點光源跟蹤系統的研究*
2019-09-03 07:23:26吳曉云
計算機與數字工程 2019年8期
吳曉云 馮 帆
(商洛學院電子信息與電氣工程學院 商洛 726000)
1 引言
在自動化技術高速發展的今天,光推動著人類的社會進步。如何快速地實現對太陽光的自動跟蹤,提高對光的有效利用是科研人員致力研究的方向,光源自動跟蹤技術也受到越來越多的關注[1~2]。因此本文提出一種點光源自動跟蹤系統的設計方案,此系統通過光敏三極管檢測光源信號,并判斷光源的位置,利用微處理器控制機械平臺轉動來實現對點光源的精確定位。
2 硬件設計
2.1 系統整體設計
硬件系統主要由光源發射部分、光源檢測部分和控制電路三部分組成,系統框圖如圖1所示,系統擬選用MSP430芯片作為微控制器,利用驅動芯片驅動LED產生一個方波信號,該信號的頻率為1kHz,LED燈所發出的光亮度在150mA~350mA,通過光敏三極管檢測亮度可調節的光源信號,從光敏三極管輸出的光敏信號經過放大電路放大后,再經過比較器后輸入MSP430芯片,經模數轉換和分析處理后,微控制器通過驅動模塊驅動步進電機帶動機械平臺轉動,從而實現光源的精確定位[3~4]。
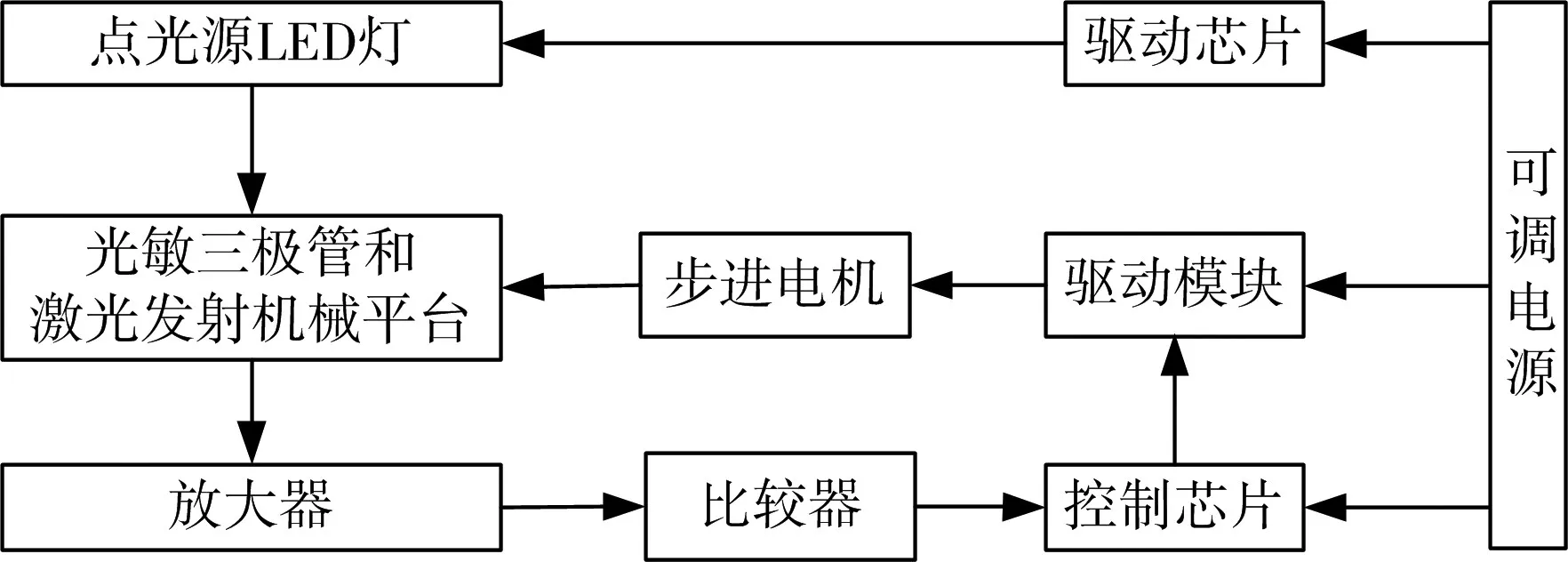
圖1 系統框圖
2.2 光源發射電路
光源發射電路為可控的恒流源電路,如圖2所示,電路的主控芯片是電壓可調的線性輸出穩壓芯片。輸出電壓 Vout=1.25·(1+R2/R1)+I*R2(V),其中1.25是ADJ引腳與VOUT引腳之間的電壓,I為ADJ引腳的輸出電流。流過LED的電流取決于輸出電壓VOUT,通過調節可調電阻R2調節輸出電流的大小[5]。
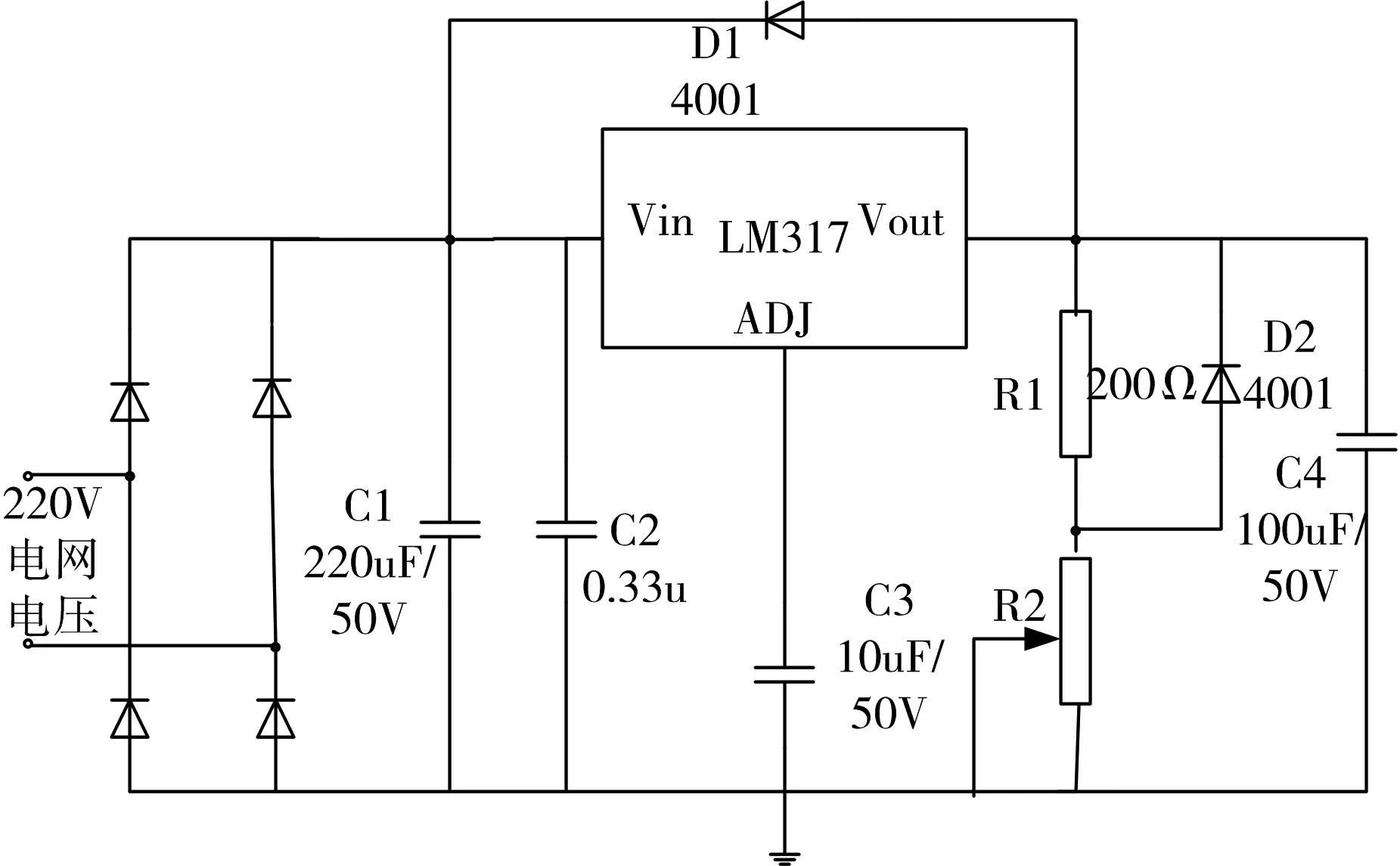
圖2 LED電流調節電路
2.3 光源檢測電路
檢測部分采用光敏三極管對點光源信號進行檢測,檢測靈敏度決定了光源跟蹤的精確度[6]。系統采用3個光敏三極管,在檢測線處形成“一”字排列,使光敏三極管采集到更多的點光源信號[7]。電路如圖3所示,通過光敏三極管將光源信號轉換為電信號,該輸出電信號通過TLC084集成運放放大后,電路中OPA820是一個電壓跟蹤器,起到跟蹤電壓的目的,將跟蹤器的輸出信號輸入到MSP430控制芯片的A/D引腳,經A/D轉換和分析處理后,最大值即為光源的位置[8]。
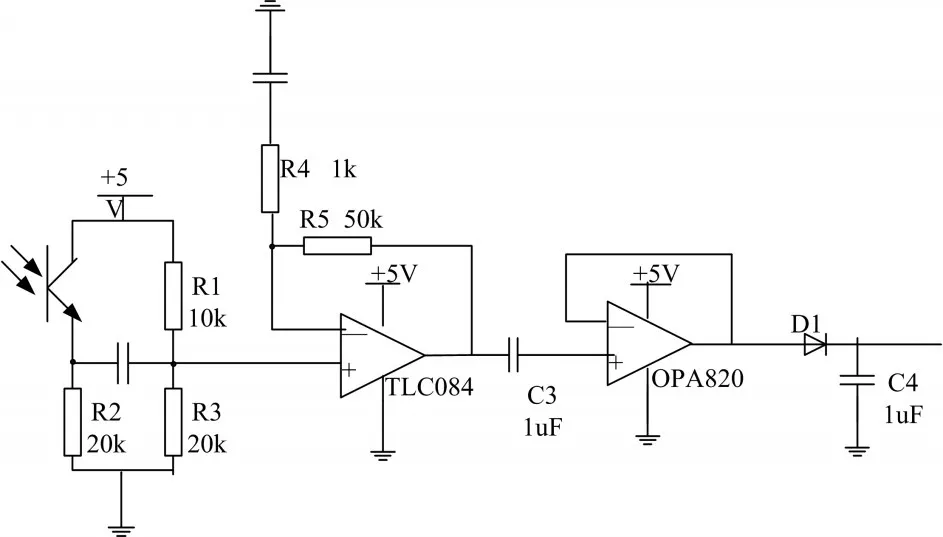
圖3 光源檢測電路
2.4 控制電路
電機驅動模塊電路如圖4所示。控制電路由電機驅動芯片L298、光電耦合器TLP521-4和TLP521-2組成。L298驅動芯片單片機控制端與L298 之間采用光耦隔離以減少信號干擾[9~10]。L298芯片驅動步進電機實現電機正反轉,ENA和ENB為使能端,分別通過引腳IN1、IN2和IN3、IN4控制兩個電機的正反轉,使得檢測部分能夠進行水平和豎直方向上對點光源檢測。
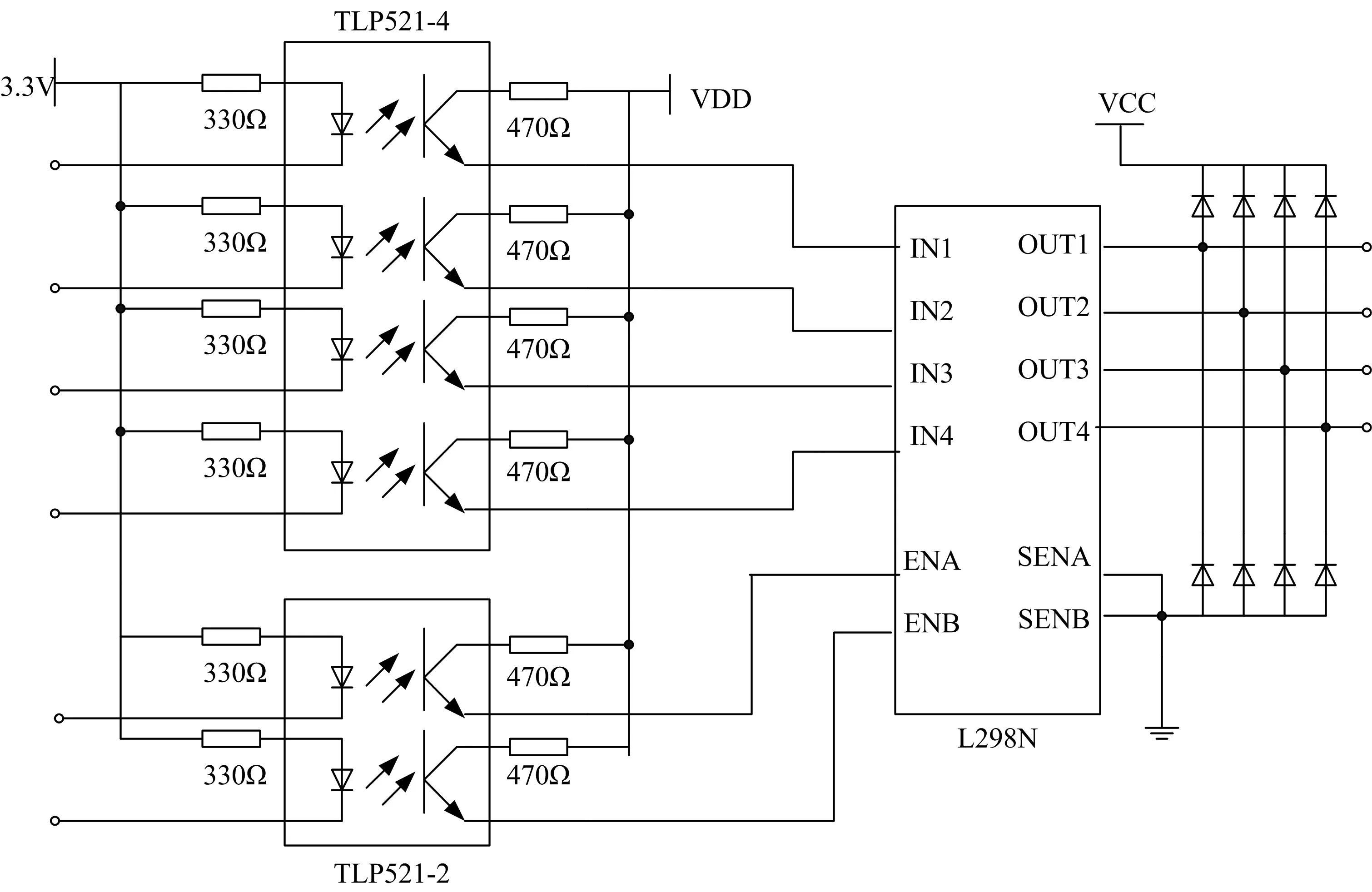
圖4 電機驅動模塊
3 軟件設計
系統程序流程圖如圖5所示,上電后首先將電機位置初始化,然后電機單向轉動并帶動光敏三極管掃描,在沒有掃描到點光源前一直進行掃描,電機以60步進行換向[11~12]。若掃描到點光源,則計算角度差,通過角度差控制電機轉動跟蹤到點光源后,電機就停止轉動。若沒有角度差,激光照射的點即為點光源的位置,電機停止轉動。
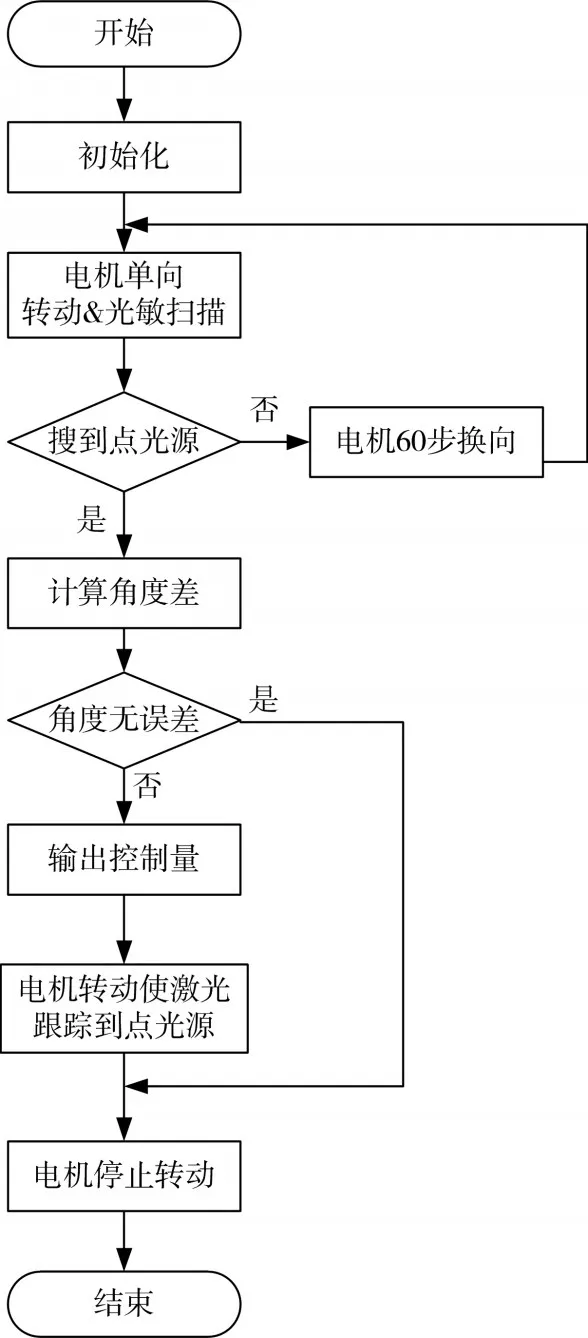
圖5 系統程序流程圖
4 系統測試
系統的測試數據如表1所示,通過調節點光源發射電路的R2阻值改變輸出電流的大小,系統都可以在較短的時間跟蹤到光源位置。光源的亮度越亮,跟蹤速度越快[13~14]。
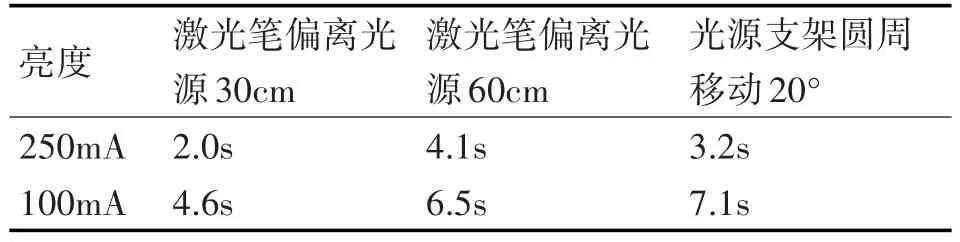
表1 測試數據
5 結語
本文選用MSP430芯片作為微控制器,采用LM317設計一個亮度可調節的點光源,通過光敏三極管檢測光照強度,結合軟件進行相關算法的運算控制,使激光筆快速而準確探尋光源的位置。經過測試,本系統完全實現了2m內的光源跟蹤及定位。整個系統中光敏三極管的布局和控制算法起到了重要的作用,當光源在移動時可對其實現實時跟蹤,所采用的算法具有較好的自適應性,該系統的研究對實現太陽能精確跟蹤控制的研究具有一定的參考價值[15]。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45