系數。可見人工駕駛下的列車運行曲線優化目標函數由列車運行總能耗和列車站間運行時間偏差兩部分組成。
目標函數所受到的約束條件為
v(0)=v(Tp)=0
( 5 )
cmin≤ci≤cmax
( 6 )
( 7 )
式中:cmin、cmax分別對應最大常用制動檔位和最大牽引檔位;Sp為站間運行距離。式( 5 )、式( 7 )對應列車的站間運行的空間約束,式( 6 )對應司控器最大檔位約束。
上述式( 1 )~式( 7 )用于描述列車站間運行時其駕駛策略的優化問題,考慮列車自用電對總計算能耗的影響,并建立操縱檔位與列車運行速度曲線之間的計算關系,可提高所采用數學模型對實際列車運行描述的準確性與模型的實用性。
2.3 結合離線與在線方法的求解算法
依據前述假設條件,列車的操縱過程可抽象為由一個離散操縱序列所決定的連續變化過程,即決策變量
( 8 )
式中:N為所劃分的子區間數目;dN為第N個子區間內的牽引距離;cN為第N個子區間內所采取的牽引檔位。決策變量與優化問題的數學模型之間的關系表達為
( 9 )
式中:si為列車在當前子區間內所運行的距離;V為線路限速。即若運行距離si尚未達到預設牽引距離di,則以牽引檔位cn進行牽引(kt=1,kb=0);若si已達到預設牽引距離di,則后續段由惰行工況補足(kt=0,kb=0);若在運行過程中有運行速度vi超出V的情況,則按照相應規程進行制動操作(kt=0,kb=1)。

算法對應的主要步驟如下:
Step1
FORi=1:n
IFgi≠gi-1ORV-≠V+
THEN從點i起劃分為新的子區間;
END
END
Step2
FORi=1:n
END
END
FORi=n:1
END
END
之后在VminT約束下設置并執行遺傳算法流程,得到離線優化后的駕駛策略次優解及所對應的站間運行時間偏差Terr。
Step3
定義評價指標函數為
(10)
式中:d為該子區間內的原牽引距離;δd為迭代過程中選取的牽引距離變化量;Δs為距離計算間隔;m為子區間內計算點的總數量。子區間內牽引距離的分配路徑由各子區間的該指標決定,具體反映為區間內單位運行時間變化量下的能耗變化量。
并建立各子區間內的評價指標δ(n);設定在線計算步長、站間運行時間誤差容忍度Ttol及最大計算次數Nmax。
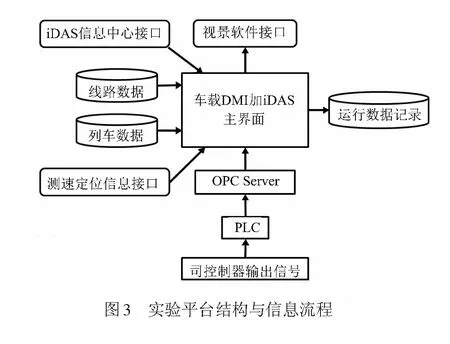
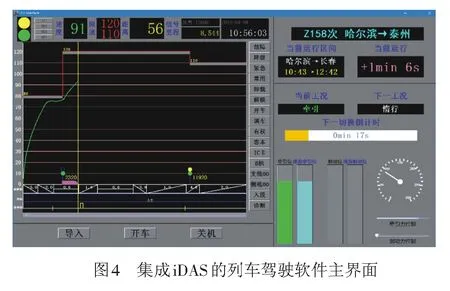
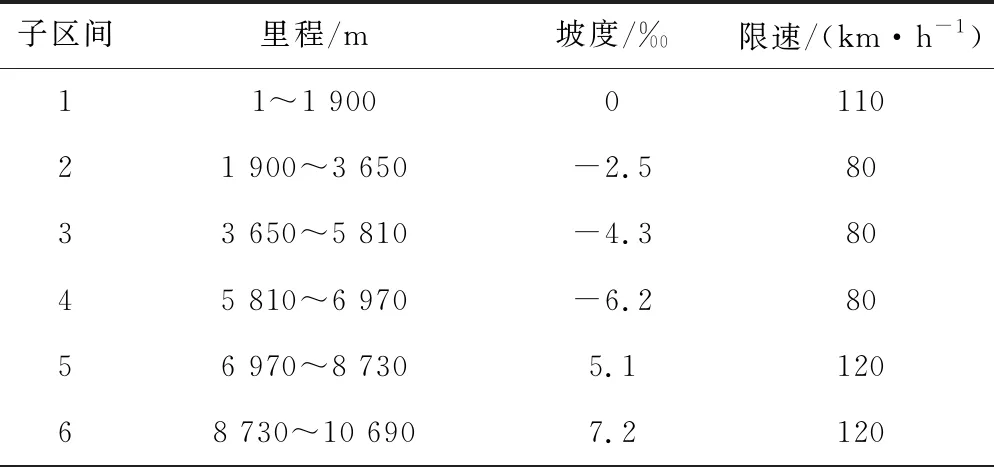
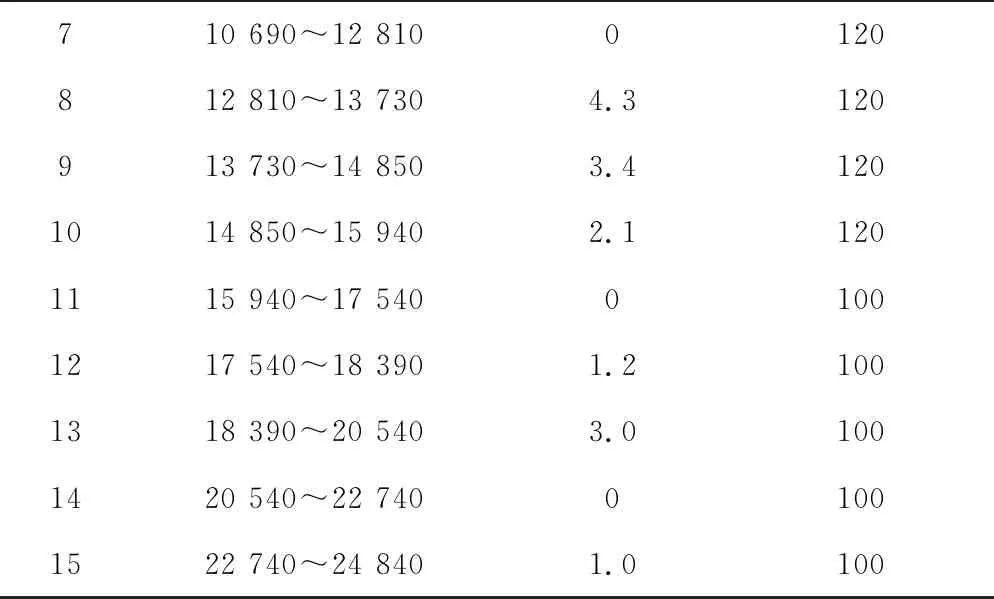
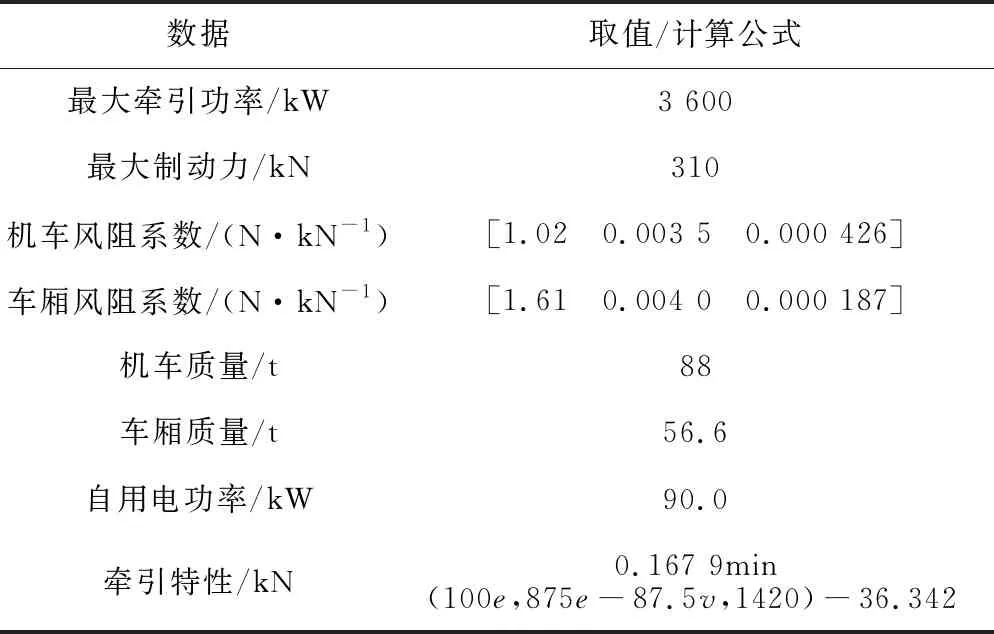
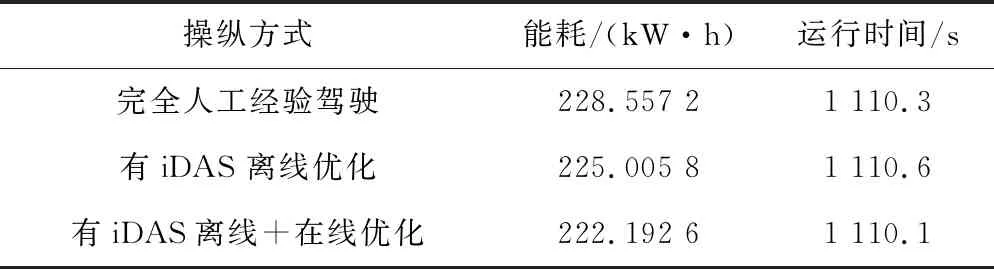
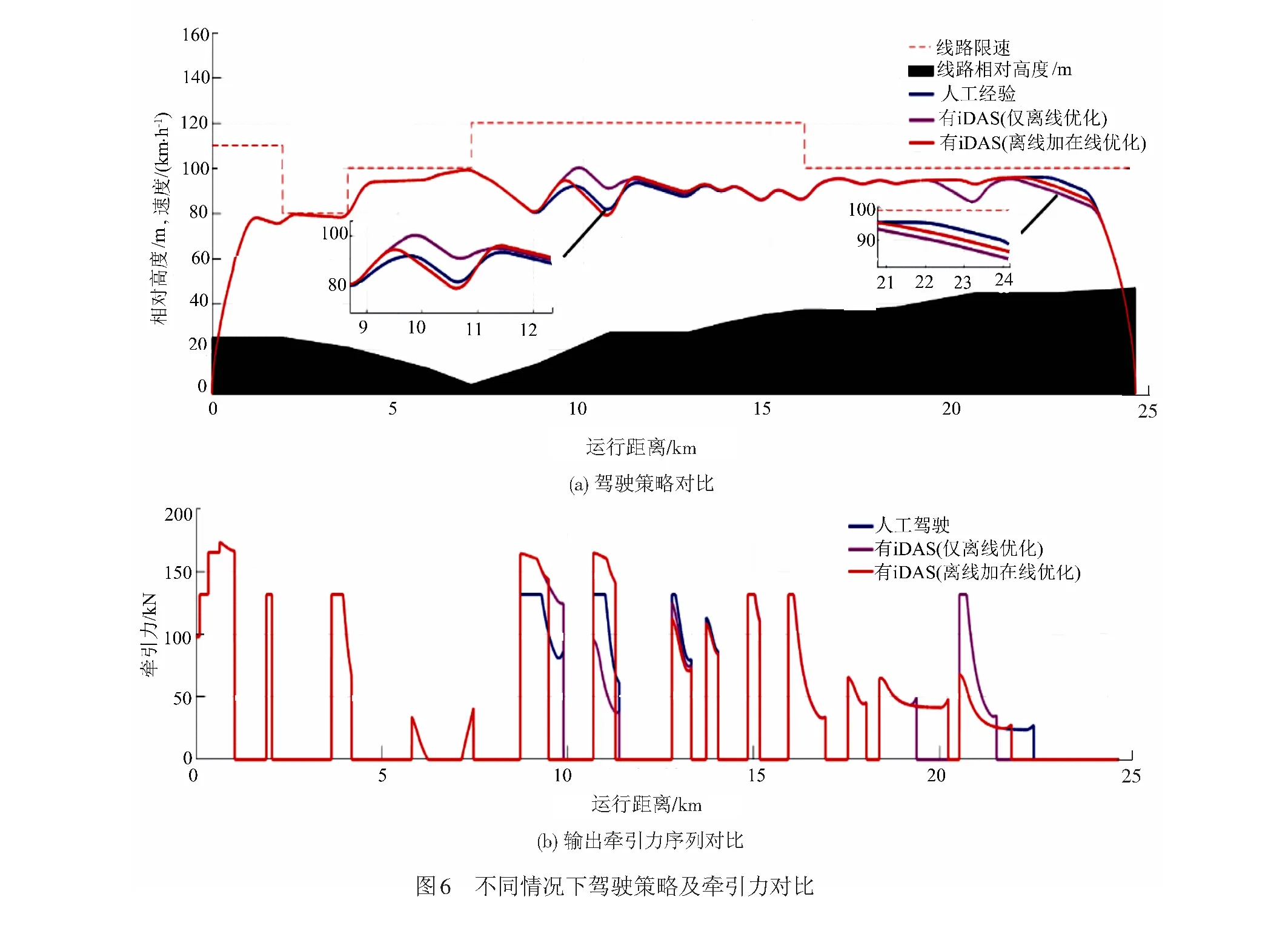
WHILE |Terr|>TtolOR當前計算次數 IF當前策略站間運行時間>預設站間運行時間 THEN調整具有最大評價指標的子區間內牽引距離由dn變為dn+δd,更新駕駛策略的總能耗及Terr; ELSE調整具有最大評價指標的子區間內牽引距離由dn變為dn-δd,更新駕駛策略的總能耗及Terr; END END 算法的流程圖見圖2。 為對智能列車輔助駕駛系統的功能進行測試,采用實物列車司機控制器加軟件功能及界面方式開發了集成系統的半實物綜合實驗平臺,平臺主體功能組成與信息流程見圖3。 列車駕駛過程由圖4所示的PC軟件界面及圖5所示S640U型實物司機控制器共同進行模擬。圖4中左側為依據標準LKJ2000系統主界面所開發的軟件界面,右側為iDAS相關提示信息區域,包含車次號、始發終到車站、當前運行區間、當前運行時分早晚點情況、當前工況、下一工況以及切換倒計時、推薦操縱檔位等信息。平臺軟件整體采用Java編程語言開發,具有良好的可移植性,同時為基于Android操作系統的移動端APP開發提供了便利,方便后續以智能平板電腦或手機作為車載端的iDAS系統的現場測試。 本文選用某型電力機車為例,在線路縱斷面數據基礎上,研究所提出的系統結構與方法的有效性。列車采用1機車加9車廂編組,車廂乘客定員按平均110人計算。實驗中所用線路數據與車輛數據分別見表1、表2。 表1 實驗案例中使用的線路數據 710 690~12 8100120812 810~13 7304.3120913 730~14 8503.41201014 850~15 9402.11201115 940~17 54001001217 540~18 3901.21001318 390~20 5403.01001420 540~22 74001001522 740~24 8401.0100 表2 實驗案例中使用的車輛數據 注:牽引特性部分為基于列車牽引計算規程的計算公式,其中e為帶邊手柄位置,v為車速。機車風阻系數和車廂風阻系數3組取值分別對應式( 3 )中的a,b和c。 選取完全人工經驗駕駛、有iDAS(僅離線優化)及有iDAS(離線加在線優化)3種典型情況分別進行若干次駕駛實驗,所得到的仿真結果見圖6。對仿真結果進行分析如下: (1) 純人工駕駛情形下,駕駛員對上坡道的處理不足(6 970~8 730、8 730~10 609 m兩個連續上坡子區間內采用的牽引距離過短或牽引檔位較低),導致列車在上坡道子區間中的速度下降較為明顯,并導致在后續駕駛過程中,駕駛員在列車進站前本應執行惰行或制動的子區間(22 740~24 840 m)內采取了額外的牽引工況以補償運行時間偏差,造成了總運行能耗的增加。此情況下列車站間運行總能耗為228.56 kw·h,運行時間為1 110.3 s。 (2) 對于有iDAS(僅離線優化)情況,由于在上坡道子區間內(8 730~10 690 m)給出了較高的牽引檔位及牽引距離提示,使得列車平均運行速度得以提升,在進站前的子區間內得以提前采用惰行工況,降低了 整體的站間運行能量消耗。由于離線算法本身屬隨機 搜索類算法,其存在的容易局部收斂等局限性導致所 得到的實際是次優解,反映在駕駛策略的調整上則相對較為激進(子區間20 540~22 740 m處出現了提前惰行加額外牽引的情況)。此情況下列車站間運行總能耗為225.01 kW時,運行時間為1 110.6 s,相比情況(1)的節能百分比為1.55%。 (3) 對于有iDAS(離線加在線優化)情況,在情況(2)離線優化結果的基礎上,將列車運行狀態考慮在內對各子區間內的牽引距離進行進一步調整,使得列車在保證運行時間不變的前提下進一步降低運行能耗。此情況下列車站間運行總能耗為222.20 kW·h,運行時間為1 110.1 s,相比于情況(2)的節能百分比為1.24%,相比情況(1)節能百分比為2.78%。 3組仿真實驗的數據對比見表3。運行時間相差較小,均在可接受的偏差范圍內(<1 s),證明了所提出的方法與系統在輔助列車駕駛員進行節能、準點的駕駛操縱方面的作用。 表3 實驗案例的能耗運行時間結果對比 本文針對智能列車輔助駕駛系統展開研究,在分析列車人工駕駛操縱過程的基礎上,設計了智能列車輔助駕駛系統的整體架構,基于區間內牽引距離與檔位建立了人工操縱下的列車運行優化問題數學模型,并采用離線與在線相結合的算法對其進行求解,最后基于半實物仿真平臺進行實驗與案例分析,證明了智能列車輔助駕駛系統能夠輔助列車駕駛員進行更好的節能準點駕駛。下一步工作將從半實物仿真平臺的進一步改進、算法效率的提升及原型系統的研發及現場測試等方面展開,以期為智能列車輔助駕駛系統的現場測試和實際運用提供必要的準備。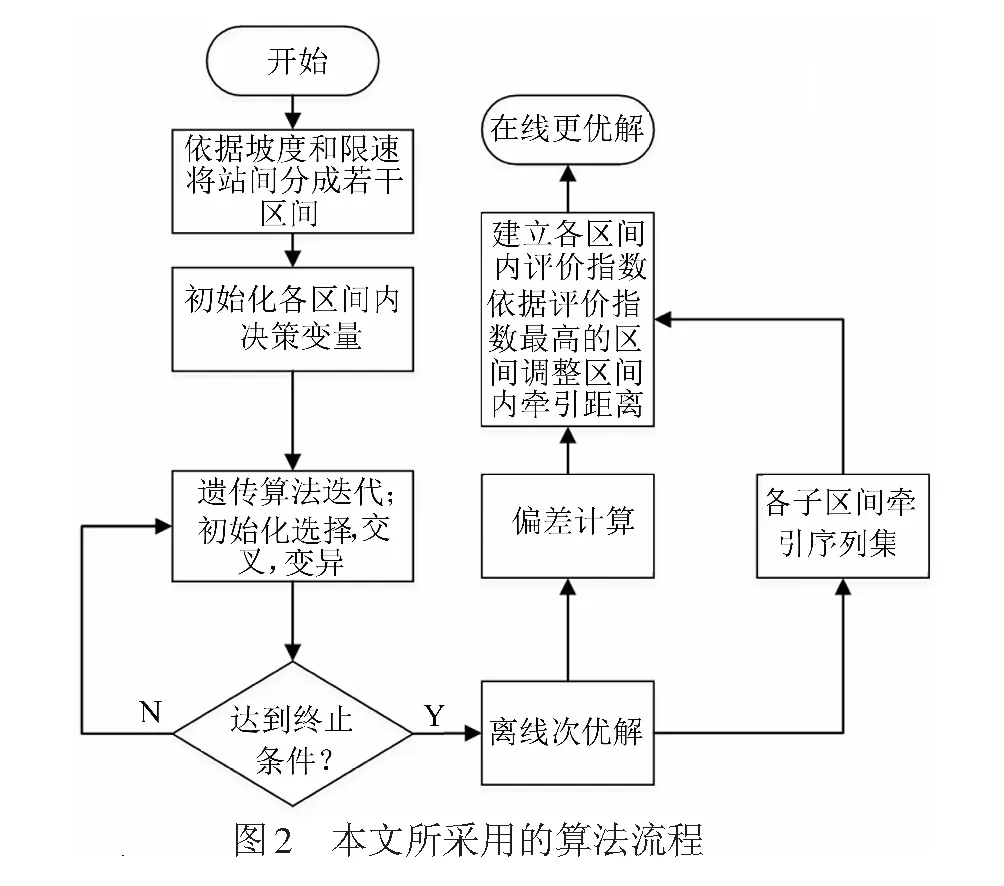
3 仿真與實驗分析
3.1 半實物仿真平臺的搭建

3.2 實驗數據與參數
3.3 實驗案例與結果分析
4 結束語
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
