一種用于遙測(cè)數(shù)據(jù)可視化的合成坐標(biāo)變換方法*
2019-09-03 07:22:36王瑋
計(jì)算機(jī)與數(shù)字工程 2019年8期
關(guān)鍵詞:關(guān)聯(lián)可視化
王 瑋
(91550部隊(duì) 大連 116023)
1 引言
飛行器飛行試驗(yàn)是由國(guó)家靶場(chǎng)組織實(shí)施,用以考核評(píng)定飛行器戰(zhàn)術(shù)、技術(shù)指標(biāo)的權(quán)威方式[1]。飛行器飛行試驗(yàn)遙測(cè)數(shù)據(jù)[2~3],是指遙測(cè)系統(tǒng)在試驗(yàn)中獲取的如時(shí)序、控制、動(dòng)力、力學(xué)環(huán)境等飛行器相關(guān)參數(shù)[4],是評(píng)定飛行器各項(xiàng)性能指標(biāo)的重要數(shù)據(jù)依據(jù)[5~6]。
傳統(tǒng)的遙測(cè)數(shù)據(jù)可視化方式,是基于傳感器測(cè)量數(shù)據(jù)的“時(shí)間-測(cè)量值”二維曲線[7~8],如“時(shí)間-壓力”曲線[9]。該方式的主要缺點(diǎn)是關(guān)聯(lián)信息匱乏[10],僅僅顯示了傳感器測(cè)量值,沒(méi)能顯示該傳感器所處的飛行器部位,更無(wú)法同步反映該采樣時(shí)刻飛行器的空間姿態(tài)。而很多性能指標(biāo)的評(píng)定,需要綜合分析上述數(shù)據(jù)才能得以進(jìn)行[11],數(shù)據(jù)之間的關(guān)聯(lián)性尤為重要,需要從可視化的角度,對(duì)上述數(shù)據(jù)進(jìn)行可視關(guān)聯(lián)[12]。
此類可視關(guān)聯(lián)的難點(diǎn)在于,可視化的圖形繪制,必須依賴于一定的坐標(biāo)系統(tǒng),而飛行器飛行試驗(yàn)的遙測(cè)數(shù)據(jù)、位姿數(shù)據(jù)定義在各自的坐標(biāo)系下,其坐標(biāo)系原點(diǎn)、軸向、數(shù)值范圍都有巨大差異。只有在坐標(biāo)系統(tǒng)層次完成一定程度的數(shù)據(jù)一致性構(gòu)建,才能進(jìn)一步實(shí)現(xiàn)多源數(shù)據(jù)的可視關(guān)聯(lián)。
為此,本文提出了一種用于飛行器飛行試驗(yàn)遙測(cè)數(shù)據(jù)可視化的多源數(shù)據(jù)合成坐標(biāo)變換方法,該方法針對(duì)遙測(cè)數(shù)據(jù)、位姿數(shù)據(jù)的可視關(guān)聯(lián)問(wèn)題,提出了“飛行器體發(fā)射坐標(biāo)系”的概念及坐標(biāo)變換算法,以之為核心構(gòu)建了方法的技術(shù)流程,在顯示飛行器位姿的同時(shí),將遙測(cè)數(shù)據(jù)映射到對(duì)應(yīng)傳感器在飛行器上的安裝部位,進(jìn)而實(shí)現(xiàn)遙測(cè)數(shù)據(jù)與飛行器空間位姿數(shù)據(jù)的可視關(guān)聯(lián)。
2 遙測(cè)數(shù)據(jù)可視化相關(guān)坐標(biāo)系簡(jiǎn)介
本文提出的遙測(cè)數(shù)據(jù)可視化,涉及三個(gè)坐標(biāo)系統(tǒng),即傳感器坐標(biāo)系、發(fā)射坐標(biāo)系、飛行器體坐標(biāo)系。
2.1 傳感器坐標(biāo)系
這里的傳感器,主要指遙測(cè)環(huán)境數(shù)據(jù),即溫度、壓力、振動(dòng)等數(shù)據(jù)對(duì)應(yīng)的測(cè)量傳感器。此類傳感器坐標(biāo)系為一維向量坐標(biāo)系,坐標(biāo)原點(diǎn)為傳感器與飛行器表面的觸點(diǎn),以觸點(diǎn)所在飛行器表面法線方向?yàn)檎较颉?/p>
2.2 發(fā)射坐標(biāo)系
發(fā)射坐標(biāo)系|O-XYZ|,其定義如下[13]:
原點(diǎn)O為發(fā)射臺(tái)中心在發(fā)射位的地面投影點(diǎn);
OX軸位于過(guò)原點(diǎn)O的水平面內(nèi),由原點(diǎn)O指向?qū)椛鋼裘闇?zhǔn)方向(從天文北向東轉(zhuǎn)過(guò)的角度);
OY軸取過(guò)坐標(biāo)系原點(diǎn)O的鉛垂線,向上為正;
OZ軸位于過(guò)坐標(biāo)系原點(diǎn)的水平面內(nèi),與OX軸OY軸構(gòu)成右手直角坐標(biāo)系。
2.3 飛行器體坐標(biāo)系
飛行器體坐標(biāo)系|O1-X1Y1Z1|固連在飛行器結(jié)構(gòu)體上,隨飛行器運(yùn)動(dòng),其定義如下[14~15]:
原點(diǎn)O1為飛行器制導(dǎo)系統(tǒng)的平臺(tái)中心;
O1X1軸位于飛行器體縱軸,指向飛行器尖頂;
O1Y1軸位于飛行器縱對(duì)稱面內(nèi),指向Ⅲ象限;
O1Z1軸與O1X1軸O1Y1軸構(gòu)成右手直角坐標(biāo)系。
3 支持遙測(cè)數(shù)據(jù)可視化的多源信息合成坐標(biāo)變換方法
3.1 方法概述
支持遙測(cè)數(shù)據(jù)可視化的多源信息合成坐標(biāo)變換方法,技術(shù)流程如圖1所示。核心是綜合處理遙測(cè)數(shù)據(jù)、姿態(tài)數(shù)據(jù)、位置數(shù)據(jù),通過(guò)坐標(biāo)變換技術(shù),在顯示飛行器姿態(tài)、位置的同時(shí),將遙測(cè)數(shù)據(jù)映射到對(duì)應(yīng)傳感器在飛行器上的安裝部位,實(shí)現(xiàn)了遙測(cè)數(shù)據(jù)與飛行器空間位置、姿態(tài)數(shù)據(jù)三類數(shù)據(jù)的可視關(guān)聯(lián)。
遙測(cè)數(shù)據(jù)經(jīng)由所在的傳感器坐標(biāo)系,通過(guò)坐標(biāo)轉(zhuǎn)換a算式,轉(zhuǎn)換到飛行器體坐標(biāo)系,由于傳感器測(cè)量值是一維向量,僅需要傳感器觸點(diǎn)在飛行器體坐標(biāo)系下的坐標(biāo),即可完成轉(zhuǎn)換,這里不再介紹。而發(fā)射坐標(biāo)系與飛行器體坐標(biāo)系,坐標(biāo)系定義和實(shí)際數(shù)值范圍都有巨大的差距,在可視技術(shù)上,很難統(tǒng)一到某個(gè)坐標(biāo)系下,即如果顯示發(fā)射系坐標(biāo)軸,飛行器將近似于一個(gè)點(diǎn),無(wú)法觀察飛行器姿態(tài);如果顯示飛行器姿態(tài),將無(wú)法顯示發(fā)射系坐標(biāo)軸,也就無(wú)法描述飛行器的位置信息。為此,該方法綜合發(fā)射坐標(biāo)系、發(fā)射慣性系與飛行器體坐標(biāo)系三大坐標(biāo)系特點(diǎn),提出了“飛行器體發(fā)射坐標(biāo)系”的概念,給出了坐標(biāo)轉(zhuǎn)換b算式(圖1),將已轉(zhuǎn)換到飛行器體坐標(biāo)系的遙測(cè)數(shù)據(jù),通過(guò)姿態(tài)數(shù)據(jù),轉(zhuǎn)換到飛行器體發(fā)射坐標(biāo)系,實(shí)現(xiàn)遙測(cè)數(shù)據(jù)與飛行器姿態(tài)的組合映射,最后利用飛行器體發(fā)射坐標(biāo)系和發(fā)射坐標(biāo)系之間的坐標(biāo)軸平行關(guān)系,實(shí)現(xiàn)可視關(guān)聯(lián)。

圖1 方法的技術(shù)流程
3.2 飛行器體發(fā)射坐標(biāo)系
飛行器體發(fā)射坐標(biāo)系|O2-X2Y2Z2|(圖2)固連在飛行器結(jié)構(gòu)體上,隨飛行器運(yùn)動(dòng),其定義如下:
原點(diǎn)O2為飛行器制導(dǎo)系統(tǒng)的平臺(tái)中心;
O2X2軸由原點(diǎn)指向發(fā)射時(shí)刻的射擊瞄準(zhǔn)方向;
O2Y2軸取過(guò)發(fā)射坐標(biāo)系原點(diǎn)的鉛垂線反向,向上為正;
O2Z2軸過(guò)發(fā)射坐標(biāo)系原點(diǎn)的水平面,與O2X2軸O2Y2軸構(gòu)成右手直角坐標(biāo)系。

圖2 飛行器體發(fā)射坐標(biāo)系
飛行器體發(fā)射坐標(biāo)系|O2-X2Y2Z2|,與發(fā)射坐標(biāo)系|O-XYZ|,飛行器體坐標(biāo)系|O1-X1Y1Z1|,三者之間的關(guān)系,如圖3所示。
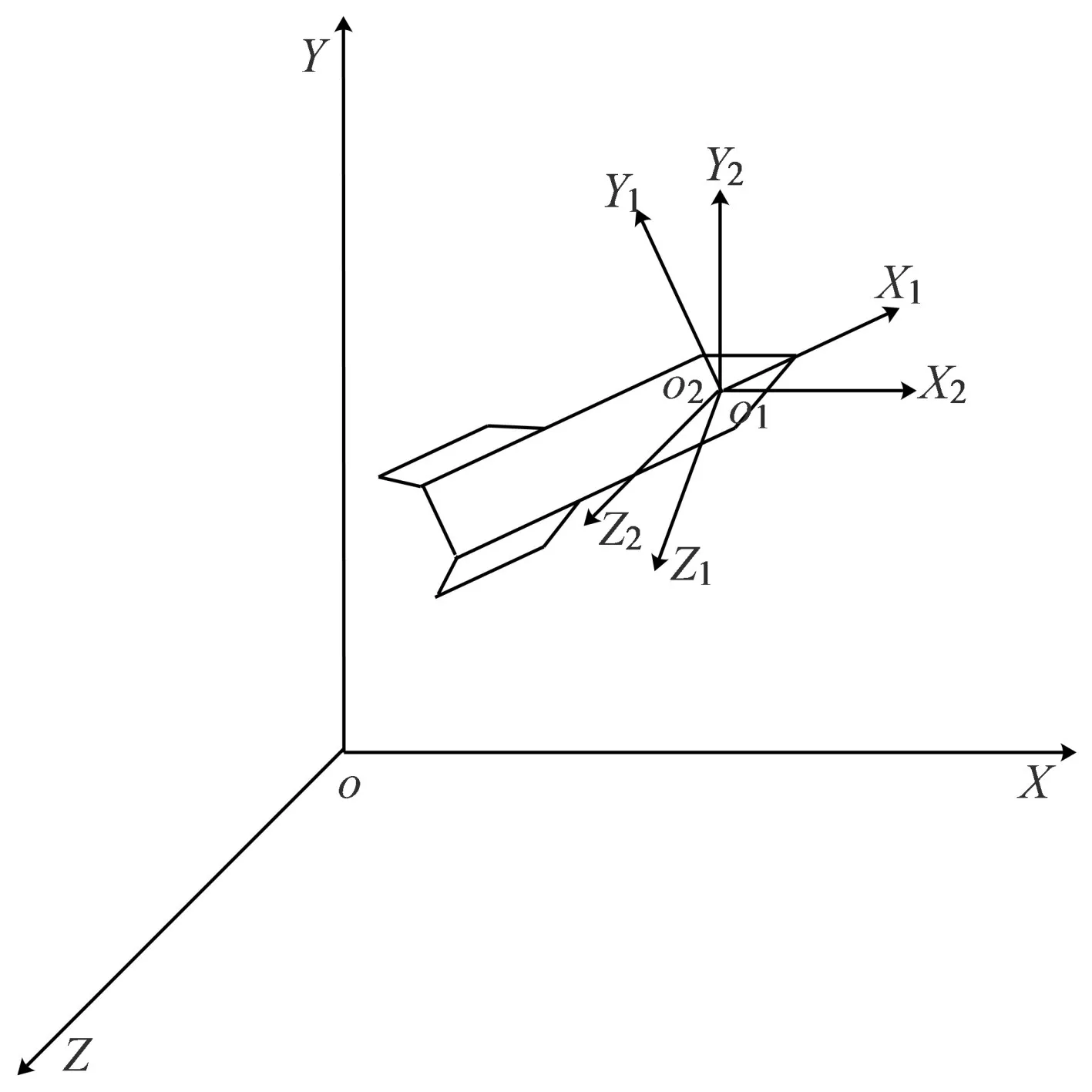
圖3 三種坐標(biāo)系統(tǒng)空間關(guān)系
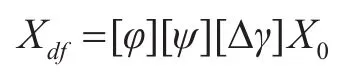
3.3 飛行器體坐標(biāo)系到體發(fā)射坐標(biāo)系轉(zhuǎn)換算式
4 仿真實(shí)驗(yàn)
本文采用仿真實(shí)驗(yàn)驗(yàn)證該方法的有效性,仿真數(shù)據(jù)包括一組某型飛行器遙測(cè)瞬時(shí)沖擊數(shù)據(jù),該傳感器觸點(diǎn)在飛行器體坐標(biāo)系上的安裝位置;飛行器對(duì)應(yīng)傳感器采樣時(shí)刻的姿態(tài)數(shù)據(jù),包括俯仰、偏航、滾動(dòng)三個(gè)姿態(tài)角。取t1、t2兩個(gè)時(shí)刻的兩組數(shù)據(jù),如表1所示。

表1 采樣時(shí)刻數(shù)據(jù)表
將沖擊數(shù)據(jù)在傳感器坐標(biāo)系的測(cè)量值,轉(zhuǎn)換為向量值,以箭頭長(zhǎng)度表示瞬時(shí)沖擊數(shù)值,以箭頭方向表示測(cè)量傳感器坐標(biāo)系的方向。通過(guò)a算式,將遙測(cè)沖擊數(shù)據(jù)的數(shù)值和方向,變換到飛行器體坐標(biāo)系下;再通過(guò)b算式,結(jié)合三個(gè)仿真姿態(tài)角數(shù)據(jù),變換到飛行器體發(fā)射坐標(biāo)系下,最終結(jié)果如圖4、圖5所示(黑色箭頭為遙測(cè)沖擊數(shù)據(jù))。
實(shí)驗(yàn)結(jié)果顯示,方法實(shí)現(xiàn)了遙測(cè)數(shù)據(jù)在飛行器安裝位置上的可視化,可視結(jié)果隨飛行器位姿變化而同步變化,即實(shí)現(xiàn)了遙測(cè)數(shù)據(jù)與飛行器空間位姿數(shù)據(jù)的可視關(guān)聯(lián)。

圖4 t1時(shí)刻遙測(cè)數(shù)據(jù)與空間位姿可視關(guān)聯(lián)
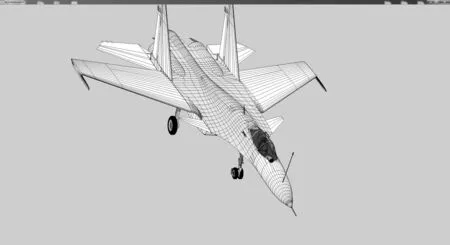
圖5 t2時(shí)刻遙測(cè)數(shù)據(jù)與空間位姿可視關(guān)聯(lián)
5 結(jié)語(yǔ)
本文提出了一種用于飛行器飛行試驗(yàn)遙測(cè)數(shù)據(jù)可視化的多源數(shù)據(jù)合成坐標(biāo)變換方法,該方法提出了飛行器體發(fā)射坐標(biāo)系的概念及相應(yīng)坐標(biāo)變換算式,通過(guò)坐標(biāo)變換技術(shù),在顯示飛行器姿態(tài)、位置的同時(shí),將遙測(cè)數(shù)據(jù)映射到對(duì)應(yīng)傳感器在飛行器上的安裝部位,實(shí)現(xiàn)了遙測(cè)數(shù)據(jù)與飛行器空間位置、姿態(tài)數(shù)據(jù)三類數(shù)據(jù)的可視關(guān)聯(lián)。
仿真實(shí)驗(yàn)表明,該方法支持的數(shù)據(jù)可視化,相比傳統(tǒng)的二維曲線方式,能顯著提升遙測(cè)數(shù)據(jù)可視化的信息綜合程度,全面反映指標(biāo)評(píng)估的關(guān)注數(shù)據(jù),支持試驗(yàn)結(jié)果分析評(píng)估工作的深入開(kāi)展。
猜你喜歡
北京測(cè)繪(2022年6期)2022-08-01 09:19:06
師道·教研(2022年1期)2022-03-12 05:46:47
云南化工(2021年8期)2021-12-21 06:37:54
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:30
當(dāng)代陜西(2021年17期)2021-11-06 03:21:36
北京測(cè)繪(2021年7期)2021-07-28 07:01:18
海洋信息技術(shù)與應(yīng)用(2020年1期)2020-06-11 12:43:56
當(dāng)代陜西(2019年15期)2019-09-02 01:52:00
傳媒評(píng)論(2019年4期)2019-07-13 05:49:14
學(xué)苑創(chuàng)造·A版(2018年11期)2018-02-01 06:29:20