基于超寬帶的變電站人員安全防護報警系統
2019-11-28 06:20:56彭志恒劉德康陳張平王春達
實驗技術與管理 2019年11期
楊 波,彭志恒,劉德康,陳張平,王春達
基于超寬帶的變電站人員安全防護報警系統
楊 波,彭志恒,劉德康,陳張平,王春達
(杭州電子科技大學 自動化學院,浙江 杭州 310018)
為防止變電站內發生人員誤入非安全區,設計了一種基于超寬帶的變電站人員安全防護報警系統。該系統需人員佩戴UWB定位標簽,輔以機器人指定路線巡邏進行突增非安全區域標注,并將其上傳至后臺,實現對人員的危險區域安全報警防護。通過在非安全區域外圍設置報警區域,一旦人員進入,立即對其報警提醒。經測試,系統失報(應報警但未報)率為0.15%,誤報(不應報警卻發出警報)率為0.36%。
變電站;安全防護;機器人;超寬帶報警系統
變電站等電力行業的生產設備大型化、密集化,潛在危險多,對變電站員工的安全管理尤為重要[1]。本文設計一種基于超寬帶的變電站人員安全防護報警系統。該系統由工作人員佩戴超寬帶(ultra wideband,UWB)標簽,輔以機器人實現工作人員安全防護[2-3],通過基站后臺完成對機器人和工作人員的實時定位和實時位置顯示[4-5]。機器人以不同方式巡邏,后臺人員通過查看攝像頭畫面判定變動危險區域(變危區),將區域坐標正向標注于機器人,亦可由現場工作人員發現后反向標注于機器人,設定機器人在危險區巡邏和報警,使誤入固定危險區域(固危區)、變危區的概率降低到極小值。
1 總體方案設計
基于超寬帶的變電站人員安全防護報警系統,以UWB的高精度定位為主、機器人為輔,實現在變電站環境中的提前報警。機器人的總體設計方案主要涵蓋基于三輪全向式移動底盤的運動單元、基于UWB模塊的定位單元、基于ARM的控制單元、基于攝像頭的監控識別單元以及供電電源、串口通信。
機器人使用三輪全向輪,具有良好的運動性,可以在平面內任意方向運動,且結構簡單、易于控制。
UWB定位單元包括移動標簽(Tag)和固定基站(Anchor),基于雙路測距(two way ranging,TWR)[6]算法對采集的數據進行濾波優化,得到穩定的輸出Tag定位坐標信息。輔以陀螺儀為機器人運動提供加速度、航向角信息。
控制系統基于ARM芯片,處理傳感器數據決策機器人運動狀態、解算Tag坐標、控制機器人實現語音報警等功能。
UWB配合后臺軟件劃定電子圍欄;當檢測到有工作人員在危險區域內時,機器人會前往報警提示,并警示監控室的安保人員。
2 系統硬件設計
2.1 運動控制系統
運動控制系統以ARM芯片為控制核心,根據來自紅外傳感器、UWB定位系統等的數據信息完成機器人運動狀態的控制決策,輸出PWM波形到驅動模塊。機器人采用帶編碼器的直流電機,構成運動單元的反饋控制[7],有效調節電機轉速。運動控制系統硬件設計如圖1所示。

圖1 運動控制系統硬件設計
2.2 UWB定位系統
在復雜環境下,由于多徑效應等的影響,各種方式的定位誤差明顯增大,UWB定位系統因其獨特的通信原理,具有多徑分辨率強、功耗低、抗干擾能力強等特點。基于UWB搭建的機器人定位系統包括3個Anchor和一個機器人端Tag。
Anchor與Tag硬件設計完全相同,均包含Stm32主控芯片和DecaWave公司開發的DW1000芯片,二者依靠SPI方式進行數據通信。UWB定位模塊負責完成Anchor-Tag測距信息的采集、濾波、優化。Tag安裝于機器人主控板,通過串口將距離數據傳輸到運動控制系統的ARM芯片,由其完成機器人實時坐標的解算。定位系統硬件設計如圖2所示。

圖2 UWB定位系統硬件設計
3 系統軟件設計
變電站人員安全防護報警系統的軟件設計主要包括UWB實時定位、危險區域報警、智能跟隨、自定義路線巡邏、正向標注危險區域。
3.1 UWB實時定位
采用UWB是低成本、精確定位的可靠方案。本文使用TWR測距,基站和標簽進行雙向通信,交換各自的發送時間和接收時間信息,計算TOF(time of flight),得到基站—標簽間測距信息。再采用三邊測量算法實現標簽定位,計算標簽實時坐標位置。
3.1.1 測距算法
采用雙路測距算法,該算法雙向測量,不需要進行節點間的數據同步,數據包在空中傳遞的時間為:


最終得到基站—標簽間距離為

其中為光速。
3.1.2 三邊測量法
(4)
3.1.3 去極值最小二乘法


令:
其中:

即
得方程組:

求解得擬合方程為

3.2 危險區域報警
在巡邏過程中,機器人搭載攝像頭將采集的信息實時傳送給后臺觀測、調控并進行人臉檢測,對無關人員進行采集報備提示后臺;搭載語音模塊,實現與現場人員之間的語音交互,并提示現場人員注意周圍的危險區域;后臺對進入變危區的人員進行標紅,并輔以機器人提示,防范突發情況的發生。危險區域報警流程如圖5所示。
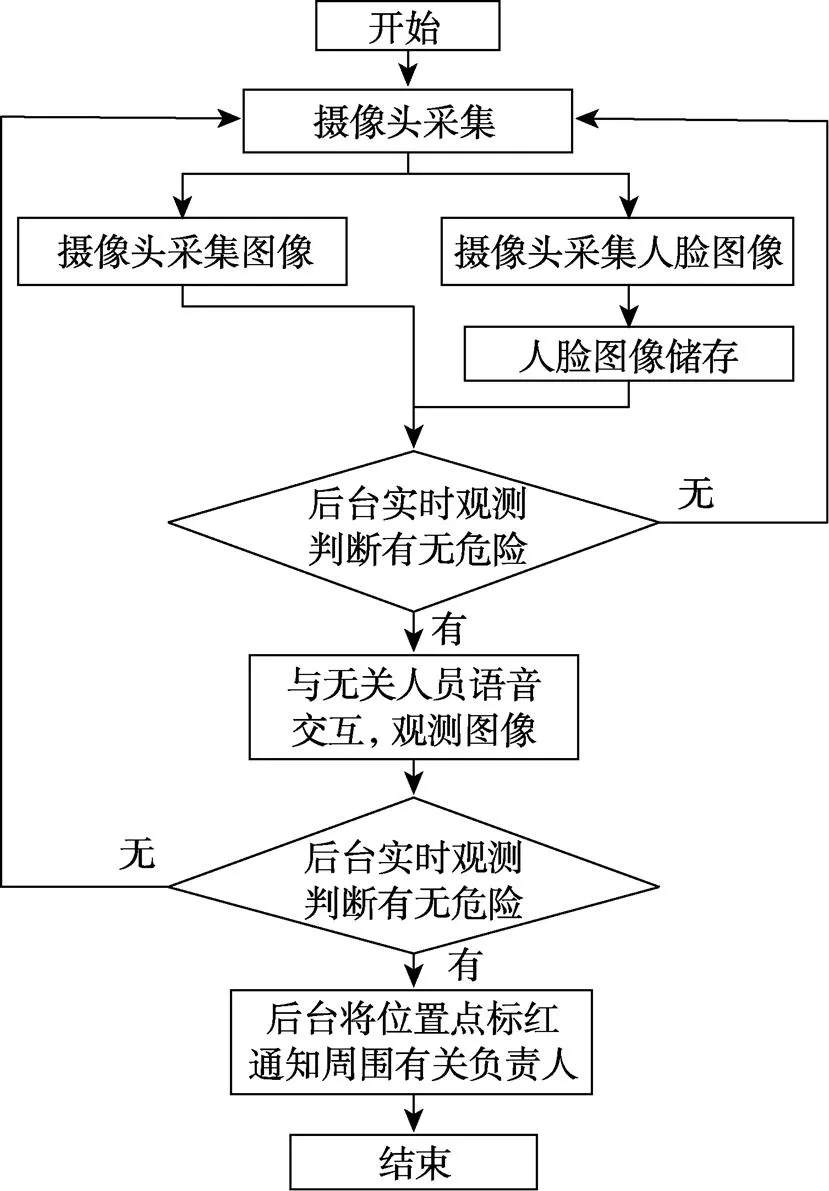
圖5 危險區域報警流程
3.3 智能跟隨
在生產現場,每個危險區域都對應有2個預警區域組成一個報警區域(見圖6)。人員一旦踏入一級預警區域時,離人員最近的機器人開始加速向其所在的位置移動,在到達人員的附近時開啟語音預警提示人員,并實時跟隨人員;當人員進入二級預警區域,機器人立即開啟危險區域報警;如果人員離開一級預警區域,則機器人恢復正常巡邏。

圖6 報警區域示意圖
3.4 自定義路線巡邏
機器人的巡邏方式分為2種。
(1)設定路線巡邏。機器人按照設定路線在固定的危險區域附近進行巡邏。
(2)變動路線巡邏[10]。一是變動危險區域巡邏方式,即當后臺設定新的變危區時,離危險區域最近的空閑機器人收到后臺指令后快速前往該區域進行巡邏;二是后臺人員自定義巡邏方式,即當工作人員想查看工廠的某些地方的情況時,就可以在后臺選中處于空閑的機器人進行自定義路線編輯,機器人收到指令后,便會開始該路線的巡邏,而工作人員通過機器人所搭載的攝像頭可以查看工廠各處情況。
3.5 正反向標注危險區域
當出現變危區,且維修人員未到達之前,需要通過正反向標注危險區域以提示現場人員。
機器人在巡邏過程中,將所拍攝的視頻信息實時傳給后臺,后臺人員根據此視頻信息判斷危險區域,并通過機器人的遠端操控功能對危險區域重新進行范圍標注并生成報警區域。機器人將對新的變危區進行巡邏,實現正向標注危險區域。
當工人發現新的危險區域時,開啟機器人跟隨功能,使機器人移動至該區域,通過機器人將危險區域坐標傳輸給后臺,由后臺生成報警區域,機器人將開始在新的變危區進行巡邏,實現反向標注危險區域。
4 實驗結果分析
在變電站環境下進行了UWB室外定位、UWB報警區域報警效果、UWB報警區域報警成功率與人的行走速度關系的實驗,并對去極值最小二乘法進行了Matlab仿真。實驗測試場地如圖7所示。
4.1 UWB室外定位實驗結果與分析
UWB定位實驗在長6.5 m、寬5 m的矩形區域內進行,基站搭建于矩形的3個頂點,UWB定位模塊高度2.5 m。矩形區域內選定10個測試點,標簽坐標的測量值及誤差數據如圖8所示。
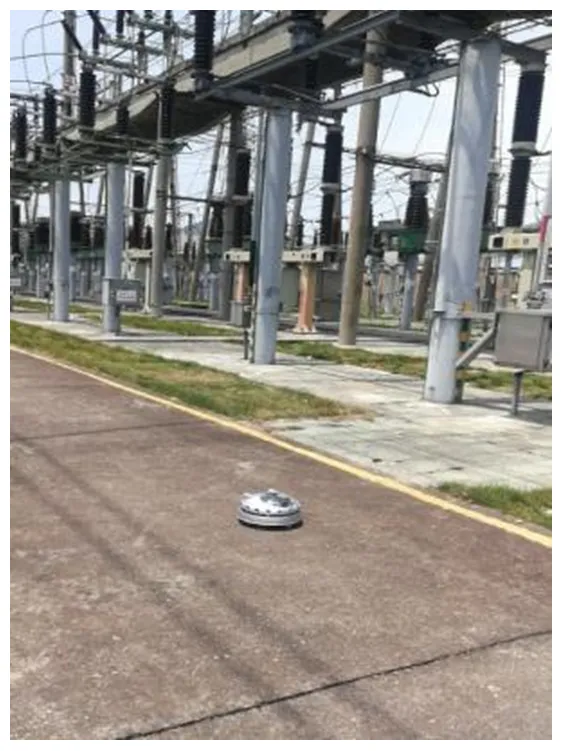
圖7 實驗測試場地
由圖可知,UWB定位精度穩定在10 cm內,滿足變電站人員安全防護報警所需的定位精度條件。
4.2 去極值最小二乘法仿真
采集了機器人運動過程中的一段數據,在Matlab中分別使用普通最小二乘法與去極值最小二乘法進行預測跟蹤,其中數據序列長度5,擬合函數最高次冪為2,仿真結果如圖9所示。
去極值最小二乘法可有效跟蹤實際運動軌跡,并在UWB定位缺失時提供可靠的預測結果。與普通最小二乘法相比,可有效去除數據抖動、提高平滑性。
4.3 UWB報警區域報警效果實驗結果與分析
人的行走速度和報警區域的大小都會影響系統的報警正確率。選擇以60.7 cm為邊長的正方形區域作為初始測試區域,每次面積縮小一半且保持正方形形狀不變,由下式可以依次得出測試的面積與邊長:


將人的運動速度分為5個等級:1級(0~0.48 m/s);2級(0.48~0.72 m/s);3級(0.72~0.96 m/s);4級(0.96~1.20 m/s);5級(1.20~1.44 m/s)。保持測試面積不變,在同一測試面積下讓人以5種不同的行走速度通過該區域,然后測試人通過該報警區域時后臺的報警成功率,具體如表1所示。
由表1可知,在邊長為21.24 cm的正方形以上的報警區域,在5種速度下報警率為100%;在邊長為21.24 cm的正方形以下的報警區域報警率隨著人的速度增大而減小。實驗結果滿足系統所需要的高報警率的要求。

圖8 UWB室內定位實驗結果分析

圖9 去極值最小二乘法仿真
4.4 UWB報警區域報警效果實驗結果與分析
在工廠定位的范圍內,人為設置一個中心坐標為(220 m,218 m),半徑為3.5 m的圓形危險區域(見圖10)。后臺自動生成一個圓心坐標不變的半徑為7.5 m的報警區域。
圖10中,虛線同心圓表示人為設定的危險區域與自動生成的報警區域,小點代表報一次警機器人的位置,加號代表了未報一次警機器人的位置,叉號代表了報警失誤一次機器人的位置。機器人在沿著報警區域邊界運行時共測試了7700次,其中失報了12次,失報率為0.15%;機器人在報警區域內運行時共測試了2500次,其中誤報了9次,誤報率為0.36%。

表1 UWB報警區域內報警成功率 %

圖10 UWB報警區域報警效果
5 結語
基于超寬帶變電站人員安全防護報警系統實現了對人員誤入變危區的安全報警防護,并在后臺實時顯示人員與機器人的坐標位置,通過后臺工作人員操控機器人定點到達查看各變電站的情況。該安全防護報警系統具有普適性,除變電站外,亦適用于其他工廠,因此超寬帶的變電站人員安全防護報警系統具有足夠的實用性。
[1] 朱旭,張志剛,李玲.智能變電站運維隱患危險點分析及防治[J].中國戰略新興產業,2018(32): 194.
[2] YANG G, SHENG L, XIANG W. A patrol mobile robot for power transformer substations based on ROS[C]//2018 Chinese Control And Decision Conference (CCDC), 2018: 456–460.
[3] PORTUGAL D, RUI P R. Performance Estimation and Dimensioning of Team Size for Multirobot Patrol[J]. IEEE Intelligent Systems, 2017, 32(6): 30–38.
[4] LOYEZ C, ROLLAND N, BOCQUET M. UWB technology applied to millimeter-wave indoor location systems[C]// International Radar Conference, 2014: 1–5.
[5] HANSSENS B, PLETS D, TANGHE E, et al. An Indoor Variance-Based Localization Technique Utilizing the UWB Estimation of Geometrical Propagation Parameters[J]. IEEE Transactions on Antennas and Propagation, 2018, 66(5): 2522–2533.
[6] 彭笑,張丹紅,熊斌宇,等.基于DW1000的室內定位系統設計與穩定性優化[J].廣西大學學報(自然科學版),2018, 43(5): 1803–1810.
[7] KIM K B, KIM B K. Minimum-Time Trajectory for Three- Wheeled Omnidirectional Mobile Robots Following a Bounded- Curvature Path With a Referenced Heading Profile[J]. IEEE Transactions on Robotics, 2011, 27(4): 800–808.
[8] 王文華.室內定位系統網關及監控服務平臺設計與實現[D].南京:東南大學, 2015.
[9] 賈小勇,徐傳勝,白欣.最小二乘法的創立及其思想方法[J].西北大學學報(自然科學版),2006, 36(3): 507–511.
[10] CHEN Xu. Fast Patrol Route Planning in Dynamic Environments[J]. IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans, 2012, 42(4): 894–904.
Safety protection and alarm system for substation personnel based on ultra wideband
YANG Bo, PENG Zhiheng, LIU Dekang, CHEN Zhangping, WANG Chunda
(College of Automation, Hangzhou Dianzi University Hangzhou 310018, China)
In order to prevent the occurrence that people enter the unsafe area by mistake in the substation, a high-precision patrol robot system combining UWB with machine vision is designed. This system requires personnel to wear UWB positioning tags and patrol designated routes of robots to mark sudden increase of unsafe areas and upload them to the background to achieve safety alarm protection for workers in dangerous areas. By setting an early warning area on the periphery of the unsafe area, workers will be alerted as soon as they enter the area. After testing, the rate of system failure to report (should alarm but not report) is 0.15%, and the rate of system failure to report (should not alarm but alarm) is 0.36%.
substation; safety protection; robot; UWB alarm system
TP302
A
1002-4956(2019)11-0141-05
10.16791/j.cnki.sjg.2019.11.034
2019-05-08
國家自然科學基金項目(61703130);國家級大學生創新創業項目(201810336022)
楊波(1998—),男,甘肅蘭州,本科生,主要研究方向為機器視覺。E-mail: czp.apple@hdu.edu.cn
陳張平(1987—),男,浙江德清,碩士,講師,主要研究方向為功率超聲、優化控制。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
河南電力(2015年5期)2015-06-08 06:01:45
電測與儀表(2015年5期)2015-04-09 11:30:52
水電站機電技術(2014年1期)2014-09-26 11:59:53