高光譜圖像序列中的運動弱小目標檢測*
2019-08-06 11:13:00王津申王清峰
飛控與探測 2019年3期
關鍵詞:檢測
王津申,李 陽,王清峰,鮮 寧
(1.北京航空航天大學 宇航學院·北京·100083; 2.上海航天控制技術研究所·上海·201109;3.北京航空航天大學 科學技術研究院·北京·100083)
0 引 言
近年來,人工智能在航天器控制領域得到了廣泛的應用[1],其中使用人工智能處理遙感圖像已成為一種非常常見的方法。弱小運動目標檢測在軍事和民用領域中的應用得到了研究人員的廣泛關注。在遙感圖像的軍事應用中,目標雖然弱小,但對感興趣的目標進行檢測和跟蹤是必要的。然而,由于復雜的背景、噪聲雜波和長距離傳輸后的信號衰減等原因,感興趣的目標的信噪比往往很低。基于以上原因,我們很難從單一寬波段紅外圖像序列中獲得足夠清晰的運動目標的檢測結果[2]。
隨著高光譜傳感器的發展,高光譜圖像已經被應用于處理許多經典的圖像問題。高光譜傳感器能夠同時在空間域和頻譜域獲取高分辨率信息,這是高光譜傳感器相對于單一寬波段紅外傳感器的重要優勢。高光譜圖像在目標檢測領域已經取得了大量的研究成果。目標檢測的任務是在高光譜數據立方體的像素中搜索特定目標,該目標的大小往往只有幾個像素,在背景雜波中僅占據了搜索區域很小的一部分。在給定一個統計模型的情況下,大多數經典算法均是使用Niemann-Pearson準則來解決檢測問題,并在這一過程中使用廣義似然比檢驗(Generalized Likelihood Ratio Test, GLRT)來推導檢驗的統計量。在某些情況下,產生的誤報概率不依賴于任何未知參數。該特性通常被稱為恒虛警率(Constant False Alarm Rate, CFAR),其在自動目標檢測系統中非常重要。
在已知目標光譜特征的前提下,一種匹配濾波算法通過計算潛在目標的最高信噪比來檢測目標[3]。然而,它不適用于目標光譜特征未知的情況。另一種常見的檢測方法被稱為異常檢測[4],它可以在沒有先驗知識的情況下檢測出與其背景環境在光譜上顯著不同的部分。由Reed和Xiao li提出的RX算法[5]被認為是高光譜圖像異常檢測算法的基準。目前,大多數高光譜檢測算法都側重于使用單幀圖像,主要利用圖像的光譜信息檢測感興趣的目標。然而,為了檢測雜波背景下的低信噪比運動目標,單純的光譜信息是不夠的,時間信息是通過降低背景雜波來提高低信噪比、增強運動目標檢測性能的關鍵。
本文提出了一種基于空時聯合異常檢測的高光譜圖像弱小運動目標的檢測方法。首先,利用經典的異常檢測方法計算空間異常圖,即利用RX算法[5]提取高光譜圖像中的空間異常信息;然后,根據圖像序列中相鄰幀背景相似的特性,計算時域異常圖。此外,根據目標在圖像序列中的運動一致性,計算軌跡預測圖;最后,將上述的空間異常圖、時域異常圖和軌跡預測圖進行融合,得到目標的最終檢測圖。
1 高光譜圖像
高光譜圖像包含幾十個光譜波段,如可見光波段(0.39μm ~0.7μm)、中波紅外輻射(MWIR:3μm~5μm)和長波紅外輻射(LWIR:8μm~12μm)。本文中使用的高光譜圖像序列是通過高光譜相機拍攝而得的。該相機包含可見光和短波紅外光,光譜范圍為0.68μm ~0.96μm,相鄰光譜間的間隔約為10nm[6]。由高光譜傳感器生成的圖像被稱為高光譜數據立方體,每個立方體包含25個波段,由高光譜相機在整個光譜范圍內生成25幅圖像,如圖1所示。

圖1 高光譜數據立方體的生成過程Fig.1 The generation process of hyperspectral image cube
高光譜傳感器產生的高光譜圖像數據量通常是普通紅外圖像的幾倍,這對圖像分析系統在圖像傳輸、存儲和計算等方面的能力提出了挑戰。為了解決這些問題,必須對高光譜圖像進行降維處理,以減少數據量。在本文中,使用主成分分析(Prin-cipal Component Analysis, PCA)[7]法來減少高光譜數據的維數。在高光譜圖像處理過程中,PCA不僅可以降低圖像數據的維數,而且可以對圖像進行簡單的降噪處理。此外,PCA可將原始圖像信息按照協方差矩陣的特征值大小依次排列,即大特征值所對應的前面幾個分量包含了絕大部分有意義的圖像信息數據。因此,PCA的前面幾個分量可被看作是原始高光譜圖像數據的特征。
假設每個輸入的高光譜數據立方體由L個波段組成,且高光譜圖像的每個波段Ii(i=1,2,…,L)具有相同的大小(m×n),那么整個高光譜立方體可以表示為I=[I1,I2,…,IL],其尺寸為m×n×L。PCA的目的是將數據立方體的波段數由L降至k,并生成1個特征矩陣PC(x,y,k),其尺寸為m×n×k,如圖2所示。其中,(x,y)指高光譜圖像中像素點的坐標。在經PCA處理之后,每個像素(x,y)都有1個1×k的特征向量V。

圖2 高光譜數據立方體的PCA降維過程Fig.2 The PCA process of hyperspectral image cube
2 弱小運動目標檢測
本節介紹了一種新的空時聯合異常檢測方法。本方法首先分別計算出了空間異常圖、時間異常圖和軌跡預測圖。然后,將這3張圖進行融合,生成最終的空時聯合異常圖。最后,計算自適應閾值,并根據自適應閾值將目標從背景雜波和噪聲雜波中分割出來。
2.1 算法總體流程
本文提出的空時聯合異常檢測方法的總體架構如圖3所示。在圖3中,PC(x,y,k,t)、S(x,y,t)、T(x,y,t)、P(x,y,t)、STP(x,y,t)分別表示原高光譜數據立方體的主成分、空間異常圖、時域異常圖、軌跡預測圖、空時聯合異常圖,如圖3所示。該方法通過遞歸的方式達到了目標檢測的目的。
解 如圖9所示,將點P受到的5 cm/s的速度用平行四邊形法則可分解為向左3 cm/s,向下4 cm/s,而Q有向上4 cm/s的速度.因為M為PQ的中點,所以考慮豎直方向,受到P,Q兩個相反方向且相等速度量的影響,M并不會產生上下移動;考慮水平方向,點M有向左1.5 cm/s的速度,所以點M的軌跡為一條線段,起點終點分別為BC,BA的中點.所以點M運動路徑為3 cm.

圖3 空時聯合異常檢測方法的流程Fig.3 The work flow of the proposed spatio-temporal anomaly approach
2.2 空間異常圖
空間異常圖適用于空間奇異性的特征挖掘。由于沒有先驗知識,對目標的檢測是通過尋找與周圍背景有很大不同的像素而實現的。RX算法就是其中一種常見的異常檢測算法。RX算法可以表示為
(1)

本方法采用RX算法計算空間異常圖,尋找空間域上的異常像素。空間異常圖S(x,y,t)可被表示為
(2)
式中,Vt為檢測像素的特征向量,μt為PC(x,y,k,t)的特征向量均值,Φt為PC(x,y,k,t)的自協方差。
2.3 時域異常圖
時域異常圖適用于時間域奇異性的特征挖掘。假設前一幀的背景樣本在當前幀中保持不變,從而建立非常準確的時域背景估計。類似于空間異常圖,時域異常圖可被表示為
(3)
式中,Vt+1為檢測像素的特征向量,μt+1為PC(x,y,k,t+1)的特征向量均值。
2.4 軌跡預測圖
為了檢測目標在圖像序列中的運動特征[8],可引入軌跡預測圖,從而更好地提高檢測率并降低虛警率。軌跡預測圖可表示為

(4)
式中,STP(x,y,t-1)為上一幀的空時聯合異常檢測圖,ζ為計算窗口的大小。
2.5 圖像融合過程
為了綜合利用高光譜圖像序列中的空間特征、時域特征和目標的運動特征,可將上述空間異常圖、時域異常圖和軌跡預測圖融合。首先將空間異常圖與時間異常圖進行融合
ST(x,y,t)=N(S(x,y,t))N(T(x,y,t))
(5)
式中,N(·)為min-max歸一化運算,ST(x,y,t)為空時聯合特性。
然后,進一步融合軌跡預測圖,最終的空時異常圖可表示為
STP(x,y,t)=N(ST(x,y,t)+C)·
N(P(x,y,t)+C)
(6)
式中,N(·)為min-max歸一化運算,C為非零常數。在本文中,該常數被設置為1×10-8。設置常數C的目的是保證融合過程中的每個元素都是非零的。
2.6 自適應閾值
最終的空時異常圖STP(x,y,t)表明了弱小運動目標與復雜背景之間的內在差異。為了使信雜比最大化,設置自適應閾值[9]如下
Th=μSTP+kσSTP
(7)
式中,μSTP為空時聯合異常圖STP(x,y,t)的均值,σSTP為空時聯合異常圖STP(x,y,t)的方差,k為經驗常數,在不同的高光譜圖像數據集中可設置為不同的值,在本文的后續實驗中被設置為10。
3 實驗結果
為了檢驗所提出的弱小運動目標檢測方法的性能,本文使用了一個高光譜圖像序列數據集。該數據集中的待檢測目標為云背景下的飛機目標,包括3段高光譜圖像序列、總計超過2000幀的高光譜圖像,如圖4所示。由于目標尺寸較小,很難區分感興趣的目標,此外,云背景和隨機噪聲雜波也增加了目標檢測的難度。

(a)高光譜圖像中的一個波段

(b)該波段三維映射圖4 測試數據集示意圖Fig.4 An illustration of the dataset

圖5 本文提出的空時聯合異常檢測方法的實驗結果Fig.5 The visual results of the proposed spatio-temporal anomaly approach
在實驗中,從原始高光譜圖像序列中依次選取關鍵幀,并對關鍵幀中的運動目標進行精確的標注,以便進行定量評價。在實驗中,PCA將圖像維度降至4維,RX算法的窗口尺寸分別設置為10。首先,驗證了該方法的有效性。在上述參數設置下,對上述數據集中的所有序列進行了測試,實驗結果如圖5所示。在測試序列的第1幀,軌跡預測圖中的每一個像素均被初始化為1,如圖5所示。經過幾輪迭代計算之后,空時聯合異常圖STP(x,y,t)即可準確檢測出感興趣的目標。然后,對本文中的方法的檢測率進行了定量分析,繪制了ROC(Receiver Operating Characteristic)曲線,結果如圖6所示。ROC曲線是根據不同的閾值,以檢測率為縱坐標、以虛警率為橫坐標繪制的曲線。ROC曲線與橫坐標軸圍成的區域的面積越大,目標的識別效果越好。圖6(a)顯示了空間異常圖、時域異常圖與空時聯合異常圖的ROC曲線。圖6表明,通過聯合利用高光譜圖像的空間特性和時間特性,可以顯著提高檢測率。圖6(b)顯示了不同PCA降維維數下的ROC曲線。圖6表明,增加PCA的維數可以提升檢測準確率。
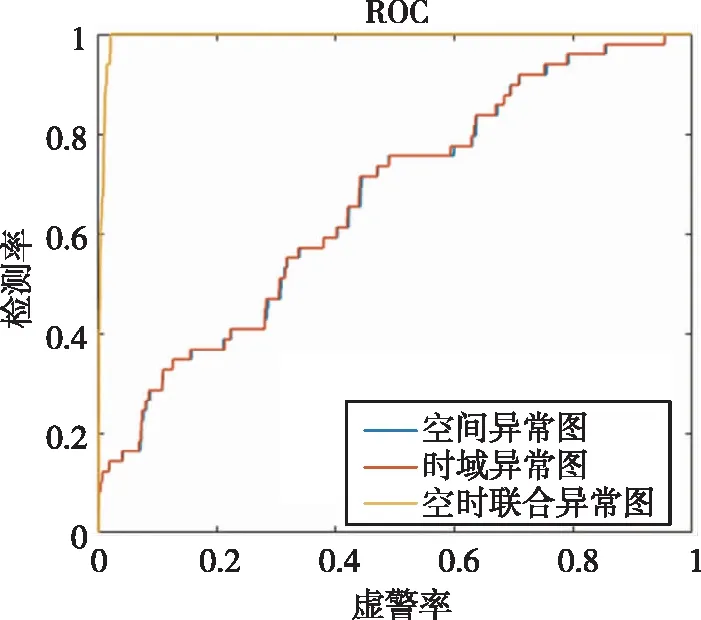
(a)空間異常圖、時域異常圖與空時聯合異常圖的ROC曲線

(b)不同PCA降維維數下的ROC曲線圖6 本文提出的空時聯合異常檢測方法的定量分析Fig.6 The quantitative analysis of the proposed spatio-temporal anomaly approach
4 結 論
本文研究了基于高光譜圖像序列的目標檢測問題,提出了一種新的高光譜圖像序列空時異常處理方法。該方法綜合考慮了高光譜圖像中的空間特征、時域特征和運動特征,通過計算空間異常圖、時間異常圖和軌跡預測圖,得到了目標的檢測結果。實驗結果表明,該方法具有良好的高光譜弱小運動目標檢測性能。在今后的工作中,將繼續改進算法,使其可以適應更為復雜的背景。此外,還將嘗試將該方法擴展到其他高光譜應用領域,如目標識別、目標跟蹤等。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48