基于視頻的前車并線及碰撞預(yù)警算法研究
2019-10-18 07:26:04趙富強(qiáng)王智靈梁華為
測(cè)控技術(shù) 2019年9期
關(guān)鍵詞:檢測(cè)
趙富強(qiáng),孔 斌,楊 靜,王智靈,梁華為
(1.中國科學(xué)院合肥智能機(jī)械研究所,安徽合肥 230031;2.中國科學(xué)技術(shù)大學(xué),安徽合肥 230026;3.中國科學(xué)院合肥研究院應(yīng)用技術(shù)研究所,安徽合肥 230088;4.安徽省智能駕駛技術(shù)及應(yīng)用工程實(shí)驗(yàn)室,安徽合肥 230088)
隨著社會(huì)經(jīng)濟(jì)的發(fā)展,人們生活水平不斷提高,汽 車和駕駛員數(shù)量增長迅速,平均每年增長率是上一年的10%,每年增加超過千萬輛汽車,汽車給人們帶來便利的同時(shí),也不可避免地帶來了巨大的交通安全問題,在交通事故中,追尾事故占較大比重[1]。
駕駛安全問題是汽車產(chǎn)業(yè)亟待解決的關(guān)鍵性問題。近年來,知名車企將安全輔助駕駛系統(tǒng)納入標(biāo)配,盡可能保證駕駛員的安全[2]。安全輔助駕駛系統(tǒng)主要分為車道線偏離預(yù)警、前車碰撞預(yù)警和疲勞駕駛監(jiān)測(cè)等 ,綜合各方面信息,提醒駕駛員安全駕駛,該系統(tǒng)依賴于安裝在車輛內(nèi)或外部的相機(jī),獲取交通環(huán)境下的視頻數(shù)據(jù),利用計(jì)算機(jī)視覺方法,如目標(biāo)檢測(cè)、目標(biāo)跟蹤、區(qū)域分割等,計(jì)算目標(biāo)位置和軌跡等信息,通過一定策略綜合處理該信息,按照潛在危險(xiǎn)的重要程度,輸出預(yù)警信號(hào)[4]。但目前已有的輔助駕駛系統(tǒng)存在諸多問題:誤警率較高,影響駕駛員,從而導(dǎo)致駕駛員關(guān)閉輔助駕駛系統(tǒng),輔助駕駛系統(tǒng)形同虛設(shè);嵌入式平臺(tái)對(duì)視頻數(shù)據(jù)的處理速度難以滿足預(yù)警系統(tǒng)對(duì)實(shí)時(shí)性的要求;在不同的駕駛場(chǎng)景下,光照強(qiáng)度的變化導(dǎo)致車載相機(jī)成像質(zhì)量變差,影響對(duì)圖像的處理。近年來,隨著計(jì)算機(jī)視覺的發(fā)展,目標(biāo)檢測(cè)和目標(biāo)跟蹤算法的準(zhǔn)確率和實(shí)時(shí)性有了大幅度提高[5],同時(shí),隨著嵌入式GPU的興起,對(duì)圖像的處理速度可以滿足預(yù)警系統(tǒng)對(duì)實(shí)時(shí)性的要求,目標(biāo)檢測(cè)和目標(biāo)跟蹤算法可以應(yīng)用于安全輔助駕駛系統(tǒng)。
現(xiàn)實(shí)場(chǎng)景中,當(dāng)前車并線時(shí),前車和本車的駕駛員均無法在短時(shí)間內(nèi),判斷兩車是否保持安全的距離和速度,從而導(dǎo)致嚴(yán)重的交通事故。本文開創(chuàng)性地提出了前車并線預(yù)警策略,可以在前車有并線意圖的情況下,提醒本車駕駛員及時(shí)減速避讓。目前已有的前碰撞預(yù)警系統(tǒng)的原理是對(duì)前方靜態(tài)目標(biāo)障礙物的預(yù)警,主要關(guān)注前方目標(biāo)的靜態(tài)特點(diǎn),并未考慮當(dāng)前車輛與前方車輛之間的相對(duì)運(yùn)動(dòng)趨勢(shì)。本文利用目標(biāo)跟蹤算法跟蹤前方車輛,記錄前車的位置和軌跡等信息,分析前車的運(yùn)動(dòng)趨勢(shì),實(shí)現(xiàn)前車并線預(yù)警功能。
1 前碰撞預(yù)警算法整體流程
前碰撞預(yù)警算法由目標(biāo)檢測(cè)、目標(biāo)跟蹤、標(biāo)定測(cè)距以及預(yù)警策略模塊組成,算法的整體流程如圖1所示。通過車載相機(jī)獲取路況圖像,對(duì)圖像進(jìn)行預(yù)處理,利用目標(biāo)檢測(cè)算法檢測(cè)圖像中的目標(biāo)車輛,如果檢測(cè)到前方特定區(qū)域有目標(biāo)車輛出現(xiàn),切換到目標(biāo)跟蹤模塊,跟蹤后續(xù)圖像中的目標(biāo),如果跟蹤結(jié)果的最大置信度小于設(shè)定閾值,則說明目標(biāo)消失或發(fā)生較大的外觀變化,重新切換到目標(biāo)檢測(cè)模塊。跟蹤模塊輸出目標(biāo)矩形框,并記錄軌跡信息。通過標(biāo)定測(cè)距模塊測(cè)量當(dāng)前車輛與前方目標(biāo)車輛的距離[6]。預(yù)警策略模塊融合距離、軌跡等信息,實(shí)現(xiàn)預(yù)警。
2 算法模塊設(shè)計(jì)
2.1 交通場(chǎng)景下目標(biāo)車輛檢測(cè)模塊
2.1.1 檢測(cè)算法介紹
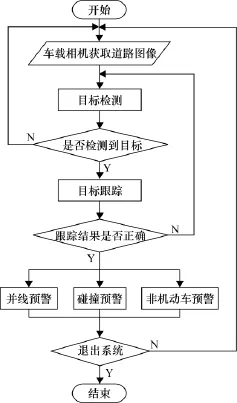
圖1 前碰撞預(yù)警系統(tǒng)功能流程圖
利用目標(biāo)檢測(cè)算法,獲得圖像中的目標(biāo)車輛的位置。本文根據(jù)交通環(huán)境下車輛的特點(diǎn):目標(biāo)的尺寸通常變化不大,因此,本文對(duì)Yolov3卷積神經(jīng)網(wǎng)絡(luò)檢測(cè)算法進(jìn)行剪枝處理[7];對(duì)檢測(cè)錨框的尺寸進(jìn)行調(diào)整,如表1所示,第1列表示兩個(gè)輸出層分別負(fù)責(zé)檢測(cè)的目標(biāo)尺度,第1行表示每個(gè)輸出層對(duì)應(yīng)的檢測(cè)錨框的3種大小,近似正方形錨框主要用于預(yù)測(cè)機(jī)動(dòng)車等目標(biāo),瘦高的長方形錨框用于預(yù)測(cè)非機(jī)動(dòng)車等目標(biāo)。

表1 輸出層的目標(biāo)尺寸 單位:像素
2.1.2 算法的具體工作流程
利用已標(biāo)注的交通場(chǎng)景圖像樣本數(shù)據(jù)集,對(duì)目標(biāo)檢測(cè)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,完成每輪訓(xùn)練后,求解網(wǎng)絡(luò)輸出結(jié)果的損失,當(dāng)損失小于一定閾值,或訓(xùn)練迭代到設(shè)定的次數(shù)后,保存權(quán)重參數(shù)并結(jié)束訓(xùn)練。在檢測(cè)階段,將輸入圖像輸入到檢測(cè)網(wǎng)絡(luò),與訓(xùn)練好的權(quán)重參數(shù)進(jìn)行運(yùn)算,輸出目標(biāo)的位置矩形框[8]。具體流程如圖2所示,上面的圖像集合表示訓(xùn)練集,通過深度學(xué)習(xí)方法訓(xùn)練權(quán)重參數(shù),左邊的圖像表示測(cè)試圖像,通過與網(wǎng)絡(luò)的權(quán)重參數(shù)運(yùn)算,輸出目標(biāo)檢測(cè)框,如右邊的圖像中紅色矩形框所示。
2.1.3 剪枝后的卷積神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
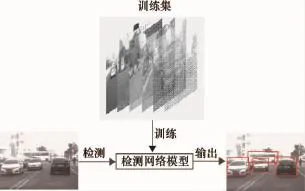
圖2 目標(biāo)檢測(cè)算法流程圖
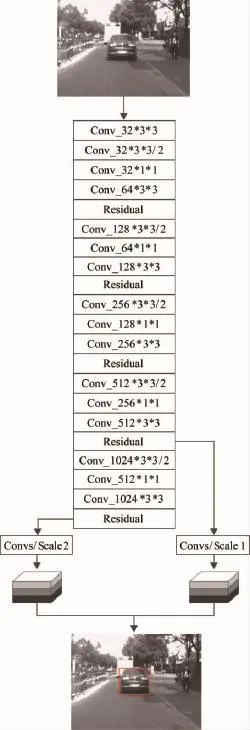
圖3 剪枝后的卷積神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
剪枝后的Yolov3卷積神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)如圖3所示,圖中最上面的圖像表示輸入圖像,依次與網(wǎng)絡(luò)中各層運(yùn)算,得到特征矩陣;從網(wǎng)絡(luò)的不同層引出特征矩陣,經(jīng)過幾層卷積層融合后,到達(dá)輸出層,分別檢測(cè)不同大小的目標(biāo),如圖中Convs/Scale1和Convs/Scale2所示,最下面的圖像中紅色矩形框表示目標(biāo)的位置。每個(gè)輸出層對(duì)應(yīng)3種錨框,因此,輸出層矩特征矩陣按通道分成3個(gè)部分,每個(gè)部分分別由矩形框(x,y,w,h)和置信度Conf組成。輸出層Scale1充分保留了圖像的細(xì)節(jié)信息,負(fù)責(zé)檢測(cè)中小目標(biāo),輸出層Scale2保存較多的語義信息,負(fù)責(zé)檢測(cè)大目標(biāo)。按照置信度對(duì)檢測(cè)結(jié)果進(jìn)行排序,選擇置信度大于0.9對(duì)應(yīng)的目標(biāo)矩形框,作為最終網(wǎng)絡(luò)的檢測(cè)結(jié)果。
2.1.4 檢測(cè)算法的損失函數(shù)
檢測(cè)算法的損失函數(shù)由定位損失、分類損失和置信度損失組成[9]。
Locloss1表示目標(biāo)中心位置損失,由目標(biāo)框中心坐標(biāo)的均方誤差組成。

Locloss2表示目標(biāo)矩形框的長寬損失,由目標(biāo)框的長寬的平方根誤差平方組成,一定程度上弱化較大尺寸的目標(biāo)框損失對(duì)整體損失函數(shù)貢獻(xiàn)。

式中,S2表示輸出層的錨點(diǎn)數(shù);B表示每個(gè)錨點(diǎn)對(duì)應(yīng)的示預(yù)測(cè)目標(biāo)的矩形框參數(shù),分別對(duì)應(yīng)中心坐標(biāo)和長寬;x^i、y^i、w^i、h^i表示標(biāo)注目標(biāo)的矩形框參數(shù)。
分類損失用于計(jì)算預(yù)測(cè)類別與真實(shí)類別的誤差,由目標(biāo)類別誤差和背景類別誤差組成。
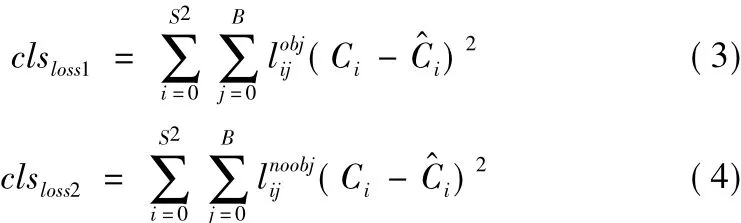
式中,Ci表示預(yù)測(cè)標(biāo)簽示真實(shí)標(biāo)簽;lnoobjij表示第i個(gè)錨點(diǎn)對(duì)應(yīng)的第j個(gè)檢測(cè)框是否有目標(biāo),如果有,則
置信度損失用于計(jì)算分類置信度對(duì)損失的貢獻(xiàn)。置信度越小,對(duì)整體損失的貢獻(xiàn)程度越大,反之亦然。

式中,pi(c)表示第i個(gè)錨點(diǎn)中第c類的預(yù)測(cè)置信度;p^i(c)表示第i個(gè)錨點(diǎn)中第c類的真值置信度;
由于各部分損失對(duì)損失函數(shù)的貢獻(xiàn)程度不同,通過加權(quán)的方式,綜合各部分損失函數(shù),得到總體損失函數(shù)。

式中,λcoord表示位置誤差的權(quán)重;λnoobj表示非目標(biāo)類別誤差權(quán)重。
2.2 基于路面紋理上下文的自適應(yīng)尺度目標(biāo)跟蹤算法
基于路面紋理上下文的自適應(yīng)尺度目標(biāo)跟蹤算法是前車碰撞預(yù)警算法的關(guān)鍵部分,主要用于跟蹤目標(biāo)車輛,記錄前車運(yùn)動(dòng)軌跡。核相關(guān)濾波算法屬于辨別式跟蹤算法,在第一幀中的目標(biāo)周圍區(qū)域,采用在x和y方向上循環(huán)位移的方式采集樣本,計(jì)算樣本的HOG特征矩陣,根據(jù)循環(huán)矩陣的性質(zhì),可通過傅里葉變換在頻域進(jìn)行運(yùn)算,從而加快了在線訓(xùn)練和跟蹤的速度[10]。但由于其固有的缺陷,如:當(dāng)連續(xù)幀間的目標(biāo)尺度變化較大時(shí),跟蹤框往往無法準(zhǔn)確跟蹤前方目標(biāo)車輛。本文從自適應(yīng)尺度和道路紋理上下文信息融合等方面,解決原有算法存在的缺陷。
2.2.1 核相關(guān)濾波基本理論
基于核相關(guān)濾波的目標(biāo)跟蹤算法是辨別式跟蹤算法,該算法利用樣本集,在線學(xué)習(xí)一個(gè)可辨別的相關(guān)濾波器,用于區(qū)分下一幀中特定區(qū)域內(nèi)目標(biāo)的位置。傳統(tǒng)的采樣策略是在目標(biāo)周圍區(qū)域隨機(jī)剪切樣本,得到正負(fù)樣本集,而核相關(guān)濾波算法采用循環(huán)位移的方法[11],在目標(biāo)區(qū)域周圍進(jìn)行密集采樣,計(jì)算樣本的HOG特征矩陣,整個(gè)樣本空間的特征矩陣組成的矩陣是循環(huán)矩陣。通過二維高斯函數(shù)產(chǎn)生樣本標(biāo)簽,靠近樣本空間的中央位置,標(biāo)簽值較大,反之亦然,標(biāo)簽值的大小表示目標(biāo)的置信度。如圖4所示,下層表示經(jīng)過循環(huán)移位后的樣本空間中的樣本分布圖,上層表示樣本空間中的樣本對(duì)應(yīng)的標(biāo)簽值,靠近中間位置呈橘黃色,表示標(biāo)簽值較大,遠(yuǎn)離中間位置呈藍(lán)色,表示標(biāo)簽值較小。
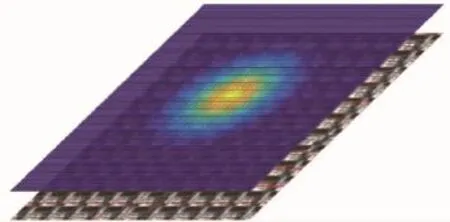
圖4 循環(huán)樣本空間與標(biāo)簽對(duì)應(yīng)關(guān)系
在利用脊回歸算法訓(xùn)練過程中,根據(jù)循環(huán)矩陣的性質(zhì),在頻域中減少計(jì)算量,有效提高算法的實(shí)時(shí)性。脊回歸算法如式(7)所示。

式中,A0為樣本集特征矩陣;w為可學(xué)習(xí)相關(guān)濾波器的權(quán)重參數(shù)矩陣;y為樣本集的標(biāo)簽矩陣;λ1為正則項(xiàng)參數(shù)。
對(duì)式(7)求導(dǎo),并令導(dǎo)數(shù)為0,求解w的矩陣形式如式(8)所示;根據(jù)循環(huán)矩陣的性質(zhì),時(shí)域中的循環(huán)矩陣X可用頻域中的對(duì)角陣表示,如式(9)所示;根據(jù)式(8)和式(9),可得到頻域中的權(quán)重參數(shù)矩陣,如式(10)所示。
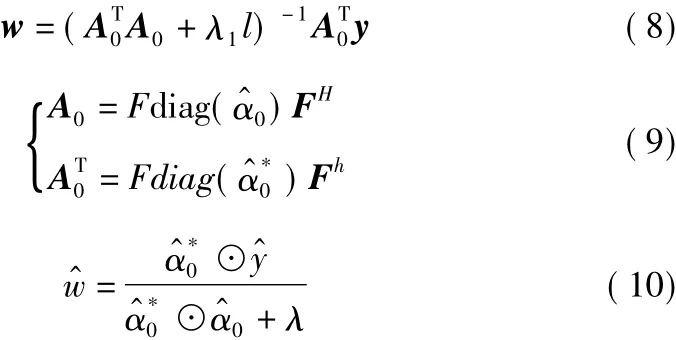
式中,F(xiàn)為傅里葉變換矩陣;AT為樣本集特征矩陣的0共軛轉(zhuǎn)置;α^0為循環(huán)特征矩陣A0的第一行向量組成的對(duì)角矩陣的傅里葉變換;α^0*為循環(huán)特征矩陣A0T的第一行向量組成的對(duì)角矩陣的傅里葉變換。
目標(biāo)跟蹤階段,將下一幀圖像中的搜索區(qū)域的特征組成的循環(huán)矩陣Z與權(quán)重參數(shù)矩陣w運(yùn)算后,得到的響應(yīng)矩陣R中最大的響應(yīng)值對(duì)應(yīng)的位置,是圖像中目標(biāo)的中心位置,如式(11)所示。

2.2.2 融合路面紋理上下文信息的跟蹤方法
傳統(tǒng)的核相關(guān)濾波器僅僅利用單一的目標(biāo)信息作為跟蹤標(biāo)準(zhǔn),無法有效利用空間上下文信息,而空間上下文信息對(duì)預(yù)測(cè)目標(biāo)位置具有重要意義[12]。在交通場(chǎng)景下,圖像中的待跟蹤目標(biāo)車輛在路面上方行駛,且在行駛過程中,前后兩幀的路面紋理相對(duì)穩(wěn)定。如圖5所示,圖中藍(lán)色矩形框表示路面紋理區(qū)域,紅色矩形框表示目標(biāo)車輛。可以與傳統(tǒng)的核相關(guān)濾波算法融合,輔助跟蹤目標(biāo)車輛。

圖5 道路場(chǎng)景下路面紋理與目標(biāo)的位置關(guān)系
融合道路紋理信息的核相關(guān)濾波方法可有效解決目標(biāo)部分遮擋的跟蹤問題。如果遇到目標(biāo)車輛部分遮擋,導(dǎo)致目標(biāo)區(qū)域的響應(yīng)值非最大響應(yīng)值,融合路面紋理信息后,仍然可準(zhǔn)確跟蹤目標(biāo)。融合路面紋理上下文信息的脊回歸訓(xùn)練公式如式(12)所示。

式中,λ2為權(quán)衡路面上下文信息對(duì)響應(yīng)值的影響程度參數(shù);A1為路面區(qū)域的循環(huán)樣本特征矩陣。
2.2.3 尺度自適應(yīng)跟蹤模型
在交通場(chǎng)景下的車輛跟蹤過程中,由于前車和當(dāng)前車輛的相對(duì)速度變化,導(dǎo)致圖像中的目標(biāo)車輛的尺度發(fā)生變化,傳統(tǒng)的核相關(guān)濾波方法無法適應(yīng)目標(biāo)車輛變化較大的情況。本文在傳統(tǒng)的核相關(guān)濾波的基礎(chǔ)上,增加尺度自適應(yīng)跟蹤模型。
采用圖像金字塔或?yàn)V波器金字塔模型處理與尺度相關(guān)的問題,通過一定尺度間隔采樣不同尺度的圖像[13],但該方法的計(jì)算量急劇增大,不利于預(yù)警算法對(duì)實(shí)時(shí)性的要求。本文根據(jù)交通場(chǎng)景下目標(biāo)跟蹤尺度變化的特點(diǎn),增加一個(gè)維度處理目標(biāo)尺度變化,如圖6所示,圖中左邊的圖像表示上一幀中用來在線訓(xùn)練位移濾波器w和尺度濾波器w1的樣本,通過以像素為單位進(jìn)行循環(huán)移位,得到循環(huán)樣本空間,計(jì)算樣本的HOG特征,與二維高斯標(biāo)簽矩陣結(jié)合,利用脊回歸算法訓(xùn)練,得到位移濾波器w;以目標(biāo)中心位置為中心,以一定的間隔采集不同尺度的樣本,并計(jì)算樣本的HOG特征,與一維高斯標(biāo)簽結(jié)合,通過脊回歸算法訓(xùn)練,得到尺度濾波器w1;當(dāng)獲取到當(dāng)前幀圖像后,首先,通過位移濾波器w與輸入圖像的特征矩陣運(yùn)算后,得到當(dāng)前幀目標(biāo)中心位置的坐標(biāo),然后,利用尺度濾波器計(jì)算當(dāng)前幀目標(biāo)的最優(yōu)尺度,最終輸出目標(biāo)的位置和大小,如圖中右下角圖像中紅色虛線框所示。
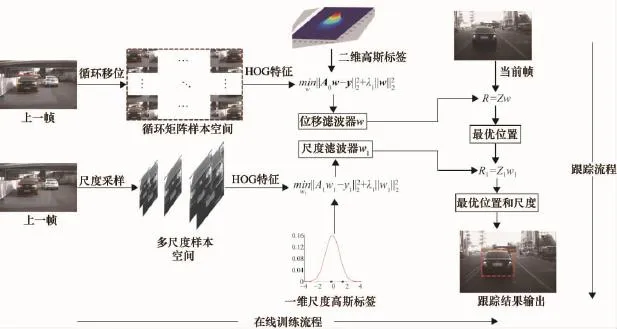
圖6 自適應(yīng)尺度跟蹤算法的在線訓(xùn)練和檢測(cè)流程
2.2.4 目標(biāo)檢測(cè)和目標(biāo)跟蹤切換策略
在復(fù)雜多變的交通場(chǎng)景中,正在跟蹤的前方目標(biāo)易出現(xiàn)運(yùn)動(dòng)模糊、遮擋及截?cái)嗟那闆r,導(dǎo)致跟蹤算法對(duì)目標(biāo)跟蹤失敗,本文設(shè)計(jì)了一個(gè)目標(biāo)檢測(cè)和跟蹤模塊的切換時(shí)機(jī)的方法,當(dāng)跟蹤模塊對(duì)目標(biāo)跟蹤失敗后,及時(shí)切換到目標(biāo)檢測(cè)模塊,重新檢測(cè)目標(biāo)[14]。
根據(jù)核相關(guān)濾波跟蹤算法的輸出結(jié)果的最大響應(yīng)值的含義,當(dāng)準(zhǔn)確跟蹤到下一幀目標(biāo)時(shí),響應(yīng)矩陣的最大值接近于1,反之,接近于0。根據(jù)該特點(diǎn),設(shè)定切換閾值β,如圖7所示,當(dāng)0<β<0.7時(shí),表示跟蹤模塊無法有效跟蹤目標(biāo),切換到檢測(cè)模塊,重新檢測(cè)目標(biāo);當(dāng)β>0.7時(shí),表示跟蹤模塊仍然能夠準(zhǔn)確跟蹤目標(biāo);當(dāng)檢測(cè)模塊檢測(cè)到有效目標(biāo)時(shí),切換到跟蹤模塊對(duì)目標(biāo)進(jìn)行持續(xù)跟蹤。
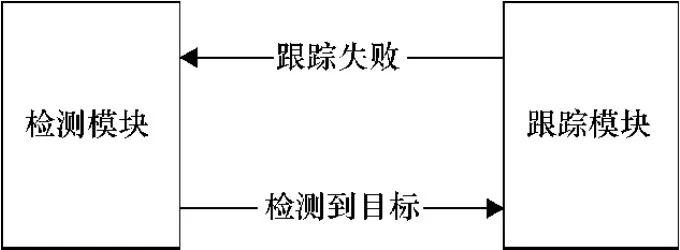
圖7 目標(biāo)檢測(cè)和跟蹤模塊切換流程
2.3 車載相機(jī)標(biāo)定測(cè)距
通過測(cè)距模塊實(shí)現(xiàn)測(cè)量當(dāng)前車輛和前方目標(biāo)的距離的功能。目前常用的測(cè)距方法有超聲波測(cè)距、毫米波測(cè)距、攝像機(jī)標(biāo)定測(cè)距和激光測(cè)距等[15]。利用單目相機(jī)的成像原理,通過鏡頭將物體的反射光進(jìn)行折射后,在攝像機(jī)的感光屏上成像[16]。車載相機(jī)的坐標(biāo)空間由4個(gè)相互關(guān)聯(lián)的坐標(biāo)系組成,如圖8所示。其中,OW-XWYWZW表示世界坐標(biāo)系,O-XYZ表示攝像機(jī)坐標(biāo)系,o1-xy表示成像坐標(biāo)系,o2-uv表示圖像坐標(biāo)系,紅色的“×”表示世界坐標(biāo)空間中的點(diǎn)MW和攝像機(jī)坐標(biāo)系中的點(diǎn)M的位置坐標(biāo),藍(lán)色的“×”表示圖像坐標(biāo)空間中的點(diǎn)m的位置坐標(biāo)。根據(jù)式(13),實(shí)現(xiàn)圖像坐標(biāo)空間的點(diǎn)m與世界坐標(biāo)空間中的點(diǎn)MW的一一映射關(guān)系。
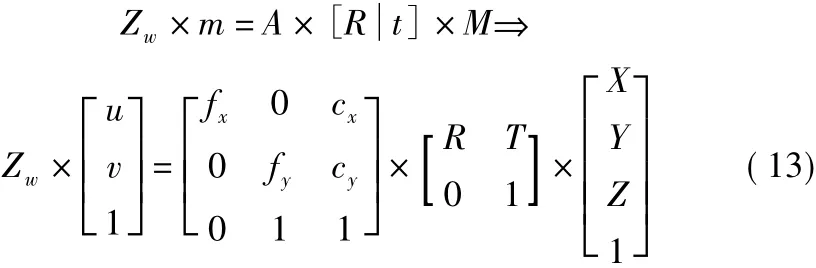
式中,A為攝像機(jī)的內(nèi)部參數(shù);fx為x方向以像素為單位的焦距;fy為y方向以像素為單位的焦距;cx為圖像中心對(duì)應(yīng)的x方向的索引;cy為圖像中心對(duì)應(yīng)的y方
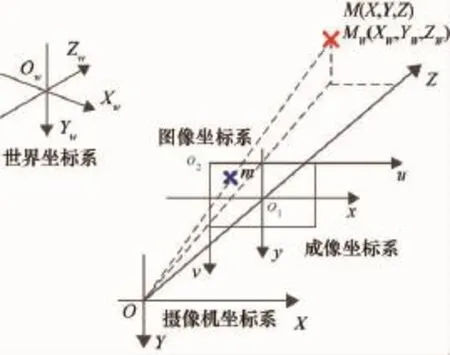
圖8 坐標(biāo)空間的對(duì)應(yīng)關(guān)系圖
2.4 預(yù)警策略
在目標(biāo)檢測(cè)和跟蹤基礎(chǔ)上,利用圖9所示的流程實(shí)現(xiàn)檢測(cè)和跟蹤模塊之間數(shù)據(jù)傳遞的有效性。具體流程如下。
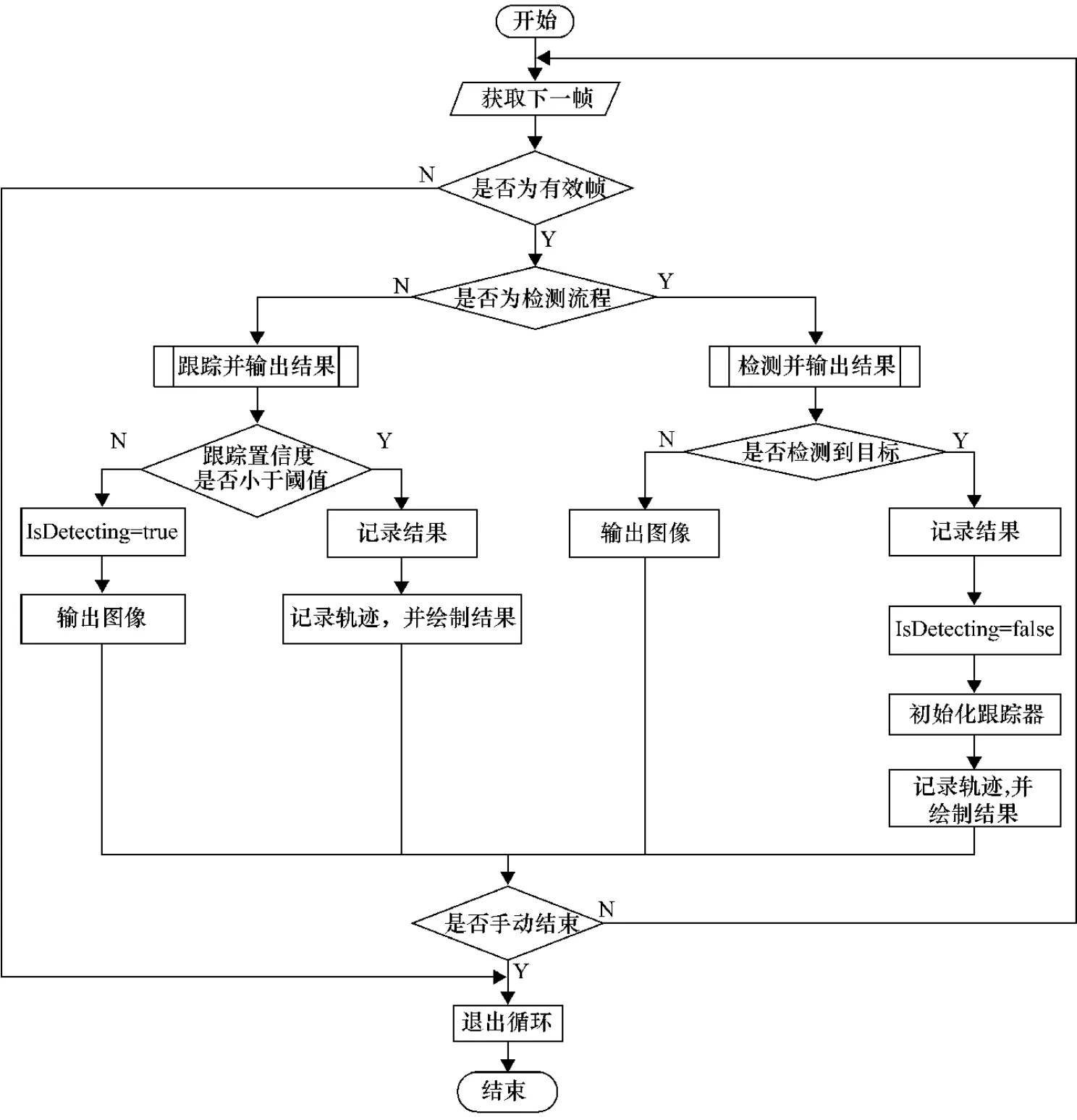
圖9 目標(biāo)檢測(cè)與跟蹤算法的數(shù)據(jù)傳遞流程圖
(1)預(yù)警系統(tǒng)啟動(dòng)后,獲取視頻數(shù)據(jù)的第一幀,首先,判斷獲取的幀是否有效,如果無效,則退出。否則,進(jìn)入檢測(cè)流程,檢測(cè)并輸出所有的檢測(cè)結(jié)果,如果未檢測(cè)到有效目標(biāo),則繼續(xù)檢測(cè)下一幀,否則,將目標(biāo)位置信息記錄下來,并將檢測(cè)標(biāo)志IsDetecting置false,最后,初始化目標(biāo)跟蹤模塊,輸出目標(biāo)位置。
(2)當(dāng)下一幀到來時(shí),進(jìn)入跟蹤流程,跟蹤目標(biāo)并輸出結(jié)果,如果跟蹤結(jié)果的置信度小于閾值,則認(rèn)為跟蹤失敗,則將檢測(cè)標(biāo)志IsDetecting置true,否則,更新目標(biāo)跟蹤模塊,輸出目標(biāo)位置。
2.4.1 碰撞時(shí)間預(yù)警
采用車載相機(jī)標(biāo)定的方法,可以計(jì)算當(dāng)前車輛和前車的實(shí)際距離,同時(shí)還需要獲得兩車的相對(duì)速度,綜合兩個(gè)指標(biāo)得出碰撞時(shí)間(Time of Collision,TTC)[17]。如圖10所示,A車表示當(dāng)前車輛,B車表示與A車同一車道的前方目標(biāo)車輛,A車和B車之間的連線表示兩車的碰撞時(shí)間。當(dāng)駕駛員在2.5 s以上發(fā)現(xiàn)危險(xiǎn)時(shí),并采取制動(dòng)措施,可以避免與前車發(fā)生碰撞。
圖10 碰撞時(shí)間預(yù)警示意圖
利用兩車的相對(duì)距離d和相對(duì)速度v計(jì)算碰撞時(shí)間tTTC,由于無法直接測(cè)量前車的速度,為了降低成本,本車無法安裝測(cè)速儀器,因此,可以通過前后兩幀車距變化與連續(xù)兩幀之間的時(shí)間差得出兩車的相對(duì)速度,碰撞時(shí)間tTTC的計(jì)算方法如式(14)所示,以當(dāng)前車輛的行駛方向?yàn)檎较颍瑑绍嚨脑诘趖幀的相對(duì)速度由第t+1幀的距離dt+1與第t幀的距離dt之差與連續(xù)兩幀的時(shí)間間隔Δt決定,當(dāng)▽d<0時(shí),表示兩車的相對(duì)距離減小,當(dāng)▽d>0時(shí),表示兩車的相對(duì)距離增示輛車的相對(duì)速度越大,反之亦然。

根據(jù)碰撞時(shí)間tTTC的值,采取相應(yīng)的預(yù)警措施,如表2所示,當(dāng)tTTC的取值在(-∞,-2.5)范圍時(shí),預(yù)警級(jí)別為三級(jí),駕駛員可自主控制車輛,預(yù)警系統(tǒng)無需提示;當(dāng) tTTC的取值在(-2.5,-1.3]范圍時(shí),預(yù)警級(jí)別為二級(jí),預(yù)警系統(tǒng)發(fā)出聲音預(yù)警,提醒駕駛員安全駕駛;當(dāng)tTTC的取值在(-1.3,0]范圍時(shí),預(yù)警級(jí)別為一級(jí),預(yù)警系統(tǒng)發(fā)出聲音提示,并在一定程度上制動(dòng)車輛。
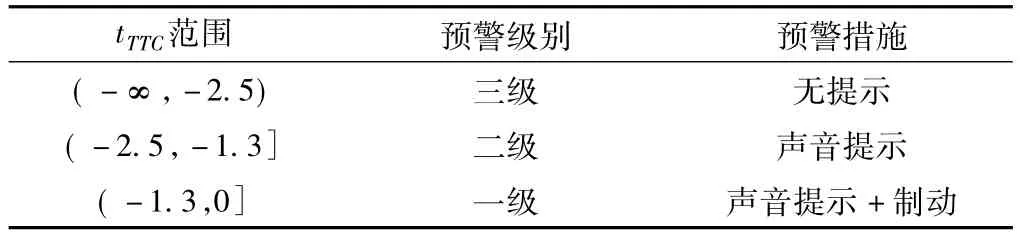
表2 碰撞時(shí)間與預(yù)警級(jí)別關(guān)系表
2.4.2 前車并線預(yù)警
如果前方車輛進(jìn)入當(dāng)前車道,駕駛員需要提前預(yù)判是否避讓,如果當(dāng)前車輛與前方車輛的相對(duì)速度較高,或前車以較大的速度和角度突然并線,駕駛員無法在短時(shí)間內(nèi)避讓,釀成車禍。本文結(jié)合前車運(yùn)動(dòng)軌跡,分析前車并線意圖,實(shí)現(xiàn)前車并線預(yù)警功能。
車載相機(jī)安裝在車輛頂部的中央位置,相機(jī)成像的中心點(diǎn)對(duì)應(yīng)于車輛正前方的中央位置,如圖11所示,圖中紅色柵格線表示當(dāng)前車輛安全行駛區(qū)域,該區(qū)域以當(dāng)前車輛中央向前方的延長線為中軸線,分別向左右兩邊擴(kuò)展的距離稱為擴(kuò)展距離,用d1表示,向前方延伸的距離稱為延伸距離,用d2表示。區(qū)域內(nèi)的每條紅色直線表示距離當(dāng)前車輛不同距離的位置,藍(lán)色實(shí)線表示該區(qū)域形成的三維空間的邊界,以當(dāng)前車輛兩側(cè)車道內(nèi)的目標(biāo)車輛的中心位置為目標(biāo)運(yùn)動(dòng)軌跡的錨點(diǎn),當(dāng)目標(biāo)錨點(diǎn)從紅色區(qū)域外部向區(qū)域內(nèi)部移動(dòng)時(shí),表示前方車輛有并線意圖,此時(shí),預(yù)警系統(tǒng)開始預(yù)警,提醒駕駛員減速避讓。擴(kuò)展距離d1和延伸距離d2的關(guān)系,如圖12所示,橫坐標(biāo)表示兩車的相對(duì)距離,單位為m,用distance表示,縱坐標(biāo)表示不同distance對(duì)應(yīng)的安全行駛區(qū)域在圖像中的寬度,單位為像素,用width表示,隨著兩車的相對(duì)距離的增加,width逐漸減小。

圖11 前車并線預(yù)警原理示意圖
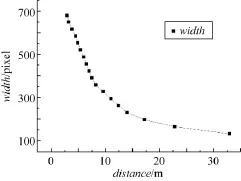
圖12 檢測(cè)寬度與車距關(guān)系折線圖
2.4.3 非機(jī)動(dòng)車預(yù)警
根據(jù)目標(biāo)車輛的類別,將目標(biāo)車輛分為機(jī)動(dòng)車和非機(jī)動(dòng)車。在交通場(chǎng)景中,非機(jī)動(dòng)車屬于運(yùn)動(dòng)狀態(tài)不穩(wěn)定的交通參與者,在駕駛過程中,容易出現(xiàn)突然停止、轉(zhuǎn)彎或摔倒等情況,機(jī)動(dòng)車駕駛員需要與非機(jī)動(dòng)車保持一定的距離,并隨時(shí)注意突發(fā)情況的發(fā)生。當(dāng)非機(jī)動(dòng)車出現(xiàn)在當(dāng)前車輛前方時(shí),預(yù)警算法及時(shí)預(yù)警,提醒駕駛員注意避讓非機(jī)動(dòng)車,謹(jǐn)慎駕駛。
3 結(jié)果與分析
本文的實(shí)驗(yàn)采用KITTI數(shù)據(jù)集和實(shí)際交通場(chǎng)景采集的樣本數(shù)據(jù)集。其中KITTI數(shù)據(jù)集由德國卡爾斯魯厄理工學(xué)院和豐田美國技術(shù)研究院聯(lián)合創(chuàng)辦,是目前世界上最大的無人駕駛場(chǎng)景數(shù)據(jù)集,該數(shù)據(jù)集包含目標(biāo)檢測(cè)、跟蹤、激光雷達(dá)及雙目視覺等圖像序列和標(biāo)注數(shù)據(jù)。如表3所示,KIITI數(shù)據(jù)集根據(jù)目標(biāo)的最小尺寸(Min_Box)、最大遮擋面積(Max_Occlusion)和最大截?cái)鄥^(qū)域(Max_Truncation),分為容易、中等和困難3個(gè)部分,分別評(píng)估算法在不同難度的數(shù)據(jù)集下的性能指標(biāo);在實(shí)際場(chǎng)景下采集的數(shù)據(jù)集包括高架道路、市區(qū)公路等交通場(chǎng)景。
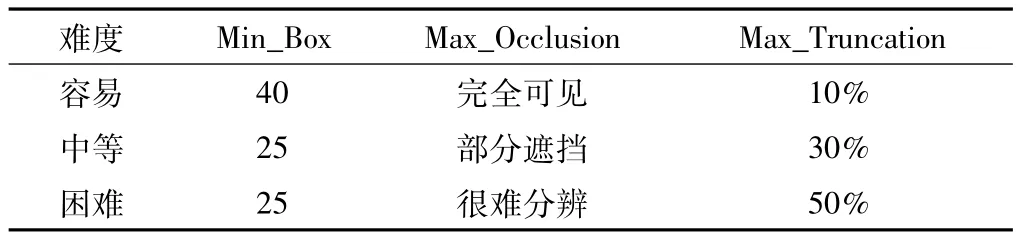
表3 KIITI數(shù)據(jù)集難易程度分布
3.1 標(biāo)定測(cè)距實(shí)驗(yàn)分析
通過車載相機(jī)與障礙物的實(shí)際距離和利用車載相機(jī)的標(biāo)定矩陣計(jì)算出來的距離,來分析標(biāo)定誤差。如表4所示,隨著相機(jī)與障礙物的距離的增加,誤差率有所增加,主要是因?yàn)榫嚯x相機(jī)越遠(yuǎn)的位置,單位像素所對(duì)應(yīng)世界坐標(biāo)空間中的距離越大,導(dǎo)致標(biāo)定誤差增大,但誤差在允許范圍內(nèi),滿足預(yù)警系統(tǒng)對(duì)誤差的要求。
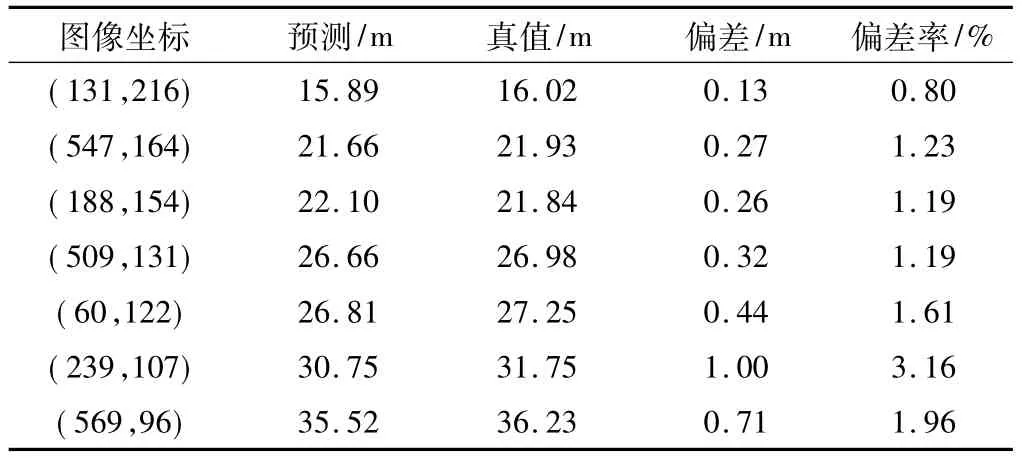
表4 車載相機(jī)標(biāo)定誤差統(tǒng)計(jì)
3.2 目標(biāo)跟蹤算法性能分析
利用KITTI數(shù)據(jù)集抽取包含單個(gè)目標(biāo)的數(shù)據(jù)集,并采用VOT評(píng)估工具箱,對(duì)比本文所述的跟蹤算法與已有的跟蹤算法之間的性能,結(jié)果如表5所示,Ms_Rcacf_6表示本文所述的算法在λ2=0.6時(shí)的算法,cacf_dsst表示未考慮路紋理上下文區(qū)域的多尺度跟蹤算法,cacf表示未考慮道路紋理上下文區(qū)域的單尺度跟蹤算法,kcf_dsst表示傳統(tǒng)的核相關(guān)濾波的多尺度跟蹤算法。分析實(shí)驗(yàn)數(shù)據(jù)可知,本文提出的算法的平均交并比和EAO(Expected Average Overlap)數(shù)據(jù)均排名第1,平均失敗次數(shù)排名第2,幀率FPS排名第3,綜合以上指標(biāo)分析,本文所述的算法在準(zhǔn)確率方面表現(xiàn)更好,在程序?qū)崿F(xiàn)中,可通過并行計(jì)算技術(shù)來彌補(bǔ)幀率較小的缺點(diǎn)。
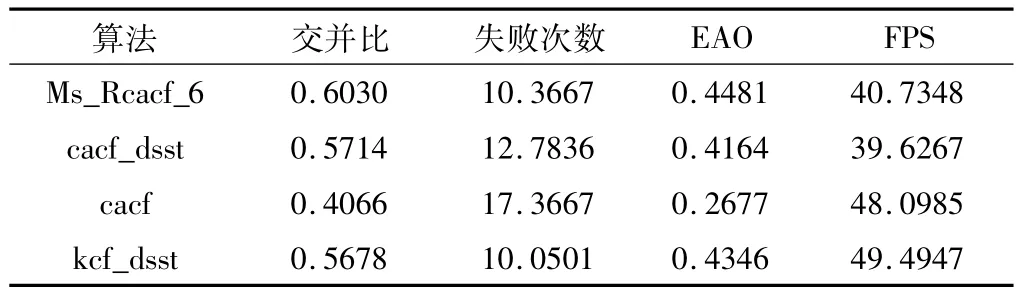
表5 目標(biāo)跟蹤算法性能指標(biāo)
3.3 碰撞時(shí)間預(yù)警實(shí)驗(yàn)分析
本實(shí)驗(yàn)將車載相機(jī)安裝在車輛頂部中央位置,對(duì)真實(shí)道路場(chǎng)景進(jìn)行采樣,并在離線場(chǎng)景下對(duì)算法進(jìn)行測(cè)試,實(shí)驗(yàn)結(jié)果如圖13所示,x軸表示兩車的相對(duì)距離;y軸表示兩車的相對(duì)速度;z軸表示碰撞時(shí)間TTC。當(dāng)碰撞時(shí)間在(-1.3,0]之間時(shí),進(jìn)行一級(jí)預(yù)警,如散點(diǎn)圖中紅色大號(hào)球點(diǎn)所示,當(dāng)碰撞時(shí)間在(-2.5,-1.3]之間時(shí),進(jìn)行二級(jí)預(yù)警,如散點(diǎn)圖中黃色中號(hào)球點(diǎn)所示,當(dāng)碰撞時(shí)間在(-∞,-2.5)之間時(shí),進(jìn)行三級(jí)預(yù)警,如散點(diǎn)圖中綠色小號(hào)球點(diǎn)所示。兩車的相對(duì)距離越小,相對(duì)速度為負(fù)數(shù),且絕對(duì)值越大時(shí),表示輛車在短時(shí)間碰撞,預(yù)警的緊急度越高,反之亦然。

圖13 預(yù)警時(shí)間與預(yù)警級(jí)別散點(diǎn)圖
交通場(chǎng)景下,碰撞時(shí)間與預(yù)警輸出示意圖,如圖14所示,上方坐標(biāo)系的橫軸表示當(dāng)前幀在圖像序列中的索引,縱軸表示碰撞時(shí)間TTC的值,圖中每一幀的索引對(duì)應(yīng)該幀中當(dāng)前車輛與目標(biāo)車輛的碰撞時(shí)間,紅色的點(diǎn)表示一級(jí)預(yù)警,黃色的點(diǎn)表示二級(jí)預(yù)警,綠色的點(diǎn)表示三級(jí)預(yù)警,下方的圖像表示特定幀在圖像中的預(yù)警結(jié)果,黃色矩形框表示目標(biāo)的位置,其下方的字體描述預(yù)警界別。
3.4 并線預(yù)警實(shí)驗(yàn)分析
該實(shí)驗(yàn)主要應(yīng)用于結(jié)構(gòu)化道路,如:高速、高架道路等場(chǎng)景,并線預(yù)警算法對(duì)當(dāng)前車輛前方一定范圍進(jìn)行檢測(cè),并對(duì)可能變道的車輛進(jìn)行持續(xù)跟蹤,當(dāng)變道車輛開始進(jìn)入危險(xiǎn)區(qū)域時(shí),進(jìn)行預(yù)警,提示駕駛員及時(shí)減速避讓,防止因減速不及時(shí),導(dǎo)致與前方車輛發(fā)生追尾。并線預(yù)警實(shí)驗(yàn)結(jié)果,如圖15所示,綠色矩形框表示安全情況下目標(biāo)車輛的位置,這些車輛對(duì)當(dāng)前車輛安全行駛不能構(gòu)成潛在危險(xiǎn);當(dāng)目標(biāo)車輛進(jìn)入危險(xiǎn)區(qū)域后,該車輛的位置矩形框由綠色變成紅色,預(yù)警系統(tǒng)通過語音或指示燈提示駕駛員“前方車輛變道,注意減速避讓”;圖中紅色符號(hào)“×”表示目標(biāo)車輛中心位置的歷史軌跡,黃色曲線表示目標(biāo)車輛與當(dāng)前車輛的相對(duì)位置變化;完成前車并線并穩(wěn)定行駛后,停止預(yù)警。
3.5 非機(jī)動(dòng)車預(yù)警實(shí)驗(yàn)分析
在實(shí)際交通場(chǎng)景下,非機(jī)動(dòng)車屬于弱勢(shì)交通參與對(duì)象,同時(shí)由于非機(jī)動(dòng)車駕駛員交通安全意識(shí)不強(qiáng),容易突然變道或者曲線行駛,引發(fā)交通事故。該實(shí)驗(yàn)通過采集交通場(chǎng)景下的包含非機(jī)動(dòng)車的視頻數(shù)據(jù),對(duì)本文所述的非機(jī)動(dòng)車預(yù)警算法進(jìn)行測(cè)試,實(shí)驗(yàn)結(jié)果如圖16所示,黃色直線表示當(dāng)前車輛前方危險(xiǎn)區(qū)域,綠色和黃色矩形框分別表示非機(jī)動(dòng)車或行人的位置信息,當(dāng)非機(jī)動(dòng)車進(jìn)入危險(xiǎn)區(qū)域后,預(yù)警系統(tǒng)進(jìn)行預(yù)警,提示駕駛員注意前方非機(jī)動(dòng)車輛,注意避讓或減速。
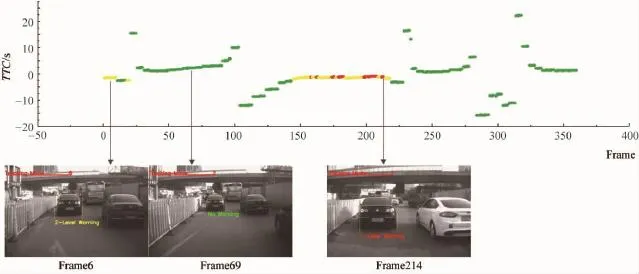
圖14 前車碰撞時(shí)間預(yù)警示意圖
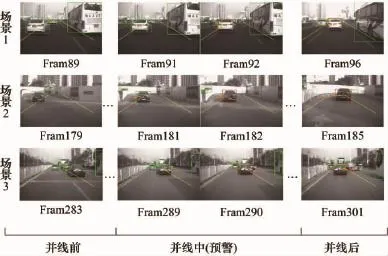
圖15 前車并線預(yù)警示意圖

圖16 非機(jī)動(dòng)車預(yù)警示意圖
4 結(jié)束語
本文提出的基于視頻的前車并線及碰撞預(yù)警算法實(shí)現(xiàn)了前車碰撞時(shí)間預(yù)警、前車并線預(yù)警以及非機(jī)動(dòng)車預(yù)警等功能。目標(biāo)檢測(cè)算法對(duì)交通環(huán)境下的車輛有較高的檢出率,有效提高了預(yù)警算法的準(zhǔn)確率,同時(shí),本文提出的基于路面紋理上下文信息的目標(biāo)跟蹤算法融合目標(biāo)周圍信息,實(shí)現(xiàn)對(duì)目標(biāo)的精確定位,可以準(zhǔn)確獲得前車目標(biāo)車輛的運(yùn)動(dòng)軌跡信息。根據(jù)檢出的結(jié)果,結(jié)合車載相機(jī)標(biāo)定方法,實(shí)現(xiàn)對(duì)前方車輛距離的估計(jì),為后續(xù)的綜合預(yù)警提供充足的信息。但是,由于交通環(huán)境復(fù)雜,難以衡量跟蹤算法對(duì)目標(biāo)的跟蹤結(jié)果的準(zhǔn)確性,較難把握檢測(cè)算法和跟蹤算法的切換時(shí)機(jī),在以后的工作中,將進(jìn)一步對(duì)長時(shí)跟蹤算法進(jìn)行研究,結(jié)合目標(biāo)的幾何及外觀信息等,進(jìn)行綜合判斷。
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48
