載人潛水器運行管理機制探析
2019-09-10 07:22:44齊海濱李德威劉保華楊雷劉曉輝
海洋開發與管理 2019年7期
關鍵詞:運行管理
齊海濱 李德威 劉保華 楊雷 劉曉輝
摘要:為了探索深海,不同類型的深海運載裝備得以成功開發,并應用于深海科學、資源勘探開發、工程保障及戰略安全等不同領域。深海運載裝備可以分為載人潛水器(HOV)、遙控深潛器(ROV)、自治式深潛器(AUV)及混合型深潛器,其中以載人潛水器為代表的高技術裝備群成為建設海洋強國的重要保障力量。文章對美國“阿爾文”號、俄羅斯“和平I”號和“和平II”號、日本“深海6500”號、法國“鸚鵡螺”號、中國“蛟龍”號載人潛水器運行管理機制進行了闡述,綜合比較其優缺點,提出了建立職業化運行保障隊伍、優化作業流程,創新組織結構、探索多型潛水器海上作業模式等運行管理機制構架的建議。
關鍵詞:載人潛水器;深海科學;資源勘探開發;作業流程;運行管理
中圖分類號:P7?文獻標志碼:A?文章編號:1005-9857(2019)07-0003-05
Abstract:In order to explore the deep sea,different types of deep-sea carrier equipment have been successfully developed and applied in different fields such as deep-sea science,resource exploration and development,engineering support and strategic security.Deep-sea carrier equipment can be divided into manned submersible (HOV),remote-controlled deep-sea submersible (ROV),autonomous deep-sea submersible (AUV) and hybrid deep-sea submersible,among which the high-tech equipment group represented by manned submersible has become a major guarantee for building a marine powerful nation.In this paper,the running management mechanism of manned submersible was expounded,such as “Alvin”“MIR I&II”“SHINKAI 6500”“NAUTILE” and “JIAOLONG”,their advantages and disadvantages were comprehensively compared,the advices of operational management mechanism architecture for establishing a professional operation security team,optimizing operation process,organization structure innovation,exploring more type submersible offshore operation management mechanism,and so on were put forward.
Key words:Manned submersibles,Deep sea science,Resources exploration and development,Operational process,Operation management
0?引言
海洋蘊藏著豐富的自然資源,其重要的戰略地位也在人類對海洋不斷加深的認識中越來越重要。為了探索深海,不同類型的深海運載裝備得以成功開發,并應用于深海科學、資源勘探開發、工程保障及戰略安全等不同領域。深海運載裝備可以分為載人潛水器(HOV)、遙控深潛器(ROV)、自治式深潛器(AUV)及混合型深潛器,其中以載人潛水器為代表的高技術裝備群成為建設海洋強國的重要保障力量[1]。
目前全世界的HOV總數約200余艘,根據2013年世界船級社統計數據顯示,正在使用中的HOV為95艘,其中:美國船級社30艘,法國必維船級社4艘,中國船級社1艘,挪威船級社4艘,德國勞氏船級社18艘,印度船級社2艘,美國海軍2艘,英國勞氏船級社19艘,日本海事協會1艘,意大利船級社2艘,其他12艘。但可潛入 6 000 m深的只有6艘。正在研建的有3艘,包括正在研建的中國“彩虹魚”號及日本“深海12000”。6 000米級有較成功應用的深潛器包括美國的“阿爾文”號、日本的“深海 6500”號、法國的“鸚鵡螺”號、俄羅斯的“和平Ⅰ/Ⅱ”號(Mir I/II)、中國的“蛟龍”號[2]。
據統計,迄今美國的“阿爾文”號已經成功完成了5 000次下潛;日本的“深海 6500”號作業潛次已超過1 500次;俄羅斯“和平Ⅰ/Ⅱ”號以兩條HOV互為替代,因具備較高的能源儲備,表現出較好的作業能力;法國“鸚鵡螺”號潛水器迄今已完成超過1 800余次下潛作業,其在軍事領域應用最為頻繁;應用時間最短的中國“蛟龍”號潛水器也已完成近160次下潛任務。在實際應用中,每個潛水器因為背景、理念、需求的差異形成了不同的運行管理體制,本研究將對以上5個國家潛水器運行管理機制進行論述,并就如何更高效地運行載人潛水器進行探討。
1?國內外載人潛水器運行管理現狀
1.1?美國“阿爾文”號載人潛水器
“阿爾文”載人潛水器建成于1965年,經過多次的增改裝,目前屬于美國海軍,編號DSV-2,由伍茲霍爾海洋研究所(WHOI)負責日常的管理、應用和維護,“阿爾文”號主要是為科學家們服務的,任何美國科學家(或與其合作的外國科學家)都可向美國科學基金委申請使用“阿爾文”號。
WHOI設置了一個叫DSOG(The Deep Submergence Operations Group)的部門來管理“阿爾文”號,這個部門有13個人員編制,包括駕駛員、培訓駕駛員以及技術員,這個團隊的領導由駕駛員擔任。
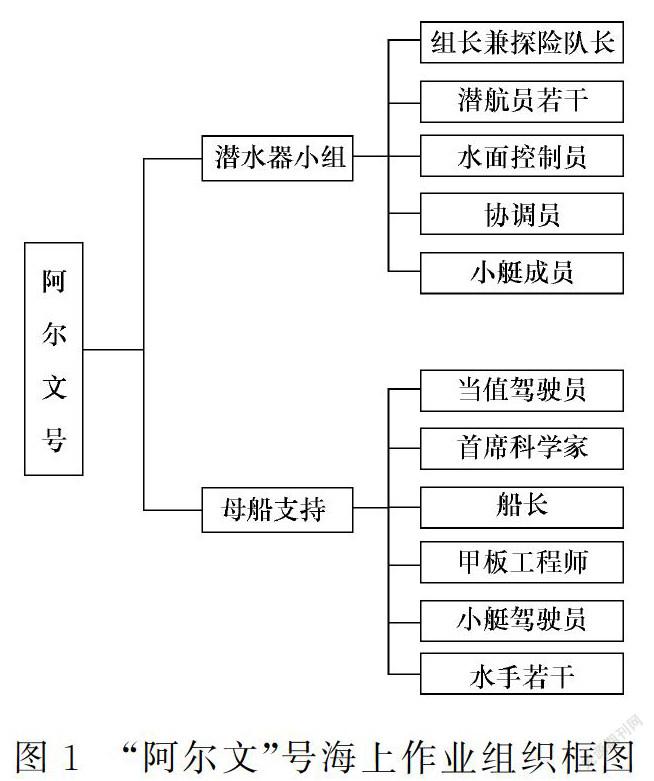
“阿爾文”號執行海上任務期間,主要組織結構分為潛水器小組及母船支持組,潛水器小組由組長兼探險隊長、潛航員、水面控制員、協調員、小艇人員組成;母船支持組由當值駕駛員、首席科學家、船長、甲板工程師、小艇駕駛員及水手組成,如圖1所示具體崗位設置如下。
(1)探險隊長1名,下潛任務的最高決策者,擁有決定是否下潛、執行哪些任務,誰來擔任各個工作崗位的權力,兼任潛水器小組的組長。
(2)首席科學家1名,科學活動的組織者和領導者。
(3)船長1名,支持母船的領導者、負責安排船上的海員、設備以及船舶航行 。
(4)潛航員1名,負責潛水器的駕駛,來自潛水器小組的正式潛航員。
(5)水面控制員2名,上午和下午各1名,以午飯時間為界,負責水面控制,來自潛水器小組。
(6)當值駕駛員多名,在艦橋駕駛母船,由船上的大副、二副、三副以及高級水手擔任。
(7)甲板工程師1名,負責母船甲板設備的運作。
(8)小艇駕駛員2名,布放和回收各1名,負責駕駛小船,來自母船上的二級水手。
(9)A形架操作員2名,布放和回收各1名,操作A形架。
(10)協調員2名,布放和回收各1名,利用無線電通信,協調各方工作,來自潛水器小組。
(11)水手4名,布放和回收各2名,負責纜繩的掛鉤和解脫,潛水器水面上的檢查和操作,來自潛水器小組和二級水手。
一般情況,來自潛水器小組的同一個人在1天內分別擔任水面控制員和協調員;在執行1次任務的2個水手當中,必須有1人來自潛水器小組,該人操作水聲電話;另一個人負責纜繩等工作。在嚴酷的環境條件下,會增加1名水手進行回收的工作。
每個潛次執行前,“阿爾文”號保障人員會對潛水器進行安全巡檢及操作檢查,形成檢查表格,并由本潛次潛航員、水面控制員、母船船長、探險隊長及首席科學家會簽。
升級后的“阿爾文”號,載人艙一次能容納3人,一般是1名潛航員、2名科學家。其執行下潛任務期間,有全套的程序手冊可以遵循,其中包括潛水器下潛程序、上浮程序、水下操作限制程序、回收程序、緊急情況下的潛水器操作程序、潛水器載人艙內消防程序、緊急上浮程序、載人艙釋放程序和水密失聯后的操作程序等。潛水器的操作手冊也會特地說明,沒有任何一部操作程序可以涵蓋所有可能發生的緊急狀況,因此,潛水器的安全全部依賴于駕駛員的知識和技能,手冊只能列出在明顯緊急情況時的操作。但是,一旦使用該操作程序,必須嚴格地執行,以便水面控制員能夠通過少量的通信就可以處理問題。如果對這個操作程序有任何更改,必須告知水面控制員[3]。
1.2?日本“深海6500”號載人潛水器
日本三菱重工業株式會社神戸造船所1989年建成了下潛深度為 6 500 m的“深海 6500”潛水器,水下作業時間8 h,曾下潛到6 527 m深的海底,共下潛1 500余次。“深海6500”號目前隸屬于日本海洋-地球科學技術機構(Japan Agency for Marine-Earth Science and Technology, JAMSTEC)。
2004年4月,JAMSTEC 委托日本海洋事業株式會社(Nippon Marine Enterprises,Ltd)負責其所有科考船舶及潛水器的運營管理,其中就包括“深海6500”號載人潛水器。
“深海6500”號載人潛水器由10余人的保障團隊負責其日常維護保障及海上作業。“深海6500”號載人潛水器對潛航員的培養,首先是從潛水器維護保障工作開始,在對潛水器有了較為熟悉的整體了解后,才開展潛航訓練,根據培訓課程內容要求,潛航員學員需要進行2~3年維護保障和多次潛航訓練才能成為副駕駛潛航員,進行正式的下潛作業。副駕駛在多次參與正式下潛后,逐漸成長為具備獨立下潛能力的主駕駛潛航員,這一般需要7~8年的時間[4]。
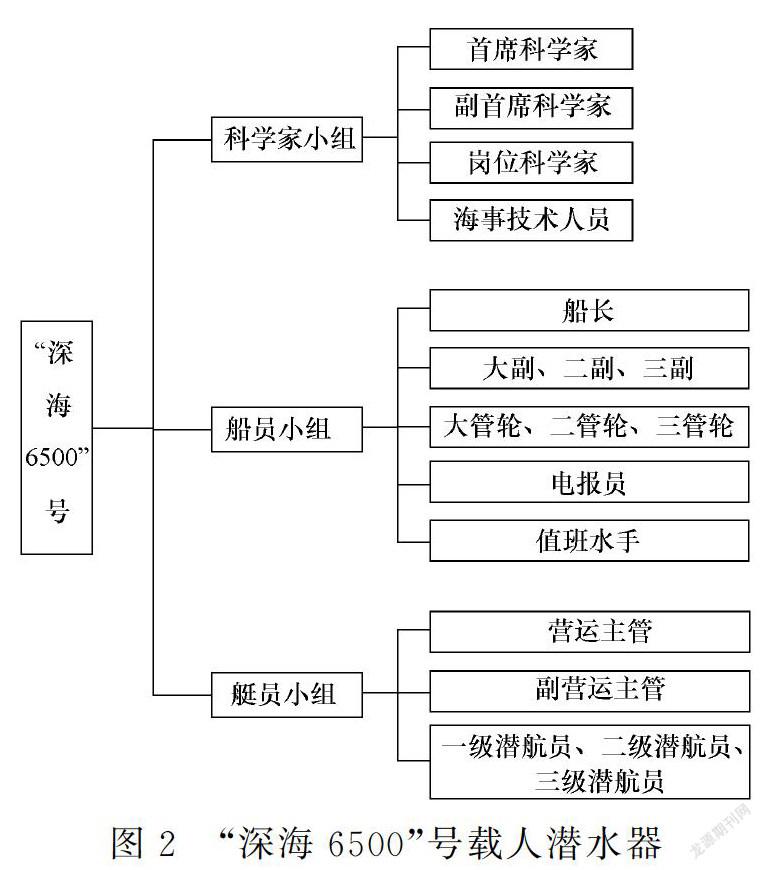
“深海6500”號執行海上作業期間,主要組織結構分為科學家小組、船員小組及艇員小組,科學家小組主要由首席科學家、副首席科學家、崗位科學家及海事技術人員組成;船員小組由船長、大副、二副、三副、輪機長、大管輪、二管輪、三管輪、電報員、值班水手等組成;艇員小組由營運主管、副營運主管、一級潛航員、二級潛航員、三級潛航員等。一般情況下運營主管由潛航隊長擔任[5] (圖2)。
1.3?俄羅斯“和平I”號與“和平II”號載人潛水器
俄羅斯“和平I”號與“和平II”號載人潛水器修建于1985年5月,1987年12月開始運行,1994年和2004年進行過兩次大修,該潛水器長7.8 m,寬3.6 m,高3.0 m,總重量18.6 t,最快速度5 kn,最大下潛深度6 000 m,其中“和平I”號的最大試驗深度6 170 m,“和平II”號的最大試驗深度6 120 m。“和平I”號“和平II”號載人潛水器隸屬于俄羅斯希爾邵夫海洋研究所,該研究所是俄羅斯目前規模最大、設備最新、技術實力最雄厚的綜合性海洋研究所。
俄羅斯希爾邵夫海洋研究所,設有“科學開發深海載人潛水器實驗室”,深海載人潛水器運行團隊,現有的潛航員同時也是“和平”號載人潛水器技術研發和專業維護人員。
兩臺“和平”號潛水器的專職潛航員3名,都能獨立攜帶科學家完成科學考察和地質生物取樣等下潛任務;專業技術人員6名,分別承擔“和平”號潛水器各個分系統維修維護任務,同時也可客串潛航員進行下潛作業任務[5]。
1.4?法國“鸚鵡螺”號載人潛水器
法國海洋開發研究院在1985年研制成功工作水深為6 000 m的“鸚鵡螺”號的載人潛水器,重量為18.5 t,可載3人,水下作業時間5 h。法國海洋開發研究院(IFREMER)成立于1984 年5月,由原在布雷斯特的法國國家海洋開發中心(CNEXO)和南特海洋漁業科學技術研究所(ISTPM)合并而成,簡稱IFREMER。研究院受法國工業科研部和海洋國務秘書處雙重領導,研究海洋開發技術和應用性海洋科學。
法國海洋開發研究院成立深潛部門(Underwater Systems Unit),該部門人員分為4個技術組,管理團隊為10人,水下機器人組為10人,電氣組9名,機械組13名,其中技術組的負責人均為管理團隊成員,水下機器人組負責HOV、AUV、ROV的操作,其余技術組負責維護保養及研制工作[7]。
1.5?中國“蛟龍”號載人潛水器
“蛟龍”號載人潛水器項目是國家“十五”“863”計劃的重大專項之一,于2012年在馬里亞納海溝下潛至7 062 m,創造了作業型載人潛水器的最大下潛深度。“蛟龍”號隸屬于中國大洋礦產資源研究開發協會(COMRA),由國家深海基地管理中心(NDSC)負責運營。
國家深海基地管理中心下屬的技術部負責“蛟龍”號的日常保障運營,該部門同時承擔“海龍”號ROV及“潛龍”號AUV的部分保障工作。技術部現有“蛟龍”號潛航員團隊8人、技術保障人員12人、技術工人2人,負責三型潛水器的操作及運行保障工作。
“蛟龍”號執行海上任務期間,執行臨時黨委領導下的航次現場總指揮負責制,現場總指揮由航次組織實施單位派出,現場指揮部和臨時黨委成員由主要參航單位人員組成。現場指揮部下設4個部門,分別是水面支持部門、潛水器部門、母船支持部門及科學家小組,每個部門的部門長均是指揮部成員。水面支持部門由水面支持副總指揮、水面支持部門長、A型架操作員、軌道車操作員、纜車操作員等組成;潛水器部門由潛水器部門副總指揮、潛水器保障部門長、潛水器作業部門長、超短基線操作員等組成;母船支持部門由船長、蛙人、當值駕駛員、當值輪機員、當值水手、當值機工等人員組成;科學家小組由首席科學家、崗位科學家組成。首席科學家、水面支持副總指揮、潛水器部門副總指揮、母船船長是現場指揮部成員,參與決策,并具有對潛次任務一票否決權[8]。
每個潛次執行前,科學家會同潛次主駕駛制訂本潛次的作業計劃,在現場指揮部會議上向指揮部成員匯報,現場指揮部結合氣象、設備狀況、科學目標等因素進行集中討論后,決定是否執行下潛任務,會后首席科學家會簽潛次作業計劃表,報總指揮簽署后正式執行。
2?問題及建議
綜合國內外5家典型載人潛水器運行管理情況可知,目前,國際上尚未形成統一的運行管理機制。以俄羅斯“和平”號為代表的載人潛水器,是以研制人員為主要運行保障團隊的管理方式,可以有效提高潛水器維護保障效率,便于進行潛水器升級改造等工作;以美國“阿爾文”號為代表的載人潛水器,是以科學目的為導向,以裝備為重要保障條件的運行體制,科學目的明確,可以有效提高潛水器的使用效率;以日本“深海6500”號為代表的載人潛水器綜合其他類型潛水器于一個保障團隊,可以提高作業效率,降低保障成本,形成集群效應。
2.1?建立職業化運行保障隊伍
考慮到載人潛水器的作業模式,綜合國內外載人潛水器的使用情況,為了最大限度提高載人潛水器使用效率,降低運維成本,建立職業化的運行保障隊伍是必不可少的,這支隊伍不但能夠承擔潛水器駕駛任務,還需要具備熟練的專業技能,能夠承擔分系統的維護保障工作,同時具備一定的科研能力,可以從作業需求方面,對潛水器進行局部升級改進。
2.2?優化作業流程,創新組織結構
借鑒“蛟龍”號載人潛水器保障運行中“一人多崗、一崗多能”的工作理念、充分總結歷年航次經驗,建議通過優化崗位配置、提高設備自動化程度、縮減作業流程、細化航次及潛次任務等方式進一步降低人力成本、縮短海上作業準備時間,從而提高整體海上作業效率。
2.3?探索多型潛水器海上作業模式
隨著人類對海洋認知的加深,單型潛水器已經不能滿足人類對海洋探索的需求,載人潛水器雖具有獨特的海底作業優勢,但并不能包攬一切海底作業,將來,多型潛水器搭配使用,將會起到事半功倍的效果。比如對MH370客機的搜尋,集成各型潛水器的調查船舶,可以首先使用水下自治機器人(AUV)進行長時間、大范圍內的搜索,確定疑似目標;使用遙控水下機器人(ROV)進行疑似目標排除乃至確認目標物,最后使用載人潛水器(HOV)進行精細作業,配合打撈等工作[9]。當然,不同的作業目標,決定了各型潛水器如何相互配合乃至聯合作業的具體方式,因此探索多型潛水器海上作業模式、構建運行管理機制就變得尤為重要[10]。
3?結語
上述5個國家的典型載人潛水器,都因為其研制背景、政治體制、理念及需求等原因形成了不同的運行管理機制,但均能夠有效保障潛水器的正常運行,并取得諸多的科學成果。綜合比較,其運行管理機制各有所長,但也有很多的共同點,比如均具有國家財政支持背景、其保障團隊基本由研發人員或經系統培訓的人員組成、多數致力于建設裝備共享平臺(面向國內或國際)等。
參考文獻
[1]?任玉剛,劉保華,丁忠軍,等.載人潛水器發展現狀及趨勢[J].海洋技術學報,2018,37(2):114-121.
[2]?KOHNEN W.Review of Deep Ocean Manned Submersible Activity in 2013[J].Marine Technology Society Journal,2013,47(5):56-68.
[3]?BRUCE STRICKROTT W.The Deep Submergence Vehicle Alvin[J].The Journal Of Ocean Technology,2017,1(12):35-44.
[4]?運航チーム.[EB/OL].[2019-01-16].http://www.jamstec.go.jp/shinkai6500/pilots/.html
[5]?Cruise report YK12-13 of Sanriku-Japan Trench [EB/OL].(2012-08-24)[2019-01-16].http://www.godac.jamstec.go.jp/darwin/datatree/e.html
[6]?Deep-water inhabited underwater vehicles[EB/OL].[2019-01-16].https://ocean.ru/en/index.php?option=com_k2&view=item&layout=item&id=173&Itemid=166.html
[7]?Nautile[EB/OL].(2018-04-26)[2019-01-16].https://wwz.ifremer.fr/cmsm/Les-Systemes/Nautile.html
[8]?張奕,丁忠軍.“蛟龍”號載人潛水器安全保障制度構建研究[J].海洋開發與管理,2017,34(11):32-36.
[9]?劉峰.深海載人潛水器的現狀與展望[J].工程研究—跨學科視野中的工程,2016,8(2):172-178.
[10]?楊磊,杜志元,陳云賽,等.我國三類典型深海運載裝備應用技術研究[J].海洋開發與管理,2018,35(9):100-106.
猜你喜歡
價值工程(2016年36期)2017-01-11 19:28:42
建筑建材裝飾(2016年11期)2016-12-29 19:12:42
中國科技縱橫(2016年20期)2016-12-28 16:55:16
科技創新與應用(2016年34期)2016-12-23 19:45:04
中國科技博覽(2016年25期)2016-12-20 20:00:35
中國科技博覽(2016年25期)2016-12-20 19:19:17
企業技術開發·下旬刊(2016年9期)2016-11-23 03:27:14
中國科技博覽(2016年18期)2016-10-19 06:51:11
科技視界(2016年17期)2016-07-15 10:23:51
科技視界(2016年6期)2016-07-12 14:44:33
