時滯執(zhí)行器飽和Markov跳變系統(tǒng)的有限時間鎮(zhèn)定
2019-10-18 07:26:38張遠敬
測控技術(shù) 2019年9期
張遠敬,彭 力,2
(1.江南大學(xué)物聯(lián)網(wǎng)工程學(xué)院物聯(lián)網(wǎng)應(yīng)用技術(shù)教育部工程研究中心,江蘇無錫 214122;2.無錫太湖學(xué)院江蘇省物聯(lián)網(wǎng)應(yīng)用技術(shù)重點建設(shè)實驗室,江蘇無錫 214064)
Markov跳變系統(tǒng)是一類受內(nèi)部離散事件作用,導(dǎo)致系統(tǒng)參數(shù)隨機變化的特殊混雜系統(tǒng)。同時,實際的控制系統(tǒng)經(jīng)常遭遇來自外界的隨機干擾以及內(nèi)部元器件的損壞,例如航天航空飛行器、通信網(wǎng)絡(luò)、經(jīng)濟系統(tǒng)等[1-2]。基于Markov鏈的隨機特性,衍生了很多實際場景中的應(yīng)用[3-4],并且由于Markov跳變系統(tǒng)能夠很好地描述受外部干擾等影響的實際系統(tǒng),因此得到了廣泛的關(guān)注與研究。例如:Senthikumar[5]研究了Markov跳變系統(tǒng)的穩(wěn)定性分析問題。Wu[6]研究了Markov跳變系統(tǒng)的異步濾波問題。
在Markov跳變系統(tǒng)中,狀態(tài)轉(zhuǎn)移概率是決定系統(tǒng)行為的關(guān)鍵因素。考慮到實際過程中,系統(tǒng)的轉(zhuǎn)移概率總是部分未知的。因此,研究具有部分未知轉(zhuǎn)移概率的Markov跳變系統(tǒng)的相關(guān)系統(tǒng)理論是有必要的。到目前為止,這方面的研究已經(jīng)取得了不錯的進展,如Du[7]研究了其系統(tǒng)的穩(wěn)定性,Qi[8]研究了這種系統(tǒng)的狀態(tài)反饋控制器設(shè)計問題,Yang[9]研究了系統(tǒng)的魯棒非脆弱H∞控制等。
在許多實際應(yīng)用中,需要考慮系統(tǒng)在有限時間內(nèi)的行為,系統(tǒng)的狀態(tài)響應(yīng)在有限時間內(nèi)滿足一定的界限。在過去的幾十年里,有限時間穩(wěn)定性或有界性的問題引起了越來越多的關(guān)注。隨著Lyapunov函數(shù)和線性矩陣技術(shù)的發(fā)展,這方面的研究也取得了一定的成果,如Zhang[10]研究了奇異隨機系統(tǒng)的觀測器設(shè)計問題,Zhang[11]針對系統(tǒng)的穩(wěn)定性進行了分析,Amato[12]研究了系統(tǒng)的動態(tài)輸出反饋問題等。
另一方面,在實際的工程系統(tǒng)中,時間延遲和執(zhí)行器飽和始終是導(dǎo)致系統(tǒng)不穩(wěn)定以及性能差的主要原因,尤其出現(xiàn)在交通、化學(xué)反應(yīng)過程以及機器人工程等領(lǐng)域。Zhang[13]提出 Abel引理對時延系統(tǒng)建立穩(wěn)定性條件,Zhang[14]研究了具有時延和執(zhí)行器飽和的切換線性系統(tǒng)的容錯控制問題。近年來,在時滯和執(zhí)行器飽和線性系統(tǒng)方面[15-16],以及相關(guān)非線性系統(tǒng)控制方面[17-18]都取得了一定的成果。
對于一系列特殊的復(fù)雜隨機系統(tǒng)來說,具有時延和執(zhí)行器飽和的離散Markov跳變系統(tǒng)能夠很好地描述隨機干擾因素,包括突發(fā)性的故障、外部的干擾和環(huán)境因素的突變等。然而,對于這類系統(tǒng)在轉(zhuǎn)移概率部分未知情況下,有限時間控制的研究結(jié)果較少。考慮到上述情況,并考慮具有執(zhí)行器飽和以及轉(zhuǎn)移概率部分未知的離散時滯Markov跳變系統(tǒng),討論了系統(tǒng)在時延情況下的有限時間鎮(zhèn)定(FTS)問題。
1 系統(tǒng)描述及相關(guān)引理
考慮含執(zhí)行器飽和以及固定時滯的離散時間Markov跳變系統(tǒng):

式中,xk∈Rn,μk∈Rm分別為系統(tǒng)的狀態(tài)向量和控制輸入向量;dk∈Rp為未知但有界的擾動信號;xk=φ(k),k=-τ,-τ+1,…,-1,0為系統(tǒng)的初始狀態(tài);A(rk),Ad(rk),B(rk),Bd(rk)分別為已知的具有適當(dāng)維數(shù)的與模態(tài)rk相關(guān)的常數(shù)矩陣,其中rk為系統(tǒng)的模態(tài),在集合S={1,2,…,N}中隨離散時間取值的時齊Markov鏈,其狀態(tài)轉(zhuǎn)移概率定義為

考慮轉(zhuǎn)移概率部分未知的情況,轉(zhuǎn)移概率∏ ={pij}中有部分元素是未知的。對于?i∈S,集合Si=概率的元素集合和未知轉(zhuǎn)移概率的元素集合。如果
在有限時間步長L>0內(nèi),未知輸入擾動信號滿足:

為了方便后續(xù)引用,當(dāng) rk=i時,分別用 Ai,Adi,Bi,Bd來表示 A(rk),Ad(rk),B(rk),Bd(rk)。
考慮基于狀態(tài)反饋的控制器,其形式為

式中,Ki∈Rm×n為控制器增益。
下面先給出系統(tǒng)有限時間有界(FTB)和有限時間鎮(zhèn)定(FTS)的相關(guān)定義。
定義1[19](有限時間有界)對于給定的有限時間步長 L,系統(tǒng)(1)(μk=0)是關(guān)于(c1,c2,L,d)有限時間有界的,如果滿足條件(3)的擾動dk,下列條件成立:

式中,c1<c2,L為給定的正整數(shù)。
定義2[19](有限時間鎮(zhèn)定) 設(shè) μk=Kixk,系統(tǒng)(1)關(guān)于(c1,c2,L,d)有限時間鎮(zhèn)定,如果滿足條件(3)的擾動dk,均應(yīng)滿足條件(5)。
引理 1[20]給定兩個反饋矩陣 Ki,F(xiàn)i∈Rm×n,對于 x∈Rn,如果 x∈ψ(Fi),則

引理 2[21]設(shè) P∈Rm×m為正定對稱陣,矩陣 φi∈

代入控制器(4),通過引理1對執(zhí)行器飽和進行分解,得到如下閉環(huán)系統(tǒng):

2 主要結(jié)論
2.1 有限時間鎮(zhèn)定(FTS)分析
定理1 考慮離散閉環(huán)系統(tǒng)(8)是基于(c1,c2,L,d)有限時間鎮(zhèn)定的,如果存在常數(shù)μ≥1,σ1,σ2>0依賴模態(tài)的正定對稱矩陣Xi∈Rn×n,受限于模態(tài)的矩陣Yi∈Rm×n,正定對稱矩陣 Q∈Rn×n和 Fi∈Rm×n,使得下述條件成立:
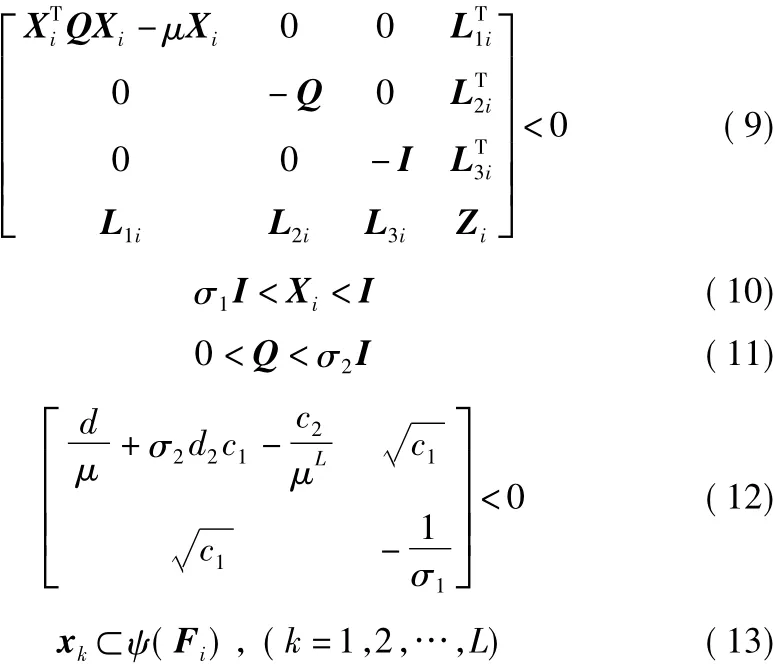
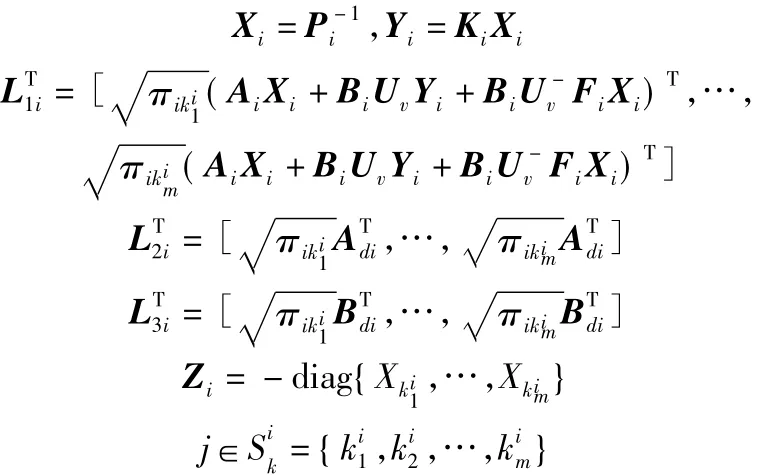
其中:
證明 構(gòu)造隨機Markov切換的Lyapunov函數(shù):
則
考慮到系統(tǒng)(1)中含部分轉(zhuǎn)移概率未知的情況,根據(jù)轉(zhuǎn)移概率矩陣的相關(guān)性質(zhì),可以得到如下條件:
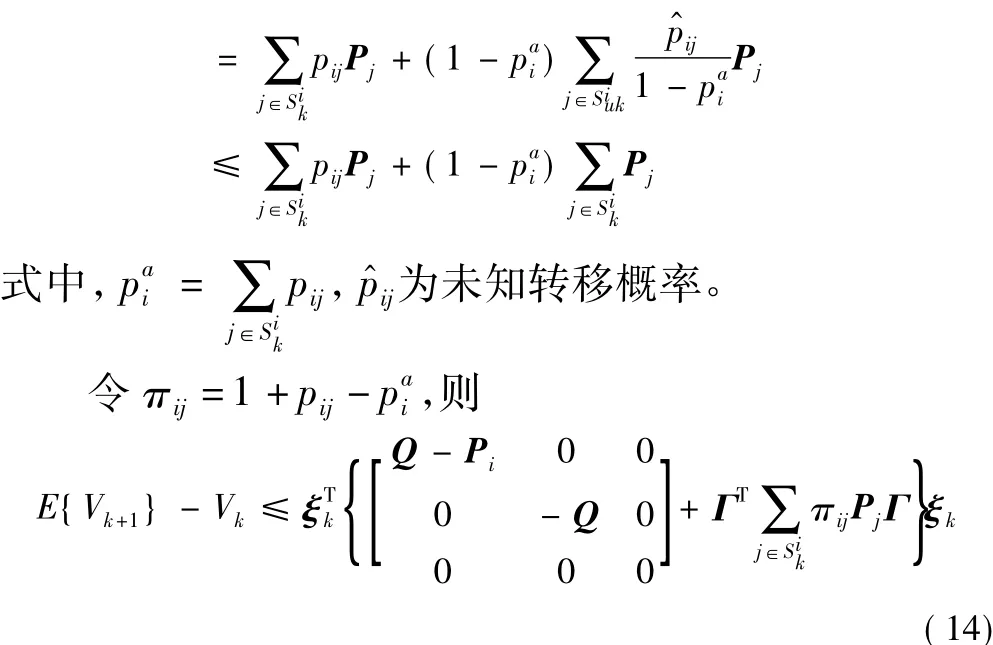
假設(shè):

根據(jù)不等式(15),可得如下結(jié)果:
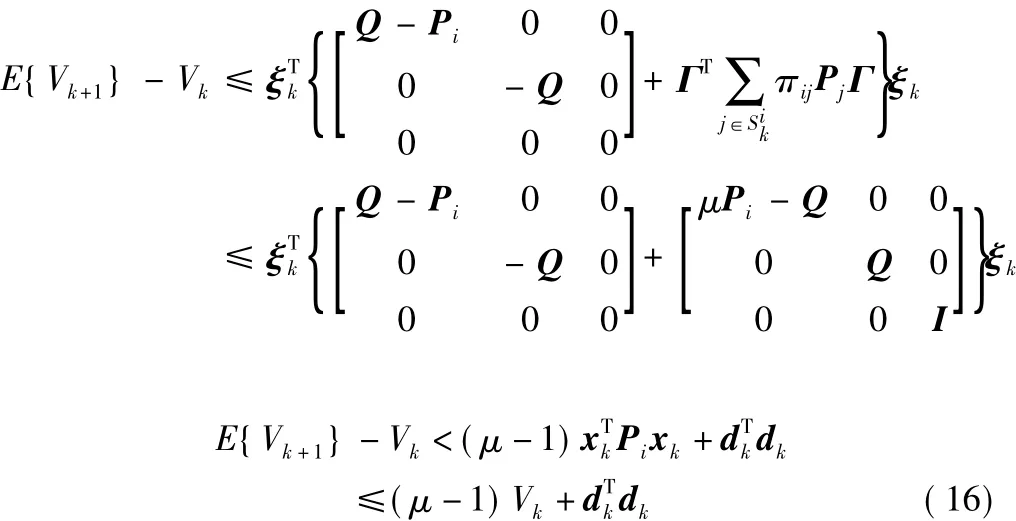
即

通過矩陣遞推法,可知:

考慮任意的 k∈{1,2,…,L}和條件(3),下列不等式成立:

由定義1,進一步可得

式中,σP=σmax(Pi),σQ=σmax(Q),固定時滯滿足0<τ≤d2。
將不等式(19)代入式(18),可推導(dǎo)出:

另外,對于任意的i∈S,有

式中,σp=σmin(Pi)。
根據(jù)條件(20)和條件(21),有

對條件(12)運用舒爾補引理,并根據(jù)條件(10)和條件(11)可得:
由(22)可推導(dǎo)出:

將不等式(23)代入上述不等式中,可得

因此,系統(tǒng)狀態(tài)響應(yīng)是有限時間鎮(zhèn)定的。當(dāng)狀態(tài)向量xk滿足條件(13),保證了反饋控制作用在線性的有界區(qū)域。
證畢。
注記1:下面將證明不等式(15)與條件(9)等價。
首先,令 Ai,v=Ai+BiUvKi+BiU-vFi,應(yīng)用引理2,將式(14)化簡為

由此,將不等式(15)進行展開,可得

對于?v∈{1,2,…,2m}恒成立。
將式(24)兩邊同時左乘,右乘diag{P-1i,I,I},并取Xi=P-1i,Yi=KiXi,迭代運算即可得證條件(9)。
2.2 狀態(tài)反饋控制器設(shè)計
當(dāng)μ確定時,不等式(9),式(13)是線性矩陣不等式,可通過LMIs進行求解。將FTS控制器的設(shè)計問題轉(zhuǎn)化為下述優(yōu)化問題:
式中,fiq為Fi的第q行。
下面將上述優(yōu)化問題轉(zhuǎn)化為LMIs問題。
令Vi=XTiQXi,Hi=FiXi,并確定 μ 的值,將不等式(9)、式(12)轉(zhuǎn)化為關(guān)于 Hi,Xi,Yi,Vi的線性矩陣不等式。

應(yīng)用Schur補引理,可得到
上述不等式同時左乘,右乘diag{Xi,I},可得

式中,hiq為Hi的第q行。
當(dāng)σ1為固定值時,不等式(25)為線性矩陣不等式。
綜上所述,通過確定 μ,c1,σ1的值,可得到帶LMIs約束的優(yōu)化問題:
注記2:考慮上述優(yōu)化問題有可行解,系統(tǒng)為有限時間鎮(zhèn)定,其控制器為Ki=YiX-1i,且c2越大,有限時間鎮(zhèn)定的可控邊界范圍越大。
3 數(shù)值示例
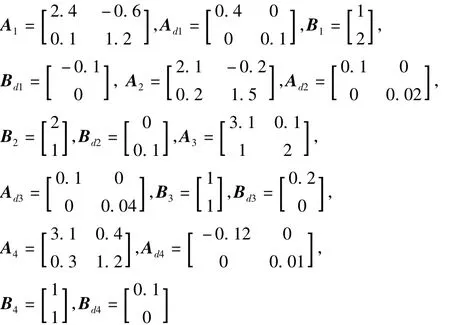
考慮離散Markov跳變系統(tǒng)(8)具有兩個模態(tài),參數(shù)為
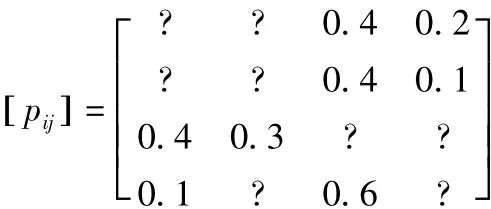
轉(zhuǎn)移概率矩陣如下:
令 c1=8,σ1=0.01,T=50,μ =1。
通過求解LMIs約束的優(yōu)化問題(26)可得(c2)min=17.042,對應(yīng)的FTS控制器為圖3 xTkxk軌跡
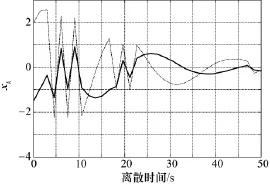
圖2 狀態(tài)軌跡

從圖1~圖3可知所求得的狀態(tài)反饋控制器K1、K2使得初始狀態(tài)為xT0=[-1.5 2]的系統(tǒng),在反饋控制器的作用下,實現(xiàn)了有限時間鎮(zhèn)定。
4 結(jié)束語
本文研究了含未知但有界擾動,部分轉(zhuǎn)移概率未知和執(zhí)行器飽和的時滯Markov跳變系統(tǒng)的有界時間穩(wěn)定性問題,推導(dǎo)了系統(tǒng)有界時間鎮(zhèn)定的充分條件,并通過將優(yōu)化問題轉(zhuǎn)化為線性矩陣不等式的方法,求解了相應(yīng)狀態(tài)反饋控制器的增益。仿真示例有效表明了該方法設(shè)計的反饋控制器能在滿足既定條件下,實現(xiàn)系統(tǒng)的有限時間穩(wěn)定的指標。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學(xué)學(xué)報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
科技傳播(2019年22期)2020-01-14 03:06:54
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
民用飛機設(shè)計與研究(2019年4期)2019-05-21 07:21:24
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
