基于PSO-IGA算法的高性能十字陣列的設計與綜合
2019-10-18 07:26:08江冰,緱琳,唐玥
測控技術 2019年9期
江 冰,緱 琳,唐 玥
(河海大學物聯網工程學院,江蘇常州 213022)
作為多輸入多輸出(Multiple Input Multiple Output,MIMO)雷達系統研究設計極其重要的部分,陣列天線很大程度上決定了雷達的性能[1]。與線性陣列相比,平面陣列可以實現數字波束在俯仰角和方位角同時掃描目標,以達到更精確、全方位的目標探測性能。然而,平面陣列需使用大量陣元及其他射頻器等,增加了雷達系統的復雜性和成本[2-3]。為降低MIMO雷達制造成本和系統復雜度、提高工程應用中的實用性,結合俯仰角和方位角波束的十字陣列MIMO雷達可以極大地滿足該需求,能夠有效地解決雷達性能與成本之間的矛盾關系。文獻[4]在十字陣列中采用并行子陣波束實現三維聲吶成像,降低了計算量。文獻[5]使用ESPRIT算法降低回波數據維度,使用空間聯合技術進行目標角度估計。
其次,陣列天線綜合使得陣列天線具有極窄的主瓣寬度和抑制旁瓣等特點的同時能更進一步減少陣元使用數量。早期陣列天線綜合方法主要是根據實際需求對方向圖進行數值計算、變換代換和分析,如道爾夫-切比雪夫綜合法、泰勒綜合法等[6]。現代智能優化算法因其綜合精度高、使用范圍廣等特點有效地應用于規模較大、復雜性較高的陣列布陣優化問題。目前較成熟且應用廣泛的智能優化算法有神經網絡算法、遺傳算法、粒子群優化算法、免疫算法等[6]。文獻[7]首次將遺傳算法應用于陣列天線綜合。文獻[8]提出使用遺傳算法優化陣列天線的陣元激勵,獲得了帶零陷角度的方向圖。文獻[9]使用改進粒子群算法優化了給定零陷和最高旁瓣電平的稀疏線性陣列天線。
本文設計了一種結合方位角和俯仰角波束的改進十字陣列天線,在保持較高角度分辨率的同時極大地降低了陣元的使用數量,同時使用免疫粒子群算法對該十字陣列進行稀疏優化布陣,該算法具有更高的收斂速率,經過優化布陣后的十字陣列具有優越的相對旁瓣電平以及低廉的制造成本。
1 改進十字陣列天線
1.1 改進十字陣列天線模型
考慮如圖1所示的M+N元十字陣列天線,在X軸和Y軸上各自分布著均勻直線陣列,其中,X軸上有M個陣元,陣元間距為dx,產生俯仰角方向上的數字波束;Y軸上有N個陣元,陣元間距為dy,產生方位角方向上的數字波束。假設一個方位角為θ、俯仰角為φ遠場窄帶平面波穿過該平面陣,結合方位角和俯仰角波束,該十字陣列的方向圖函數如式(1)所示。
式中,ωxm為X軸上第m個陣元的加權系數;ωyn為Y軸上第n個陣元的加權系數,且ωmn=ωxm×ωyn,k=2π/λ。

圖1 M+N元十字陣列天線
結合MIMO技術,在十字陣列各端添加發射陣元,形成如圖2所示的M+N+4元改進十字陣列。方位角方向上可視為一個2發N收的線性陣列,且發射陣元間隔dt與接收陣元間隔dr之間存在倍數關系dt=Ndr,則該線性陣列的方向圖函數可由式(2)表示[10]:
式中,ωt為第t個發射陣元的加權系數;ωr為第r個接收陣元的加權系數,且 ωp=ωtr=ωt×ωr,k=2π/λ。由式(2)可看出,方位角方向上的2發N收的MIMO陣列性能等同于1發2N收的單輸入多輸出(Single Input Multiple Output,SIMO)陣列;同理,俯仰角方向上的2發M收的MIMO陣列性能等同于1發2M收的SIMO陣列。由此可得,該M+N+4元改進十字陣列具有與2M+2N元十字陣列相同的陣列天線性能。
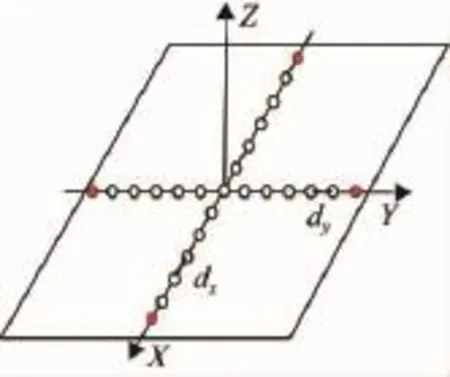
圖2 M+N+4元改進十字陣列天線
位于坐標中心的50+50柵格的改進十字陣列,柵格點代表一個陣元,間距為d=λ/2。X軸與Y軸陣列陣元數量均為N,各向同性且相位相同,陣列孔徑均為D。為了在優化過程中始終保持陣列孔徑的大小,將第1個和第N個陣元固定在第1個和最后1個柵格,因此陣元位置可以表示為 Sx=[-D/2,x1,…,xN-2,D/2]T與 Sy=[-D/2,y1,…,yN-2,D/2]T,且關于 X軸和Y軸對稱,即有dx=dy。引入天線標志位Cn來表示第n個天線位置上是否存在天線陣元,即Cn=0表示第n個柵格上不存在陣元,Cn=1表示第n個柵格上存在陣元。由此可將式(1)轉化為

改進十字陣列方向圖最大相對副瓣電平(Maximum Sidelobe Level,MSLL)可確定親和力函數為

式中,max(·)為求最大值的函數;AF(θ,φ)為主瓣峰值;A為方向圖的旁瓣區域,假設主瓣的寬度為2θω,方向圖的可視區域為[-π/2,π/2],則該區域A可表示為

1.2 改進十字陣列天線的性能仿真
考慮如表1所示的三種配置參數的陣列天線。為了更好地對比分析改進十字陣列的性能,其中矩形陣列和十字陣列分別采用單向和雙向波束形成。設置信噪比為-10 dB,所形成方向圖為旁瓣電平為-20 dB的道爾夫-切比雪夫分布。
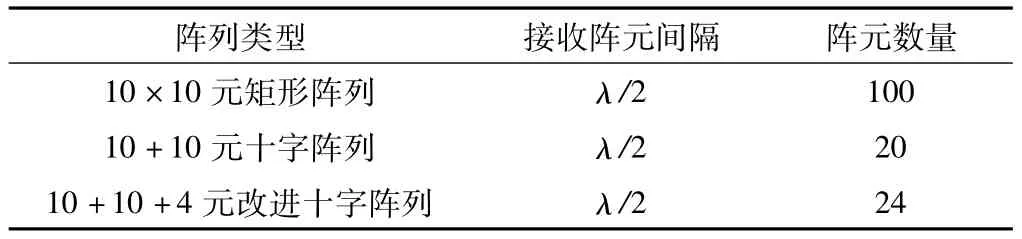
表1 矩形陣列、十字陣列、改進十字陣列的參數配置
三種陣列天線產生的方位角方向的方向圖如圖3所示,可以看出24元改進十字陣列主瓣寬度均比其他陣列天線的主瓣寬度窄,為20元十字陣列天線單向波束形成時主瓣寬度的0.5倍;其旁瓣高度幾乎與其他陣列天線單向波束形成時的方向圖相同,約等于其他陣列天線雙向波束形成的0.5倍。由此可以表明,由此可以表明,與M×N元平面陣列相比,M+N+4元改進十字陣列中陣元使用數量從M×N個減少到M+N+4個,使得該十字陣列在保持著較高的角度分辨率的同時有效地降低了系統成本;與M+N元十字陣列相比,M+N+4元改進十字陣列通過添加4個發射陣元提高了系統的角度分辨率。
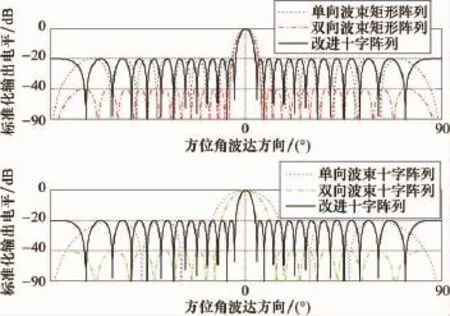
圖3 改進十字陣列與矩形陣列、十字陣列方位角方向圖對比
2 免疫粒子群算法
2.1 改進的粒子群算法
為進一步提高改進十字陣列的性能,降低系統的復雜性,采用現代智能優化算法對該陣列進行優化布陣,其中粒子群(Particle Swarm Optimization,PSO)算法能充分利用種群間個體信息共享機制進行全局隨機搜索[6]任意次迭代過程中,粒子根據兩個極值調整速度和飛行方向:個體最優解 pBest和全局最優解gBest[11-12]。在迭代過程中,粒子受 gBest的影響較大,當gBest僅在局部為最優值時,以gBest為中心的區域內收斂速度很快,容易造成迭代過程停滯。
為減小種群對gBest的依賴,首先引入模糊全局最優值fBest作為粒子速度和位置更新的參數;其次,根據粒子之間的相似度大小將粒子群分類,分別為最優子群、次優子群和最差子群。使用不同準則更新不同子群的中粒子的速度和位置,降低gBest對整個種群的影響,提高粒子的全局搜索能力。其中,fBest為正態分布的隨機變量,其定義如式(6)。
式(6)中,σ為一個遞減函數,用來描述gBest的作為最優解的不確定程度,其意義是,隨著搜索的進行,gBest作為最優解的可能性越大。式(7)中,gmax為迭代次數,σmax、σmin和 α 分別取0.15、0.0001 和 0.4。
假設粒子群體的個數為M,粒子維度為N,則第i(i=1,2,…,M)個粒子第a代的種群位置為X=(xai1,置之間的親和度,進行排序分組,可得粒子i第a代飛行過程中個體最優位置fBesti和種群最優位置gBesti。所有粒子第a代飛行結束后得到的最優種群位置為Aa=(gbest1a,gbest2a,…,gbestam1),根據式(6)可得模糊全局最優值為 Fbesta=(fbest1a,fbest2a,…,fbestam1),則最優子群中粒子的更新速度和位置計算公式如下:

式中,rand1和 rand2為[0,1]之間的隨機數;慣性權重值ω和學習因子c1、c2的計算公式如下:
式中,di代表i粒子與其他粒子的平均距離;dmax和dmin分別為最大值和最小值。di由式(14)所得。

式中,M1代表最優子群中粒子個數;N代表每個粒子的維數。
次優子群隨機選擇最優子群中的gBestj作為更新參數,位置更新如式(9)所示,速度更新公式如式(15)所示。

最差子群隨機選擇模糊全局最優值作為更新參數,子群中粒子速度更新公式如式(16)所示,位置更新公式同式(9)。

2.2 算法步驟
使用改進的粒子群算法優化免疫遺傳算法且將其應用于陣列天線綜合,算法步驟如下:
步驟1,初始參數:種群大小M,進化代數gmax,抗體相似性系數η,變異率pm,粒子每一維最大最小速度Vmax、Vmin,最大最小坐標 Xmax、Xmin。
步驟2,輸入目標函數作為抗原,即設置親和力函數如公式(4)所示。同時,初始化陣元位置種群X1={x1,x2,…,xM}和速度 V1={v1,v2,…,vM}。
步驟3,計算每個抗體 xi(i=1,2,…,M)和抗原MSLL函數的親和度,同時可以計算出全局極值gBest和個體極值pBest。
步驟4,在進化代數小于gmax且未達到算法精度要求時,進行以下操作:
① 計算陣元 y2i(i=1,2,…,M)和陣元 xj(j=1,2,…,M)之間的親和度 xi,j;
② 計算陣元xi(i=1,2,…,M)的抗體濃度 Ci和生存期望值E(xi),并對生存期望值E={E(x1),E(x2),…,E(xM)}進行排序;
③取出抗體生存期望值較高的前M1(M1≥M)個陣元得到新的陣元位置Y1,對新的陣元位置Y1進行交叉和變異操作得到子代陣元位置Y2={y21,y22,…,y2M1};
④ 計算子代陣元 y2i(i=1,2,…,M1)與抗原MSLL函數的親和度;
⑤將父代陣元位置Y2和子代陣元位置Y1合并,得到一個包含2×M1陣元的種群Y3={y31,y32,…,y3*2M1};
⑥計算Y3與抗原的親和度,選擇親和度較高的前M個抗體作為新的陣元位置種群X2={x21,x22,…,x2M};
⑦ 根據x2i(i=1,2,…,M)之間的親和度更新陣元的pBest與gBest,若更優,則更新,否則不變;
⑧ 計算慣性加權值ω和學習因子c1、c2,根據x2i=(i=1,2,…,M)之間的親和度對X2進行粒子群優化算法更新,使用模糊全局最優值更新分組后子群中的抗體的速度和位置。
步驟5,輸出全局最優解gBest,更新陣元位置。
3 仿真實驗與分析
3.1 基于免疫粒子群的改進十字陣列的性能分析
設定柵格50+50改進十字陣列天線,X軸與Y軸上陣元個數均為20,陣元各向同性且幅值相位相等,柵格間距為d=λ/2。初始設置如下:種群大小N=100,進化代數gmax=500,抗體相似性系數η=0.8,變異率 pm=0.7,加權系數 ω=0.9,學習因子 C=1.49445,粒子最大速度Vmax=0.5λ,各坐標軸上陣元最大、最小位置為Xmax=12.5λ、Xmin=-12.5λ及Ymax=12.5λ、Ymin=-12.5λ,且 Xi=Yi(i=-10,…,10)。
采用免疫粒子群算法進行改進十字陣列綜合得到方向圖如圖4所示。優化結束時,算法進化到361代,優化后 X軸正半軸陣元位置分布為1001000101110000100001101,陣 列 天 線 MSLL為-17.56087 dB,運行耗時2'13.6740″。為了更加明確地對比分析,圖4同時給出了采用免疫遺傳算法得到的陣列方向圖,圖5給出了兩種算法最優值與進化代數之間的關系。
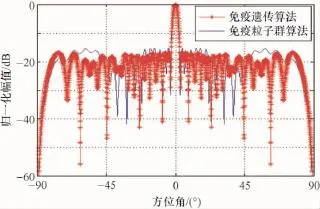
圖4 免疫粒子群算法與免疫遺傳算法方向圖對比
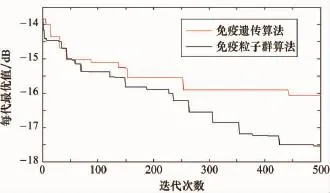
圖5 算法迭代過程中的性能優化曲線
由圖4和圖5可知,采用免疫粒子群算法綜合后得到的十字陣列天線的MSLL為-17.56087 dB,免疫遺傳算法的結果為-16.08135 dB,使用免疫粒子群算法優化后得到了更優的目標值MSLL。兩種算法均可在給定的迭代次數內得到MSLL,免疫粒子群算法的解可在較少的進化代數內無限接近于MSLL,而免疫遺傳算法尋找MSLL的過程經過較多的步數,充分顯示了免疫粒子群算法具有更好的收斂能力。
仿真分析陣列稀疏度與改進十字陣列性能之間的關系。設置柵格數50+50,使用免疫粒子群算法對改進十字陣列在稀疏度分別為80%、60%、40%和12%時進行陣列天線的稀疏布陣,仿真結果如表2所示,由于改進十字陣列陣元關于X軸與Y軸對稱,所以表中僅列出X軸正半軸陣元位置分布。從仿真結果可知,在相同孔徑不同稀疏度時,使用免疫粒子群算法優化出的稀疏陣列的性能不同。隨著稀疏度的上升,陣列天線的MSLL逐漸變大,即呈現出逐漸遞增的趨勢。仿真實驗中固定了陣列孔徑,因此隨著稀疏度的不同,半波束寬度幾乎沒有變化趨勢。
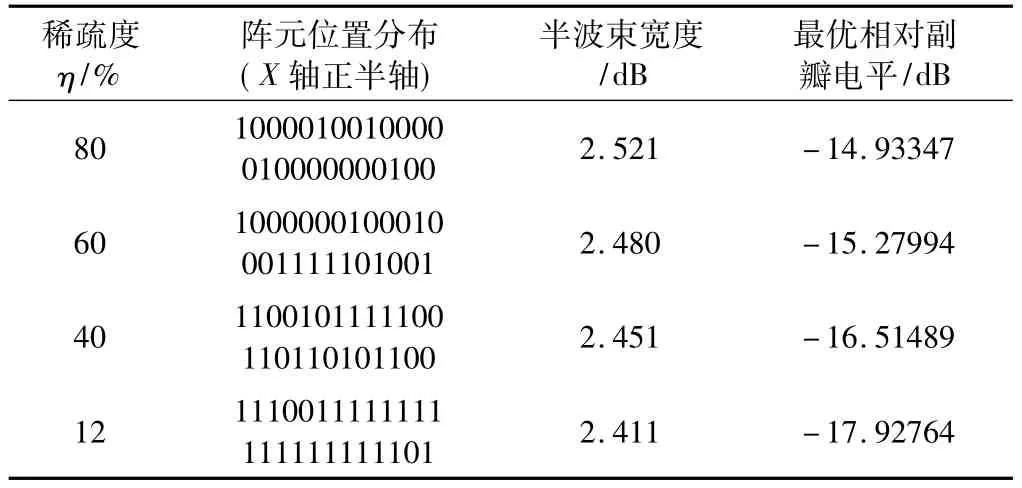
表2 不同稀疏度下改進十字陣列天線主要參數
3.2 目標探測性能仿真
仿真實驗1:等距不等角雙目標探測。設兩個等距離目標的方位角 -俯仰角分別為(90°,90°)和(122°,101°)。脈沖信號頻率 f0為24 ×109Hz,信號帶寬為200×106Hz,掃描角范圍為[0° 180°],掃描角范圍內采樣點數為10000,柵格等間距放置,間距d=λ/2。使用稀疏度為44%的改進十字陣列天線進行目標探測,所得的掃描結果如圖6所示。仿真結果表明稀疏度為44%的改進十字陣列天線在對等距雙目標探測中出現多個假目標,無法準確識別目標的角度信息。
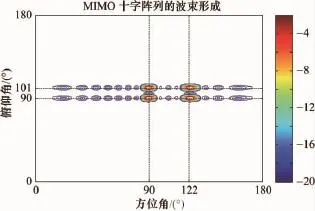
圖6 等距不等角雙目標探測結果
仿真實驗2:距離角度均不同雙目標探測。設目標1的距離為200 m,方位角 -俯仰角為(90°,90°);目標2的距離為220 m,方位角 -俯仰角為(100°,98°)。使用稀疏度為44%的改進十字陣列天線進行目標探測,所得的掃描結果如圖7所示。仿真結果表明稀疏度為44%的改進十字陣列天線可以準確探測距離和角度均不同的兩個目標。
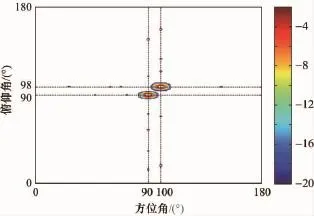
圖7 距離角度均不同的雙目標探測結果
4 結束語
基于保證陣列天線性能的同時減少使用陣元數量的需求,設計了一種改進十字陣列天線,使用MIMO技術在方位角和俯仰角方向上同時進行空域濾波,有效地提高了陣列的角度分辨率,極大地降低了系統的成本。同時,使用免疫粒子群算法進行陣列綜合,相關仿真結果表明,基于免疫粒子群算法的改進十字陣列具有更少的陣元數量、更低的副瓣電平,以及更快速的迭代效率。最后,優化布陣的改進十字陣列使用數字波束形成技術進行目標探測,實驗結果表明,該陣列天線具有較好的距離、角度探測性能。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
計算機應用(2021年1期)2021-01-21 03:22:38
