基于RRT 路徑規(guī)劃算法的改進(jìn)方法研究*
2019-11-29 06:56:16何佳夏海鵬劉修知
汽車實(shí)用技術(shù) 2019年22期
何佳,夏海鵬,劉修知
(中國汽車技術(shù)研究中心有限公司,天津 300300)
前言
隨著無人駕駛技術(shù)的發(fā)展,無人車的路徑規(guī)劃技術(shù)作為其中的重要技術(shù)獲得了迅速的發(fā)展[1]。其中傳統(tǒng)的路徑規(guī)劃算法包括人工勢場法、模糊規(guī)則法、遺傳算法、神經(jīng)網(wǎng)絡(luò)、模擬退火算法、蟻群優(yōu)化等算法[2]。但這些方法都需要在一個(gè)確定的空間內(nèi)對障礙物進(jìn)行建模,計(jì)算復(fù)雜度與機(jī)器人自由度呈指數(shù)關(guān)系,不適合解決多自由度機(jī)器人在復(fù)雜環(huán)境中的規(guī)劃問題。
本文主要研究RRT 算法及其改進(jìn)方法,快速擴(kuò)展隨機(jī)樹(RRT/rapi-dly exploring random tree)算法在1998 年由LaValle 教授提出[3],通過環(huán)境空間的隨機(jī)采樣點(diǎn),把搜索導(dǎo)向空白區(qū)域,從而尋找到一條從起始點(diǎn)到目標(biāo)點(diǎn)的規(guī)劃路徑。通過對環(huán)境空間中的采樣點(diǎn)進(jìn)行碰撞檢測,避免了對環(huán)境空間的建模,能夠有效地解決高維空間和復(fù)雜約束的路徑規(guī)劃問題,適合解決多自由度機(jī)器人在復(fù)雜環(huán)境下和動(dòng)態(tài)環(huán)境中的路徑規(guī)劃[4]。RRT 算法存在節(jié)點(diǎn)擴(kuò)展時(shí)缺乏引導(dǎo)信息,存在較大的盲目性,導(dǎo)致生成的路徑曲折不連續(xù),且容易陷入局部極小值等不足。關(guān)于RRT 算法的改進(jìn)提出了很多解決方法,大致可以分為兩大類,一類是基于基本RRT 算法節(jié)點(diǎn)選擇、步長選擇、擴(kuò)展方向等的改進(jìn),另一類與其他路徑規(guī)劃算法融合的改進(jìn)。
1 基本RRT 算法
RRT 算法以一個(gè)初始點(diǎn)作為根節(jié)點(diǎn),通過隨機(jī)采樣增加葉子節(jié)點(diǎn)的方式,生成一個(gè)隨機(jī)擴(kuò)展樹,當(dāng)隨機(jī)樹中的葉子節(jié)點(diǎn)包含了目標(biāo)點(diǎn)或進(jìn)入了目標(biāo)區(qū)域,便可以在隨機(jī)樹中找到一條從初始點(diǎn)到目標(biāo)點(diǎn)的路徑。基本RRT 算法流程圖如圖1 所示。
(1)初始化樹空間
初始化隨機(jī)樹,輸入初始節(jié)點(diǎn)qstart和目標(biāo)節(jié)點(diǎn)qgoal,對初始節(jié)點(diǎn)與目標(biāo)節(jié)點(diǎn)進(jìn)行連接嘗試,如果初始節(jié)點(diǎn)與目標(biāo)節(jié)點(diǎn)能夠連接成功,則返回成功生成的路徑。
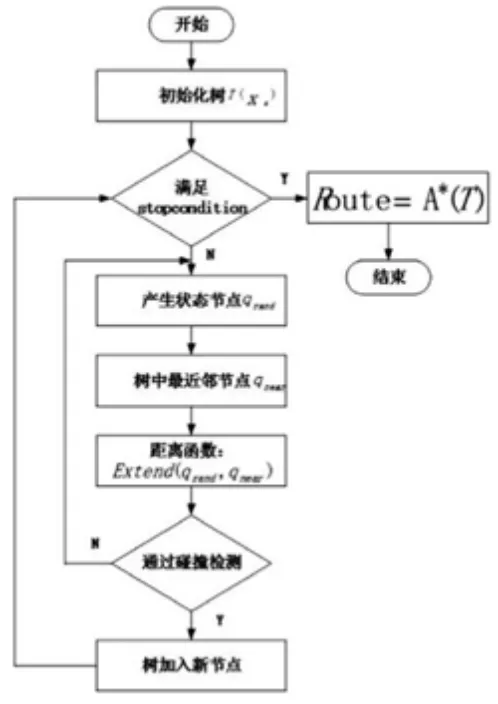
圖1 基本RRT 算法流程圖
(2)構(gòu)造搜索樹空間
在環(huán)境空間中隨機(jī)生成一隨機(jī)節(jié)點(diǎn)qrand,在qrand附近找到距離其最近的qnear,生成沿qnear和qrand方向上,距qnear為Δq的qnew,對qnear到qnew做碰撞檢測,如果沒有碰撞,則將qnew和其與qnear連接的邊添加到搜索樹空間,如此循環(huán),直至遍歷整個(gè)環(huán)境空間。
(3)生成路徑
如果qnew與qgoal重合或者qnew和qnear將qgoal包圍,則已到達(dá)終點(diǎn),在搜索樹空間中將從起點(diǎn)到終點(diǎn)生成的邊連接起來,即為生成的路徑。
2 基于基本RRT 算法改進(jìn)
2.1 偏向目標(biāo)的RRT 算法
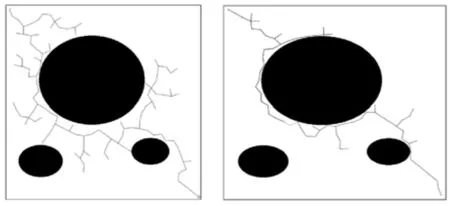
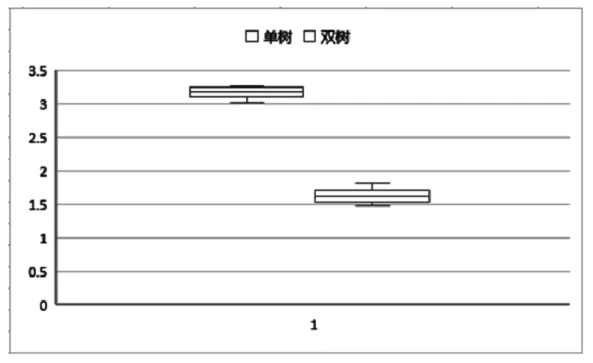
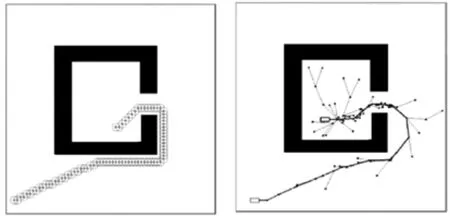
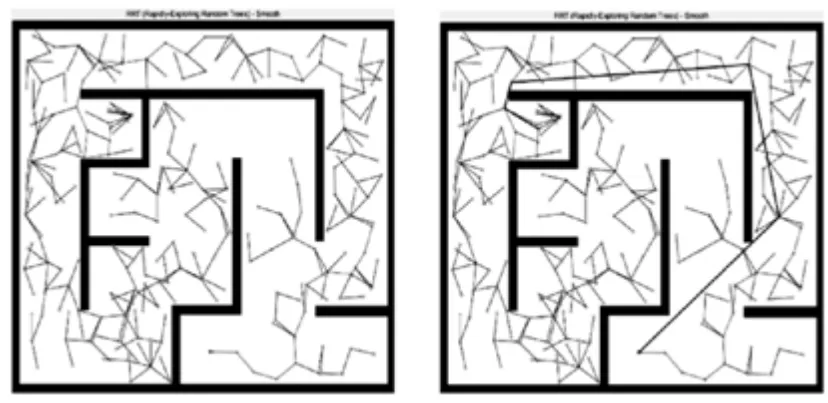
為了加快隨機(jī)樹到達(dá)目標(biāo)點(diǎn)的速度,在隨機(jī)樹每次的生長過程中,根據(jù)隨機(jī)概率來決定qrand是隨機(jī)點(diǎn)還是目標(biāo)點(diǎn),使樹的擴(kuò)展有一個(gè)偏向目標(biāo)節(jié)點(diǎn)的趨勢[5]。具體思想為:在選擇隨機(jī)點(diǎn)時(shí),設(shè)置參考值ref(在0 到1 之間),每次得到一個(gè)0 到1 的隨機(jī)值p,當(dāng)0 圖2 偏向目標(biāo)的RRT 算法 雙向RRT 算法,顧名思義是在原來單向RRT 算法基礎(chǔ)上又多擴(kuò)展了一個(gè)從目標(biāo)節(jié)點(diǎn)擴(kuò)展的隨機(jī)樹[6]。具體思想為:首先同時(shí)從初始節(jié)點(diǎn)qstart和目標(biāo)節(jié)點(diǎn)qgoal分別生成兩顆隨機(jī)樹,在狀態(tài)空間中均勻的隨機(jī)選取一個(gè)狀態(tài)節(jié)點(diǎn)qrand,尋找離狀態(tài)節(jié)點(diǎn)最近的節(jié)點(diǎn)進(jìn)行擴(kuò)展,通過碰撞檢測嘗試尋找新的節(jié)點(diǎn)qnew加入到第一棵樹中,然后使第二顆樹朝向第一棵樹所生成的新節(jié)點(diǎn)qnew進(jìn)行多步擴(kuò)展,試圖將第二顆樹連接上第一棵樹,如果連接成功,從已經(jīng)連接上的兩棵樹中返回一條連接起始點(diǎn)和目標(biāo)點(diǎn)的路徑。算法仿真如圖3 所示,其中上圖為單樹生成路徑,下圖為雙樹生成路徑,藍(lán)色路徑為第一棵樹生成路徑,紅色路徑為第二顆樹生成路徑。且分別采集100 次仿真時(shí)間對比如圖4,雙樹比單樹仿真時(shí)間平均快一倍。 圖3 雙向RRT 算法 由于擴(kuò)展點(diǎn)的隨機(jī)選取,規(guī)劃出來的隨機(jī)路徑具有很大的隨機(jī)性。動(dòng)態(tài)步長的RRT 算法是在對基本RRT 算法的基礎(chǔ)上,添加動(dòng)態(tài)步長的改進(jìn),改善了RRT 算法生成路徑的不確定性,提高了RRT 算法的避障等能力。具體思想為:基本的RRT 算法新節(jié)點(diǎn)位置的計(jì)算公式如(1)所示。 其中,ρ為RRT 生長的最小單位長度,成為步長。 加入目標(biāo)引力思想的RRT 算法新節(jié)點(diǎn)位置的計(jì)算公式如(2)所示。 其中,ρ1為隨機(jī)點(diǎn)方向上的步長,ρ2為目標(biāo)點(diǎn)方向上的步長。 在目標(biāo)引力思想RRT 算法的基礎(chǔ)上添加了動(dòng)態(tài)步長的概念。當(dāng)沒有遇到障礙物時(shí)取ρ2>ρ1,使隨機(jī)擴(kuò)展樹朝著目標(biāo)節(jié)點(diǎn)方向生長;當(dāng)遇到障礙物時(shí)取ρ2<ρ1,使隨機(jī)擴(kuò)展樹朝著隨機(jī)點(diǎn)方向生長。算法仿真如下圖4 所示,其中上圖為基本RRT 算法生成的路徑,下圖為動(dòng)態(tài)步長RRT 算法生成的路徑。 圖4 單樹、雙樹仿真時(shí)間對比 圖5 動(dòng)態(tài)步長RRT 算法 參數(shù)化RRT 算法在環(huán)境空間中隨機(jī)采樣,缺乏引導(dǎo)信息,導(dǎo)致規(guī)劃出的路徑長度、時(shí)間都有很大的隨機(jī)性。而結(jié)合A*算法的最優(yōu)型、完備性和RRT 算法的快速性、便于考慮運(yùn)動(dòng)學(xué)約束的特性可以解決此問題。具體思想為:首先,對環(huán)境空間進(jìn)行低分辨率的柵格化處理,然后利用A*算法在低分辨率的柵格地圖上進(jìn)行路徑規(guī)劃,實(shí)時(shí)地規(guī)劃出一條最短路徑,然后根據(jù)A*算法規(guī)劃的結(jié)果生成引導(dǎo)域[7]。在RRT采樣的過程中,結(jié)合A*算法,加入引導(dǎo)域偏向采樣策略,在隨機(jī)樹構(gòu)建過程中,只在引導(dǎo)域中生成路徑,既可以偏向目標(biāo)節(jié)點(diǎn)生成,又可以生成最優(yōu)路徑。算法仿真如上圖5 所示,其中上圖為基于A*算法生成的引導(dǎo)域,下圖為在引導(dǎo)域內(nèi)生成的路徑。 圖6 融合A*算法引導(dǎo)域的RRT 算法 由于基本RRT 算法的隨機(jī)性導(dǎo)致生成的路徑不平滑,無法被車輛等實(shí)際應(yīng)用,因此融合曲線平滑連接進(jìn)行改進(jìn)[8],具體思想為:首先采用基于最大曲率約束的剪枝函數(shù)對整棵樹進(jìn)行處理,刪去不必要的節(jié)點(diǎn),添加必要的節(jié)點(diǎn),接著使用B 樣條曲線、回旋曲線、貝賽爾曲線等曲線對RRT 算法生成路徑進(jìn)行平滑連接,既保證曲率連續(xù)的同時(shí)又能滿足車輛等的非完整約束。算法仿真如圖7 所示,其中上圖紅色連線為基本RRT 算法生成路徑,圖7 黑色連線為曲線優(yōu)化后的的路徑。 圖7 平滑連接后的RRT 生成路徑 RRT算法雖然具有快速性、便于考慮運(yùn)動(dòng)學(xué)約束等優(yōu)勢,但是構(gòu)建擴(kuò)展樹的隨機(jī)性、容易陷入局部極小值等方面還有待改進(jìn),總的來說改進(jìn)方法分為兩大類,一類是基于基本RRT算法節(jié)點(diǎn)選擇、步長選擇、擴(kuò)展方向等的改進(jìn),二是與其它路徑規(guī)劃算法融合的改進(jìn)。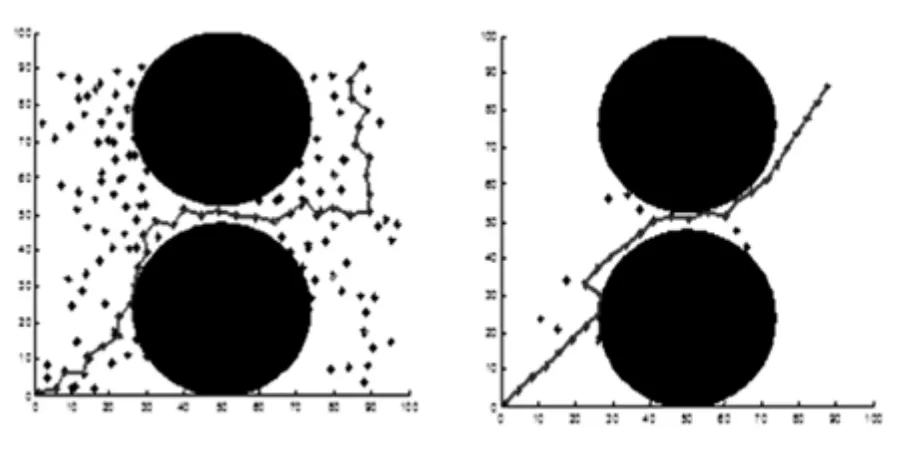
2.2 雙向RRT 算法
2.3 動(dòng)態(tài)步長RRT 算法


3 RRT 算法與其他算法結(jié)合
3.1 融合A*算法的改進(jìn)
3.2 融合曲線平滑連接的改進(jìn)
4 總結(jié)
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
公民與法治(2020年11期)2020-07-25 02:02:06
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀(jì)智能(英語備考)(2019年12期)2020-01-13 06:07:18
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
