404 Not Found
404 Not Found
改進神經網絡的傳感器故障診斷與容錯處理*
溫嘉斌, 趙紅陽, 劉子寧, 包 漢
(哈爾濱理工大學 電氣與電子工程學院,黑龍江 哈爾濱 150080)
0 引 言
目前無刷直流電機(brushless DC motor,BLDCM)廣泛應用于工業(yè),航空航天等各個領域。無刷直流電機為獲取位置信號需要安裝位置傳感器,來檢測轉子位置。考慮到傳感器成本、體積等實際因素,無刷直流電機上使用最多的是霍爾傳感器,然而當出現惡劣的環(huán)境條件如:高溫、潮濕、外部震動、電磁干擾等均可能會對霍爾傳感器產生很大的影響,在控制系統(tǒng)中,霍爾傳感器的故障,將導致無刷直流電機工作異常,影響整個控制系統(tǒng)的穩(wěn)定性。因此,霍爾傳感器故障診斷及電機的容錯運行已經成為電機調速領域的一個研究熱點,國內外對此進行了大量相關的研究[1~6]。
人工神經網絡是近幾十年來得到迅速發(fā)展的一個前沿課題。由于其能夠進行大規(guī)模并行處理,且具有高容錯性、高自組織性、自適應性及逼近任意非線性函數的能力,其在突破現有瓶頸,更深入地探索和研究非線性現象時發(fā)揮了重要的作用。文獻[7]設計了一種神經網絡狀態(tài)觀測器,根據實際系統(tǒng)和神經網絡觀測器輸出殘差,從而對傳感器故障進行診斷并確定容錯控制系統(tǒng)。文獻[8]提出一種基于神經網絡的時間序列預測器的傳感器故障診斷方法,先用神經網絡對傳感器輸出序列建立預測模型,然后利用神經網絡預測模型預測傳感器輸出值和傳感器實際輸出之差判斷傳感器是否發(fā)生故障。文獻[9]提出一種混合粒子群優(yōu)化(hybrid particle swarm optimization,HPSO)算法與神經網絡相結合的傳感器故障診斷的方法,利用HPSO算法對神經網絡模型參數進行了優(yōu)化,建立了預測模型,用于傳感器故障診斷。但當訓練樣本過大,且要求精度較高時,人工神經網絡還面臨一些難題,傳統(tǒng)反向傳播(back propagation,BP)神經網絡會有輸出均方誤差較大,診斷準確性較低的缺點。
本文設計了一種改進神經網絡霍爾傳感器故障診斷模型,并利用反電勢法對傳感器故障進行容錯處理。最后通過仿真驗證了整個控制系統(tǒng)的故障診斷能力,仿真結果表明,改進神經網絡性能更好,輸出誤差絕對值低于傳統(tǒng)神經網絡輸出誤差絕對值,傳感器故障診斷率高于傳統(tǒng)方案。當傳感器出現故障時,可實現電機容錯運行,有效提高了系統(tǒng)的穩(wěn)定性。
1 改進BP神經網絡的故障診斷及容錯策略
1.1 用于故障診斷的改進BP神經網絡算法及拓撲結構
BP神經網絡是一種多層前饋神經網絡,該網絡的特點是信號向前傳播,誤差反向傳播。輸入信號從輸入層至隱含層,最后到達輸出層。當輸出與期望不匹配時,則進入反向傳播,根據算法調節(jié)神經網絡各層權值與閾值,最終得到期望輸出[10]。
本文選擇電磁轉矩、相電壓、相電流、電磁轉速作為神經網絡診斷霍爾傳感器的故障特征。
為提高傳統(tǒng)BP神經網絡故障診斷準確率,本文設計了一種BP神經網絡組合模型,將傳統(tǒng)BP神經網絡并行組合,給每個神經網絡賦予相同初始權值,首先訓練單個BP神經網絡,每個BP神經網絡有對應權重,后通過算法將單BP神經網絡合并成多神經網絡并行組合模型,再利用樣本對組合模型進行反復訓練,調整每個神經網絡的初始權值,最終診斷結果由單BP神經網絡輸出函數加權得到。該算法詳細過程如下:
1)提取故障數據作為每個BP神經網絡的訓練樣本,設有b組訓練數據,每組訓練數據分布權值為1/b,對訓練數據進行預處理,初始化神經網絡的權值與閾值。
2)訓練每個BP神經網絡,用訓練數據訓練BP神經網絡并預測訓練輸出,得到預測誤差和E,誤差和E計算公式為
(1)
3)計算權重并進行權重調整,根據誤差和E計算序列權重w,權重計算公式為
(2)
(3)
式中g(i)為預測診斷輸出,y(i)為期望診斷輸出。
4)最后對單BP神經網絡進行組合,設組合神經網絡輸出函數為z(x),每個神經網絡輸出函數為f(x)1,f(x)2,…,f(x)i。z(x)滿足

(4)
輸出為神經網絡診斷結果。整個算法流程如圖1所示。
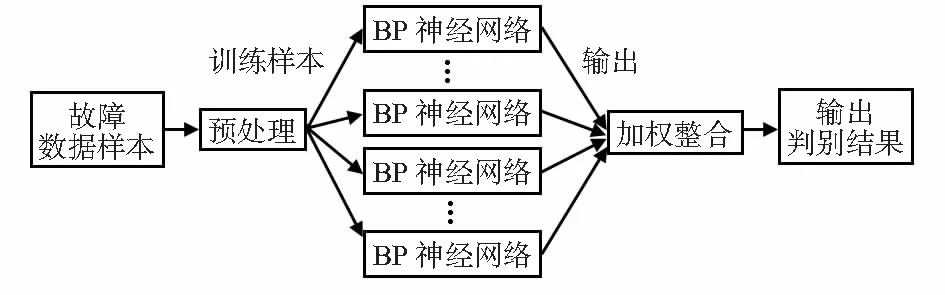
圖1 改進神經網絡算法流程
本文BP神經網絡采用4×4×5的三層結構,輸入層有4個神經元,對應上述傳感器故障4種特征指標,輸出層有一個神經元,當輸出1代表傳感器無故障,電機正常運行,輸出-1是代表傳感器出現故障。
改進神經網絡模型由4個傳統(tǒng)BP神經網絡組成,其拓撲結構如圖2所示,輸入為訓練樣本,樣本被送到4個BP神經網絡中,4個傳統(tǒng)BP神經網絡輸出加權得到改進神經網絡故障診斷輸出。
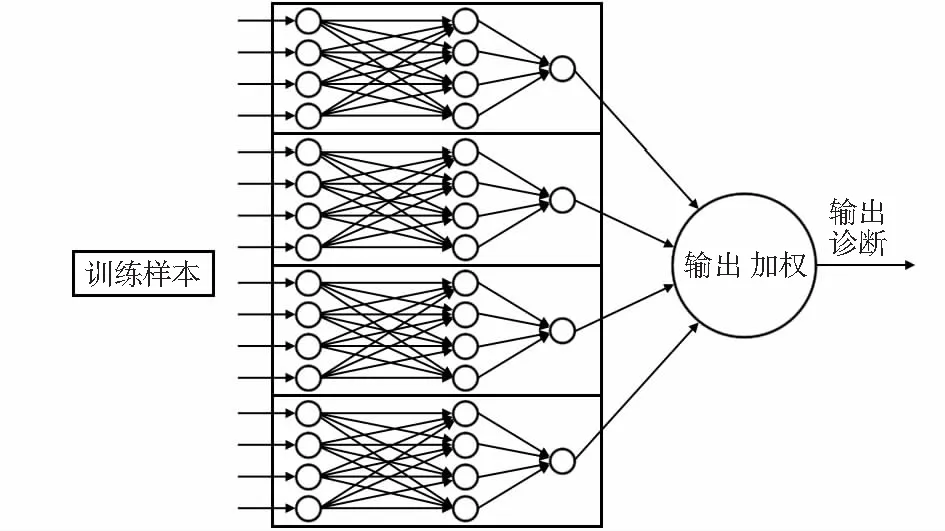
圖2 改進神經網絡結構
1.2 無刷直流電機傳感器故障容錯策略
在本文所設計的控制器中,采用了2套控制系統(tǒng)實現對電機的控制,其中,備用控制系統(tǒng)采用了無位置傳感器系統(tǒng)來對電機進行容錯控制。無位置傳感器系統(tǒng)選擇線反電動勢過零法作為其容錯控制方法。
為將有位置傳感器故障系統(tǒng)順利切換到無位置傳感器的工作模式,本文設計了基于S函數的線反電動勢過零點控制模塊,具體模型如圖3所示。S-F模塊內有編寫的S函數,在切換過程中可實現當前輸出值與無位置傳感器系統(tǒng)的輸出值進行統(tǒng)一。在容錯過程中只需要使用SIMULINK中的選擇模塊(Switch)便可以實現無刷直流電機從有位置傳感器啟動到無位置傳感器的運行的順利切換。
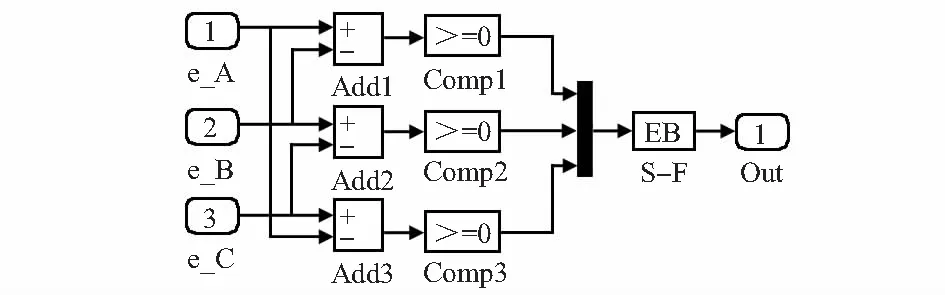
圖3 線反電動勢過零點模塊
2 系統(tǒng)仿真分析
為驗證本文所設計的無刷直流電機控制器的可行性,利用基于無刷直流電機的數學模型和MATLAB /SIMULINK搭建了無刷直流電機容錯系統(tǒng)。在仿真中選用的無刷直流電機參數:Rs=1 Ω,LM=6.7 mH,轉動慣量J=0.02 kg·m2,磁極對數為4,反電動勢系數為Ke=0.048 V/rpm,阻尼系數B=0.000 2 N·m·s/rad。
在仿真中,本文在霍爾傳感器信號中加入與、或門作為擾動信號,模擬信號丟失或其他故障情況。仿真中設0.2 s加入擾動,模擬霍爾傳感器出現換相延遲及單個霍爾傳感器故障,發(fā)生以上故障時無刷直流電機轉速波形如圖4所示,從圖中可觀察到,傳感器出現故障及受到干擾時電機運行過程中均出現波動,電機不能平穩(wěn)運行,單相傳感器出現故障時電機在運行中相較另一種情況波動較大。
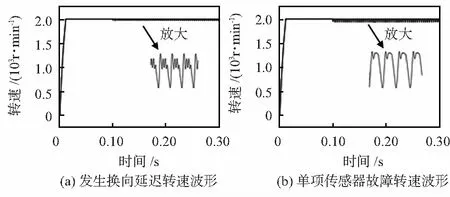
圖4 霍爾傳感器發(fā)生故障無刷直流電機轉速波形
仿真后對故障特征參數進行數據提取,作為神經網絡的訓練樣本數據,考慮到神經網絡訓練速度并節(jié)約功耗,單個樣本的故障特征數據取故障發(fā)生后3 000個數值,以圖4為例,選取0.2 s后的3 000個電流、電壓、轉速、轉矩數據。從總故障樣本空間中選擇300組4×3 000訓練樣本,并分配權重,另取100組樣本作為測試數據。通過訓練,改進神經網絡訓練的均方差變化情況如圖5(a)所示,在482次訓練時達到穩(wěn)定。
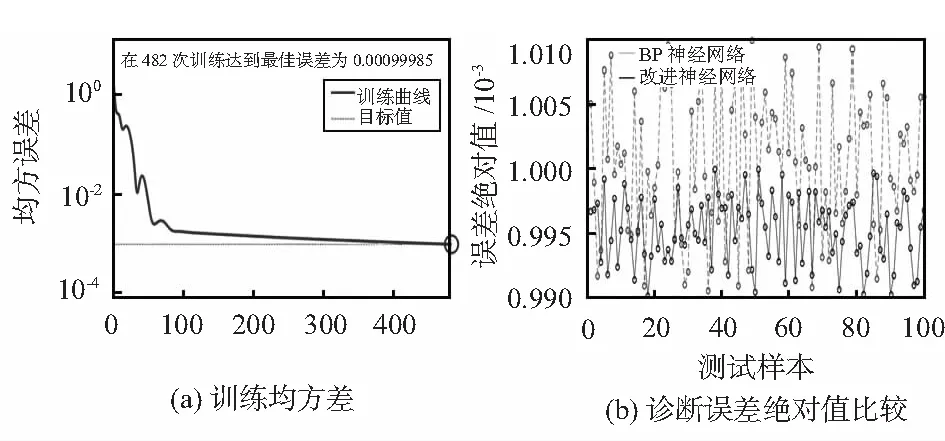
圖5 神經網絡訓練均方差及診斷誤差
圖5(b)為改進神經網絡與傳統(tǒng)BP神經網絡輸出誤差絕對值比較,可觀察到改進神經網絡輸出誤差明顯低于傳統(tǒng)BP神經網絡誤差。
取100組測試數據對神經網絡進行檢測,改進神經網絡故障診斷準確率達到96 %,傳統(tǒng)BP神經網絡故障診斷準確率為91 %。
設0.3 s加入神經網絡對故障進行診斷,針對換相延遲及傳感器出現故障兩種故障效果,無刷直流電機矯正后的轉速波形如圖6所示,從仿真結果可看出,采用容錯控制的電機幾乎無波動,與正常運行的電機性能基本保持不變,電機能夠正常運行。

圖6 霍爾傳感器發(fā)生故障容錯后無刷直流電機轉速波形
通過仿真和實驗驗證可知:1)改進神經網絡比傳統(tǒng)BP神經網絡具有更高的故障診斷率,性能更好。2)當不使用容錯技術,霍爾傳感器受到干擾或出現故障時,電機轉速出現波動,不能平穩(wěn)運行。3)改進神經網絡檢測到霍爾傳感器故障后,控制系統(tǒng)切換至無位置傳感器系統(tǒng)實現容錯處理,對電機的轉速波動有明顯的糾正,電機能夠實現平穩(wěn)運行。
3 結束語
本文針對BP神經網絡在樣本數據量大,導致誤差較大,準確率較低的問題,設計了一種改進神經網絡模型,用于檢測霍爾傳感器故障,當檢測出故障時,系統(tǒng)切換到無位置傳感器系統(tǒng)對電機進行容錯控制。經過仿真驗證,改進神經網絡與BP神經網絡相比有更小的診斷誤差,且故障診斷率可達到96 %。霍爾傳感器出現故障時,控制系統(tǒng)可以保證無刷直流電機正常換相,電機實現較平穩(wěn)運行。
