基于人工神經(jīng)網(wǎng)絡(luò)在線(xiàn)學(xué)習(xí)方法優(yōu)化磁屏蔽特性參數(shù)*
2019-08-27 06:55:56彭向凱吉經(jīng)緯李琳任偉項(xiàng)靜峰劉亢亢程鶴楠張鎮(zhèn)屈求智李唐劉亮呂德勝
物理學(xué)報(bào) 2019年13期
彭向凱 吉經(jīng)緯 李琳 任偉 項(xiàng)靜峰 劉亢亢 程鶴楠 張鎮(zhèn) 屈求智 李唐 劉亮? 呂德勝?
1)(中國(guó)科學(xué)院上海光學(xué)精密機(jī)械研究所,量子光學(xué)重點(diǎn)實(shí)驗(yàn)室,上海 201800)
2)(中國(guó)科學(xué)院大學(xué)材料與光電子研究中心,北京 100049)
1 引 言
由于原子在外磁場(chǎng)作用下的塞曼效應(yīng)導(dǎo)致原子能級(jí)分裂與頻移,使原子鐘、原子干涉儀以及冷原子重力儀等以原子作為傳感器的精密設(shè)備都會(huì)受環(huán)境磁場(chǎng)影響[1?5],在地面實(shí)驗(yàn)室環(huán)境中,主要是地磁場(chǎng)的影響.解決此問(wèn)題的通常做法是對(duì)待測(cè)原子樣品做多層磁屏蔽以降低環(huán)境磁場(chǎng)對(duì)屏蔽內(nèi)部原子的影響,磁屏蔽材料一般選用磁導(dǎo)率較高的坡莫合金鐵磁材料[6,7].但是對(duì)于繞地球飛行的星上設(shè)備來(lái)說(shuō),比如星載原子鐘與空間冷原子鐘,感受到的地磁場(chǎng)和地面實(shí)驗(yàn)室的很大不同之處在于衛(wèi)星會(huì)經(jīng)歷一個(gè)周期變化的磁場(chǎng)[8?10].例如對(duì)于搭載在“天宮二號(hào)”空間實(shí)驗(yàn)室的空間冷原子鐘來(lái)說(shuō),衛(wèi)星在近地約400 km的斜45°軌道運(yùn)行,經(jīng)歷磁場(chǎng)變化受衛(wèi)星繞地周期與地球自轉(zhuǎn)兩方面的影響,磁場(chǎng)隨時(shí)間變化近似于被20 d周期調(diào)幅的90 min周期正弦曲線(xiàn)[11].在這樣的環(huán)境磁場(chǎng)影響下,星上原子鐘磁屏蔽內(nèi)的原子樣品感受到的磁場(chǎng)不僅有被屏蔽衰減后的剩余磁場(chǎng),更嚴(yán)重的是有鐵磁材料在變化外場(chǎng)下被磁化產(chǎn)生的感應(yīng)交變磁場(chǎng).
如果能夠精確測(cè)量磁屏蔽內(nèi)感應(yīng)磁場(chǎng),可以通過(guò)洛倫茲線(xiàn)圈產(chǎn)生動(dòng)態(tài)補(bǔ)償磁場(chǎng)來(lái)有效消除變化外場(chǎng)的影響,由于磁場(chǎng)傳感器自身磁性對(duì)原子樣品會(huì)產(chǎn)生干擾,在靠近原子樣品的屏蔽內(nèi)放置磁場(chǎng)傳感器的方法并不適用,需要通過(guò)探測(cè)環(huán)境磁場(chǎng)來(lái)精確預(yù)測(cè)屏蔽內(nèi)感應(yīng)磁場(chǎng).磁屏蔽內(nèi)感應(yīng)磁場(chǎng)隨外磁場(chǎng)呈磁滯曲線(xiàn)變化,可以通過(guò)線(xiàn)性擬合或多項(xiàng)式擬合的方法近似預(yù)測(cè)[8,9],更精確的方法是使用Jiles-Atherton(J-A)磁滯模型[12?14],該模型是目前最為常用的描述鐵磁性材料磁滯特性的經(jīng)典數(shù)學(xué)模型,是一種具有物理基礎(chǔ)的現(xiàn)象學(xué)模型,能夠真實(shí)地描述磁屏蔽內(nèi)感應(yīng)磁場(chǎng)與外磁場(chǎng)的非線(xiàn)性關(guān)系,通過(guò)求解J-A磁滯模型方程便能夠得到較為準(zhǔn)確的磁滯回線(xiàn),從而根據(jù)探測(cè)到的環(huán)境磁場(chǎng)精確預(yù)測(cè)磁屏蔽內(nèi)感應(yīng)磁場(chǎng)
在J-A磁滯模型方程中,代表磁性材料特性的一組J-A參數(shù)是整個(gè)問(wèn)題的基礎(chǔ),目前還沒(méi)有一種快速、便捷、精確的方法對(duì)這一問(wèn)題進(jìn)行完整的解決,通常是在經(jīng)驗(yàn)值的基礎(chǔ)上根據(jù)特性磁場(chǎng)環(huán)境實(shí)驗(yàn)測(cè)試進(jìn)行擬合.機(jī)器學(xué)習(xí)技術(shù),尤其是依賴(lài)人工神經(jīng)網(wǎng)絡(luò)的深度學(xué)習(xí),有極其強(qiáng)大的擬合能力[15?17].同時(shí)使用在線(xiàn)學(xué)習(xí)的技術(shù),可以自動(dòng)尋找到最優(yōu)化的參數(shù)值[18?20].這個(gè)過(guò)程往往遠(yuǎn)快于人工調(diào)節(jié),并且結(jié)果往往優(yōu)于人工調(diào)節(jié).機(jī)器學(xué)習(xí)在線(xiàn)優(yōu)化技術(shù)已經(jīng)應(yīng)用于相當(dāng)多的量子實(shí)驗(yàn)中[21?25],而深度神經(jīng)網(wǎng)絡(luò)也已經(jīng)應(yīng)用于冷原子實(shí)驗(yàn)的磁光阱(magnetooptical trap,MOT)參數(shù)的優(yōu)化[26].之前也有研究利用神經(jīng)網(wǎng)絡(luò)結(jié)合遺傳算法通過(guò)離線(xiàn)學(xué)習(xí)對(duì)硅鋼片J-A參數(shù)進(jìn)行優(yōu)化擬合,其結(jié)果優(yōu)于利用解析模型的擬合[27,28].神經(jīng)網(wǎng)絡(luò)從數(shù)學(xué)模型角度可以看作對(duì)復(fù)雜函數(shù)的擬合,多參數(shù)擬合對(duì)人工計(jì)算是比較困難的工作,對(duì)于現(xiàn)在電腦來(lái)說(shuō)卻是非常簡(jiǎn)單的工作,參數(shù)越多這種差異越明顯.使用神經(jīng)網(wǎng)絡(luò),得益于電腦的運(yùn)算速度,即便數(shù)百個(gè)參數(shù)的擬合仍然可以快速準(zhǔn)確地完成,而對(duì)于人工來(lái)說(shuō)幾乎是不可能完成的.本文使用神經(jīng)網(wǎng)絡(luò)模型在線(xiàn)學(xué)習(xí)對(duì)JA參數(shù)進(jìn)行最優(yōu)化擬合,可以用更少的時(shí)間找到最優(yōu)參數(shù),并且應(yīng)用于大規(guī)模參數(shù)時(shí)具有更好的魯棒性[26].根據(jù)擬合的參數(shù),在模擬衛(wèi)星載荷感受地磁變化的情況下對(duì)磁屏蔽內(nèi)剩余磁場(chǎng)進(jìn)行補(bǔ)償,得到了優(yōu)于手動(dòng)參數(shù)擬合的結(jié)果.
2 將J-A模型應(yīng)用于磁屏蔽
為了將J-A模型應(yīng)用于磁屏蔽,我們將屏蔽內(nèi)的剩余磁場(chǎng)分為兩部分: 被磁屏蔽衰減后的環(huán)境磁場(chǎng)BSE以及磁屏蔽本身被磁化后產(chǎn)生的感應(yīng)磁場(chǎng)BM[29],因此有

第一項(xiàng)以磁屏蔽系數(shù)SE隨環(huán)境磁場(chǎng)線(xiàn)性變化;第二項(xiàng)與磁屏蔽的磁化強(qiáng)度成比例,可表示為BM=C×M,C為比例系數(shù),有和真空磁導(dǎo)率相同的量綱,單位為nT × m/A,在不同的位置有不同的取值,可以通過(guò)有限元仿真得到各個(gè)位置的取值.屏蔽內(nèi)剩余磁場(chǎng)由于BM的存在產(chǎn)生了磁滯回線(xiàn)的形狀.
使用J-A模型求磁屏蔽被環(huán)境磁場(chǎng)磁化后的磁化強(qiáng)度M,J-A模型由下式表示[30]:
其中He=μ0(H+αM)是J-A模型中的有效場(chǎng),μ0是真空磁導(dǎo)率,H為環(huán)境磁場(chǎng);Ms,k,a,a,c為J-A參數(shù),需要通過(guò)實(shí)測(cè)結(jié)果來(lái)確定.當(dāng) dH<0 時(shí)d=1,當(dāng) dH?0 時(shí)d=–1.
為了簡(jiǎn)化計(jì)算以及將來(lái)更方便地用于磁場(chǎng)補(bǔ)償系統(tǒng),我們對(duì)模型進(jìn)行了合理的簡(jiǎn)化.首先,磁疇耦合參數(shù)a在軟磁材料中影響很小[31],我們將軟磁材料a經(jīng)典值4 × 10–4與0值分別代入J-A模型計(jì)算屏蔽內(nèi)剩余磁場(chǎng),發(fā)現(xiàn)磁屏蔽內(nèi)剩余磁場(chǎng)計(jì)算值差別小于0.5 nT,并且a取0時(shí),積分方程可以解析求解展開(kāi)為多項(xiàng)式形式,這樣可以在結(jié)果影響很小的情況下極大地提高計(jì)算效率,便于軟件編程,這對(duì)于實(shí)現(xiàn)磁場(chǎng)的實(shí)時(shí)補(bǔ)償是很必要的.另外,當(dāng)He/a<0.1 時(shí),可以近似使用在空間磁場(chǎng)環(huán)境下,這個(gè)條件總是滿(mǎn)足的.基于上述簡(jiǎn)化,公式可以改寫(xiě)為

其中當(dāng)x> 0時(shí) [x]+=x,x≤ 0時(shí) [x]+=0.
此外,我們對(duì)環(huán)境磁場(chǎng)采集是離散值而非連續(xù)值,因此為了方便計(jì)算可以將公式中M(t)改寫(xiě)為M(Hn),即用當(dāng)前環(huán)境磁場(chǎng)狀態(tài)下的磁化強(qiáng)度表示當(dāng)前時(shí)刻的磁化強(qiáng)度,最終可以得到整個(gè)剩余磁場(chǎng)的表達(dá)式

在選擇最優(yōu)參數(shù)值的過(guò)程中,首先根據(jù)經(jīng)驗(yàn)值對(duì)參數(shù)進(jìn)行一些簡(jiǎn)化和范圍的限定,限定范圍首先可以確保得到的參數(shù)值具有合理的物理含義,并且可以更加迅速準(zhǔn)確地?cái)M合出參數(shù)值,同時(shí)又可以防止得到的參數(shù)值陷于局域最優(yōu)值而非全局最優(yōu)值.飽和磁化強(qiáng)度Ms可以根據(jù)坡莫合金的參數(shù)表得知在5.4× 105附近,我們將范圍限定于5 × 105—6 × 105.扎釘參數(shù)k近似等于矯頑力,可以根據(jù)參數(shù)表將范圍限定于1—50.可逆參數(shù)c的范圍根據(jù)定義限定于0—1.Langevin梯度參數(shù)a根據(jù)實(shí)測(cè)磁滯圖形可以限定于1.5 × 104—2.5 × 104.
在本次實(shí)驗(yàn)中,測(cè)試對(duì)象是單層磁屏蔽,對(duì)于更廣泛應(yīng)用的多層磁屏蔽來(lái)說(shuō),只需要將多層磁屏蔽當(dāng)作一個(gè)系統(tǒng),對(duì)該系統(tǒng)利用上述J-A方程分析,求解J-A參數(shù)、衰減系數(shù)SE和比例系數(shù)C,然后對(duì)屏蔽內(nèi)關(guān)心的位置展開(kāi)計(jì)算分析,就可以準(zhǔn)確計(jì)算屏蔽內(nèi)剩余磁場(chǎng).
3 實(shí)驗(yàn)測(cè)試裝置
為了模擬近地軌道的磁場(chǎng)環(huán)境,我們搭建了一個(gè)準(zhǔn)亥姆霍茲線(xiàn)圈,通過(guò)控制線(xiàn)圈電流來(lái)控制中心軸向磁場(chǎng).該裝置由三組八邊形線(xiàn)圈構(gòu)成(便于使用鋁型材搭建),線(xiàn)圈直徑約為1.3 m,整體高度約為1.5 m.我們將待測(cè)屏蔽筒置于線(xiàn)圈內(nèi)部處,屏蔽筒直徑為30 cm,高度為80 cm,并在屏蔽筒內(nèi)部中心位置放置一個(gè)磁通門(mén)用于采集屏蔽內(nèi)磁場(chǎng),在線(xiàn)圈軸線(xiàn)遠(yuǎn)離屏蔽筒處放置另一個(gè)磁通門(mén)用于采集環(huán)境磁場(chǎng).圖1(a)是整個(gè)測(cè)試系統(tǒng)的示意圖,F1和F2分別為探測(cè)環(huán)境磁場(chǎng)和屏蔽內(nèi)部磁場(chǎng)的磁通門(mén).圖1(b)是用于模擬近地軌道磁場(chǎng)的環(huán)境磁場(chǎng)變化圖.實(shí)驗(yàn)過(guò)程中,首先讓線(xiàn)圈電流產(chǎn)生正弦變化的環(huán)境磁場(chǎng),根據(jù)得到的磁滯回線(xiàn)作為神經(jīng)網(wǎng)絡(luò)訓(xùn)練與反饋的值來(lái)獲得屏蔽筒J-A參數(shù),并將這組參數(shù)用于預(yù)測(cè)近地軌道環(huán)境磁場(chǎng)條件下的屏蔽內(nèi)磁場(chǎng),將預(yù)測(cè)值和實(shí)測(cè)結(jié)果進(jìn)行對(duì)比,驗(yàn)證神經(jīng)網(wǎng)絡(luò)算法預(yù)測(cè)J-A參數(shù)的準(zhǔn)確性.
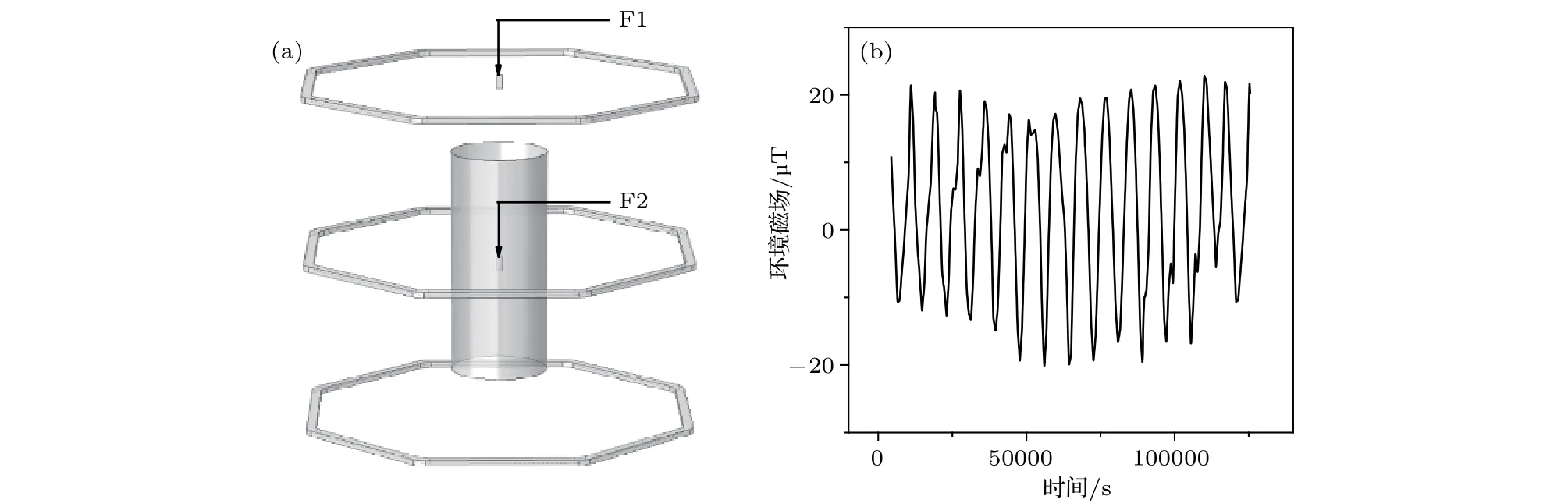
圖1 (a)實(shí)驗(yàn)裝置示意圖,同時(shí)也是有限元仿真時(shí)所用的模型圖;(b)對(duì)模型進(jìn)行測(cè)試所用的近地軌道環(huán)境磁場(chǎng)Fig.1.(a)The schematic diagram of the experimental device and also the model diagram used in our finite element simulation;(b)low Earth orbit environmental magnetic field used to test the model.
在利用神經(jīng)網(wǎng)絡(luò)對(duì)J-A參數(shù)優(yōu)化之前,除了預(yù)先設(shè)定參數(shù)范圍外,預(yù)測(cè)屏蔽內(nèi)磁場(chǎng)還需要知道屏蔽筒內(nèi)各處衰減系數(shù)SE和磁化強(qiáng)度與磁場(chǎng)之間的比例系數(shù)C,我們使用有限元分析方法(finite element method,FEM)[31]仿真屏蔽筒內(nèi)空間各處的衰減系數(shù)SE和比例系數(shù)C優(yōu)化前的初始值.圖2展示了屏蔽內(nèi)部一個(gè)縱向截面上有限元計(jì)算所得的SE和C.我們探測(cè)所用磁通門(mén)置于屏蔽最中心處,在此處的衰減系數(shù)約為31,比例系數(shù)約為–1.8.使用其他方法獲得J-A參數(shù)時(shí),這兩項(xiàng)參數(shù)一般都僅僅使用仿真值,雖然有限元模型可能存在的各種誤差,但是往往因多參數(shù)之間關(guān)系復(fù)雜不對(duì)這兩個(gè)參數(shù)進(jìn)行調(diào)節(jié).而使用神經(jīng)網(wǎng)絡(luò)自動(dòng)調(diào)節(jié)參數(shù)時(shí),由于神經(jīng)網(wǎng)絡(luò)具有強(qiáng)大的仿真計(jì)算能力,我們將這兩個(gè)參數(shù)也作為代求參數(shù).對(duì)SE進(jìn)行有限元仿真時(shí),選擇了廠(chǎng)家給出的相對(duì)磁導(dǎo)率,實(shí)際上磁導(dǎo)率可能無(wú)法嚴(yán)格等于廠(chǎng)家給出的參數(shù),并且屏蔽效果可能由于形變等原因與仿真結(jié)果有一定偏差,因此我們根據(jù)仿真結(jié)果31,將范圍限定于20—40.對(duì)C進(jìn)行有限元仿真時(shí),我們將磁屏蔽看作永磁體,設(shè)置磁化強(qiáng)度,能夠得到空間中不同位置的感應(yīng)磁場(chǎng),從而計(jì)算比例系數(shù).同樣,由于形變、位置偏差等一些原因,實(shí)際結(jié)果可能也會(huì)和仿真結(jié)果有偏差,因此根據(jù)有限元仿真結(jié)果–1.8,因此我們將范圍限定于–1.5—–2.5.
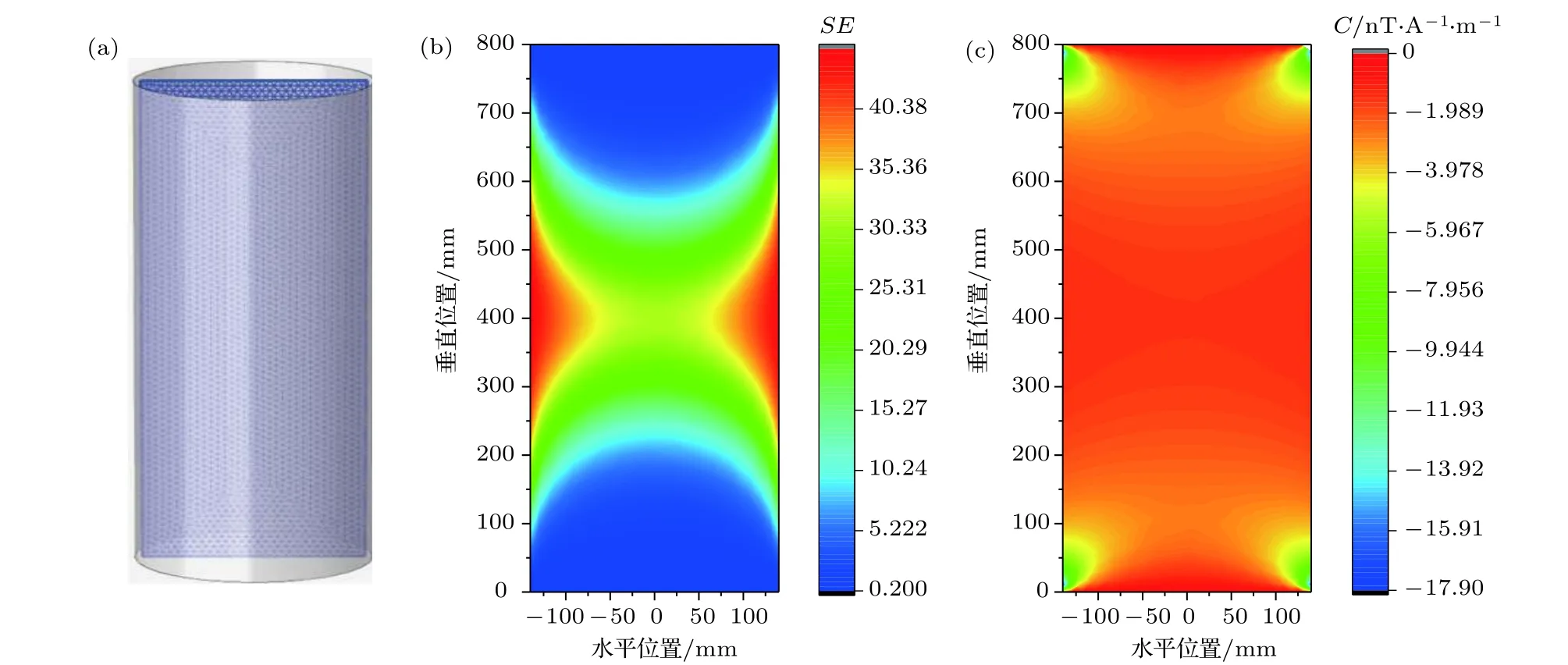
圖2 (a)數(shù)據(jù)所在磁屏蔽筒截面示意圖;(b)有限元仿真所得到屏蔽內(nèi)一個(gè)截面上的屏蔽效率分布圖;(c)有限元仿真得到的屏蔽內(nèi)一個(gè)截面上的磁化強(qiáng)度比例系數(shù)圖Fig.2.(a)A schematic view of the section of the data;(b)the shielding efficiency distribution on a section inside the shield calculated by FEM software;(c)the magnetization intensity ratio coefficient on a section of the shield calculated by FEM software.
4 神經(jīng)網(wǎng)絡(luò)模型的建立
本文需要優(yōu)化的是J-A模型中的5個(gè)參數(shù)Ms,k,a,a,c和衰減系數(shù)SE以及比例系數(shù)C共7個(gè)參數(shù).我們建立如圖3的參數(shù)優(yōu)化神經(jīng)網(wǎng)絡(luò).
在圖3中,神經(jīng)網(wǎng)絡(luò)作為一個(gè)復(fù)雜的函數(shù),我們給定輸入?yún)?shù)值,圖中x1,x2,···,x7對(duì)應(yīng)J-A模型中的5個(gè)參數(shù)Ms,k,a,a,c和衰減系數(shù)SE以及比例系數(shù)C,每一組參數(shù)可通過(guò)神經(jīng)網(wǎng)絡(luò)對(duì)應(yīng)一個(gè)輸出值y,同樣的參數(shù)值,在給定環(huán)境磁場(chǎng)的情況下,代入(4)和(5)式,可以算出相應(yīng)的剩余磁場(chǎng),并和實(shí)測(cè)的剩余磁場(chǎng)相減后求標(biāo)準(zhǔn)差y0,我們使用神經(jīng)網(wǎng)絡(luò)這樣一個(gè)通用的函數(shù)形式來(lái)擬合這個(gè)參數(shù)值到標(biāo)準(zhǔn)差的復(fù)雜過(guò)程,一旦完成擬合,使用scipy庫(kù)[32]可以方便求出令輸出值即標(biāo)準(zhǔn)差最小的參數(shù)值.此外我們使用了在線(xiàn)學(xué)習(xí)的方法,視情況將預(yù)測(cè)的參數(shù)值重新代到神經(jīng)網(wǎng)絡(luò)中進(jìn)行訓(xùn)練,這樣可以充分利用每組參數(shù),用盡可能少的輪次擬合出最準(zhǔn)確的神經(jīng)網(wǎng)絡(luò).
神經(jīng)網(wǎng)絡(luò)模型建立過(guò)程中,網(wǎng)絡(luò)層數(shù)與每層的神經(jīng)元數(shù)是首先需要考慮的問(wèn)題[15].神經(jīng)網(wǎng)絡(luò)層數(shù)以及神經(jīng)元數(shù)量會(huì)影響神經(jīng)網(wǎng)絡(luò)的性能,如果層數(shù)較少,或者神經(jīng)元數(shù)量較少,可能會(huì)導(dǎo)致無(wú)法擬合出復(fù)雜的對(duì)應(yīng)關(guān)系(欠擬合),如果層數(shù)較多,或者神經(jīng)元數(shù)量較多,有可能會(huì)將原本簡(jiǎn)單的關(guān)系擬合復(fù)雜(過(guò)擬合).神經(jīng)元數(shù)量依慣例通常選用2的次方個(gè),我們嘗試過(guò)64個(gè)神經(jīng)元,以及3層或4層網(wǎng)絡(luò),結(jié)果顯示出明顯的過(guò)擬合,即預(yù)測(cè)最優(yōu)參數(shù)的標(biāo)準(zhǔn)差起伏很大且不理想,如圖4(b)所示.我們同時(shí)也嘗試過(guò)16個(gè)神經(jīng)元,2層網(wǎng)絡(luò),結(jié)果顯示出明顯的欠擬合(所需輪次較多,且調(diào)參結(jié)果沒(méi)有32個(gè)神經(jīng)元結(jié)果好).綜合上述實(shí)驗(yàn),我們認(rèn)為選用2層,每層32個(gè)神經(jīng)元,對(duì)于我們這個(gè)只有7個(gè)饋入節(jié)點(diǎn)的神經(jīng)網(wǎng)絡(luò)來(lái)說(shuō)是比較合適的,如圖4(a)所示.隨著參數(shù)的增加,我們需要增加神經(jīng)元以及神經(jīng)網(wǎng)絡(luò)層數(shù),具體所需數(shù)量還要根據(jù)實(shí)驗(yàn)來(lái)確定.
首先隨機(jī)選擇12組參數(shù)并求得相應(yīng)的標(biāo)準(zhǔn)差對(duì)神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,梯度下降方法使用Adam方法,每一層的激活函數(shù)選用Relu函數(shù),訓(xùn)練輪次為500次,完全在線(xiàn)學(xué)習(xí),批量選為1.根據(jù)訓(xùn)練得到的神經(jīng)網(wǎng)絡(luò),使用L-BFGS-B方法預(yù)測(cè)當(dāng)前最優(yōu)參數(shù)值[33],為了防止參數(shù)陷于可能的局部最優(yōu)值而非全局最優(yōu)值,我們對(duì)每一組預(yù)測(cè)最優(yōu)值增加一個(gè)很小的隨機(jī)偏置量,并將求得的標(biāo)準(zhǔn)差代入神經(jīng)網(wǎng)絡(luò)繼續(xù)進(jìn)行100輪次的訓(xùn)練.此外,若連續(xù)5次預(yù)測(cè)得到的標(biāo)準(zhǔn)差均大于之前得到的最優(yōu)值的標(biāo)準(zhǔn)差,將重新完全隨機(jī)選擇下一組參數(shù)值,以求跳出局部最優(yōu)值.訓(xùn)練過(guò)程持續(xù)到得到一個(gè)優(yōu)于預(yù)期最低標(biāo)準(zhǔn)差的值或者到達(dá)最大循環(huán)次數(shù)或者連續(xù)20次預(yù)測(cè)值沒(méi)有優(yōu)于之前的最優(yōu)值.流程圖如圖5所示,圖中只顯示了一個(gè)結(jié)束條件.
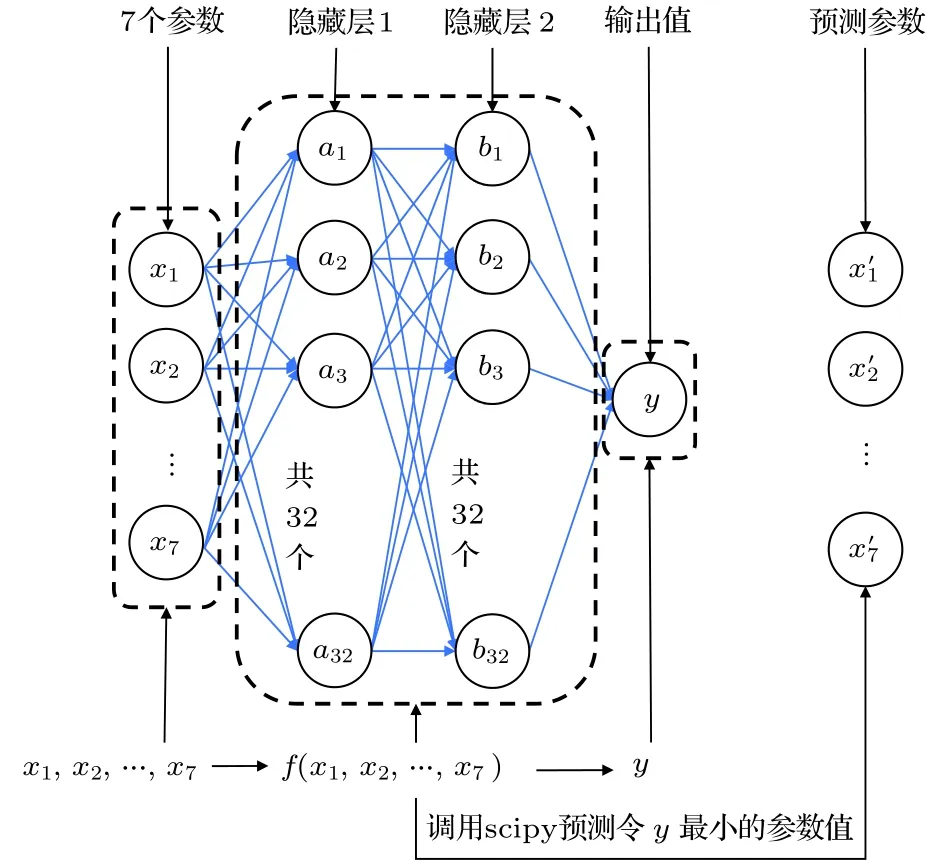
圖3 神經(jīng)網(wǎng)絡(luò)調(diào)參原理示意圖 使用2個(gè)隱藏層的全連接神經(jīng)網(wǎng)絡(luò),每層32個(gè)神經(jīng)元,一旦神經(jīng)網(wǎng)絡(luò)訓(xùn)練完成,就能調(diào)用scipy庫(kù)預(yù)測(cè)最優(yōu)參數(shù)Fig.3.Principle of optimizing with neural network.We use 2 hidden layers of full connected neural network,32 neurons per layer.Once the neural network training is completed,we can use scipy to predict the optimal parameters.
由于注入值較少,選用了一個(gè)兩層的的神經(jīng)網(wǎng)絡(luò),因此網(wǎng)絡(luò)訓(xùn)練時(shí)間很短,預(yù)測(cè)最優(yōu)參數(shù)也很快,每組參數(shù)求標(biāo)準(zhǔn)差每組需要約2 s,求得一組理想?yún)?shù)大約僅需要3 min.我們使用keras[34]建立神經(jīng)網(wǎng)絡(luò),使用scipy調(diào)用L-BFGS-B方法進(jìn)行最優(yōu)參數(shù)的預(yù)測(cè).相比神經(jīng)網(wǎng)絡(luò)對(duì)參數(shù)擬合,我們利用人工僅對(duì)J-A模型中的5個(gè)參數(shù)進(jìn)行優(yōu)化擬合,一般情況也需要幾個(gè)小時(shí).
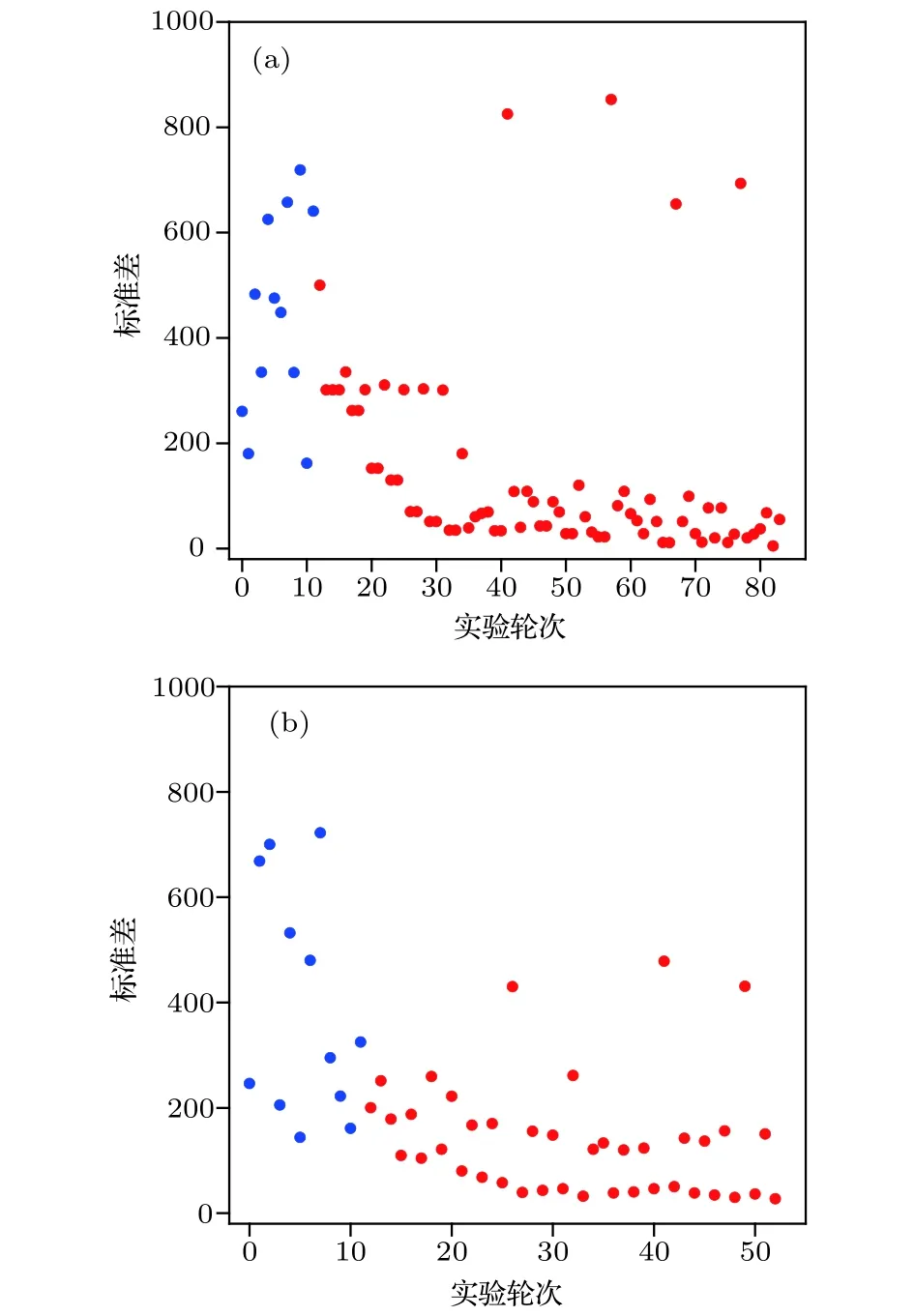
圖4 (a)當(dāng)選用2層網(wǎng)絡(luò)各32個(gè)神經(jīng)元時(shí),預(yù)測(cè)標(biāo)準(zhǔn)差收斂性好且最小值僅為4.9;(b)當(dāng)選用3層網(wǎng)絡(luò)各64個(gè)神經(jīng)元時(shí),由于過(guò)擬合預(yù)測(cè)標(biāo)準(zhǔn)差振蕩且最小值為27Fig.4.(a)When 32 neurons of the 2 layers network are selected,the convergence of the prediction standard deviation is good and the minimum value is only 4.9;(b)when 64 neurons of the 3 layers network are selected,the convergence of the prediction standard deviation is poor because of over-fit and the minimum value is 27.
5 參數(shù)優(yōu)化結(jié)果與驗(yàn)證
使用神經(jīng)網(wǎng)絡(luò)調(diào)參的結(jié)果如圖6所示,首先用一個(gè)正弦變化的環(huán)境磁場(chǎng)進(jìn)行調(diào)參.圖6(a)橫坐標(biāo)為總循環(huán)次數(shù),縱坐標(biāo)為我們?cè)O(shè)定的標(biāo)準(zhǔn)差,藍(lán)色點(diǎn)為初始隨機(jī)地用于訓(xùn)練神經(jīng)元的12組參數(shù),可見(jiàn)在第20輪左右,即初始訓(xùn)練后預(yù)測(cè)的第8組參數(shù)就已經(jīng)開(kāi)始明顯收斂于最優(yōu)值,最終得到的JA參數(shù)為Ms=540074,c=0.58,a=19817,k=9.50,SE=36.37,C=-2.37.標(biāo)準(zhǔn)差值為4.90,在該組參數(shù)下計(jì)算得到的磁滯回線(xiàn)和實(shí)測(cè)值如圖6(b)所示,紅線(xiàn)為預(yù)測(cè)值黑線(xiàn)為實(shí)測(cè)值.
相應(yīng)地,當(dāng)我們手動(dòng)調(diào)節(jié)參數(shù)時(shí),根據(jù)參數(shù)表確定Ms=540000,并根據(jù)有限元仿真結(jié)果確定SE=31,C=–1.8.在此基礎(chǔ)上調(diào)整k,c和a,根據(jù)經(jīng)驗(yàn)觀(guān)察,a和幅值關(guān)聯(lián)較大,k與c和磁滯程度關(guān)聯(lián)較大,經(jīng)歷長(zhǎng)時(shí)間反復(fù)調(diào)節(jié)之后,得到的最優(yōu)的標(biāo)準(zhǔn)差值為7.09,在此時(shí)實(shí)測(cè)和預(yù)測(cè)的磁滯回線(xiàn)的形狀仍然高度重合,很難進(jìn)一步調(diào)節(jié),然而手工調(diào)參和神經(jīng)網(wǎng)絡(luò)調(diào)參的標(biāo)準(zhǔn)差相差了接近一倍,意味著仍有很大的可調(diào)空間.顯然使用神經(jīng)網(wǎng)絡(luò)自動(dòng)調(diào)參,節(jié)省了工作量,節(jié)約了大量時(shí)間,同時(shí)得到了更加準(zhǔn)確的參數(shù).另外,最優(yōu)參數(shù)得到的SE和C的取值與有限元結(jié)果的差異,提示了可能存在于有限元仿真過(guò)程中的誤差,因素可能是材料磁導(dǎo)率的理論值和實(shí)際值的偏差、模型和實(shí)際屏蔽結(jié)構(gòu)誤差等.表1顯示了手動(dòng)和自動(dòng)方法獲得參數(shù)的對(duì)比.
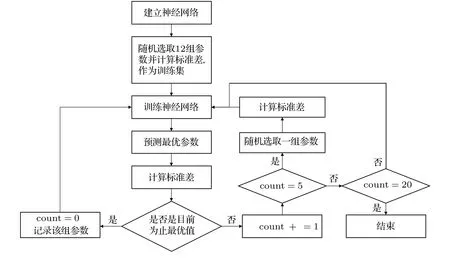
圖5 自動(dòng)調(diào)參的流程圖Fig.5.The flow chart of optimizing magnetic shielding characteristic parameters.
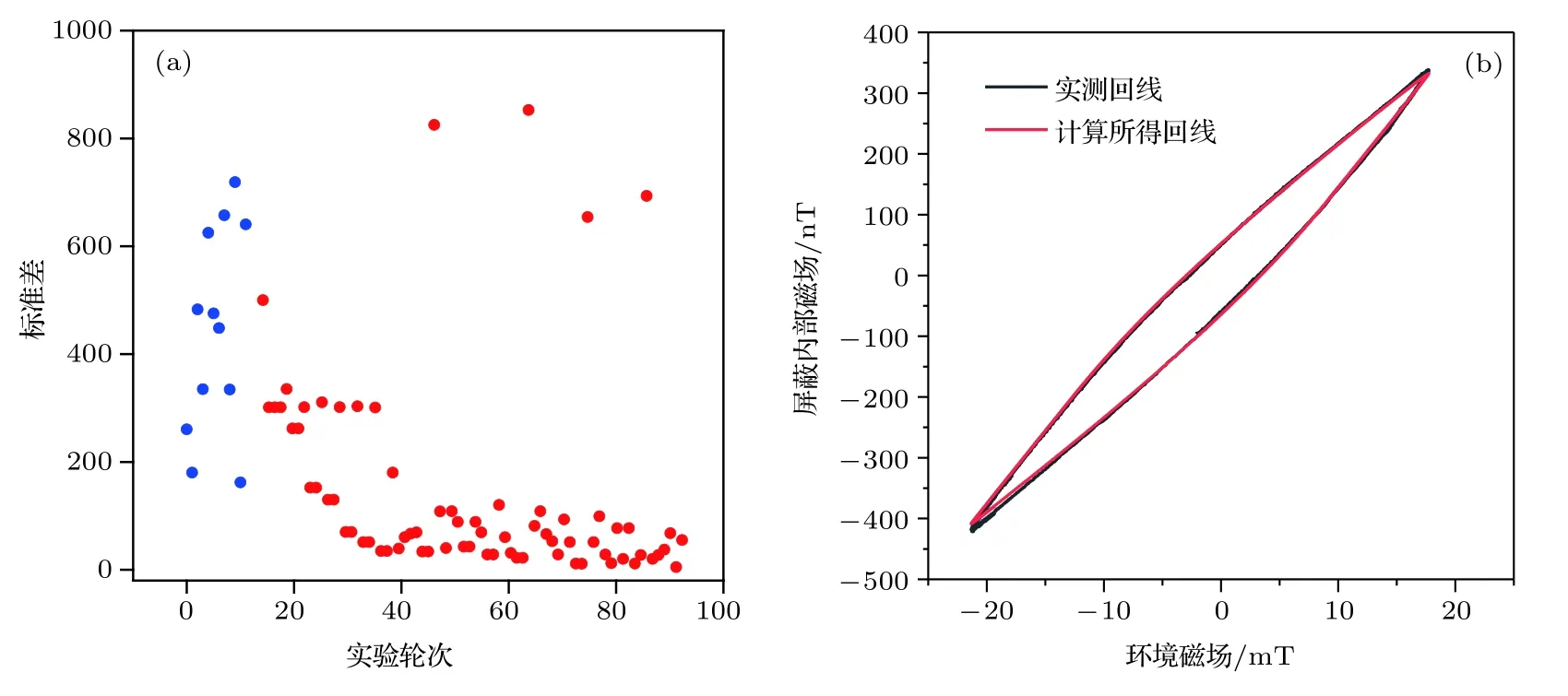
圖6 (a)一個(gè)典型的求參過(guò)程圖,預(yù)測(cè)參數(shù)值的標(biāo)準(zhǔn)差隨實(shí)驗(yàn)輪次逐漸降低;(b)相應(yīng)參數(shù)計(jì)算得到的磁滯回線(xiàn)與實(shí)測(cè)回線(xiàn)的比較Fig.6.(a)A typical continuation process graph,the standard deviation of the predicted parameter values is gradually reduced with the experimental round;(b)comparison of hysteresis loop and measured loop calculated by corresponding parameters.
另外,初始隨機(jī)參數(shù)的不同可能導(dǎo)致不同的預(yù)測(cè)速度,但通常都能夠收斂到理想的參數(shù)點(diǎn).圖7展示了另兩組初始隨機(jī)參數(shù)進(jìn)行預(yù)測(cè)的標(biāo)準(zhǔn)差和循環(huán)輪次圖,同樣藍(lán)色點(diǎn)為初始隨機(jī)的用于訓(xùn)練神經(jīng)元的12組參數(shù),可以看出由于初始隨機(jī)值不同,在本次訓(xùn)練中更快達(dá)到了標(biāo)準(zhǔn)差小于5的期望值.
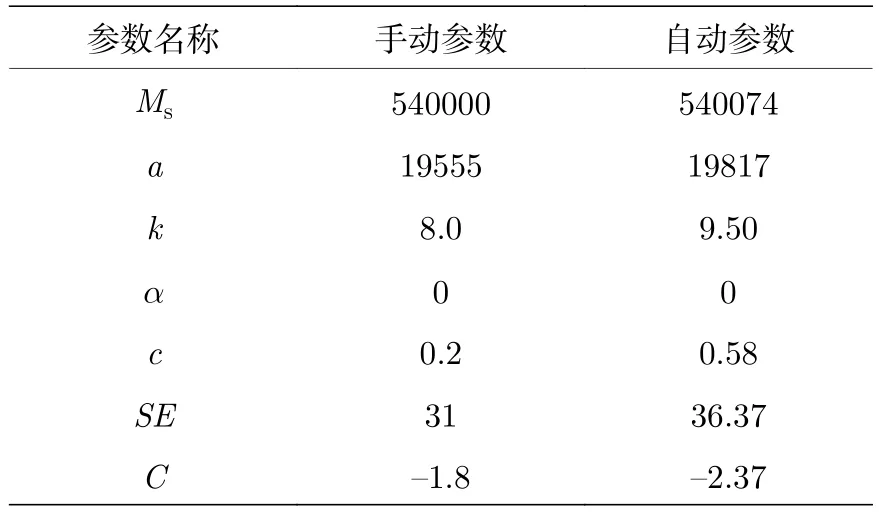
表1 手動(dòng)調(diào)參和自動(dòng)調(diào)參得到的參數(shù)值Table 1.Parameter values obtained by manual tuning and automatic tuning.
接著將該組參數(shù)應(yīng)用于接近實(shí)際衛(wèi)星在軌經(jīng)歷的環(huán)境磁場(chǎng),得到的結(jié)果如圖8所示.圖8(a)和圖8(b)分別是在環(huán)境磁場(chǎng)隨時(shí)間變化情況下,利用使用神經(jīng)網(wǎng)絡(luò)調(diào)參后得到的參數(shù)來(lái)計(jì)算屏蔽內(nèi)磁場(chǎng)和實(shí)測(cè)屏蔽內(nèi)磁場(chǎng)的對(duì)比圖,橫坐標(biāo)分別為時(shí)間和環(huán)境磁場(chǎng); 圖8(c)表示計(jì)算值和實(shí)測(cè)值的差值隨時(shí)間變化曲線(xiàn); 圖8(d)表示計(jì)算值和實(shí)測(cè)值的差值隨環(huán)境磁場(chǎng)變化曲線(xiàn).圖中標(biāo)準(zhǔn)差越小說(shuō)明計(jì)算越準(zhǔn)確.其中黑線(xiàn)是僅考慮衰減項(xiàng)BSE不考慮磁化項(xiàng)BM的計(jì)算結(jié)果差值,另外兩組則分別用手動(dòng)得到的參數(shù)和神經(jīng)網(wǎng)絡(luò)得到的參數(shù)來(lái)計(jì)算,其中手動(dòng)找到的參數(shù)標(biāo)準(zhǔn)差為9.33,神經(jīng)網(wǎng)絡(luò)調(diào)參標(biāo)準(zhǔn)差為7.01.可見(jiàn)使用J-A模型計(jì)算屏蔽內(nèi)參數(shù)是非常必要的,僅考慮衰減項(xiàng)而忽略磁滯項(xiàng)將會(huì)導(dǎo)致很大誤差,另外利用神經(jīng)網(wǎng)絡(luò)獲取J-A模型的參數(shù)比手動(dòng)參數(shù)更加快速準(zhǔn)確,為我們對(duì)空間鐘磁屏蔽補(bǔ)償參數(shù)的選擇提供了有效的幫助.
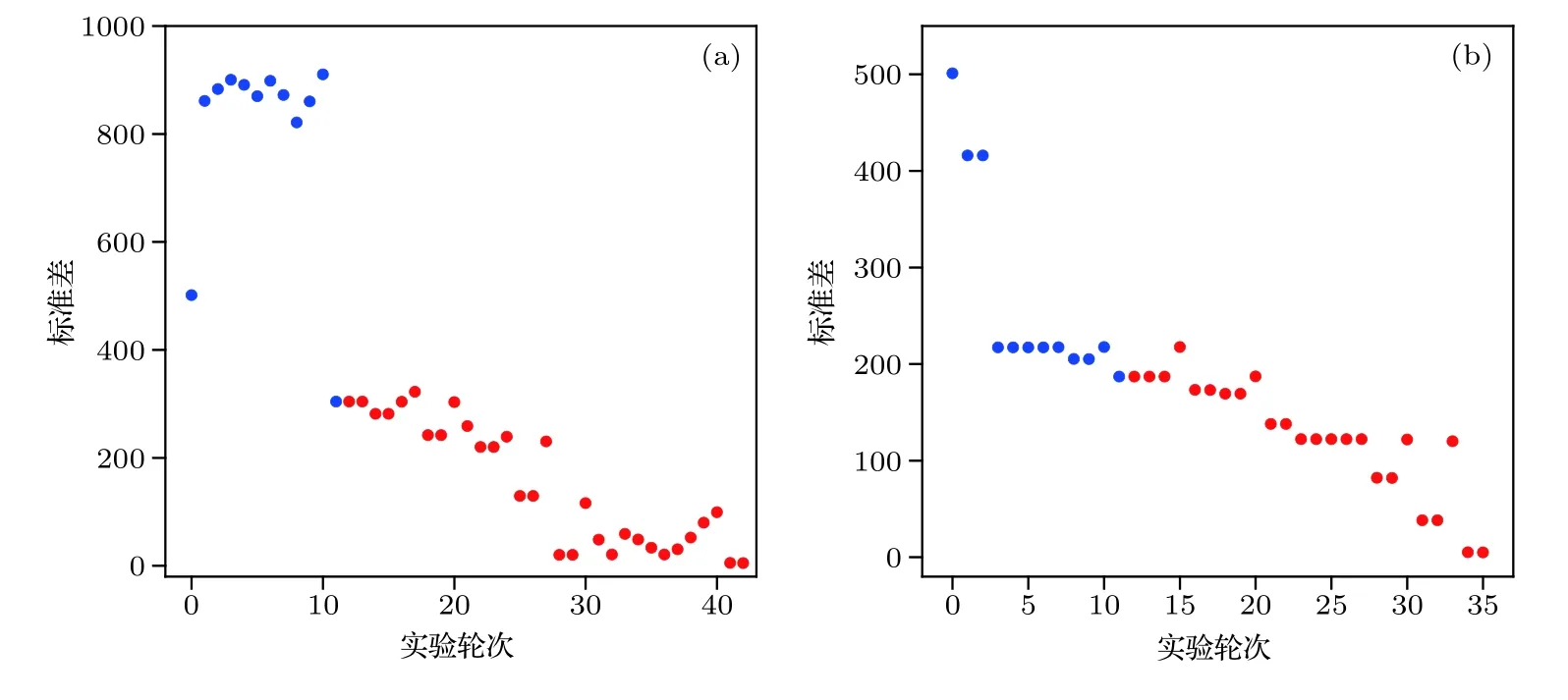
圖7 另外兩組不同隨機(jī)初始訓(xùn)練參數(shù)下,標(biāo)準(zhǔn)差隨實(shí)驗(yàn)輪次的收斂圖Fig.7.Convergence graph of standard deviation with experimental rounds under two different random initial training parameters.
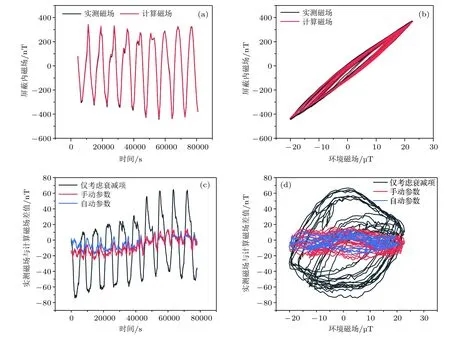
圖8 在近地軌道磁場(chǎng)環(huán)境下實(shí)測(cè)磁場(chǎng)與計(jì)算磁場(chǎng)的對(duì)比圖(a)橫坐標(biāo)為時(shí)間;(b)橫坐標(biāo)為環(huán)境磁場(chǎng);(c)使用手動(dòng)調(diào)節(jié)參數(shù),自動(dòng)求得的參數(shù),以及僅考慮衰減項(xiàng)不考慮磁化項(xiàng),計(jì)算磁場(chǎng)與實(shí)測(cè)磁場(chǎng)的差值,橫坐標(biāo)為時(shí)間;(d)橫坐標(biāo)為環(huán)境磁場(chǎng)Fig.8.A comparison of the measured magnetic field with the calculated magnetic field in a near-Earth orbit magnetic field environment;(a)The x axis is time;(b)the x-axis is the ambient magnetic field;(c)use manual adjustment parameters,automatically obtained parameters,and simple BSE to calculate the difference between the magnetic field and the measured magnetic field,the abscissa is time;(d)the x-axis is the ambient magnetic field.
6 結(jié) 論
基于描述鐵磁材料磁滯特性的J-A模型,我們對(duì)坡莫合金磁屏蔽裝置在變化外磁場(chǎng)情況下屏蔽筒內(nèi)磁場(chǎng)進(jìn)行預(yù)測(cè).結(jié)合有限元模型對(duì)磁屏蔽特性的初步分析,使用神經(jīng)網(wǎng)絡(luò)在線(xiàn)學(xué)習(xí)的方法以獲得磁屏蔽的J-A參數(shù)與屏蔽特性的最優(yōu)值,并模擬通過(guò)低軌衛(wèi)星經(jīng)歷的地磁場(chǎng)情況下驗(yàn)證擬合參數(shù)的準(zhǔn)確性.擬合結(jié)果與實(shí)驗(yàn)測(cè)試表明,使用簡(jiǎn)單的兩層神經(jīng)網(wǎng)絡(luò)就可以高效、快速地獲得超過(guò)手工調(diào)節(jié)精度的J-A參數(shù).一方面通過(guò)該方法對(duì)磁屏蔽特性的精確測(cè)定,可以應(yīng)用于在軌運(yùn)行的高精度磁敏感衛(wèi)星載荷,通過(guò)在軌磁場(chǎng)補(bǔ)償?shù)拇胧?獲得更好的磁屏蔽效果; 另一方面驗(yàn)證了神經(jīng)網(wǎng)絡(luò)應(yīng)用于空間冷原子鐘相關(guān)系統(tǒng)參數(shù)調(diào)整的可行性.該方法從理論上擴(kuò)展了目前對(duì)于多參數(shù)擬合優(yōu)化的工具,對(duì)于實(shí)際應(yīng)用中通常會(huì)遇到的多參數(shù)物理實(shí)驗(yàn)尋找系統(tǒng)最優(yōu)解會(huì)有很大幫助.例如可以應(yīng)用于類(lèi)似復(fù)雜系統(tǒng)的調(diào)參工作,對(duì)冷原子實(shí)驗(yàn)中與多個(gè)光功率、頻率、時(shí)序相關(guān)的冷原子數(shù)目和冷原子溫度進(jìn)行優(yōu)化[35,36],相關(guān)參數(shù)往往有數(shù)百個(gè)之多,受限于在軌運(yùn)行時(shí)資源,人工調(diào)節(jié)幾乎沒(méi)有可能找到最優(yōu)參數(shù).我們希望神經(jīng)網(wǎng)絡(luò)的應(yīng)用能夠幫助優(yōu)化空間冷原子鐘的性能,并且實(shí)際最優(yōu)參數(shù)與理論最優(yōu)參數(shù)的差別有可能幫助我們進(jìn)一步反思微重力條件下原子冷卻的物理機(jī)制.
猜你喜歡
當(dāng)代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂(lè)園·綜合智能(2021年12期)2022-01-18 05:46:42
中老年保健(2021年12期)2021-08-24 03:30:40
中國(guó)傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
中國(guó)生殖健康(2020年6期)2020-02-01 06:28:50
中國(guó)生殖健康(2019年11期)2019-01-07 01:28:02
中學(xué)生數(shù)理化·高二版(2016年12期)2017-02-28 10:08:42
Coco薇(2016年1期)2016-01-11 16:53:24
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開(kāi)發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24