考慮等待位置的航空器交叉滑行沖突概率模型*
2019-09-06 07:00:32康瑞,楊凱
中國安全生產科學技術 2019年8期
康 瑞,楊 凱
(1.中國民用航空飛行學院 空中交通管理學院,四川 廣漢 618307; 2.四川大學 視覺合成圖形圖像技術國防重點學科實驗室,四川 成都 610064; 3.四川大學 計算機學院,四川 成都 610064)
0 引言
空中交通運輸需求逐年增長,機場不斷增容擴建,機動區結構、滑行道系統復雜度也相應提升。當場面運行繁忙時,航空器滑行路徑交匯、重疊等情況較為常見,由此產生的航空器側向間隔逐漸減小,最終產生擁堵、沖突甚至碰撞的風險也隨之增加。因此對航空器交叉滑行沖突趨勢進行研究,合理量化沖突風險,對提升機場運行安全水平和空管保障能力有至關重要的作用。
目前相關研究工作取得了一些進展[1-13],滑行道分配策略是防范滑行沖突的主要方法,例如構建滑行路徑規劃算法,減少滑行交叉頻率,降低沖突風險[2-6]。但由于滑行道資源有限,該方法勢必帶來滑行時機延遲、機坪等待時間增加等弊端。還有學者利用A-SMGCS[8-10](增強型地面控制與引導系統)等技術,精確規劃航空器占用交叉道口次序和時機[7-10],使飛機滿足安全間隔依次滑行。但絕大多數機場未安裝此類設備,且航空器滑行速度、占用交叉口順序均有一定隨機性,嚴格控制實時滑行速度需要管制員大量指令和計算,造成管制工作負荷過高[11],容易引發其他運行危險,因此該方法難以在實際中應用。此外,一些學者建立概率模型量化風險以探測沖突,例如潘衛軍等[12]考慮速度、位置變化定義了十字交叉口碰撞概率模型;汪磊等[13]以蒙特卡洛方法量化風險。但由于對管制規則、滑行道結構及等待位置等關鍵因素考慮不全面,沖突概率計算結果存在較大誤差。更重要的是,碰撞是滑行沖突的極端形態,安全運行應以防止沖突為目標。鑒于此,基于實時滑行速度,抽象場面運行程序,考慮等待位置和噴流影響等關鍵要素,擴大沖突區域,建立航空器交叉沖突概率計算模型,進行仿真及實際數據驗證[14],最后給出分析討論。
1 交叉沖突運行分析
本文將交叉沖突定義為多架航空器從上游不同的滑行道,經不同方向滑行至同一交叉口的匯聚滑行現象,由圖1所示,航空器前方虛線及箭頭表示滑行路徑,深色方塊陰影區域為交叉口路徑重疊區,三角形區域為前機發動機噴流范圍。
如圖1中Y型交叉口所示,航空器在達到路徑重疊區前側向間隔逐漸減少,有可能產生機翼擦掛和碰撞。圖1中十型交叉口所示,雖然前機已滑離路徑重疊區,此時后機未進入重疊區,但由于重疊區范圍較小,后機仍處于前機發動機噴流影響范圍,已形成危險接近。因此僅以路徑重疊區作為沖突區域并不能保障運行安全,應結合實際運行規則對沖突區域進行擴展。
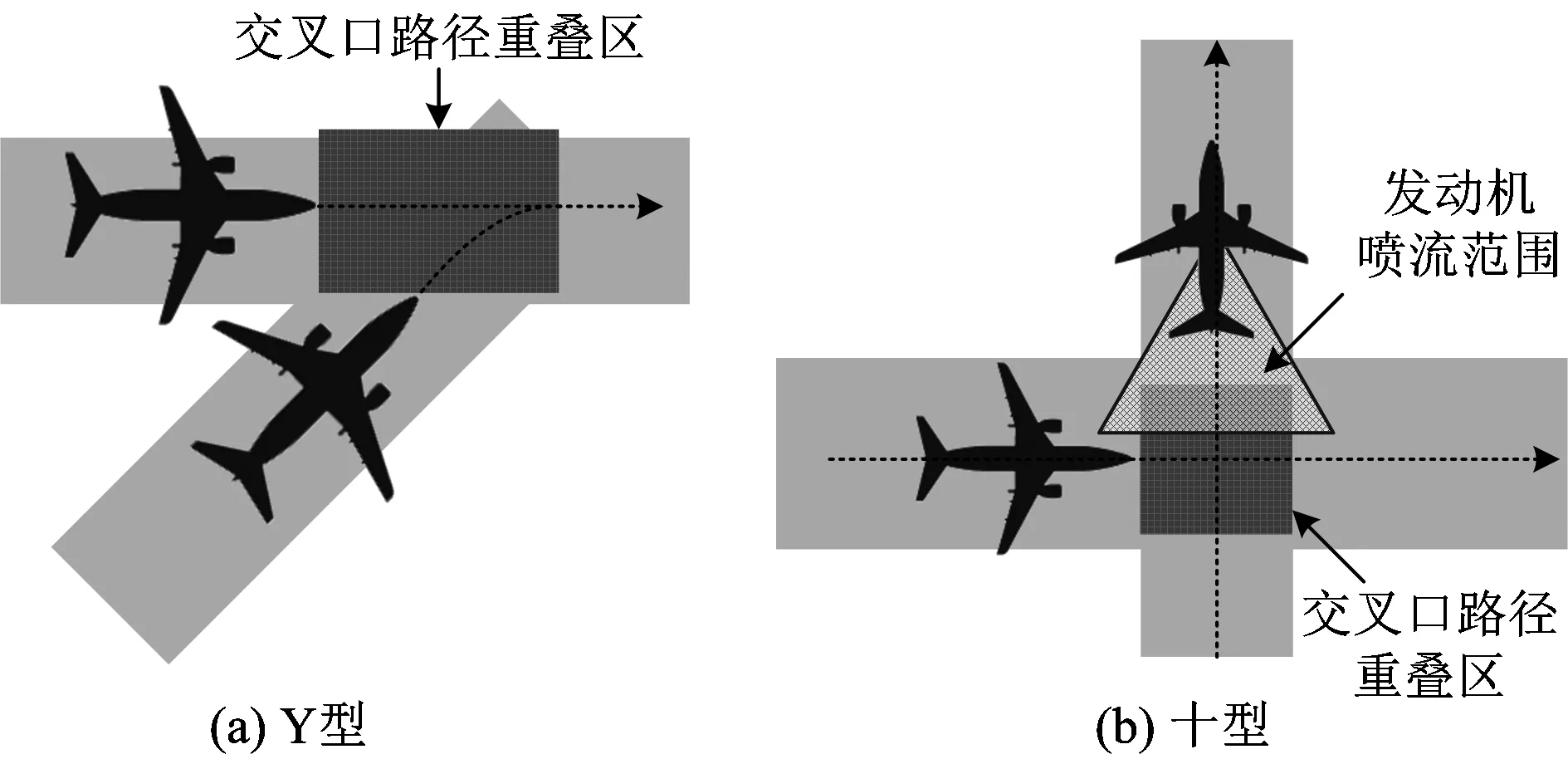
圖1 路徑重疊區及發動機噴流影響區Fig.1 Path overlap area and influence area of engine jet
實際機場管制中,為了確保側向間隔和噴流影響范圍,在滑行道交叉口前劃設了中間等待位置,如圖2所示,若有其他航空器位于交叉口,航空器不得越過入中間等待位置[15]。為了方便飛行員進行目視觀察,機場場面會劃設黃色停止等待線,并在該位置附近標識停止等待點,例如圖2中HP點,提示飛行員及時減速以避免沖突。由此應該綜合考慮沖突區等待位置、路徑重疊區、航空器機身長度、噴流影響范圍等幾個要素,重新定義沖突區域。
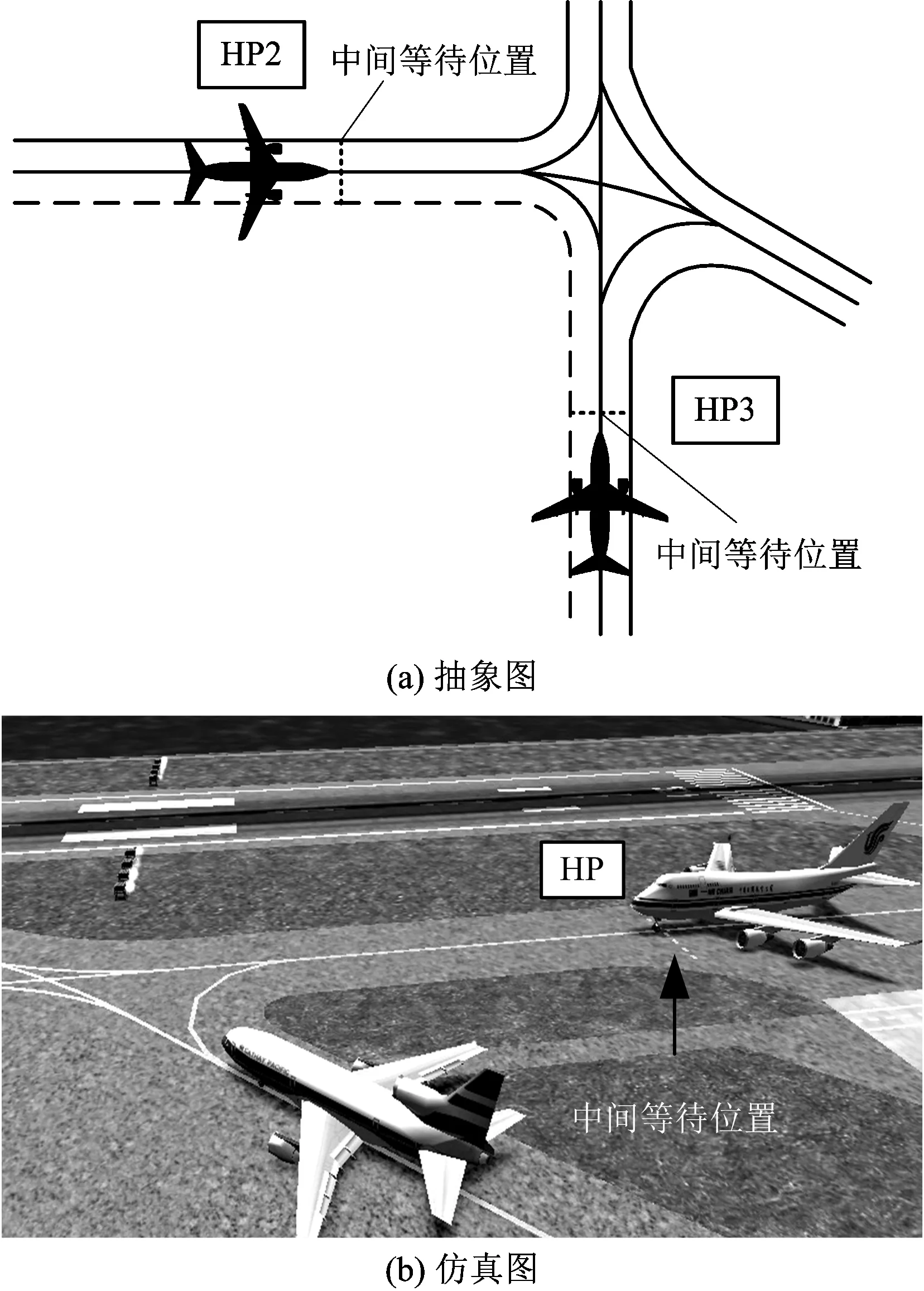
圖2 航空器滑行交叉口等待位置示意Fig.2 Schematic diagram for holding position of aircraft at taxiing crossing
2 考慮等待位置的交叉滑行沖突模型
2.1 參數描述
本文以滑行道系統中最常見的“T字”交叉口為例,描述交叉滑行各參數。圖3 描述了“T字”交叉口2架航空器fm與fn交叉滑行的情況。
2.2 模型構造
根據我國機場管制規則[15],若2架航空器同時位于沖突區域,會造成間隔不夠或擁堵,形成滑行沖突。因此未沖突的情況為:當航空器經過交叉口且全機身位于沖突區域外側(圖3中淺灰色航空器位置),此時另1架航空器才可進入沖突區域。
設Cm,Cn為航空器fm,fn在沖突區域內的滑行距離:
(1)
在t時刻不發生沖突的條件:
(2)
令Pm(t),Pn(t)為fm,fn先經過沖突區域且不沖突概率:
(3)
(4)
而航空器在交叉滑行中產生沖突的概率為:
(5)
2.3 模型求解
設t時刻vm(t),vn(t)在1個較小值域范圍內呈均勻分布,設概率密度函數為:
式中下標v表示黏性項, 其他各變量的意義參見文獻[22]. 湍流模擬采用k-ω SST湍流模型[22-23], 該模型在模擬弱分離的黏性問題中具有較高的精度. 采用有限體積法對流動主控方程及湍流模型方程進行數值求解, 時間推進采用LU-SGS方法[24-26], 空間處理采用Roe格式的通量差分離散, 黏性項采用中心差分格式加人工耗散項[23].
(6)

(7)
將式(2)改寫為:
(8)
(9)
上式可視為描述vm(t),vn(t)線性關系的函數φ(vm(t),vn(t)),φ′(vn(t),vm(t))。
根據式(6)~(9),設2種情況下,滿足條件的速度數值區間面積分別為S(t),S′(t),由式(2),將2個不發生沖突的條件改寫為:
由此可得:
(10)
(11)
求解可得:
(12)
(13)
將式(10)~(11)代入式(5),可得每時刻t的沖突概率,同時考慮防止概率值溢出大于1且不為負數,將式(5)改寫為:
(14)
3 試驗驗證與結果分析
3.1 仿真模擬及數據分析
設fm,fn為交叉滑行的2架航空器,Hm,Hn取值范圍為[0,150],每次仿真令Hm,Hn增加5,令t∈[1,100],根據我國管制規則[15],航空器滑行最大速度vmax=13.8 m/s。設置每時刻航空器速度值域范圍Δv=0.5 m/s[13],2飛機距離沖突區域邊界800 m。由于我國民航尾流等級M中型機運行比例達到83%,因此該類型運輸機型為例,設航空器機身長為50 m。設機場飛行區級別為4F,根據滑行道寬度限制,設交叉口滑行距離均為45 m,發動機噴流影響范圍50 m[15]。每次根據時間t、中間等待位置Hm,Hn變化仿真計算沖突概率,總是得到100×31個概率值。
對勻速運動狀態下沖突概率變化進行仿真計算,設fm,fn進行5 m/s速度的勻速、等距離運動,圖4給出沖突概率變化情況。
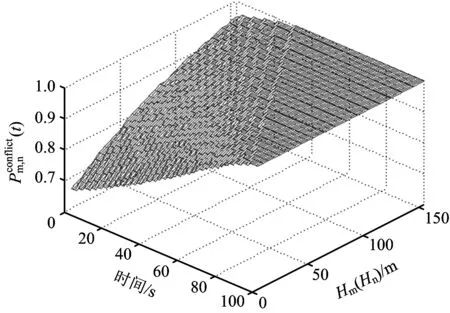
圖4 勻速運動時沖突概率變化趨勢Fig.4 Change trend of conflict probability in uniform

對勻加速運動狀態下沖突概率變化進行仿真計算,設fn進行以5 m/s速度的勻速運動,fm初始速度為0,以加速度0.1 m/s2做勻加速運動,圖5給出沖突概率變化情況。

圖5 勻加速運動時沖突概率變化趨勢Fig.5 Change trend of conflict probability in uniformly accelerated motion
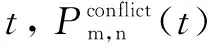
設fn進行以5 m/s速度的勻速運動,fm初始速度為10 m/s,以-0.1 m/s2勻減速直至停止,圖6給出沖突概率變化情況。
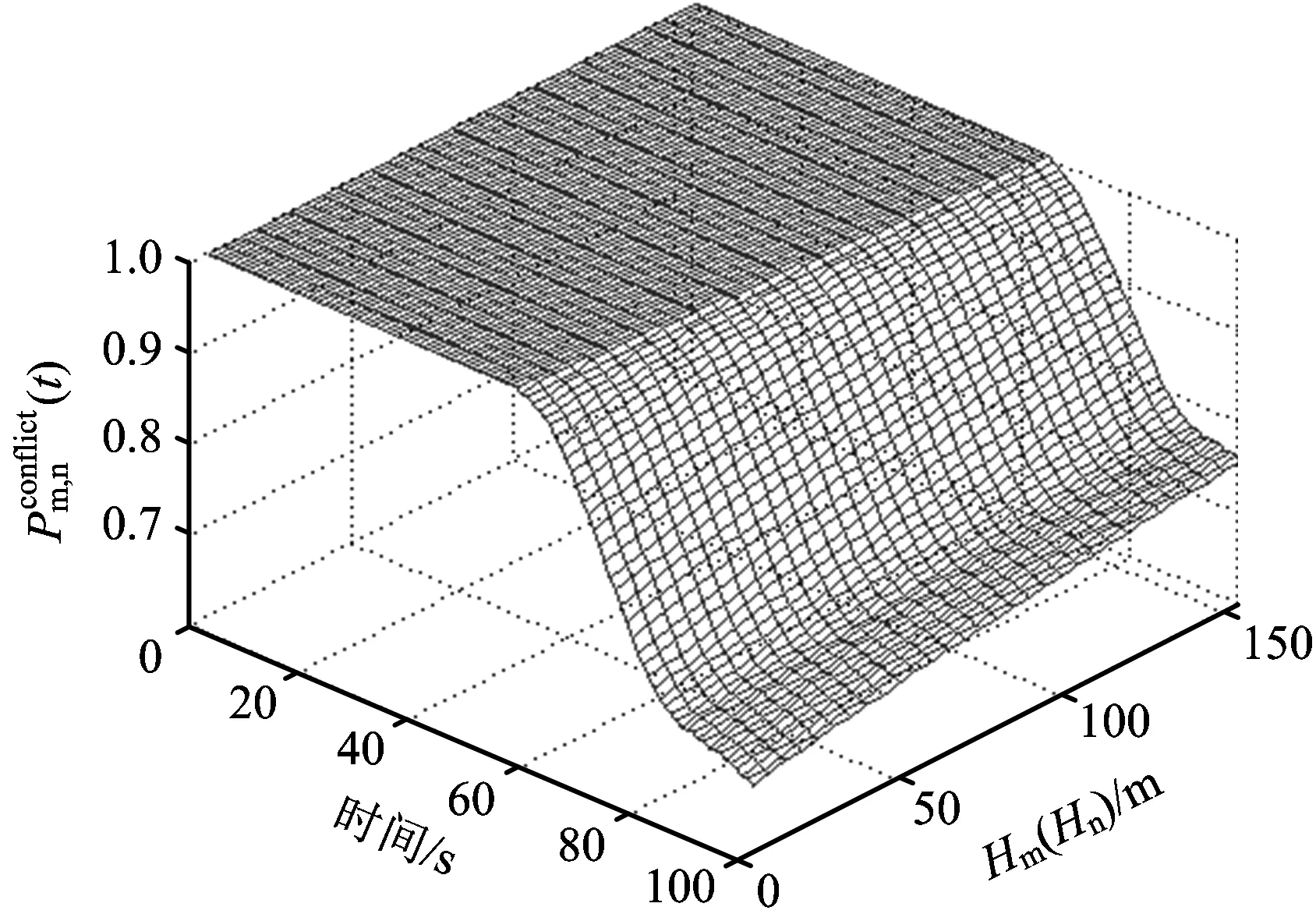
圖6 勻減速運動時沖突概率變化趨勢Fig.6 Change trend of conflict probability in uniformly decelerated motion

對比圖4~6可知,本文模型并不改變沖突概率隨時間變化的總體趨勢,與實際運行情況基本一致。由于局部擴展了沖突區域,沖突概率隨Hm,Hn增長幅度更明顯。這是由于沖突區域擴大更容易滿足沖突條件,同樣位置、速度時沖突概率較大。因此,交叉滑行道前方劃設中間等待位置能防止2機間隔過小才進行剎車避讓,能有效提前探測沖突,防止產生危險接近及交叉口堵塞。同時,若在距離交叉口較遠位處劃設中間等待位置,會導致沖突區域過大,航空器距離較遠時沖突概率過大,容易產生沖突誤判,致使航空器滑行產生多次中斷,降低運行效率。因此結合實際運行機型特點、跑滑結構,合理劃設中間等待位置,不進行盲目擴展,能有效防止交叉口滑行沖突,科學提高安全水平和運行效率。
3.2 實際運行數據驗證及分析

圖7為CSN3417與CSC8746在T型道口的交叉滑行沖突概率值與沖突形成及解脫實際軌跡。滑行重疊區用虛線矩形表示,黑色點為每秒鐘場面監視雷達監測到的航空器軌跡點,滑行方向如箭頭所示。根據實際機型及滑行道結構設置參數:Hm=Hn=22 m,ΔSm=ΔSn=50 m,ΔLm=35 m,ΔLn=55 m,Δln=45 m,Δln=40 m,由于前機CSN3417在16∶42∶21 s進入沖突區域,取2機在16∶40∶50—16∶42∶21共91 s的實際速度、位置計算沖突概率。
圖7 T型交叉口場景及沖突概率比較Fig.7 Scene of T-shaped crossing and comparison of conflict probability
圖7中,由于2航空器匯聚滑行,沖突概率隨時間t增加而增加,15 s后CSN3417,CSC8746速度分別為3,12.1 m/s,由于速度差較大,同時進入沖突區域的可能性較低,因此沖突概率逐漸減少。此后CSN3417加速至5.2 m/s,CSC8746減速至8.1 m/s,由此沖突概率突然增加至1.0,此時若2飛機不進行避讓減速,將造成危險接近甚至相撞。由于CSC8746所在滑行道右側機坪停駐多架飛機造成觀察盲區,CSC8746飛行員在16∶41∶40才發現交叉沖突并進行緊急剎車,此時距離沖突區域僅32 m,對應圖7(b)CSC8746在HP處產生大量聚集軌跡點,此后CSC8746繼續停止等待,沖突概率急劇下降為0。由圖7(a),本文模型計算的沖突概率與傳統模型變化趨勢基本一致,但由于加入了中間等待位置,參數相同時,本文模型沖突概率更大,因此能提前預判沖突產生。對比圖7(b),CSC8746以中間等待位置為界,在HP處停止等待。由此可知,本文引入中間等待位置擴展沖突區域,與實際運行過程相符。

4 結論
1)考慮T型交叉滑行時,中間等待位置、機身長度、發動機噴流的影響,合理擴展滑行沖突區域,該模型能夠實時計算航空器滑行沖突概率。
2)本文模型并不改變沖突概率隨時間變化的總體趨勢,與實際運行情況一致。在T型交叉結構下,本文模型沖突概率大于傳統模型,能提前探測沖突,防止危險接近及交叉口堵塞。中間等待位置較近時,會造成沖突判斷延遲,中間等待位置較遠時,容易產生沖突誤判,致使航空器滑行產生多次中斷。
3)利用實際T型交叉運行數據進行驗證,本文模型能夠量化沖突產生、發展及解脫過程,以輔助管制員、飛行員提前判斷滑行沖突,及時采取措施,提高機場運行安全水平。
4)改變交叉口構型關鍵參數及機型尾流、長度參數,該模型可擴展應用與Y型、十型交叉口道口沖突判斷。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
核科學與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2015年5期)2015-04-09 11:30:52
